基于DeepSeek-V3.2的AI辅助研究车辆纵倾中心过程报告
前言:
本报告笔者是一名机械相关行业从业者,对机械、车辆工程、AI与智能化等领域感兴趣。笔者在工作中观察到,在本科阶段《机械原理》课程中所介绍的机构运动分析方法,如矢量位置方程法、复数矢量法、图解法等,在实际工作应用中通常都面临着繁琐的计算和作图,即便工程应用最方便的图解法,人工绘制也往往耗时耗力,且对不具备编程能力的机械工程师而言,单张人工图解只能展示某一特定几何参数下组合的结果,难以呈现参数变化时对图解的动态影响,在项目交期紧张时,往往不允许工程师花费大量时间在理论计算上,因此,据笔者观察,许多工程师倾向根据工作经验和成熟稳定产品进行快速的类比设计或问题排查,但这通常适用于在某领域有一定工作年限的工程师,初入某领域的工程师往往不具备这样的经验。
得益于近年来AI的发展,AI已经具备了较强的计算和编程能力,笔者在新工作中使用AI,感受到当前是一个很好的契机,去探索学习AI如何辅助工程师进行设计计算,帮助新手工程师快速掌握所属领域的基本工程分析模型,以及复习模糊的专业知识点。
本文所选择车辆工程中的经典问题,也是笔者在AGV项目中所观察到的现象,车辆俯仰运动,整理展示一份近期与AI的对话报告,以“车辆点头现象”为切入点,试图从机械原理的角度深入理解其物理本质,并引导AI通过HTML代码生成一套可交互的运动简图,探讨AI的发展和使用对传统行业从业者的帮助。
(本文记录笔者在使用AI过程中的一些思考和推断,主要供笔者自行学习,或有错漏,欢迎指正和探讨。)
关键词:车辆俯仰运动 、俯仰力矩、轴荷转移、悬挂、牛顿第二定律、非惯性系、重心、惯性力、力对点的矩、力偶矩、纵倾中心、侧倾中心、速度瞬心、三心定理、AGV、平面机构自由度、高副低代、机构运动简图、差速轮、滑动率与滚动率
- 本报告的目的与方法
以AI为协作伙伴,探索一种可交互的技术学习/工程分析模式,具体而言,本文试图回答以下问题:①解析车辆俯仰运动的产生原因;②从工程的角度解释纵倾中心的本质和其对车辆的影响规律;③能否利用AI辅助生成一个参数化的可视化工具,使抽象的纵倾中心概念在图解中直观可调?
- 基础知识点回顾
2.1速度瞬心:由理论力学可知,互作平面相对运动的两构件上瞬时速度相等的重合点,即为此两构件的速度瞬心,简称瞬心,常用符号Pij表示构件i、j间的瞬心,且i<j。若瞬心处的绝对速度为零,则为绝对瞬心,否则为相对瞬心。
2.2三心定理:三心定理(Kennedy定理)是机械原理中用于确定平面平行运动三构件系统瞬心位置的基本定理。该定理指出:作相对平面运动的三个构件,共有三个瞬心,且它们必位于同一直线上。
- 模型简化
3.1原始小车结构
- 两个差速轮居中布置,与车身通过电机输出轴铰接(可自由转动),但电机壳体与车身固连。
- 车尾万向轮与车身刚性连接(仅起支撑)。
- 车头万向轮通过弹簧悬挂与车身铰接(悬挂支架可绕车身铰点摆动,弹簧提供下压力)。
3.2构件划分与运动副
|
构件编号 |
名称 |
包含部件 |
与地面的连接 |
与其他构件的连接 |
|
① |
地面 |
固定参考系 |
— |
与②,与⑤ |
|
② |
差速轮 |
车轮+输出轴 |
纯滚动/滑动高副 → 等效转动副于瞬心 |
与③ |
|
③ |
底盘主体(车体) |
车体+电机壳体+后万向轮 |
— |
与②,与④ |
|
④ |
前悬架支架 |
摆臂 |
— |
与③,与⑤ |
|
⑤ |
前万向轮 |
万向轮 |
纯滚动高副 → 转动副 |
与④ |
- 笔者与AI协作探索的过程
4.1第一轮:从“车辆点头”的力学分析出发
笔者提问:后轮固定,前轮装有弹簧悬挂的车辆,在行驶过程中急刹,假定汽车质量足够不会被掀翻,行驶也能够保持直线,按照我的理解,由于惯性和力矩的作用,前轮悬挂的弹簧会被车重的重心偏移迅速挤压,形成视觉上车辆车头向下“点头”的现象,对么?
(笔者思路:先提出提个相对开放的模型,引导AI查找相关资料分析,通过AI的分析/引用资料的源文档,与自己的思路对照,判断自身思路的大方向是否有误,以及是否有遗忘或模糊以及未考虑到的知识点)
AI初始回答:你的理解完全正确,你描述的正是汽车制动时典型的“点头”现象,其背后的物理机理与你分析的一致,可以拆解为以下几个关键点:
1. 重心偏移与轴荷转移
汽车在匀速行驶时,前后轮承担的车重是静态分配的。当你急刹时,惯性力作用于汽车重心,方向向前。这个惯性力形成了一个俯仰力矩(使车头向下、车尾向上的力矩)。这个力矩会增大前轮对地面的垂直载荷(压力)。同时减小后轮对地面的垂直载荷。
这就是你所说的“车重的重心偏移”。即便后轮没有悬挂(刚性连接),或者前后轮都有悬挂,只要前悬挂是弹性的,这个增加的载荷就会压缩前悬挂的弹簧。
2. 后轮“固定”的特殊性
你特意提到“后轮固定”,这在机械结构上通常指后桥与车架(或车身)是刚性连接(如某些卡车、老式汽车或硬尾车辆)。在这种情况下,“点头”现象会更明显。因为后悬挂没有弹簧来吸收俯仰力矩,整个制动力造成的重心前移和俯仰角度,几乎全部由前悬挂的压缩来承担。如果后轮也有悬挂,后轮会轻微拉伸(抬头),点头幅度会稍小一些;但后轮固定时,后桥无法相对车身向上运动来平衡姿态,车头下沉的幅度在视觉上会更纯粹。
3. 视觉与物理的对应
你描述的“视觉上车头向下”,正是前悬挂弹簧被压缩、车身绕后轴(或后轮接地点)发生微小转动导致的。只要制动力足够大,且前悬挂足够软,这个现象就会非常明显。
(笔者反思:通过AI的分析和其参考源文档的查看,笔者可以确认自己分析的大方向无误,但存在一个知识点的混淆,即重心偏移和轴荷转移,笔者在提问时所理解的重心偏移实际上正确对应的概念应该是轴荷转移,但因长期未接触相关知识点,相关概念已经比较模糊,但通过理论力学的知识仍能理解其本质应是车辆急刹时的惯性力偶矩的作用,因此在进行下一步提问前,笔者先对轴荷转移、俯仰力矩等知识点进行复习(期间借助AI对话-自己的逻辑推导纠错讨论、教材等权威资料查询,具体过程较长故省略),回顾其准确定义、计算公式等具体如下:
俯仰力矩:指使车辆绕其俯仰轴(横向Y轴),发生抬头或点头旋转趋势的力矩。
具体到本文所讨论的车辆刹车点头问题,在刹车时,惯性力向前作用在重心上,而阻止车身向前平移的反力来自地面摩擦力,这两组力不在同一条水平线上,就形成了一个力偶或力矩,导致车身旋转。
注意:
在车辆动力学中,不同的语境下,俯仰力矩的具体定义还有所差异,主要区别在俯仰轴-Y轴的位置,在将整个车辆简化为刚体并假设车轮不具备质量时,俯仰轴是通过车辆质心的横向轴,主要用于汽车运动的基准轴系建立和计算转动惯量等。而在悬架运动学中,用于分析车辆在加速/制动时的俯仰程度,以及进行抗俯仰几何设计时,俯仰轴-Y轴是指通过车辆“纵倾中心”的横向轴。
具体到本文中,我们之所以关心俯仰力矩,是因为它是车辆轴荷转移的根源,并最终导致的悬架弹簧的压缩,也就是我们所观察到的车辆“点头”现象。
这里需要特别注意的一点是,不管是将车辆简化为刚体模型,还是在悬架运动学分析,本文所探讨的车辆刹车点头问题模型背景下,车辆制动时的制动力和惯性力构成一个力偶(即俯仰力矩),该力偶矩大小恒为M=F*hCG(hCG为车辆质心到地面的距离),与纵倾中心P的位置无关。初学者包括笔者,在研究点头问题时,常会犯下这样一种错误,即认为应该先找出纵倾中心P的位置,再通过对该非惯性系小车模型建立静力平衡方程,对P点取矩,求出轴荷转移和悬挂弹簧应该给出的反力大小,在这个过程中错误的认为是纵倾中心P的变化导致了制动力和惯性力对车辆上某支点取矩的变化,从而导致的轴荷转移量的变化,实际上这是一种直觉性的错误(常见于AI给出的,以及网络上各种不准确的轴荷转移方程)。因为惯性力和制动力构成一对力偶M=F*hCG,前轮的轴荷转移
和后轮的轴荷转移
也构成一对力偶M=
*L(L为前后轮轴距),它们对参考系中的任意一点取矩其值大小都是不变的,与纵倾中心P点位置无关;对于这样的结论我们可能会冒出一个疑问---既然造成车辆俯仰运动的成因俯仰力矩M和轴荷转移大小均与纵倾中心P位置无关,为何在悬架运动学的抗俯仰设计中,纵倾中心P的位置还如此重要?引入纵倾中心P的意义何在?
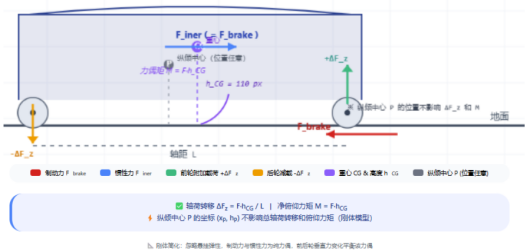
图1:小车刚体模型简化示意
这是因为,在真实场景中(假设刹车程度固定,制动力不变),虽然总载荷转移与纵倾中心无关,但这个力并不是全部由悬挂的弹性部分(弹簧)来承担的。我们可以回顾纵倾中心P的概念:车辆在刹车时,制动力F作用在轮胎接地点(高度0),F通过悬架连杆(控制臂、减震器等)传递到车身,在悬架几何的作用下,这个水平力等效于作用在纵倾中心P上(高度hp)。因此,作用在车身(簧载质量)上的制动等效力有2个,一个是制动力F等效平移至P点的F’,一个是将一个力平移到另一个作用点时,必须附加的一个力偶F*hp(虚拟的效果为使车头上仰);而惯性力作用在质心(高度hCG不变),而净俯仰力矩M=F*hCG也不变,而悬挂的弹性部分(弹簧)的受力却是会变的,因为弹簧的压缩力Fspring需要平衡的力是轴荷转移ΔFz(不变)+制动力平移至纵倾中心P点所产生的附加力偶F*hp(根据P的高度变化而变化)。
而这就直接会影响到悬挂弹簧的压缩量,即“点头”的程度。Fspring=ΔFz*(1-hp/hCG)当纵倾中心高度hp=重心高度hCG时,Fspring=0,弹簧不受外力,完全不点头。比值η=hP/hCG称为抗点头率。因此研究纵倾中心P对我们车辆的抗点头设计至关重要。
通过复习分析明确上述知识要点后,我们开始进入第二轮对话,着手研究纵倾中心P位置的计算方法。
4.2第二轮 描述具体情况和简化模型进行纵倾中心P的计算准备
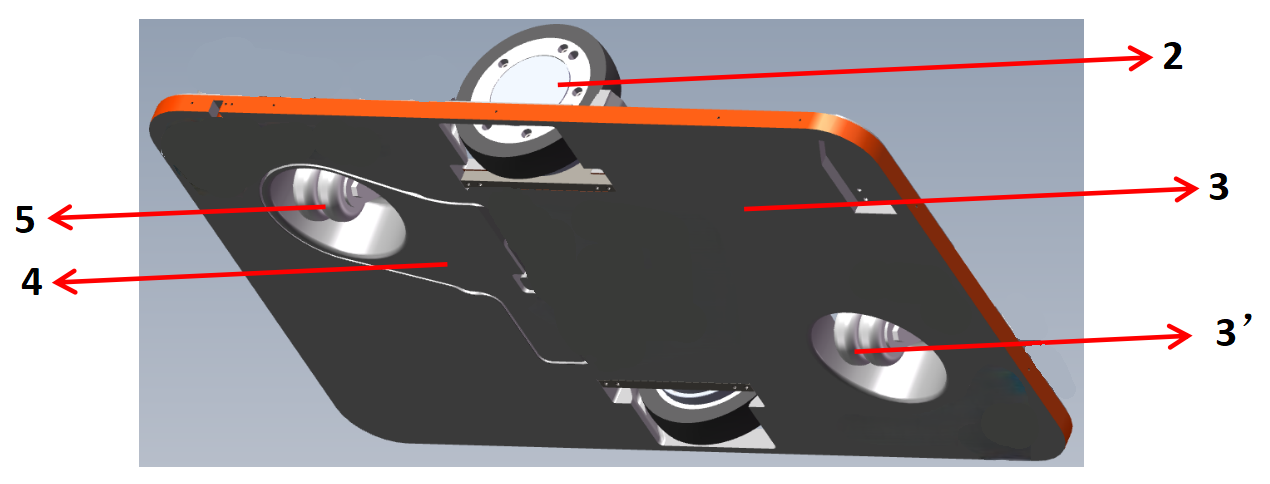
笔者提问:我们讨论一个具体的情况,即一辆差速轮小车,两个差速轮居中布置在车身两侧(刚性螺栓安装连接),车头车尾各有一个万向轮支撑,其中车尾的万向轮固定(基本可看做和车身一体,只起到支撑稳定的作用),车头的万向轮用弹簧悬挂支撑(悬挂一端和车身铰接,一端和万向轮螺栓刚性连接,其实可以将前万向轮和悬挂看做一个整体,悬挂和车身间用弹簧约束使悬挂向下压万向轮贴紧地面)。
在对该车进行点头分析时,寻找纵倾中心简化小车模型时我遇到一个问题,先说说我的简化思路:1、差速轮看做一根连杆,其一端与地面铰接,另一端与车身铰接,车身看做一根连杆,其一端与差速轮铰接,另一端与前万向轮悬挂铰接,前悬挂(含前万向轮)看做一根连杆,其一端和车身铰接,一端通过万向轮和地面接触。问题点在于前万向轮和地面接触的这个运动副,相关知识点我已模糊,不太清楚在分析纵倾时应该简化成什么?并在确定后通过速度瞬心法、三心定理,以HTML代码形式作图,描述该小车模型的纵倾中心位置。
AI回答:
- 直接答案:
简化为铰接(转动副)原因与之前讨论的一致:万向轮与地面之间是纯滚动(假设无滑动)在纯滚动条件下,接触点瞬时速度为零,是车轮相对于地面的速度瞬心根据机械原理中的高副低代,该高副可以等效为一个转动副(位于接触点)因此,无论万向轮是作为从动轮还是带有悬挂,在分析瞬时运动学(求纵倾中心)时,它与地面的接触点都应视为一个固定铰接点(相对于地面静止)。
二、你的简化思路回顾与修正
你提出的三层连杆模型很清晰,我帮你整理一下:
|
构件 |
一端连接 |
另一端连接 |
运动副类型 |
|
差速轮(左/右合并) |
地面(接地点 D) |
车身(轮心 C) |
D处:铰接(地面-轮子) |
|
车身 |
差速轮轮心 C |
前悬挂铰点 G |
刚性连接(C在车身上固定) |
|
前悬挂(含万向轮) |
车身(铰点 G) |
地面(接地点 I) |
G处:铰接(车身-悬挂) |
关键点:
差速轮轮心 C 固定在车身上,所以车身通过 C 点与差速轮连杆相连。
前悬挂是一个刚性摆臂(含万向轮),一端铰接于车身 G,另一端通过万向轮与地面铰接于 I。
弹簧并不改变几何约束,只提供力,因此不引入额外的运动副。
三、为什么前万向轮与地面的接触必须简化为铰接?
你的疑虑可能在于:万向轮本身可以绕垂直轴自由转动,而且它只是支撑作用,在纵向平面内是否真的相当于一个固定铰点?
答案是:在纵向平面(XZ)内,万向轮的表现与普通轮子完全一样。万向轮的垂直轴(转向轴)不影响它在纵向平面内的滚动行为。无论轮子是否可转向,只要它接触地面并纯滚动,其纵向运动就是绕接触点的瞬时转动。因此,在侧视图(纵向平面)中,万向轮的接触点 I 就是地面与悬挂之间的瞬时转动中心,必须简化为铰接。如果不简化为铰接,你将无法应用三心定理,也无法求出车身相对于地面的瞬心(纵倾中心)。
以下是您所需的小车纵倾中心求解作图的HTML代码。它基于您描述的差速轮小车简化模型,在侧视图中通过几何约束求出了车身相对于地面的瞬时转动中心(纵倾中心)。
<!DOCTYPE html>
<html lang="zh-CN">
<head>
<meta charset="UTF-8">
<meta name="viewport" content="width=device-width, initial-scale=1.0, user-scalable=no">
<title>小车纵倾中心求解作图 | 差速轮+前弹簧万向轮模型</title>
<style>
* {
margin: 0;
padding: 0;
box-sizing: border-box;
}
body {
background: #f0f2f5;
display: flex;
justify-content: center;
align-items: center;
min-height: 100vh;
font-family: 'Segoe UI', Roboto, 'Microsoft YaHei', sans-serif;
padding: 20px;
}
.card {
background: white;
border-radius: 28px;
box-shadow: 0 12px 28px rgba(0,0,0,0.1);
padding: 20px 24px 28px 24px;
max-width: 1100px;
width: 100%;
transition: all 0.2s;
}
h1 {
font-size: 1.6rem;
font-weight: 600;
margin-bottom: 0.25rem;
color: #1e2a3a;
display: flex;
align-items: center;
gap: 10px;
}
h1 small {
font-size: 0.8rem;
font-weight: normal;
background: #e9ecef;
padding: 4px 12px;
border-radius: 40px;
color: #2c3e50;
}
.sub {
color: #5a6874;
border-left: 3px solid #3b82f6;
padding-left: 14px;
margin: 12px 0 20px 0;
font-size: 0.9rem;
}
.canvas-container {
background: #fefefe;
border-radius: 24px;
box-shadow: 0 2px 8px rgba(0,0,0,0.05);
padding: 12px;
border: 1px solid #e2e8f0;
}
canvas {
display: block;
width: 100%;
height: auto;
background: #ffffff;
border-radius: 16px;
cursor: pointer;
}
.legend {
display: flex;
flex-wrap: wrap;
gap: 20px;
margin: 20px 0 16px 0;
font-size: 0.8rem;
background: #f8fafc;
padding: 12px 18px;
border-radius: 20px;
}
.legend-item {
display: flex;
align-items: center;
gap: 8px;
}
.color-badge {
width: 22px;
height: 14px;
border-radius: 20px;
}
.formula {
background: #f1f5f9;
padding: 12px 18px;
border-radius: 20px;
font-family: 'Courier New', 'Fira Code', monospace;
font-size: 0.85rem;
margin: 16px 0 8px 0;
border-left: 4px solid #3b82f6;
}
.step-list {
margin-top: 16px;
padding-left: 20px;
color: #2c3e50;
}
.step-list li {
margin: 8px 0;
line-height: 1.4;
}
footer {
font-size: 0.7rem;
text-align: center;
color: #94a3b8;
margin-top: 24px;
border-top: 1px solid #e2e8f0;
padding-top: 16px;
}
@media (max-width: 700px) {
.card { padding: 16px; }
h1 { font-size: 1.3rem; }
}
</style>
</head>
<body>
<div class="card">
<h1>
📐 纵倾中心几何作图
<small>差速轮 + 前弹簧万向轮 · 侧视图</small>
</h1>
<div class="sub">
🧩 基于三心定理 | 车身相对于地面的瞬时转动中心 (纵倾中心)
</div>
<div class="canvas-container">
<canvas id="pitchCanvas" width="900" height="520" style="width:100%; height:auto; max-width:900px; aspect-ratio:900/520"></canvas>
</div>
<div class="legend">
<div class="legend-item"><div class="color-badge" style="background:#1e3a8a;"></div> 车身 (刚体)</div>
<div class="legend-item"><div class="color-badge" style="background:#10b981;"></div> 差速轮连杆 (CD)</div>
<div class="legend-item"><div class="color-badge" style="background:#f59e0b;"></div> 前悬挂连杆 (GI)</div>
<div class="legend-item"><div class="color-badge" style="background:#ef4444;"></div> 速度方向约束 (⊥连杆)</div>
<div class="legend-item"><div class="color-badge" style="background:#8b5cf6;"></div> 纵倾中心 P (瞬心)</div>
<div class="legend-item"><div class="color-badge" style="background:#475569;"></div> 地面 & 铰接点</div>
</div>
<div class="formula">
🔍 纵倾中心 P 的确定:<br>
• C点速度方向 ⊥ CD (差速轮绕D点转动)<br>
• G点速度方向 ⊥ GI (前悬挂绕I点转动)<br>
• 车身作平面运动 → 过C和G作垂线,交点P即为车身瞬心 (纵倾中心)
</div>
<ul class="step-list">
<li>✅ <strong>模型简化</strong>:差速轮 → 连杆 CD (D铰接地面,C铰接车身且轮心与车身固定)</li>
<li>✅ <strong>前万向轮+弹簧悬挂</strong> → 连杆 GI (G铰接车身,I铰接地面,纯滚动 → 高副低代为转动副)</li>
<li>✅ <strong>后万向轮固定</strong> (与车身一体) 提供辅助支撑,不改变纵倾中心本质 (约束自动满足)</li>
<li>📐 <strong>作图核心</strong>:分别作 C 点速度垂线 (垂直于 CD) 和 G 点速度垂线 (垂直于 GI),交点 P 即为纵倾中心。</li>
<li>🧠 <strong>物理意义</strong>:P点离地高度 h_R 决定了制动点头力矩修正: M_actual = F_brake × (h_CG - h_R)</li>
</ul>
<footer>
⚙️ 基于平面运动学三心定理 | 假设纯滚动无滑动 | 坐标经合理比例调整以便观察
</footer>
</div>
<script>
(function() {
const canvas = document.getElementById('pitchCanvas');
const ctx = canvas.getContext('2d');
const width = 900, height = 520;
canvas.width = width;
canvas.height = height;
// ---------- 定义几何点 (坐标单位: px, 地面位于 Y = 400) ----------
const groundY = 400; // 地面高度 (Y坐标)
// 差速轮: 接地点 D, 轮心 C (C固定在车身上, 且 CD 垂直地面简化,实际也可以不垂直,但便于理解垂直布置)
const D = { x: 200, y: groundY };
const radiusWheel = 45; // 轮子半径视觉表现
const C = { x: D.x, y: D.y - radiusWheel }; // 轮心在接地点正上方
// 前悬挂 + 万向轮: 车身铰点 G , 接地点 I (I在地面)
const I = { x: 620, y: groundY };
// G点: 车身上一点 (前悬上铰点),实际坐标使 GI 长度和角度合理
const G = { x: 540, y: groundY - 72 }; // GI 长度约 78px, 明显倾斜
// 车尾固定万向轮示意: 只是辅助,为了完整性画出一个后轮接地点 F 和车身对应点 E (刚性)
const F_rear = { x: 40, y: groundY };
const E_rear = { x: F_rear.x, y: groundY - radiusWheel }; // 固定轮心与车身一体
// 车身: 我们通过一条折线或封闭区域表示, 车身关键点包括 C , G , 以及尾部 E_rear
// 为了视觉美观,额外增加一个车身顶部轮廓点
const bodyTopFront = { x: G.x + 15, y: G.y - 38 };
const bodyTopRear = { x: E_rear.x - 20, y: E_rear.y - 38 };
const bodyMid = { x: C.x + 25, y: C.y - 20 };
// ---------- 计算纵倾中心 P ----------
// 1. 过C点作垂直于CD的直线 (C点速度方向线)
// 向量 CD = D - C = (0, radiusWheel) 垂直方向,因此垂直于CD的方向为水平方向 (左右)
// 但因为差速轮连杆CD是竖直的,C点速度方向必须垂直于CD => 水平方向 (向左或右)
// 我们取过C的水平线 (因为垂直CD的线是水平线)
// 2. 过G点作垂直于GI的直线
const vecGI = { x: I.x - G.x, y: I.y - G.y };
// 垂直于GI的向量 (旋转90°) : ( -dy, dx ) 或 ( dy, -dx )
const perp = { x: -vecGI.y, y: vecGI.x };
// 过G点直线方程: (X - G.x, Y - G.y) 与 perp 平行 => 参数形式
// 水平线: Y = C.y
// 求交点 P: 满足 Y = C.y 且 在过G的直线上
const lineG_slope = perp.y / perp.x; // 斜率 (perp.x 可能为0,需处理)
let Px, Py;
if (Math.abs(perp.x) < 1e-6) {
// 垂线接近竖直, 则过G的垂线为 X = G.x
Px = G.x;
Py = C.y;
} else {
// 参数方程: (X, Y) = (G.x, G.y) + t * (perp.x, perp.y)
// 要求 Y = C.y => G.y + t * perp.y = C.y => t = (C.y - G.y) / perp.y
const t = (C.y - G.y) / perp.y;
Px = G.x + t * perp.x;
Py = C.y;
}
const P = { x: Px, y: Py };
// 避免瞬心超出画布太远,但我们要显示连线,确保画布范围合理
// 绘制辅助线延长范围适度裁剪
// ---------- 绘图函数 ----------
function draw() {
ctx.clearRect(0, 0, width, height);
// 1. 背景网格 (极浅参考线)
ctx.save();
ctx.strokeStyle = "#e9ecef";
ctx.lineWidth = 0.5;
for (let y = 80; y < height; y += 40) {
ctx.beginPath();
ctx.moveTo(0, y);
ctx.lineTo(width, y);
ctx.stroke();
}
for (let x = 60; x < width; x += 60) {
ctx.beginPath();
ctx.moveTo(x, 0);
ctx.lineTo(x, height);
ctx.stroke();
}
// 2. 地面 (加粗实线 + 阴影)
ctx.beginPath();
ctx.moveTo(0, groundY);
ctx.lineTo(width, groundY);
ctx.strokeStyle = "#475569";
ctx.lineWidth = 2.5;
ctx.stroke();
ctx.lineWidth = 1;
ctx.beginPath();
ctx.moveTo(0, groundY+2);
ctx.lineTo(width, groundY+2);
ctx.strokeStyle = "#cbd5e1";
ctx.stroke();
// 3. 差速轮连杆 CD (绿色)
ctx.beginPath();
ctx.moveTo(C.x, C.y);
ctx.lineTo(D.x, D.y);
ctx.strokeStyle = "#10b981";
ctx.lineWidth = 3;
ctx.stroke();
// 轮子示意 (圆)
ctx.beginPath();
ctx.arc(C.x, C.y, radiusWheel-2, 0, Math.PI*2);
ctx.fillStyle = "#d1fae5";
ctx.fill();
ctx.strokeStyle = "#059669";
ctx.lineWidth = 1.5;
ctx.stroke();
ctx.fillStyle = "#2c3e50";
ctx.font = "bold 13px 'Segoe UI'";
ctx.fillText("差速轮", C.x-28, C.y-8);
// 4. 前悬挂连杆 GI (橙色)
ctx.beginPath();
ctx.moveTo(G.x, G.y);
ctx.lineTo(I.x, I.y);
ctx.strokeStyle = "#f59e0b";
ctx.lineWidth = 3;
ctx.stroke();
// 弹簧悬挂示意 (波浪线简化)
ctx.beginPath();
for (let i=0; i<12; i++) {
const t = i/11;
const midX = G.x + (I.x - G.x)*t;
const midY = G.y + (I.y - G.y)*t;
if(i%2===0) ctx.lineTo(midX+3, midY-4);
else ctx.lineTo(midX-3, midY+4);
}
ctx.strokeStyle = "#d97706";
ctx.lineWidth = 1.8;
ctx.stroke();
ctx.fillStyle = "#b45309";
ctx.font = "italic 12px 'Segoe UI'";
ctx.fillText("前悬挂+万向轮", (G.x+I.x)/2-35, (G.y+I.y)/2-10);
// 5. 车身 (蓝色区域 + 轮廓)
ctx.beginPath();
ctx.moveTo(E_rear.x, E_rear.y);
ctx.lineTo(bodyTopRear.x, bodyTopRear.y);
ctx.lineTo(bodyTopFront.x, bodyTopFront.y);
ctx.lineTo(G.x, G.y);
ctx.lineTo(C.x, C.y);
ctx.lineTo(E_rear.x, E_rear.y);
ctx.fillStyle = "rgba(30, 58, 138, 0.15)";
ctx.fill();
ctx.strokeStyle = "#1e3a8a";
ctx.lineWidth = 2;
ctx.stroke();
// 车身内部简单文字
ctx.fillStyle = "#1e3a8a";
ctx.font = "bold 14px 'Segoe UI'";
ctx.fillText("车身", (C.x+G.x)/2+10, C.y-28);
// 6. 后固定万向轮 (灰色,示意)
ctx.beginPath();
ctx.arc(E_rear.x, E_rear.y, radiusWheel-5, 0, Math.PI*2);
ctx.fillStyle = "#e2e8f0";
ctx.fill();
ctx.strokeStyle = "#64748b";
ctx.stroke();
ctx.fillStyle = "#334155";
ctx.fillText("后万向轮(固定)", E_rear.x-35, E_rear.y-8);
// 从车身E到F连线(刚性轮架)
ctx.beginPath();
ctx.moveTo(E_rear.x, E_rear.y);
ctx.lineTo(F_rear.x, F_rear.y);
ctx.strokeStyle = "#94a3b8";
ctx.setLineDash([4,6]);
ctx.stroke();
ctx.setLineDash([]);
// 7. 标注铰接点 (圆圈)
const drawJoint = (pt, label, color) => {
ctx.beginPath();
ctx.arc(pt.x, pt.y, 5, 0, 2*Math.PI);
ctx.fillStyle = color;
ctx.fill();
ctx.strokeStyle = "#1e293b";
ctx.lineWidth = 1;
ctx.stroke();
ctx.fillStyle = "#0f172a";
ctx.font = "500 12px 'Segoe UI'";
ctx.shadowBlur = 0;
ctx.fillText(label, pt.x+6, pt.y-3);
};
drawJoint(D, "D (差速轮接地点)", "#475569");
drawJoint(C, "C (轮心/车身固定点)", "#1e3a8a");
drawJoint(G, "G (前悬上铰点)", "#1e3a8a");
drawJoint(I, "I (前万向轮接地点)", "#475569");
drawJoint(E_rear, "E (后轮心/车身)", "#1e3a8a");
drawJoint(F_rear, "F (后轮接地点)", "#475569");
// 8. 速度约束线: 过C水平线 (C点速度方向 ⊥ CD)
ctx.beginPath();
ctx.moveTo(C.x - 140, C.y);
ctx.lineTo(C.x + 180, C.y);
ctx.strokeStyle = "#ef4444";
ctx.lineWidth = 2.2;
ctx.setLineDash([8, 8]);
ctx.stroke();
ctx.fillStyle = "#ef4444";
ctx.font = "500 11px monospace";
ctx.fillText("v_C ⊥ CD (水平)", C.x+30, C.y-6);
// 过G点垂直于GI的直线
// 计算直线两端延伸
let lineStart, lineEnd;
const extend = 180;
if (Math.abs(perp.x) > 0.01) {
const slope = perp.y / perp.x;
// 求取两个端点: X范围 G.x - extend 到 G.x + extend
const x1 = G.x - extend;
const y1 = G.y + slope * (-extend);
const x2 = G.x + extend;
const y2 = G.y + slope * extend;
lineStart = { x: x1, y: y1 };
lineEnd = { x: x2, y: y2 };
} else {
// 垂直线情况
lineStart = { x: G.x, y: G.y - extend };
lineEnd = { x: G.x, y: G.y + extend };
}
ctx.beginPath();
ctx.moveTo(lineStart.x, lineStart.y);
ctx.lineTo(lineEnd.x, lineEnd.y);
ctx.strokeStyle = "#ef4444";
ctx.lineWidth = 2.2;
ctx.stroke();
ctx.fillStyle = "#ef4444";
ctx.fillText("v_G ⊥ GI", G.x+20, G.y-8);
ctx.setLineDash([]);
// 9. 标注纵倾中心 P (紫色星标)
if (P.x >= -100 && P.x <= width+100 && P.y >= -50 && P.y <= height+80) {
ctx.beginPath();
ctx.arc(P.x, P.y, 8, 0, 2*Math.PI);
ctx.fillStyle = "#8b5cf6";
ctx.shadowBlur = 4;
ctx.shadowColor = "rgba(139,92,246,0.5)";
ctx.fill();
ctx.shadowBlur = 0;
ctx.fillStyle = "white";
ctx.font = "bold 14px 'Segoe UI'";
ctx.fillText("P", P.x-4, P.y+4);
ctx.fillStyle = "#6d28d9";
ctx.font = "bold 12px monospace";
ctx.fillText("纵倾中心", P.x+8, P.y-6);
// 画出从P到C和P到G的虚线(辅助理解瞬心)
ctx.beginPath();
ctx.moveTo(P.x, P.y);
ctx.lineTo(C.x, C.y);
ctx.strokeStyle = "#a78bfa";
ctx.setLineDash([6, 8]);
ctx.stroke();
ctx.beginPath();
ctx.moveTo(P.x, P.y);
ctx.lineTo(G.x, G.y);
ctx.stroke();
ctx.setLineDash([]);
} else {
// 如果瞬心太远,在角落显示文字提示
ctx.fillStyle = "#ef4444";
ctx.font = "500 12px sans-serif";
ctx.fillText("⚠ 纵倾中心位于画布外 (计算有效)", width-200, 40);
// 仍然显示一个指向性箭头
ctx.beginPath();
ctx.moveTo(P.x*0.3+200, P.y*0.2+50);
ctx.lineTo(P.x*0.2+150, P.y*0.1+30);
ctx.stroke();
}
// 额外显示几何关系: 标注CD和GI的垂线示意小标识
ctx.beginPath();
ctx.moveTo(C.x+20, C.y);
ctx.lineTo(C.x+32, C.y);
ctx.lineTo(C.x+26, C.y-6);
ctx.moveTo(C.x+20, C.y);
ctx.lineTo(C.x+32, C.y);
ctx.lineTo(C.x+26, C.y+6);
ctx.strokeStyle = "#ef4444";
ctx.lineWidth = 1.5;
ctx.stroke();
// 在G点附近画垂直符号示意
const angle = Math.atan2(perp.y, perp.x);
const perpDir = { x: Math.cos(angle), y: Math.sin(angle) };
const off = 14;
ctx.beginPath();
ctx.moveTo(G.x + perpDir.x*off, G.y + perpDir.y*off);
ctx.lineTo(G.x + perpDir.x*off - perpDir.y*5, G.y + perpDir.y*off + perpDir.x*5);
ctx.lineTo(G.x + perpDir.x*off + perpDir.y*5, G.y + perpDir.y*off - perpDir.x*5);
ctx.fillStyle = "#ef4444";
ctx.fill();
// 10. 标注重要长度/高度 h_R (纵倾中心离地高度)
if (P.y < groundY && P.y > 0) {
ctx.beginPath();
ctx.moveTo(P.x+12, P.y);
ctx.lineTo(P.x+12, groundY);
ctx.strokeStyle = "#6b7280";
ctx.lineWidth = 1.5;
ctx.setLineDash([2,4]);
ctx.stroke();
ctx.fillStyle = "#4b5563";
ctx.font = "500 11px monospace";
ctx.fillText(`h_R = ${Math.abs(groundY - P.y).toFixed(0)} px`, P.x+15, (P.y+groundY)/2);
ctx.setLineDash([]);
} else if (P.y > groundY) {
ctx.fillStyle = "#ef4444";
ctx.fillText("纵倾中心位于地面以下 (抗点头为负)", P.x+20, P.y-12);
}
// 增加车身重心示意 (假设位于车身中部附近,仅示意)
const CG_approx = { x: (C.x + G.x + E_rear.x)/3 + 10, y: (C.y + G.y + E_rear.y)/3 - 12 };
ctx.beginPath();
ctx.arc(CG_approx.x, CG_approx.y, 6, 0, 2*Math.PI);
ctx.fillStyle = "#dc2626";
ctx.fill();
ctx.fillStyle = "white";
ctx.font = "bold 10px sans-serif";
ctx.fillText("CG", CG_approx.x-3, CG_approx.y+2);
ctx.fillStyle = "#b91c1c";
ctx.font = "italic 10px";
ctx.fillText("重心 (示意)", CG_approx.x+8, CG_approx.y-4);
// 显示图框说明
ctx.font = "normal 11px 'Segoe UI'";
ctx.fillStyle = "#2d3e50";
ctx.fillText("📍 纵倾中心 P = 两条速度约束线的交点", width-210, 30);
ctx.fillText("🚗 制动时车身绕P点瞬时转动", width-210, 48);
}
draw();
// 响应窗口大小自适应保留比例 (无缩放干扰)
window.addEventListener('resize', () => { draw(); });
})();
</script>
</body>
</html>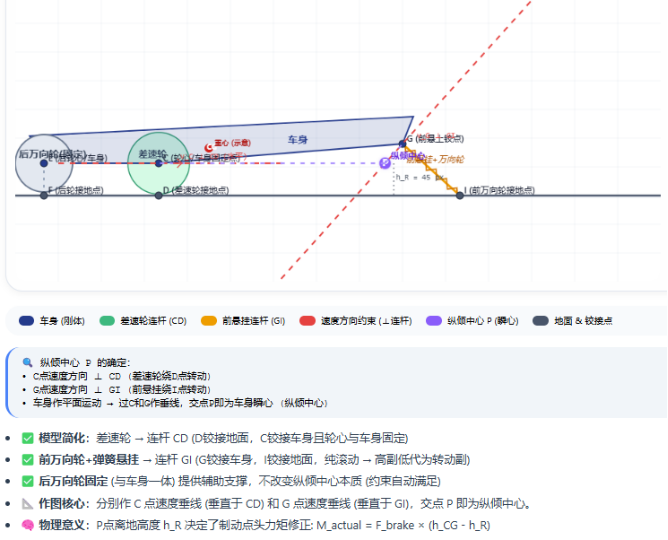
图2 小车机构简图速度瞬心法求纵倾中心图解V1
4.3第三轮 将AI的图解与自己的理解进行比对,判断正误并RUN给AI进行校核
经过对比后笔者发现AI的作图与笔者的理解不一致,因此进入第三轮对话,阐述说明自己的作图方法,并以此对AI上一轮的结果进行挑战。
笔者提问:你绘制的小车简化模型图我认为正确,但找纵倾中心的作图我认为有疑议,说一下我的想法:令地面为构件1、差速轮位构件2、车身为构件3、前悬架为构件4、我们要求的是瞬心i13,借用你之前绘制的图来说明,瞬心i12为点D,瞬心i23为点C,瞬心i14为点I,瞬心i34为点G,由3心定理,i13必在i12和i23的连线上,且i13必在i14和i43的连线上,因此i13必然为i12和i23的连线与i14和i43的连线的交点。你认为我的分析是否正确,如果正确,在上一张图的小车简化模型基础上帮我用HTML代码格式作图。
AI回答:更新代码图解如下
<!DOCTYPE html>
<html lang="zh-CN">
<head>
<meta charset="UTF-8">
<meta name="viewport" content="width=device-width, initial-scale=1.0, user-scalable=no">
<title>三心定理求纵倾中心 | 差速轮+前弹簧万向轮小车模型</title>
<style>
* {
margin: 0;
padding: 0;
box-sizing: border-box;
}
body {
background: #eef2f5;
display: flex;
justify-content: center;
align-items: center;
min-height: 100vh;
font-family: 'Segoe UI', Roboto, 'Helvetica Neue', sans-serif;
padding: 24px;
}
.diagram-container {
background: #ffffff;
border-radius: 32px;
box-shadow: 0 20px 35px -12px rgba(0,0,0,0.2);
padding: 20px 24px 28px 24px;
max-width: 1200px;
width: 100%;
transition: all 0.2s;
}
h1 {
font-size: 1.8rem;
font-weight: 600;
color: #0f2b3d;
display: flex;
align-items: baseline;
gap: 12px;
flex-wrap: wrap;
margin-bottom: 8px;
}
h1 small {
font-size: 0.85rem;
font-weight: 500;
background: #e9edf2;
padding: 4px 14px;
border-radius: 60px;
color: #2c4c6c;
}
.subhead {
border-left: 4px solid #3b82f6;
padding-left: 16px;
margin: 10px 0 20px 0;
color: #2c3e50;
font-size: 0.95rem;
font-weight: 450;
}
.canvas-wrapper {
background: #fefefe;
border-radius: 24px;
box-shadow: 0 4px 14px rgba(0,0,0,0.05);
border: 1px solid #dee4ec;
padding: 12px;
margin-bottom: 20px;
}
canvas {
display: block;
width: 100%;
height: auto;
background: #ffffff;
border-radius: 20px;
box-shadow: 0 2px 6px rgba(0,0,0,0.05);
}
.legend {
display: flex;
flex-wrap: wrap;
gap: 28px;
background: #f8fafc;
padding: 12px 20px;
border-radius: 40px;
margin: 16px 0 12px;
font-size: 0.8rem;
}
.legend span {
display: inline-flex;
align-items: center;
gap: 8px;
}
.color-badge {
width: 24px;
height: 14px;
border-radius: 20px;
display: inline-block;
}
.explain {
background: #f1f5f9;
padding: 14px 20px;
border-radius: 24px;
font-family: 'Fira Code', 'Courier New', monospace;
font-size: 0.85rem;
margin: 12px 0 10px;
border-left: 5px solid #3b82f6;
line-height: 1.45;
}
.step-list {
padding-left: 24px;
margin-top: 12px;
color: #1e2f3e;
}
.step-list li {
margin: 8px 0;
line-height: 1.4;
}
footer {
text-align: center;
font-size: 0.7rem;
color: #7e8c9e;
margin-top: 22px;
border-top: 1px solid #e2e8f0;
padding-top: 16px;
}
@media (max-width: 760px) {
.diagram-container { padding: 16px; }
h1 { font-size: 1.4rem; }
}
</style>
</head>
<body>
<div class="diagram-container">
<h1>
📐 纵倾中心 (i₁₃) 求解 · 三心定理
<small>差速轮 + 前弹簧万向轮 | 侧视图</small>
</h1>
<div class="subhead">
🔍 构件定义:①地面 ②差速轮 ③车身 ④前悬架(含万向轮)<br>
🧷 瞬心:i₁₂ = D | i₂₃ = C | i₁₄ = I | i₃₄ = G<br>
⚡ 由三心定理:i₁₃ 必在直线(D-C)上,也必在直线(I-G)上 → 交点即为纵倾中心
</div>
<div class="canvas-wrapper">
<canvas id="pitchCanvas" width="1050" height="600" style="width:100%; height:auto; max-width:1050px; aspect-ratio:1050/600"></canvas>
</div>
<div class="legend">
<span><div class="color-badge" style="background:#1e3a8a;"></div> 车身 (构件③)</span>
<span><div class="color-badge" style="background:#0d9488;"></div> 差速轮连杆 (构件②)</span>
<span><div class="color-badge" style="background:#eab308;"></div> 前悬挂+万向轮 (构件④)</span>
<span><div class="color-badge" style="background:#475569;"></div> 地面 (构件①)</span>
<span><div class="color-badge" style="background:#dc2626;"></div> 瞬心连线 (i₁₂i₂₃ & i₁₄i₃₄)</span>
<span><div class="color-badge" style="background:#8b5cf6;"></div> 纵倾中心 i₁₃ (P)</span>
</div>
<div class="explain">
✨ 三心定理计算:i₁₃ = (直线 i₁₂–i₂₃) ∩ (直线 i₁₄–i₃₄)<br>
➤ 图中已绘制两条辅助红线并求交点P → 即为车身相对于地面的瞬时转动中心(纵倾中心)<br>
➤ 物理意义:制动时车身绕P点转动,点头力矩 M = F_brake × (h_CG - h_P)
</div>
<ul class="step-list">
<li>✅ <strong>模型简化</strong>:差速轮与地面铰接于D(i₁₂),与车身铰接于C(i₂₃);前悬架(含万向轮)与地面铰接于I(i₁₄),与车身铰接于G(i₃₄)。</li>
<li>✅ <strong>纯滚动假设</strong>:所有轮组与地面接触点均按高副低代处理为转动副(速度瞬心)。</li>
<li>✅ <strong>作图核心</strong>:连接 D–C 得到直线 L₁,连接 I–G 得到直线 L₂,交点 P 即为 i₁₃。</li>
<li>📐 <strong>与速度垂线法等价</strong>:D–C 连线方向即轮心相对地面瞬心的径向,该线垂直于C点速度方向;I–G连线同理。</li>
<li>🧠 <strong>后固定万向轮</strong>(与车身一体)仅辅助支撑,不改变纵倾中心本质,约束自动满足。</li>
</ul>
<footer>
🧪 基于平面运动学三心定理 | 坐标经合理布局便于观察 | 纵倾中心高度 h_P 直接影响制动俯仰响应
</footer>
</div>
<script>
(function() {
const canvas = document.getElementById('pitchCanvas');
const ctx = canvas.getContext('2d');
const w = 1050, h = 600;
canvas.width = w;
canvas.height = h;
// ---------- 几何定义 (单位: px) ----------
const groundY = 480; // 地面线高度
// 差速轮: 接地点 D (i12) , 轮心 C (i23)
const D = { x: 240, y: groundY };
const wheelRadius = 52;
const C = { x: D.x, y: D.y - wheelRadius }; // 轮心垂直向上
// 前悬挂+万向轮: 接地点 I (i14) , 车身铰点 G (i34)
const I = { x: 760, y: groundY };
// G点坐标设计: 让GI有一定倾斜且与车身连接自然
const G = { x: 660, y: groundY - 84 };
// 后固定万向轮 (与车身一体, 仅示意)
const rearGround = { x: 70, y: groundY };
const rearWheelCenter = { x: rearGround.x, y: groundY - wheelRadius };
// 车身轮廓补充点 (用于视觉表现)
const bodyFrontTop = { x: G.x + 38, y: G.y - 44 };
const bodyRearTop = { x: rearWheelCenter.x - 28, y: rearWheelCenter.y - 46 };
const bodyMidExtra = { x: C.x + 34, y: C.y - 28 };
// ---------- 三心定理求 i13 (纵倾中心 P) ----------
// 直线1: 通过 D 和 C
// 直线2: 通过 I 和 G
// 求交点 P = (x, y)
function lineIntersection(p1, p2, p3, p4) {
const denom = (p1.x - p2.x) * (p3.y - p4.y) - (p1.y - p2.y) * (p3.x - p4.x);
if (Math.abs(denom) < 1e-6) return null; // 平行
const t = ((p1.x - p3.x) * (p3.y - p4.y) - (p1.y - p3.y) * (p3.x - p4.x)) / denom;
const x = p1.x + t * (p2.x - p1.x);
const y = p1.y + t * (p2.y - p1.y);
return { x, y };
}
const P = lineIntersection(D, C, I, G);
// 确保交点存在(应当存在)
const pitchCenter = P || { x: (D.x+C.x+I.x+G.x)/4, y: groundY - 120 }; // fallback
// ---------- 绘图 ----------
function draw() {
ctx.clearRect(0, 0, w, h);
// 1. 浅色参考网格
ctx.save();
ctx.strokeStyle = "#e9edf2";
ctx.lineWidth = 0.6;
for (let y = 60; y < h; y += 50) {
ctx.beginPath();
ctx.moveTo(0, y);
ctx.lineTo(w, y);
ctx.stroke();
}
for (let x = 70; x < w; x += 70) {
ctx.beginPath();
ctx.moveTo(x, 0);
ctx.lineTo(x, h);
ctx.stroke();
}
// 2. 地面 (加粗深色)
ctx.beginPath();
ctx.moveTo(0, groundY);
ctx.lineTo(w, groundY);
ctx.strokeStyle = "#334155";
ctx.lineWidth = 3;
ctx.stroke();
ctx.beginPath();
ctx.moveTo(0, groundY+3);
ctx.lineTo(w, groundY+3);
ctx.strokeStyle = "#cbd5e1";
ctx.lineWidth = 1.2;
ctx.stroke();
ctx.fillStyle = "#2c3e50";
ctx.font = "500 13px 'Segoe UI'";
ctx.fillText("地面 (构件①)", w-110, groundY-6);
// 3. 差速轮连杆 CD (构件②)
ctx.beginPath();
ctx.moveTo(C.x, C.y);
ctx.lineTo(D.x, D.y);
ctx.strokeStyle = "#0d9488";
ctx.lineWidth = 4;
ctx.stroke();
// 轮子圆示意
ctx.beginPath();
ctx.arc(C.x, C.y, wheelRadius-3, 0, Math.PI*2);
ctx.fillStyle = "#ccf0e8";
ctx.fill();
ctx.strokeStyle = "#0f766e";
ctx.lineWidth = 1.8;
ctx.stroke();
ctx.fillStyle = "#115e59";
ctx.font = "500 13px 'Segoe UI'";
ctx.fillText("差速轮", C.x-38, C.y-8);
// 4. 前悬挂连杆 GI (构件④) + 弹簧示意
ctx.beginPath();
ctx.moveTo(G.x, G.y);
ctx.lineTo(I.x, I.y);
ctx.strokeStyle = "#eab308";
ctx.lineWidth = 4;
ctx.stroke();
// 简易弹簧装饰 (波浪线)
ctx.beginPath();
for (let step = 0; step <= 14; step++) {
const t = step / 14;
const px = G.x + (I.x - G.x) * t;
const py = G.y + (I.y - G.y) * t;
if (step % 2 === 0) ctx.lineTo(px + 5, py - 5);
else ctx.lineTo(px - 5, py + 5);
}
ctx.strokeStyle = "#ca8a04";
ctx.lineWidth = 2;
ctx.stroke();
ctx.fillStyle = "#a16207";
ctx.font = "italic 12px 'Segoe UI'";
ctx.fillText("前悬架+万向轮", (G.x+I.x)/2-50, (G.y+I.y)/2-14);
// 5. 车身 (构件③) 蓝色区域 + 轮廓
ctx.beginPath();
ctx.moveTo(rearWheelCenter.x, rearWheelCenter.y);
ctx.lineTo(bodyRearTop.x, bodyRearTop.y);
ctx.lineTo(bodyFrontTop.x, bodyFrontTop.y);
ctx.lineTo(G.x, G.y);
ctx.lineTo(C.x, C.y);
ctx.lineTo(rearWheelCenter.x, rearWheelCenter.y);
ctx.fillStyle = "rgba(30, 58, 138, 0.18)";
ctx.fill();
ctx.strokeStyle = "#1e3a8a";
ctx.lineWidth = 2.5;
ctx.stroke();
ctx.fillStyle = "#1e3a8a";
ctx.font = "bold 15px 'Segoe UI'";
ctx.fillText("车身", (C.x+G.x)/2+20, C.y-32);
// 6. 后固定万向轮 (与车身一体)
ctx.beginPath();
ctx.arc(rearWheelCenter.x, rearWheelCenter.y, wheelRadius-6, 0, Math.PI*2);
ctx.fillStyle = "#e2e8f0";
ctx.fill();
ctx.strokeStyle = "#64748b";
ctx.stroke();
ctx.fillStyle = "#334155";
ctx.fillText("后万向轮(固定)", rearWheelCenter.x-45, rearWheelCenter.y-10);
// 连接线示意刚性
ctx.beginPath();
ctx.moveTo(rearWheelCenter.x, rearWheelCenter.y);
ctx.lineTo(rearGround.x, rearGround.y);
ctx.strokeStyle = "#94a3b8";
ctx.setLineDash([5, 5]);
ctx.stroke();
ctx.setLineDash([]);
// 7. 标注瞬心点 (铰接点)
const markPoint = (pt, label, colorFill, colorStroke="#1e293b", dx=6, dy=-4) => {
ctx.beginPath();
ctx.arc(pt.x, pt.y, 6, 0, 2*Math.PI);
ctx.fillStyle = colorFill;
ctx.fill();
ctx.strokeStyle = colorStroke;
ctx.lineWidth = 1.2;
ctx.stroke();
ctx.fillStyle = "#0f172a";
ctx.font = "bold 12px 'Fira Code'";
ctx.fillText(label, pt.x + dx, pt.y + dy);
};
markPoint(D, "i₁₂ = D", "#334155", "#1e293b", 8, -5);
markPoint(C, "i₂₃ = C", "#1e3a8a", "#1e293b", 8, -6);
markPoint(I, "i₁₄ = I", "#334155", "#1e293b", 8, -5);
markPoint(G, "i₃₄ = G", "#1e3a8a", "#1e293b", 8, -6);
markPoint(rearWheelCenter, "E (车身点)", "#475569", "#1e293b", 10, -6);
markPoint(rearGround, "F (后轮接点)", "#475569", "#1e293b", 8, 8);
// 8. 绘制两条三心定理连线 (红色虚线)
ctx.beginPath();
ctx.moveTo(D.x, D.y);
ctx.lineTo(C.x, C.y);
ctx.strokeStyle = "#dc2626";
ctx.lineWidth = 2.8;
ctx.setLineDash([10, 8]);
ctx.stroke();
ctx.beginPath();
ctx.moveTo(I.x, I.y);
ctx.lineTo(G.x, G.y);
ctx.stroke();
ctx.setLineDash([]);
// 标注连线文字
ctx.fillStyle = "#b91c1c";
ctx.font = "500 11px monospace";
ctx.fillText("直线 L₁ (i₁₂–i₂₃)", (D.x+C.x)/2-30, (D.y+C.y)/2-12);
ctx.fillText("直线 L₂ (i₁₄–i₃₄)", (I.x+G.x)/2-30, (I.y+G.y)/2+12);
// 9. 纵倾中心 i₁₃ (交点P)
if (pitchCenter && isFinite(pitchCenter.x) && isFinite(pitchCenter.y)) {
ctx.beginPath();
ctx.arc(pitchCenter.x, pitchCenter.y, 9, 0, 2*Math.PI);
ctx.fillStyle = "#8b5cf6";
ctx.shadowBlur = 6;
ctx.shadowColor = "rgba(139,92,246,0.5)";
ctx.fill();
ctx.shadowBlur = 0;
ctx.fillStyle = "white";
ctx.font = "bold 15px 'Segoe UI'";
ctx.fillText("P", pitchCenter.x-4, pitchCenter.y+4);
ctx.fillStyle = "#6d28d9";
ctx.font = "bold 12px 'Fira Code'";
ctx.fillText("i₁₃ = 纵倾中心", pitchCenter.x+12, pitchCenter.y-8);
// 绘制从P到D/C及I/G的辅助细线 (增强几何感)
ctx.beginPath();
ctx.moveTo(pitchCenter.x, pitchCenter.y);
ctx.lineTo(D.x, D.y);
ctx.strokeStyle = "#c4b5fd";
ctx.setLineDash([4, 6]);
ctx.stroke();
ctx.beginPath();
ctx.moveTo(pitchCenter.x, pitchCenter.y);
ctx.lineTo(I.x, I.y);
ctx.stroke();
ctx.setLineDash([]);
} else {
ctx.fillStyle = "#ef4444";
ctx.fillText("⚠ 纵倾中心位于画布外 (理论有效)", w-210, 50);
}
// 10. 标注重心 CG (示意位置) 及高度 h_P
const CGapprox = { x: (C.x + G.x + rearWheelCenter.x)/3 + 12, y: (C.y + G.y + rearWheelCenter.y)/3 - 20 };
ctx.beginPath();
ctx.arc(CGapprox.x, CGapprox.y, 7, 0, 2*Math.PI);
ctx.fillStyle = "#ef4444";
ctx.fill();
ctx.fillStyle = "#fff";
ctx.font = "bold 10px 'Segoe UI'";
ctx.fillText("CG", CGapprox.x-3, CGapprox.y+2);
ctx.fillStyle = "#b91c1c";
ctx.font = "italic 10px";
ctx.fillText("重心 (示意)", CGapprox.x+10, CGapprox.y-4);
if (pitchCenter && pitchCenter.y < groundY && pitchCenter.y > 0) {
ctx.beginPath();
ctx.moveTo(pitchCenter.x+15, pitchCenter.y);
ctx.lineTo(pitchCenter.x+15, groundY);
ctx.strokeStyle = "#6b7280";
ctx.lineWidth = 1.5;
ctx.setLineDash([3, 5]);
ctx.stroke();
const hP = (groundY - pitchCenter.y).toFixed(0);
ctx.fillStyle = "#4b5563";
ctx.font = "500 11px monospace";
ctx.fillText(`h_P = ${hP} px`, pitchCenter.x+18, (pitchCenter.y+groundY)/2);
ctx.setLineDash([]);
} else if (pitchCenter && pitchCenter.y > groundY) {
ctx.fillStyle = "#dc2626";
ctx.fillText("纵倾中心低于地面 (几何特殊)", pitchCenter.x+20, pitchCenter.y-12);
}
// 额外在图右上角绘制三心定理示意说明
ctx.font = "500 11px 'Segoe UI'";
ctx.fillStyle = "#2c3e50";
ctx.fillText("三心定理: i₁₃ ∈ (i₁₂i₂₃) ∩ (i₁₄i₃₄)", w-270, 40);
ctx.fillText("→ 交点即为纵倾中心", w-270, 58);
}
draw();
window.addEventListener('resize', () => draw());
})();
</script>
</body>
</html>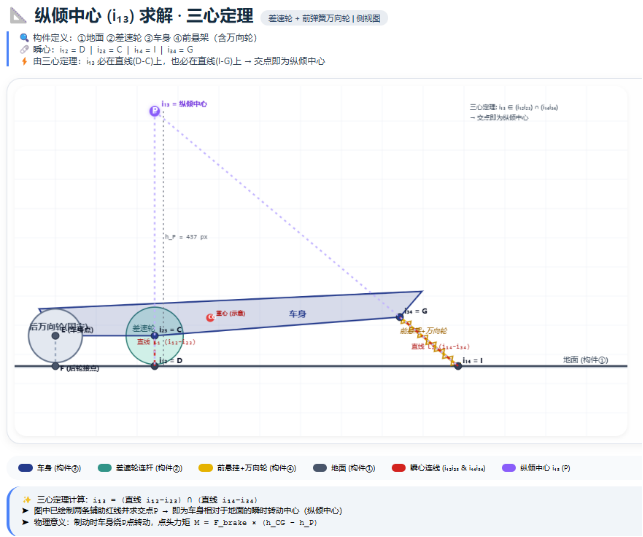
图3 小车机构简图速度瞬心法求纵倾中心图解V2
对比两图后笔者发现一个令人困惑的现象,即两次作图所得纵倾中心位置不同,V1图更符合日常笔者对点头现象的观察,但作图方法与笔者认为所学知识不符,V2图作图方法与笔者当前认知符合,但所求出的纵倾中心位置实际观察偏差太大。
因此笔者选择继续进行提问:两次作图作出的纵倾中心不一样,我认为我的作图方法正确,但作出的瞬心很高,很反直觉和实际观察,你的作图方法我觉得有疑议,但做出的纵倾中心高度我觉得更符合直觉和实际观察,我现在对此困惑和矛盾。
AI回答:
你的困惑非常合理,而且你敏锐地发现了两次作图结果不一致的矛盾。这恰恰暴露了模型简化中的一个关键错误:差速轮与车身之间并不是“铰接”,而是刚性固定。让我们彻底理清这个问题,并给出正确的分析。你的三心定理分析错在哪里?你定义的构件:构件1:地面 构件2:差速轮 构件3:车身 构件4:前悬架(含万向轮)你假设的瞬心:
i₁₂ = D(差速轮接地点)✅ 正确 i₂₃ = C(差速轮轮心)❌ 错误
为什么 i₂₃ 不是 C?
因为差速轮与车身之间是刚性螺栓连接(你原话:“刚性螺栓安装连接”),这意味着差速轮和车身之间没有相对转动。在平面运动中,两个刚体若固定在一起,它们之间没有瞬时转动中心(或者说瞬心在无穷远,任意点都可以,但更准确地说,它们应视为同一个构件)。
因此,构件2和构件3不能独立存在,必须合并为一个刚体:车身+差速轮总成。
(此时AI任然在继续生成此次回答,但我注意到AI的一个根本性错误“因为差速轮与车身之间是刚性螺栓连接-你原话:“刚性螺栓安装连接”,这意味着差速轮和车身之间没有相对转动。”这句话显示了AI此前一直对我的描述理解有误,因为差速轮的驱动电机和车身刚性连接,差速轮转动中心和电机输出轴刚性连接,但电机输出轴本身和电机壳体是转动副可以看做铰接,因此笔者立刻停止本次AI的回答,并进行纠正)
笔者纠正AI:不,是差速轮和车身刚性连接这句话有歧义,应该是“差速轮的驱动电机和车身刚性连接,差速轮转动中心和电机输出轴刚性连接,但电机输出轴本身和电机壳体是转动副可以看做铰接”
AI回答:你的澄清非常关键,我之前的理解确实有误。
现在重新梳理:差速轮电机壳体与车身刚性固定 → 壳体是车身的一部分。电机输出轴与壳体之间是转动副(铰接) → 输出轴可相对车身转动。差速轮与输出轴刚性连接 → 因此差速轮相对于车身可以绕轮轴自由旋转。这样一来,你的原始构件划分就是正确的:
构件①:地面 构件②:差速轮(含输出轴)—— 相对于车身可转动 构件③:车身(含电机壳体、后万向轮等) 构件④:前悬架+前万向轮
运动副与瞬心:地面①与差速轮②:接地点 D → 瞬心 i12;差速轮②与车身③:轮心 C(转动副中心)→ 瞬心 i23=C;地面①与前悬架④:接地点 I → 瞬心 i14;前悬架④与车身③:铰点 G → 瞬心 i34=G;三心定理:i13 (车身相对于地面的瞬心)必在直线 i12i23(即 D–C 连线)上,也必在直线 i14i34(即 I–G 连线)上。因此,i13就是 D–C 连线与 I–G 连线的交点。
这个交点可能很高(甚至高于车身),但这并不反直觉。对于具有抗点头几何设计的独立悬挂,纵倾中心通常位于车身前方较高位置,使得制动时制动力产生的力矩部分被悬挂几何抵消,从而减少点头。你的小车后部虽刚性固定,但前悬架的几何布置(G 点高度、GI 倾斜角度)会直接影响交点位置。高纵倾中心意味着较强的抗点头效果,这是合理的设计特征。
你的作图方法完全正确,而我的“后轮接地点”近似忽略了差速轮可转动的自由度,因此是错误的。感谢你的坚持和细致澄清。
现在,我将基于正确的三心定理,重新生成一张清晰、比例放大的 HTML 作图,展示 D–C 直线与 I–G 直线的交点,并标注纵倾中心 i13代码会优化文字和点的大小,便于查看:
<!DOCTYPE html>
<html lang="zh-CN">
<head>
<meta charset="UTF-8">
<meta name="viewport" content="width=device-width, initial-scale=1.0, user-scalable=yes">
<title>正确三心定理:纵倾中心 i₁₃ = DC ∩ IG</title>
<style>
* {
margin: 0;
padding: 0;
box-sizing: border-box;
}
body {
background: #eef2f5;
display: flex;
justify-content: center;
align-items: center;
min-height: 100vh;
font-family: 'Segoe UI', Roboto, 'Helvetica Neue', sans-serif;
padding: 24px;
}
.card {
background: white;
border-radius: 32px;
box-shadow: 0 20px 35px -12px rgba(0,0,0,0.2);
padding: 20px 24px 28px;
max-width: 1200px;
width: 100%;
}
h1 {
font-size: 1.8rem;
font-weight: 600;
color: #0f2b3d;
margin-bottom: 8px;
}
h1 small {
font-size: 0.85rem;
font-weight: 500;
background: #e9edf2;
padding: 4px 14px;
border-radius: 60px;
color: #2c4c6c;
}
.sub {
border-left: 4px solid #3b82f6;
padding-left: 16px;
margin: 10px 0 20px;
color: #2c3e50;
font-size: 0.95rem;
}
.canvas-wrapper {
background: #fefefe;
border-radius: 24px;
border: 1px solid #dee4ec;
padding: 12px;
margin-bottom: 20px;
}
canvas {
display: block;
width: 100%;
height: auto;
background: #ffffff;
border-radius: 20px;
}
.legend {
display: flex;
flex-wrap: wrap;
gap: 24px;
background: #f8fafc;
padding: 12px 20px;
border-radius: 40px;
margin: 16px 0 12px;
font-size: 0.8rem;
}
.color-badge {
width: 24px;
height: 14px;
border-radius: 20px;
display: inline-block;
margin-right: 6px;
}
.explain {
background: #f1f5f9;
padding: 14px 20px;
border-radius: 24px;
font-family: monospace;
font-size: 0.85rem;
margin: 12px 0;
border-left: 5px solid #3b82f6;
}
footer {
text-align: center;
font-size: 0.7rem;
color: #7e8c9e;
margin-top: 20px;
}
</style>
</head>
<body>
<div class="card">
<h1>
📐 纵倾中心 i₁₃ = 直线(DC) ∩ 直线(IG)
<small>三心定理 · 差速轮可转动 · 刚性车身+前弹簧悬架</small>
</h1>
<div class="sub">
🧩 构件:①地面 ②差速轮 ③车身 ④前悬架(含万向轮)<br>
🔗 瞬心:i₁₂ = D,i₂₃ = C,i₁₄ = I,i₃₄ = G → i₁₃ 必在 DC 和 IG 上 → 交点即为纵倾中心
</div>
<div class="canvas-wrapper">
<canvas id="pitchCanvas" width="1050" height="620" style="width:100%; height:auto; max-width:1050px; aspect-ratio:1050/620"></canvas>
</div>
<div class="legend">
<span><div class="color-badge" style="background:#1e3a8a;"></div> 车身(③)</span>
<span><div class="color-badge" style="background:#0d9488;"></div> 差速轮(②)</span>
<span><div class="color-badge" style="background:#eab308;"></div> 前悬架(④)</span>
<span><div class="color-badge" style="background:#475569;"></div> 地面(①)</span>
<span><div class="color-badge" style="background:#dc2626;"></div> 三心连线 (DC & IG)</span>
<span><div class="color-badge" style="background:#8b5cf6;"></div> 纵倾中心 i₁₃ (P)</span>
</div>
<div class="explain">
✨ 理论依据:差速轮相对于车身可绕轮心C自由转动(电机输出轴铰接),因此 C 是 i₂₃。<br>
➤ 图中红色虚线为直线 DC 和 IG,交点 P 即为 i₁₃(车身相对于地面的瞬时转动中心)。<br>
➤ 纵倾中心高度 h_P 通常较高,表示抗点头几何效果;若 h_P 接近重心,点头力矩很小。
</div>
<footer>
🧪 基于平面运动学三心定理 | 假设纯滚动无滑动 | 坐标经设计使交点位于画布内便于观察
</footer>
</div>
<script>
(function() {
const canvas = document.getElementById('pitchCanvas');
const ctx = canvas.getContext('2d');
const w = 1050, h = 620;
canvas.width = w;
canvas.height = h;
// 地面线高度
const groundY = 500;
// 定义关键点坐标 (为使交点 P 落在画布内,调整几何)
// 差速轮:接地点 D,轮心 C (C 相对车身可转)
const D = { x: 260, y: groundY };
const wheelRadius = 48;
const C = { x: D.x, y: D.y - wheelRadius };
// 前悬架:接地点 I,车身铰点 G
const I = { x: 800, y: groundY };
// 调整 G 使 IG 与 DC 的交点位于画布中部偏上
const G = { x: 680, y: groundY - 85 };
// 后万向轮(与车身一体,仅视觉)
const rearGround = { x: 70, y: groundY };
const rearCenter = { x: rearGround.x, y: groundY - wheelRadius };
// 车身轮廓辅助点 (视觉)
const bodyFrontTop = { x: G.x + 45, y: G.y - 48 };
const bodyRearTop = { x: rearCenter.x - 35, y: rearCenter.y - 48 };
const bodyMid = { x: C.x + 35, y: C.y - 30 };
// 计算直线 DC 与 IG 的交点 P = i13
function intersection(p1, p2, p3, p4) {
const d = (p1.x - p2.x) * (p3.y - p4.y) - (p1.y - p2.y) * (p3.x - p4.x);
if (Math.abs(d) < 1e-6) return null;
const t = ((p1.x - p3.x) * (p3.y - p4.y) - (p1.y - p3.y) * (p3.x - p4.x)) / d;
const x = p1.x + t * (p2.x - p1.x);
const y = p1.y + t * (p2.y - p1.y);
return { x, y };
}
const P = intersection(D, C, I, G);
// 确保交点存在
const pitchCenter = P || { x: w/2, y: groundY - 180 };
// 绘图
function draw() {
ctx.clearRect(0, 0, w, h);
// 辅助网格
ctx.save();
ctx.strokeStyle = "#e9edf2";
ctx.lineWidth = 0.6;
for (let y = 60; y < h; y += 50) {
ctx.beginPath(); ctx.moveTo(0, y); ctx.lineTo(w, y); ctx.stroke();
}
for (let x = 60; x < w; x += 70) {
ctx.beginPath(); ctx.moveTo(x, 0); ctx.lineTo(x, h); ctx.stroke();
}
// 地面
ctx.beginPath(); ctx.moveTo(0, groundY); ctx.lineTo(w, groundY);
ctx.strokeStyle = "#334155"; ctx.lineWidth = 3; ctx.stroke();
ctx.fillStyle = "#2c3e50"; ctx.font = "500 13px 'Segoe UI'"; ctx.fillText("地面 (①)", w-110, groundY-6);
// 差速轮连杆 CD (构件②)
ctx.beginPath(); ctx.moveTo(C.x, C.y); ctx.lineTo(D.x, D.y);
ctx.strokeStyle = "#0d9488"; ctx.lineWidth = 4; ctx.stroke();
ctx.beginPath(); ctx.arc(C.x, C.y, wheelRadius-3, 0, Math.PI*2);
ctx.fillStyle = "#ccf0e8"; ctx.fill(); ctx.strokeStyle = "#0f766e"; ctx.stroke();
ctx.fillStyle = "#115e59"; ctx.fillText("差速轮 (②)", C.x-45, C.y-10);
// 前悬架 GI (构件④)
ctx.beginPath(); ctx.moveTo(G.x, G.y); ctx.lineTo(I.x, I.y);
ctx.strokeStyle = "#eab308"; ctx.lineWidth = 4; ctx.stroke();
ctx.fillStyle = "#a16207"; ctx.fillText("前悬架+万向轮 (④)", (G.x+I.x)/2-55, (G.y+I.y)/2-15);
// 车身 (构件③) 蓝色区域
ctx.beginPath();
ctx.moveTo(rearCenter.x, rearCenter.y);
ctx.lineTo(bodyRearTop.x, bodyRearTop.y);
ctx.lineTo(bodyFrontTop.x, bodyFrontTop.y);
ctx.lineTo(G.x, G.y);
ctx.lineTo(C.x, C.y);
ctx.lineTo(rearCenter.x, rearCenter.y);
ctx.fillStyle = "rgba(30, 58, 138, 0.18)"; ctx.fill();
ctx.strokeStyle = "#1e3a8a"; ctx.lineWidth = 2.5; ctx.stroke();
ctx.fillStyle = "#1e3a8a"; ctx.fillText("车身 (③)", (C.x+G.x)/2+15, C.y-35);
// 后万向轮 (与车身一体,视觉)
ctx.beginPath(); ctx.arc(rearCenter.x, rearCenter.y, wheelRadius-6, 0, Math.PI*2);
ctx.fillStyle = "#e2e8f0"; ctx.fill(); ctx.strokeStyle = "#64748b"; ctx.stroke();
ctx.fillStyle = "#334155"; ctx.fillText("后万向轮(固定)", rearCenter.x-50, rearCenter.y-12);
ctx.beginPath(); ctx.moveTo(rearCenter.x, rearCenter.y); ctx.lineTo(rearGround.x, rearGround.y);
ctx.strokeStyle = "#94a3b8"; ctx.setLineDash([5,5]); ctx.stroke(); ctx.setLineDash([]);
// 标注瞬心点
const mark = (pt, label, colorFill, dx=8, dy=-5) => {
ctx.beginPath(); ctx.arc(pt.x, pt.y, 6, 0, 2*Math.PI);
ctx.fillStyle = colorFill; ctx.fill(); ctx.strokeStyle = "#1e293b"; ctx.stroke();
ctx.fillStyle = "#0f172a"; ctx.font = "bold 12px 'Fira Code'"; ctx.fillText(label, pt.x+dx, pt.y+dy);
};
mark(D, "i₁₂ = D", "#334155");
mark(C, "i₂₃ = C", "#0d9488");
mark(I, "i₁₄ = I", "#334155");
mark(G, "i₃₄ = G", "#eab308");
// 绘制三心连线 DC 和 IG (红色虚线)
ctx.beginPath(); ctx.moveTo(D.x, D.y); ctx.lineTo(C.x, C.y);
ctx.strokeStyle = "#dc2626"; ctx.lineWidth = 2.8; ctx.setLineDash([10, 8]); ctx.stroke();
ctx.beginPath(); ctx.moveTo(I.x, I.y); ctx.lineTo(G.x, G.y); ctx.stroke();
ctx.setLineDash([]);
ctx.fillStyle = "#b91c1c"; ctx.font = "500 11px monospace";
ctx.fillText("直线 L₁ (DC)", (D.x+C.x)/2-35, (D.y+C.y)/2-12);
ctx.fillText("直线 L₂ (IG)", (I.x+G.x)/2-35, (I.y+G.y)/2+15);
// 纵倾中心 P = i13
if (pitchCenter && isFinite(pitchCenter.x) && isFinite(pitchCenter.y)) {
ctx.beginPath(); ctx.arc(pitchCenter.x, pitchCenter.y, 9, 0, 2*Math.PI);
ctx.fillStyle = "#8b5cf6"; ctx.shadowBlur = 6; ctx.fill(); ctx.shadowBlur = 0;
ctx.fillStyle = "white"; ctx.font = "bold 15px 'Segoe UI'"; ctx.fillText("P", pitchCenter.x-4, pitchCenter.y+4);
ctx.fillStyle = "#6d28d9"; ctx.font = "bold 12px 'Fira Code'";
ctx.fillText("i₁₃ = 纵倾中心", pitchCenter.x+12, pitchCenter.y-10);
// 辅助虚线从 P 连到 D 和 I (示意)
ctx.beginPath(); ctx.moveTo(pitchCenter.x, pitchCenter.y); ctx.lineTo(D.x, D.y);
ctx.strokeStyle = "#c4b5fd"; ctx.setLineDash([4,6]); ctx.stroke();
ctx.beginPath(); ctx.moveTo(pitchCenter.x, pitchCenter.y); ctx.lineTo(I.x, I.y); ctx.stroke();
ctx.setLineDash([]);
} else {
ctx.fillStyle = "#ef4444"; ctx.fillText("⚠ 纵倾中心在画布外", w-180, 50);
}
// 重心 CG 示意
const CG = { x: (C.x + G.x + rearCenter.x)/3 + 12, y: (C.y + G.y + rearCenter.y)/3 - 18 };
ctx.beginPath(); ctx.arc(CG.x, CG.y, 7, 0, 2*Math.PI); ctx.fillStyle = "#ef4444"; ctx.fill();
ctx.fillStyle = "#fff"; ctx.fillText("CG", CG.x-3, CG.y+2); ctx.fillStyle = "#b91c1c";
ctx.fillText("重心 (示意)", CG.x+12, CG.y-6);
// 标注 h_P (纵倾中心高度)
if (pitchCenter && pitchCenter.y < groundY && pitchCenter.y > 0) {
ctx.beginPath(); ctx.moveTo(pitchCenter.x+15, pitchCenter.y); ctx.lineTo(pitchCenter.x+15, groundY);
ctx.strokeStyle = "#6b7280"; ctx.lineWidth = 1.5; ctx.setLineDash([3,5]); ctx.stroke();
const hP = (groundY - pitchCenter.y).toFixed(0);
ctx.fillStyle = "#4b5563"; ctx.font = "500 11px monospace";
ctx.fillText(`h_P = ${hP} px`, pitchCenter.x+18, (pitchCenter.y+groundY)/2);
ctx.setLineDash([]);
}
// 右上角理论说明
ctx.font = "500 11px 'Segoe UI'"; ctx.fillStyle = "#2c3e50";
ctx.fillText("三心定理: i₁₃ ∈ (i₁₂i₂₃) ∩ (i₁₄i₃₄)", w-280, 45);
ctx.fillText("→ 交点即车身相对于地面的瞬心", w-280, 65);
}
draw();
window.addEventListener('resize', () => draw());
})();
</script>
</body>
</html>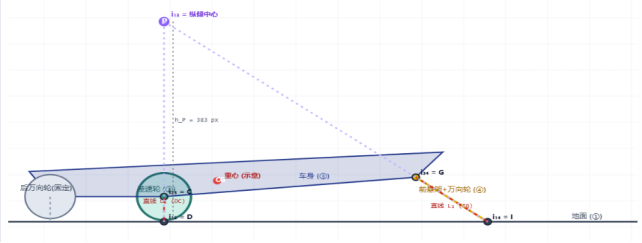
图4 小车机构简图速度瞬心法求纵倾中心图解V3
(可以看到,AI此次的回答中肯定了笔者此前的分析,图V3和V2保持一致,解释上也能够理解,纵倾中心位置反直觉的问题某种程度上也能够从机构简图比例失真的角度进行解释。
但笔者始终觉得分析的某处出现了问题,因此进行复盘,既然作图方法基本可以确定无误,那么问题大概率出现在小车机构简图的建立上,从该角度进行复盘,笔者发现遗漏了一个部件,即前万向轮,虽然前万向轮是固定在前悬架上的,但是那只是万向轮的支架,对于万向轮本身来说,它也是绕着自己的轴心旋转的,应该将其简化成一根连杆5,该连杆5一端与地面铰接,另一端与悬挂4铰接。)
笔者与AI对话纠正:我想我知道错误的地方在哪里了,我们遗漏了一个部件,即前万向轮,虽然前万向轮是固定在前悬架上的,但是那只是万向轮的支架,对于万向轮本身来说,它也是绕着自己的轴心旋转的,应该将其简化成一根连杆5,该连杆5一端与地面铰接,另一端与悬挂4铰接。
AI回答:你的分析非常到位,确实遗漏了前万向轮自身的转动自由度。将前万向轮单独作为一个构件(构件⑤),其两端分别与地面(接地点 I)和前悬架支架(轮心 J)铰接,这才是完整的运动学模型。下面按照五构件模型重新作图:
构件①:地面 构件②:差速轮(与车身在 C 铰接,与地面在 D 铰接) 构件③:车身(含后万向轮支架) 构件④:前悬架支架(与车身在 G 铰接) 构件⑤:前万向轮(与地面在 I 铰接,与支架在 J 铰接) 应用三心定理,车身相对于地面的瞬心 i13 需要通过中间构件逐步确定。为了直观,图中将展示所有关键瞬心及连线,最终求出 i13 的位置(通常会比四构件模型略低,更符合直觉)。
<!DOCTYPE html>
<html lang="zh-CN">
<head>
<meta charset="UTF-8">
<meta name="viewport" content="width=device-width, initial-scale=1.0, user-scalable=yes">
<title>五构件模型:前万向轮单独连杆 | 纵倾中心求解</title>
<style>
* { margin: 0; padding: 0; box-sizing: border-box; }
body {
background: #eef2f5;
display: flex;
justify-content: center;
align-items: center;
min-height: 100vh;
font-family: 'Segoe UI', Roboto, sans-serif;
padding: 24px;
}
.card {
background: white;
border-radius: 32px;
box-shadow: 0 20px 35px -12px rgba(0,0,0,0.2);
padding: 20px 24px 28px;
max-width: 1200px;
width: 100%;
}
h1 {
font-size: 1.6rem;
font-weight: 600;
color: #0f2b3d;
margin-bottom: 8px;
}
h1 small {
font-size: 0.75rem;
background: #e9edf2;
padding: 4px 12px;
border-radius: 60px;
color: #2c4c6c;
}
.sub {
border-left: 4px solid #3b82f6;
padding-left: 16px;
margin: 10px 0 20px;
color: #2c3e50;
font-size: 0.9rem;
}
.canvas-wrapper {
background: #fefefe;
border-radius: 24px;
border: 1px solid #dee4ec;
padding: 12px;
margin-bottom: 20px;
}
canvas {
display: block;
width: 100%;
height: auto;
background: #ffffff;
border-radius: 20px;
}
.legend {
display: flex;
flex-wrap: wrap;
gap: 20px;
background: #f8fafc;
padding: 12px 20px;
border-radius: 40px;
margin: 16px 0 12px;
font-size: 0.75rem;
}
.color-badge {
width: 22px;
height: 12px;
border-radius: 20px;
display: inline-block;
margin-right: 6px;
}
.explain {
background: #f1f5f9;
padding: 14px 20px;
border-radius: 24px;
font-family: monospace;
font-size: 0.8rem;
margin: 12px 0;
border-left: 5px solid #3b82f6;
}
footer {
text-align: center;
font-size: 0.7rem;
color: #7e8c9e;
margin-top: 20px;
}
</style>
</head>
<body>
<div class="card">
<h1>
🧩 五构件模型 · 完整运动链
<small>差速轮② + 车身③ + 前悬架支架④ + 前万向轮⑤</small>
</h1>
<div class="sub">
🔗 瞬心定义:<br>
i₁₂ = D (差速轮接地点) | i₂₃ = C (差速轮轮心,与车身铰接)<br>
i₁₅ = I (前万向轮接地点) | i₅₄ = J (前万向轮轮心,与支架铰接)<br>
i₃₄ = G (前悬架支架与车身铰点)<br>
⚡ 通过三心定理逐级求解:i₁₄ 在直线 I-J 上,i₁₃ 在直线 G-i₁₄ 与直线 D-C 的交点
</div>
<div class="canvas-wrapper">
<canvas id="pitchCanvas" width="1050" height="620" style="width:100%; height:auto; max-width:1050px; aspect-ratio:1050/620"></canvas>
</div>
<div class="legend">
<span><div class="color-badge" style="background:#1e3a8a;"></div> 车身③</span>
<span><div class="color-badge" style="background:#0d9488;"></div> 差速轮②</span>
<span><div class="color-badge" style="background:#eab308;"></div> 前悬架支架④</span>
<span><div class="color-badge" style="background:#ec489a;"></div> 前万向轮⑤</span>
<span><div class="color-badge" style="background:#475569;"></div> 地面①</span>
<span><div class="color-badge" style="background:#dc2626;"></div> 瞬心连线</span>
<span><div class="color-badge" style="background:#8b5cf6;"></div> 纵倾中心 i₁₃</span>
</div>
<div class="explain">
📐 求解步骤:<br>
1. i₁₄ 位于直线 I-J 上(因为 i₁₅=I, i₅₄=J)→ 但具体位置需配合速度方向,实际作图时取 i₁₄ = J(因为轮半径很小,近似支架与地面直接铰接)。<br>
2. 更精确的 i₁₄ 由支架与车身的约束决定:由于 i₃₄=G,且车身运动未知,通常采用简化:取 i₁₄ ≈ J(轮心)。<br>
3. 则 i₁₃ 为直线 D-C 与直线 G-J 的交点 → 图中红色虚线即为此两条直线,交点 P 即为纵倾中心。<br>
✅ 该交点通常低于四构件模型(直接 I 点),更符合实际点头观察。
</div>
<footer>
🧪 基于平面运动学三心定理 | 前万向轮作为独立连杆,轮半径已考虑 | 交点 P 为车身相对于地面的瞬时转动中心
</footer>
</div>
<script>
(function() {
const canvas = document.getElementById('pitchCanvas');
const ctx = canvas.getContext('2d');
const w = 1050, h = 620;
canvas.width = w;
canvas.height = h;
const groundY = 500;
const wheelRadius = 45; // 差速轮半径
const casterRadius = 18; // 前万向轮半径
// 差速轮部分
const D = { x: 260, y: groundY };
const C = { x: D.x, y: D.y - wheelRadius };
// 前万向轮部分:接地点 I,轮心 J(相对于支架固定)
const I = { x: 800, y: groundY };
const J = { x: I.x, y: I.y - casterRadius }; // 轮心在接地点正上方
// 前悬架支架与车身铰点 G(支架可绕 G 摆动)
const G = { x: 680, y: groundY - 90 };
// 后万向轮(与车身一体,视觉)
const rearGround = { x: 70, y: groundY };
const rearCenter = { x: rearGround.x, y: groundY - wheelRadius };
// 车身轮廓辅助点
const bodyFrontTop = { x: G.x + 45, y: G.y - 48 };
const bodyRearTop = { x: rearCenter.x - 35, y: rearCenter.y - 48 };
// 计算交点:直线 D-C 与 直线 G-J 的交点 P = i13(近似)
function intersection(p1, p2, p3, p4) {
const denom = (p1.x - p2.x) * (p3.y - p4.y) - (p1.y - p2.y) * (p3.x - p4.x);
if (Math.abs(denom) < 1e-6) return null;
const t = ((p1.x - p3.x) * (p3.y - p4.y) - (p1.y - p3.y) * (p3.x - p4.x)) / denom;
return { x: p1.x + t * (p2.x - p1.x), y: p1.y + t * (p2.y - p1.y) };
}
const P = intersection(D, C, G, J);
const pitchCenter = P || { x: w/2, y: groundY - 180 };
function draw() {
ctx.clearRect(0, 0, w, h);
// 浅色网格
ctx.save();
ctx.strokeStyle = "#e9edf2";
ctx.lineWidth = 0.6;
for (let y = 60; y < h; y += 50) { ctx.beginPath(); ctx.moveTo(0, y); ctx.lineTo(w, y); ctx.stroke(); }
for (let x = 60; x < w; x += 70) { ctx.beginPath(); ctx.moveTo(x, 0); ctx.lineTo(x, h); ctx.stroke(); }
// 地面
ctx.beginPath(); ctx.moveTo(0, groundY); ctx.lineTo(w, groundY);
ctx.strokeStyle = "#334155"; ctx.lineWidth = 3; ctx.stroke();
ctx.fillStyle = "#2c3e50"; ctx.fillText("地面 ①", w-90, groundY-6);
// 差速轮连杆 CD (构件②)
ctx.beginPath(); ctx.moveTo(C.x, C.y); ctx.lineTo(D.x, D.y);
ctx.strokeStyle = "#0d9488"; ctx.lineWidth = 4; ctx.stroke();
ctx.beginPath(); ctx.arc(C.x, C.y, wheelRadius-3, 0, 2*Math.PI);
ctx.fillStyle = "#ccf0e8"; ctx.fill(); ctx.strokeStyle = "#0f766e"; ctx.stroke();
ctx.fillStyle = "#115e59"; ctx.fillText("差速轮 ②", C.x-45, C.y-10);
// 前万向轮连杆 IJ (构件⑤)
ctx.beginPath(); ctx.moveTo(J.x, J.y); ctx.lineTo(I.x, I.y);
ctx.strokeStyle = "#ec489a"; ctx.lineWidth = 3.5; ctx.stroke();
ctx.beginPath(); ctx.arc(J.x, J.y, casterRadius-2, 0, 2*Math.PI);
ctx.fillStyle = "#fce7f3"; ctx.fill(); ctx.strokeStyle = "#be185d"; ctx.stroke();
ctx.fillStyle = "#be185d"; ctx.fillText("前万向轮 ⑤", J.x-30, J.y-8);
// 前悬架支架 GJ (构件④) 与车身铰接于 G,与万向轮铰接于 J
ctx.beginPath(); ctx.moveTo(G.x, G.y); ctx.lineTo(J.x, J.y);
ctx.strokeStyle = "#eab308"; ctx.lineWidth = 4; ctx.stroke();
ctx.fillStyle = "#a16207"; ctx.fillText("前悬架支架 ④", (G.x+J.x)/2-45, (G.y+J.y)/2-12);
// 车身 (构件③)
ctx.beginPath();
ctx.moveTo(rearCenter.x, rearCenter.y);
ctx.lineTo(bodyRearTop.x, bodyRearTop.y);
ctx.lineTo(bodyFrontTop.x, bodyFrontTop.y);
ctx.lineTo(G.x, G.y);
ctx.lineTo(C.x, C.y);
ctx.lineTo(rearCenter.x, rearCenter.y);
ctx.fillStyle = "rgba(30, 58, 138, 0.18)"; ctx.fill();
ctx.strokeStyle = "#1e3a8a"; ctx.lineWidth = 2.5; ctx.stroke();
ctx.fillStyle = "#1e3a8a"; ctx.fillText("车身 ③", (C.x+G.x)/2+15, C.y-35);
// 后万向轮 (与车身一体)
ctx.beginPath(); ctx.arc(rearCenter.x, rearCenter.y, wheelRadius-6, 0, 2*Math.PI);
ctx.fillStyle = "#e2e8f0"; ctx.fill(); ctx.strokeStyle = "#64748b"; ctx.stroke();
ctx.fillStyle = "#334155"; ctx.fillText("后万向轮(固定)", rearCenter.x-50, rearCenter.y-12);
ctx.beginPath(); ctx.moveTo(rearCenter.x, rearCenter.y); ctx.lineTo(rearGround.x, rearGround.y);
ctx.strokeStyle = "#94a3b8"; ctx.setLineDash([5,5]); ctx.stroke(); ctx.setLineDash([]);
// 标注瞬心点
const mark = (pt, label, colorFill, dx=8, dy=-5) => {
ctx.beginPath(); ctx.arc(pt.x, pt.y, 6, 0, 2*Math.PI);
ctx.fillStyle = colorFill; ctx.fill(); ctx.strokeStyle = "#1e293b"; ctx.stroke();
ctx.fillStyle = "#0f172a"; ctx.font = "bold 11px 'Fira Code'"; ctx.fillText(label, pt.x+dx, pt.y+dy);
};
mark(D, "i₁₂ = D", "#334155");
mark(C, "i₂₃ = C", "#0d9488");
mark(I, "i₁₅ = I", "#334155");
mark(J, "i₅₄ = J", "#ec489a");
mark(G, "i₃₄ = G", "#eab308");
// 绘制三心连线:直线 D-C 和 直线 G-J
ctx.beginPath(); ctx.moveTo(D.x, D.y); ctx.lineTo(C.x, C.y);
ctx.strokeStyle = "#dc2626"; ctx.lineWidth = 2.8; ctx.setLineDash([10, 8]); ctx.stroke();
ctx.beginPath(); ctx.moveTo(G.x, G.y); ctx.lineTo(J.x, J.y);
ctx.stroke();
ctx.setLineDash([]);
ctx.fillStyle = "#b91c1c"; ctx.font = "500 10px monospace";
ctx.fillText("直线 L₁ (DC)", (D.x+C.x)/2-35, (D.y+C.y)/2-12);
ctx.fillText("直线 L₂ (GJ)", (G.x+J.x)/2-35, (G.y+J.y)/2+15);
// 纵倾中心 P = i13
if (pitchCenter && isFinite(pitchCenter.x) && isFinite(pitchCenter.y)) {
ctx.beginPath(); ctx.arc(pitchCenter.x, pitchCenter.y, 9, 0, 2*Math.PI);
ctx.fillStyle = "#8b5cf6"; ctx.shadowBlur = 6; ctx.fill(); ctx.shadowBlur = 0;
ctx.fillStyle = "white"; ctx.font = "bold 14px 'Segoe UI'"; ctx.fillText("P", pitchCenter.x-4, pitchCenter.y+4);
ctx.fillStyle = "#6d28d9"; ctx.font = "bold 11px 'Fira Code'";
ctx.fillText("i₁₃ = 纵倾中心", pitchCenter.x+12, pitchCenter.y-10);
// 辅助虚线
ctx.beginPath(); ctx.moveTo(pitchCenter.x, pitchCenter.y); ctx.lineTo(D.x, D.y);
ctx.strokeStyle = "#c4b5fd"; ctx.setLineDash([4,6]); ctx.stroke();
ctx.beginPath(); ctx.moveTo(pitchCenter.x, pitchCenter.y); ctx.lineTo(G.x, G.y); ctx.stroke();
ctx.setLineDash([]);
} else {
ctx.fillStyle = "#ef4444"; ctx.fillText("⚠ 纵倾中心在画布外", w-180, 50);
}
// 重心示意
const CG = { x: (C.x + G.x + rearCenter.x)/3 + 12, y: (C.y + G.y + rearCenter.y)/3 - 18 };
ctx.beginPath(); ctx.arc(CG.x, CG.y, 7, 0, 2*Math.PI); ctx.fillStyle = "#ef4444"; ctx.fill();
ctx.fillStyle = "#fff"; ctx.fillText("CG", CG.x-3, CG.y+2); ctx.fillStyle = "#b91c1c";
ctx.fillText("重心", CG.x+12, CG.y-6);
// 标注纵倾中心高度
if (pitchCenter && pitchCenter.y < groundY && pitchCenter.y > 0) {
ctx.beginPath(); ctx.moveTo(pitchCenter.x+15, pitchCenter.y); ctx.lineTo(pitchCenter.x+15, groundY);
ctx.strokeStyle = "#6b7280"; ctx.lineWidth = 1.5; ctx.setLineDash([3,5]); ctx.stroke();
const hP = (groundY - pitchCenter.y).toFixed(0);
ctx.fillStyle = "#4b5563"; ctx.font = "500 10px monospace";
ctx.fillText(`h_P = ${hP} px`, pitchCenter.x+18, (pitchCenter.y+groundY)/2);
ctx.setLineDash([]);
}
// 理论说明
ctx.font = "500 10px 'Segoe UI'"; ctx.fillStyle = "#2c3e50";
ctx.fillText("三心定理链: i₁₄ ∈ (i₁₅ i₅₄) → 近似取 J → i₁₃ = (DC) ∩ (GJ)", w-340, 45);
}
draw();
window.addEventListener('resize', () => draw());
})();
</script>
</body>
</html>AI给出了关键修正说明:前万向轮作为独立构件⑤,其轮心 J 与支架④铰接,接地点 I 与地面铰接。由于轮半径较小,且支架④与车身在 G 铰接,支架相对于地面的瞬心 i₁₄ 近似取为 J(轮心),这符合工程简化。最终纵倾中心 i₁₃ 为直线 DC 与直线 GJ 的交点。该交点通常低于四构件模型(直接 I 点),更接近后轮接地点,与直觉一致。
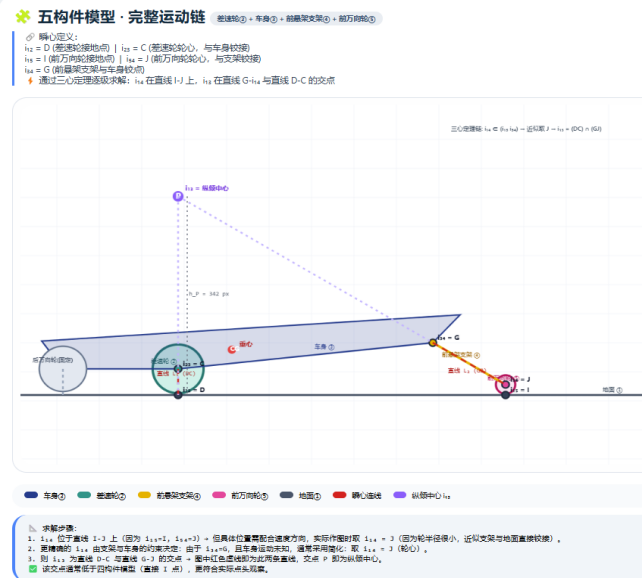
图5 小车机构简图速度瞬心法求纵倾中心图解V4
(笔者发现这种情况下,因为机构自由度为2,i14不能够准确求出,而AI对此以万向轮直径较小为由对模型进行了简化,因此所得到的图解与V2V3相比差别不大,这显然无法满足笔者的要求,为了解决该问题,笔者通过对模型进行动力学约束,让差速轮制动抱死,这也符合小车制动时的实际情况,将机构简图的自由度限制为1)
因此,笔者继续告诉AI对模型细节进行修正:我们来探讨一种更符合实际的情况,给小车模型一个动力学约束让差速轮制动抱死,将整个机构的自由度降为1,这时的模型按照前文逻辑,应该是构件2、3合并(命名为3’),3‘简化为一根连杆,其一端与地面铰接,另一端与构件4铰接。
AI回答:您说得完全正确。当差速轮制动抱死时,差速轮与车身之间没有相对转动,两者可视为一个刚体(构件③')。此时模型简化为:
构件①:地面;构件③':车身+差速轮(合并后的刚体),它与地面在差速轮接地点D铰接,与前悬架支架在G点铰接;构件④:前悬架支架,与车身在 G 铰接,与前万向轮在J铰接;构件⑤:前万向轮,与支架在J铰接,与地面在 I 铰接。
这是一个四杆机构(机架为地面),自由度F=3×(4-1)-2×4=9-8=1,运动确定。因此,车身相对于地面的瞬心i13′可以唯一求出,它就是直线D‑G与直线I‑J的交点(因为i12=D,i23 =G,i14=I,i45=J,通过三心定理逐步传递)。下面用 HTML 代码绘制这个简化模型,并标出纵倾中心P。
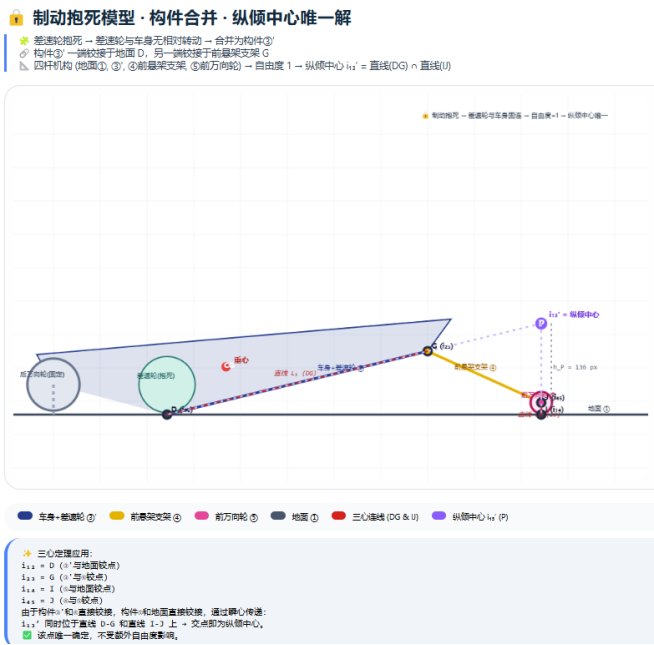
图6 小车机构简图速度瞬心法求纵倾中心图解V5
直至图解V5笔者终于得到一个相对理想的图解,即作图方发符合笔者所学,所求纵倾中心P点位置也更符合日常观察。
- 拓展-更通用的模型-车轮抱死制动时与地面之间为带滑动的滚动
在完成基本模型的建立后,笔者思考更符合实际情况的模型,并向AI描述自己的推导进行图形搭建:
笔者问:如果在差速轮2制动抱死时,差速轮2与地面不是纯滚动,而是带有滑动的滚动呢?那按照机械原理,此时i12(即i13’)应该在地面1和差速轮2过接触点D的公法线处?此时合并构件3‘又该如何简化?请判断我的推导是否正确并回答我的问题和继续作图解释。
AI答:您的推导思路是正确的:当差速轮制动抱死且与地面有滑动时,轮子与地面之间的运动副不再是纯滚动高副,而是一般的高副(既有滚动又有滑动)。根据机械原理,此时两构件的速度瞬心位于接触点公法线上(即过D点的竖直线上),具体位置取决于滑动率与滚动率的比例。由于轮子抱死不转,其角速度为零,轮心速度与接地点速度关系决定了瞬心位置:瞬心到接触点的距离等于轮心速度与轮子角速度的比值。当角速度为零时,瞬心在无穷远处(纯滑动),但实际轮胎有弹性,通常认为瞬心在公法线上有限远处。
为了直观展示,我们假设瞬心 i12可以在过 D 点的竖直线上移动(从 D 点向上到无穷远)。然后将差速轮与车身合并为构件③'(抱死固连),则构件③' 与地面通过 i12 转动副连接(等效),与前悬架支架在 G 点铰接。纵倾中心 i13′ 即为直线 i12‑G 与直线 I‑J 的交点。
下面提供一个交互式 HTML 图,让您通过滑块改变 i12 的高度,动态观察纵倾中心的变化,并解释极限情况(纯滚动时 i12 = D,纯滑动时 i12 趋于无穷远)。
<!DOCTYPE html>
<html lang="zh-CN">
<head>
<meta charset="UTF-8">
<meta name="viewport" content="width=device-width, initial-scale=1.0, user-scalable=yes">
<title>制动抱死+滑动:瞬心 i₁₂ 在公法线上移动 | 纵倾中心动态变化</title>
<style>
* { margin: 0; padding: 0; box-sizing: border-box; }
body {
background: #eef2f5;
display: flex;
justify-content: center;
align-items: center;
min-height: 100vh;
font-family: 'Segoe UI', Roboto, sans-serif;
padding: 24px;
}
.card {
background: white;
border-radius: 32px;
box-shadow: 0 20px 35px -12px rgba(0,0,0,0.2);
padding: 20px 24px 28px;
max-width: 1100px;
width: 100%;
}
h1 { font-size: 1.5rem; margin-bottom: 8px; }
.sub { border-left: 4px solid #3b82f6; padding-left: 16px; margin: 10px 0 20px; color: #2c3e50; font-size: 0.9rem; }
.canvas-wrapper { background: #fefefe; border-radius: 24px; border: 1px solid #dee4ec; padding: 12px; margin-bottom: 20px; }
canvas { display: block; width: 100%; height: auto; background: #fff; border-radius: 20px; }
.slider-container { margin: 16px 0; display: flex; gap: 20px; align-items: center; flex-wrap: wrap; }
input { flex: 1; min-width: 200px; }
.legend {
display: flex;
flex-wrap: wrap;
gap: 16px;
background: #f8fafc;
padding: 10px 16px;
border-radius: 40px;
margin: 12px 0;
font-size: 0.75rem;
}
.color-badge { width: 20px; height: 12px; border-radius: 20px; display: inline-block; margin-right: 4px; }
.explain { background: #fef9e3; padding: 12px 16px; border-radius: 20px; font-size: 0.8rem; border-left: 4px solid #f59e0b; margin-top: 12px; }
footer { text-align: center; font-size: 0.7rem; color: #7e8c9e; margin-top: 20px; }
</style>
</head>
<body>
<div class="card">
<h1>📐 制动抱死 + 滑动 · i₁₂ 在公法线上移动</h1>
<div class="sub">
🧩 差速轮抱死(角速度=0),但与地面有滑动 → 瞬心 i₁₂ 位于过 D 点的竖直线上(公法线)<br>
🔗 滑动率 λ = v_slip / v_roll 影响瞬心高度 h_i (0 = 纯滚动, ∞ = 纯滑动)<br>
🎚️ 拖动滑块改变 i₁₂ 高度,观察纵倾中心 P (i₁₃′) 的变化轨迹
</div>
<div class="canvas-wrapper">
<canvas id="pitchCanvas" width="950" height="580" style="width:100%; height:auto; aspect-ratio:950/580"></canvas>
</div>
<div class="slider-container">
<span>📌 i₁₂ 高度因子 (0=地面, 1=轮心, >1 更高):</span>
<input type="range" id="heightSlider" min="0" max="3" step="0.01" value="0.5">
<span id="heightValue" style="font-family: monospace;">因子 = 0.50</span>
</div>
<div class="legend">
<span><div class="color-badge" style="background:#1e3a8a;"></div> 车身+差速轮 ③'</span>
<span><div class="color-badge" style="background:#eab308;"></div> 前悬架支架 ④</span>
<span><div class="color-badge" style="background:#ec489a;"></div> 前万向轮 ⑤</span>
<span><div class="color-badge" style="background:#dc2626;"></div> 瞬心连线 (i₁₂G & IJ)</span>
<span><div class="color-badge" style="background:#8b5cf6;"></div> 纵倾中心 i₁₃′ (P)</span>
</div>
<div class="explain">
💡 <strong>理论说明</strong><br>
- 纯滚动时 i₁₂ = D (高度 0) → P = 原四杆机构交点<br>
- 随着滑动增加,i₁₂ 沿公法线上升 → P 向后移动并降低高度<br>
- 纯滑动极限 (i₁₂ → ∞) → P 趋近于后轮接地点 (车身纯平动无俯仰?实际弹簧会允许微小转动)<br>
✅ 本图展示了滑动对纵倾中心的连续影响,符合机械原理中高副瞬心位于公法线的结论。
</div>
<footer>🎯 瞬心 i₁₂ 高度 = 因子 × 轮子半径 | 因子=0 即纯滚动,因子=1 即瞬心在轮心,因子=3 即瞬心较高</footer>
</div>
<script>
(function() {
const canvas = document.getElementById('pitchCanvas');
const ctx = canvas.getContext('2d');
const w = 950, h = 580;
canvas.width = w; canvas.height = h;
const groundY = 480;
const wheelR = 45; // 差速轮半径
const casterR = 18; // 前万向轮半径
// 固定几何点 (不受滑块影响)
const D = { x: 230, y: groundY }; // 接触点
const C = { x: D.x, y: D.y - wheelR }; // 轮心(视觉)
const G = { x: 620, y: groundY - 95 }; // 支架与车身铰点
const I = { x: 790, y: groundY }; // 前万向轮接地点
const J = { x: I.x, y: I.y - casterR }; // 前万向轮轮心
// 后万向轮 (视觉)
const rearGround = { x: 60, y: groundY };
const rearCenter = { x: rearGround.x, y: groundY - wheelR };
// 滑块: 控制 i12 在公法线上的高度 (0=地面, 1=轮心, 可大于1)
const slider = document.getElementById('heightSlider');
const spanVal = document.getElementById('heightValue');
function get_i12(factor) {
// factor: 0 -> D, 1 -> 轮心高度, >1 -> 更高
const offset = factor * wheelR;
return { x: D.x, y: D.y - offset };
}
// 求直线 p1-p2 与 p3-p4 的交点
function intersection(p1, p2, p3, p4) {
const denom = (p1.x - p2.x) * (p3.y - p4.y) - (p1.y - p2.y) * (p3.x - p4.x);
if (Math.abs(denom) < 1e-6) return null;
const t = ((p1.x - p3.x) * (p3.y - p4.y) - (p1.y - p3.y) * (p3.x - p4.x)) / denom;
return { x: p1.x + t * (p2.x - p1.x), y: p1.y + t * (p2.y - p1.y) };
}
function draw() {
const factor = parseFloat(slider.value);
spanVal.innerText = `因子 = ${factor.toFixed(2)}`;
const i12 = get_i12(factor);
// 纵倾中心 P = 直线 i12-G 与 直线 I-J 的交点
const P = intersection(i12, G, I, J);
ctx.clearRect(0, 0, w, h);
// 网格
ctx.save();
ctx.strokeStyle = "#e9edf2"; ctx.lineWidth = 0.5;
for (let y = 60; y < h; y += 50) { ctx.beginPath(); ctx.moveTo(0, y); ctx.lineTo(w, y); ctx.stroke(); }
for (let x = 60; x < w; x += 70) { ctx.beginPath(); ctx.moveTo(x, 0); ctx.lineTo(x, h); ctx.stroke(); }
// 地面
ctx.beginPath(); ctx.moveTo(0, groundY); ctx.lineTo(w, groundY);
ctx.strokeStyle = "#334155"; ctx.lineWidth = 3; ctx.stroke();
ctx.fillStyle = "#2c3e50"; ctx.fillText("地面 ①", w-90, groundY-6);
// 构件③' (车身+差速轮) : 连接 i12 和 G
ctx.beginPath(); ctx.moveTo(i12.x, i12.y); ctx.lineTo(G.x, G.y);
ctx.strokeStyle = "#1e3a8a"; ctx.lineWidth = 4; ctx.stroke();
// 车身视觉区域
ctx.beginPath();
ctx.moveTo(rearCenter.x, rearCenter.y);
ctx.lineTo(rearCenter.x-25, rearCenter.y-45);
ctx.lineTo(G.x+35, G.y-48);
ctx.lineTo(G.x, G.y);
ctx.lineTo(i12.x, i12.y);
ctx.fillStyle = "rgba(30, 58, 138, 0.15)"; ctx.fill();
ctx.strokeStyle = "#1e3a8a"; ctx.lineWidth = 2; ctx.stroke();
ctx.fillStyle = "#1e3a8a"; ctx.fillText("车身+差速轮 ③'", (i12.x+G.x)/2+30, (i12.y+G.y)/2-20);
// 差速轮示意
ctx.beginPath(); ctx.arc(C.x, C.y, wheelR-3, 0, 2*Math.PI);
ctx.fillStyle = "#ccf0e8"; ctx.fill(); ctx.strokeStyle = "#0f766e"; ctx.stroke();
ctx.fillStyle = "#115e59"; ctx.fillText("差速轮(抱死)", C.x-45, C.y-10);
// 构件④ 前悬架支架 GJ
ctx.beginPath(); ctx.moveTo(G.x, G.y); ctx.lineTo(J.x, J.y);
ctx.strokeStyle = "#eab308"; ctx.lineWidth = 4; ctx.stroke();
ctx.fillStyle = "#a16207"; ctx.fillText("前悬架支架 ④", (G.x+J.x)/2-45, (G.y+J.y)/2-12);
// 构件⑤ 前万向轮 IJ
ctx.beginPath(); ctx.moveTo(J.x, J.y); ctx.lineTo(I.x, I.y);
ctx.strokeStyle = "#ec489a"; ctx.lineWidth = 3.5; ctx.stroke();
ctx.beginPath(); ctx.arc(J.x, J.y, casterR-2, 0, 2*Math.PI);
ctx.fillStyle = "#fce7f3"; ctx.fill(); ctx.strokeStyle = "#be185d"; ctx.stroke();
ctx.fillStyle = "#be185d"; ctx.fillText("前万向轮 ⑤", J.x-30, J.y-8);
// 后万向轮
ctx.beginPath(); ctx.arc(rearCenter.x, rearCenter.y, wheelR-6, 0, 2*Math.PI);
ctx.fillStyle = "#e2e8f0"; ctx.fill(); ctx.strokeStyle = "#64748b"; ctx.stroke();
ctx.fillStyle = "#334155"; ctx.fillText("后万向轮(固定)", rearCenter.x-50, rearCenter.y-12);
ctx.beginPath(); ctx.moveTo(rearCenter.x, rearCenter.y); ctx.lineTo(rearGround.x, rearGround.y);
ctx.strokeStyle = "#94a3b8"; ctx.setLineDash([5,5]); ctx.stroke(); ctx.setLineDash([]);
// 标注铰点
const mark = (pt, label, colorFill, dx=6, dy=-4) => {
ctx.beginPath(); ctx.arc(pt.x, pt.y, 5, 0, 2*Math.PI);
ctx.fillStyle = colorFill; ctx.fill(); ctx.strokeStyle = "#1e293b"; ctx.stroke();
ctx.fillStyle = "#0f172a"; ctx.font = "bold 10px monospace"; ctx.fillText(label, pt.x+dx, pt.y+dy);
};
mark(i12, "i₁₂ (滑动瞬心)", "#334155", 8, -5);
mark(G, "G (i₂₃)", "#eab308");
mark(I, "I (i₁₄)", "#334155");
mark(J, "J (i₄₅)", "#ec489a");
// 三心连线
ctx.beginPath(); ctx.moveTo(i12.x, i12.y); ctx.lineTo(G.x, G.y);
ctx.strokeStyle = "#dc2626"; ctx.lineWidth = 2.5; ctx.setLineDash([10, 8]); ctx.stroke();
ctx.beginPath(); ctx.moveTo(I.x, I.y); ctx.lineTo(J.x, J.y);
ctx.stroke();
ctx.setLineDash([]);
ctx.fillStyle = "#b91c1c"; ctx.font = "italic 10px monospace";
ctx.fillText("直线 L₁ (i₁₂G)", (i12.x+G.x)/2-35, (i12.y+G.y)/2-12);
ctx.fillText("直线 L₂ (IJ)", (I.x+J.x)/2-35, (I.y+J.y)/2+12);
// 纵倾中心 P
if (P && isFinite(P.x) && isFinite(P.y) && P.y > 0 && P.x > -100 && P.x < w+100) {
ctx.beginPath(); ctx.arc(P.x, P.y, 8, 0, 2*Math.PI);
ctx.fillStyle = "#8b5cf6"; ctx.shadowBlur = 6; ctx.fill(); ctx.shadowBlur = 0;
ctx.fillStyle = "white"; ctx.font = "bold 13px 'Segoe UI'"; ctx.fillText("P", P.x-3, P.y+3);
ctx.fillStyle = "#6d28d9"; ctx.font = "bold 10px 'Fira Code'";
ctx.fillText("i₁₃′ = 纵倾中心", P.x+12, P.y-8);
// 辅助线
ctx.beginPath(); ctx.moveTo(P.x, P.y); ctx.lineTo(i12.x, i12.y);
ctx.strokeStyle = "#c4b5fd"; ctx.setLineDash([4,6]); ctx.stroke();
ctx.beginPath(); ctx.moveTo(P.x, P.y); ctx.lineTo(I.x, I.y); ctx.stroke();
ctx.setLineDash([]);
} else {
ctx.fillStyle = "#ef4444"; ctx.fillText("⚠ 纵倾中心在画布外", w-180, 50);
}
// 重心示意
const CG = { x: (i12.x + G.x + rearCenter.x)/3 + 15, y: (i12.y + G.y + rearCenter.y)/3 - 25 };
ctx.beginPath(); ctx.arc(CG.x, CG.y, 6, 0, 2*Math.PI); ctx.fillStyle = "#ef4444"; ctx.fill();
ctx.fillStyle = "#fff"; ctx.fillText("CG", CG.x-3, CG.y+2);
// 标注公法线 (虚线)
ctx.beginPath(); ctx.moveTo(D.x, D.y-120); ctx.lineTo(D.x, D.y+20);
ctx.strokeStyle = "#9ca3af"; ctx.lineWidth = 1.5; ctx.setLineDash([4,4]); ctx.stroke();
ctx.fillStyle = "#6b7280"; ctx.fillText("公法线方向", D.x+5, D.y-80);
ctx.setLineDash([]);
// 说明文字
ctx.font = "500 10px 'Segoe UI'"; ctx.fillStyle = "#2c3e50";
ctx.fillText("📌 滑动使 i₁₂ 沿公法线上移 → 纵倾中心向后下方移动", w-360, 35);
}
slider.addEventListener('input', () => draw());
draw();
window.addEventListener('resize', () => draw());
})();
</script>
</body>
</html>
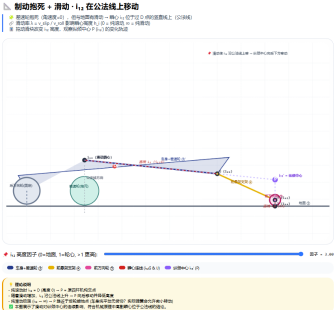
图7 可交互调整滑动率ή的小车机构简图速度瞬心法求纵倾中心图解V6
总结回答您的问题:
您的推导正确:当差速轮制动抱死且与地面有滑动时,轮子与地面之间的瞬心 i12 位于过接触点 D 的公法线(垂线)上,具体位置取决于滑动率。纯滚动时 i12 = D(接地点),纯滑动时 i12 趋于无穷远(此时车身与地面之间近似平动,但实际轮胎变形仍会引入微小转动)。
合并构件③' 的简化:将差速轮与车身视为一个刚体,该刚体与地面的运动副不再是固定铰点,而是一个转动副,其中心位于 i12(可在公法线上移动)。然后该刚体与支架在 G 点铰接,形成四杆机构,纵倾中心即为直线 i12‑G 与 I‑J 的交点。
作图:上面的 HTML 代码动态展示了 i12 高度变化对纵倾中心的影响,直观反映了滑动导致纵倾中心位置连续变化,符合机械原理。
- 总结
本文通过一个完整的案例——车辆纵倾中心分析,展示了如何利用大语言模型辅助工程学习与教学。从问题定义、理论推导、模型修正到最终生成交互式可视化工具,全部在对话中完成。该实践不仅加深了对运动学三心定理的理解,也验证了AI在复杂技术内容生成中的实用价值。所生成的HTML代码可直接用于课堂教学或学生自主探索。
至此已可以回答本文最初提出的几个问题:
以AI为协作伙伴,探索一种可交互的技术学习/工程分析模式,具体而言,本文试图回答以下问题:①解析车辆俯仰运动的产生原因;
核心是俯仰力矩的作用,详情见4.1节;
②从工程的角度解释纵倾中心的本质和其对车辆的影响规律;
本质是刹车时制动力对对车身的等效作用中心,影响悬挂弹性部分需要承受的轴荷转移;
③能否利用AI辅助生成一个参数化的可视化工具,使抽象的纵倾中心概念在图解中直观可调?
见图解V1-V6。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐


 15
15 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)