基于simulink的仿生手指运动建模与仿真
目录
✨1.课题概述
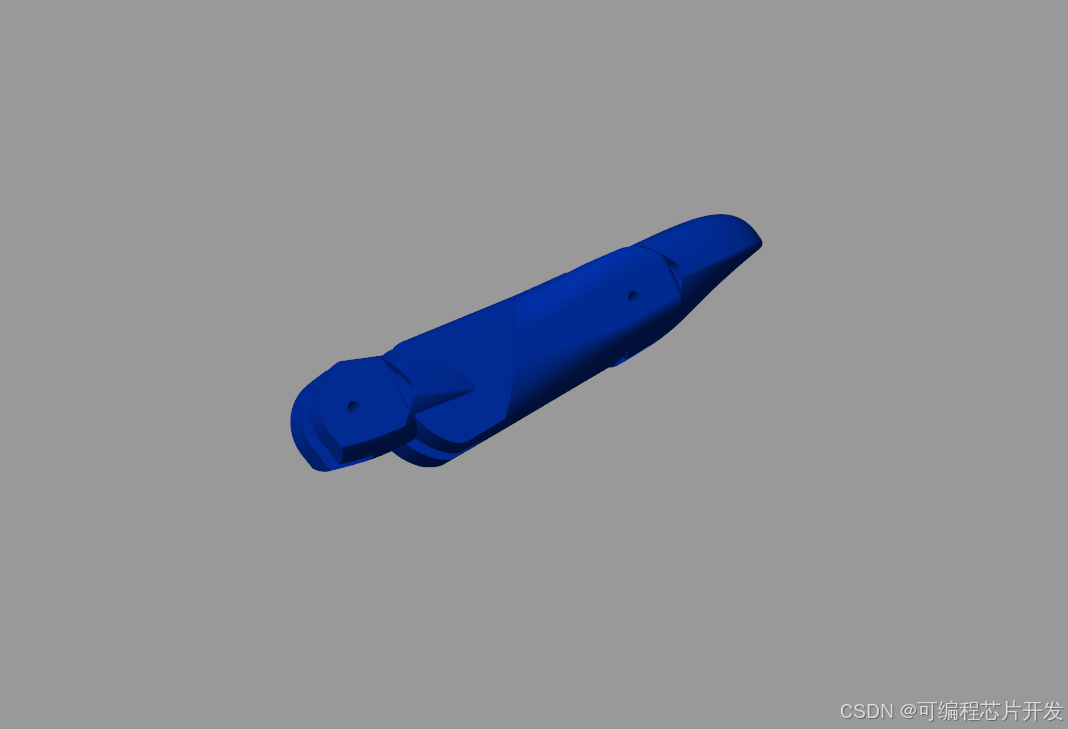
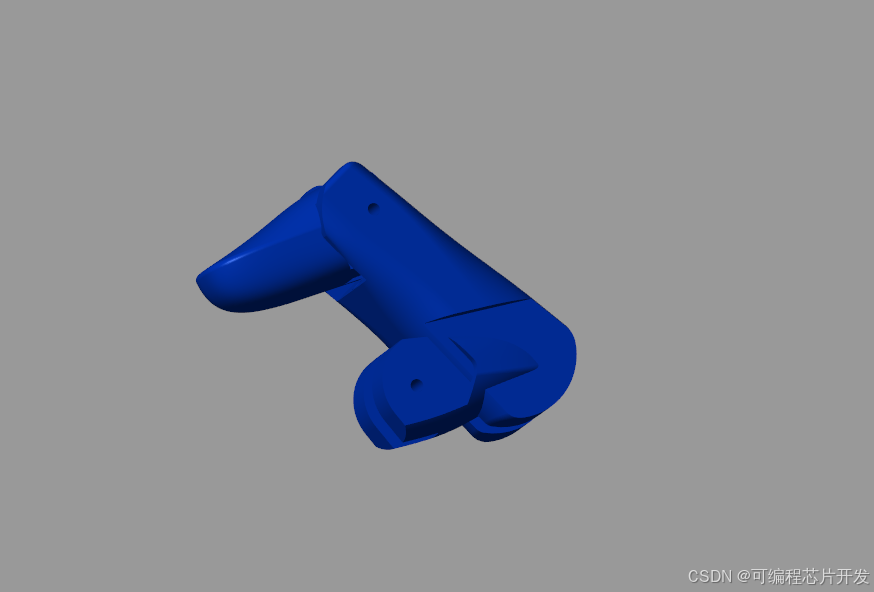
仿生手指是仿人机器人手部的核心执行单元,其运动特性直接决定了抓取操作的灵活性与稳定性。本文基于Simulink多体仿真环境,构建了含线性作动器驱动、腱传动机构的仿生手指模型,实现了关节运动响应的动态仿真。
📊2.系统仿真结果
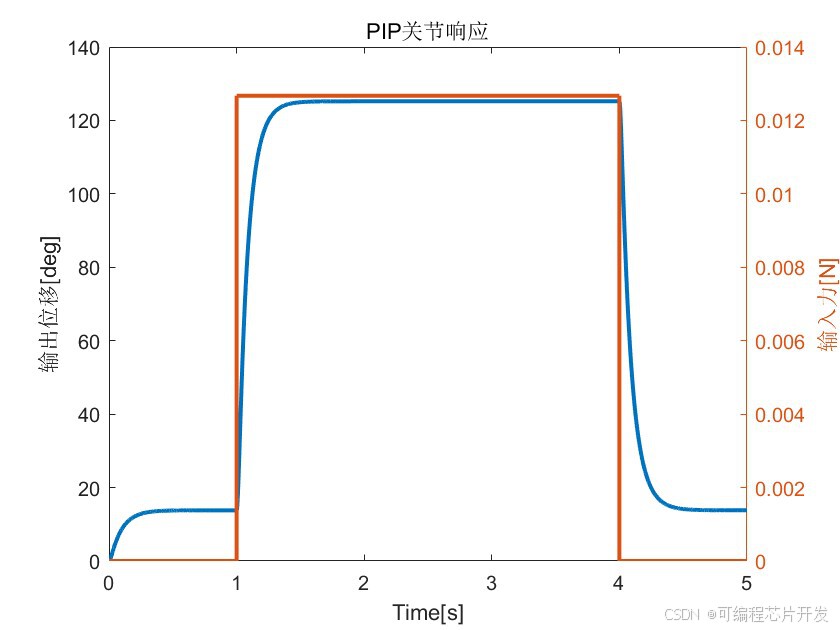
PIP关节响应:在1~4s阶跃力输入下,关节角位移从初始约15°快速上升至125°左右,调节时间约0.5s,稳态误差接近0;撤去输入力后,关节角位移快速回落至初始位置,响应过程无明显超调。
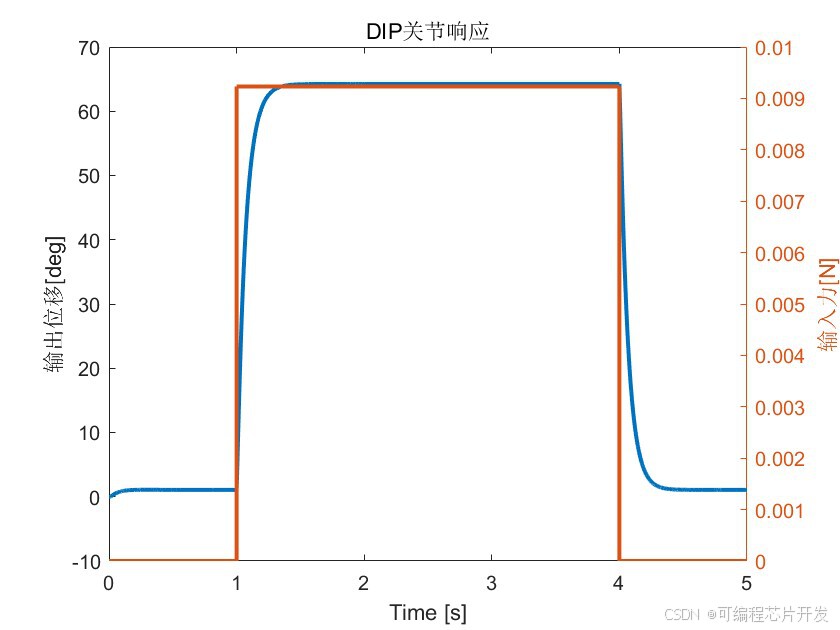
DIP关节响应:在相同输入力作用下,关节角位移从0°上升至约65°,响应速度与PIP关节基本同步,稳态角位移约为PIP关节的一半,体现了腱传动机构的力臂耦合特性。
✅3.核心程序或模型
% 平移方式 - 直角坐标
% 旋转方式 - 任意轴
smiData.RigidTransform(1).translation = [-12.001099999999999 23 1.9999999999999982]; % mm
smiData.RigidTransform(1).angle = 2.0943951023931953; % rad
smiData.RigidTransform(1).axis = [0.57735026918962584 0.57735026918962584 0.57735026918962584];
smiData.RigidTransform(1).ID = 'B[BionicFingerBase5b-1:-:BionicFingerMiddle5b-1]';% 平移方式 - 直角坐标
% 旋转方式 - 任意轴
smiData.RigidTransform(2).translation = [-12.001099999999999 9.0000000000002771 0.99999999999949551]; % mm
smiData.RigidTransform(2).angle = 2.0943951023931953; % rad
smiData.RigidTransform(2).axis = [0.57735026918962584 0.57735026918962584 0.57735026918962584];
smiData.RigidTransform(2).ID = 'F[BionicFingerBase5b-1:-:BionicFingerMiddle5b-1]';% 平移方式 - 直角坐标
% 旋转方式 - 任意轴
smiData.RigidTransform(3).translation = [0 0 0]; % mm
smiData.RigidTransform(3).angle = 0; % rad
smiData.RigidTransform(3).axis = [0 0 0];
smiData.RigidTransform(3).ID = 'B[BionicFingerBase5b-1:-:]';% 平移方式 - 直角坐标
% 旋转方式 - 任意轴
smiData.RigidTransform(4).translation = [0 0 0]; % mm
smiData.RigidTransform(4).angle = 0; % rad
smiData.RigidTransform(4).axis = [0 0 0];
smiData.RigidTransform(4).ID = 'F[BionicFingerBase5b-1:-:]';
🚀4.系统原理简介
仿生手指的运动建模核心是多刚体动力学+腱传动力传递的耦合建模,其核心逻辑可分为三层:
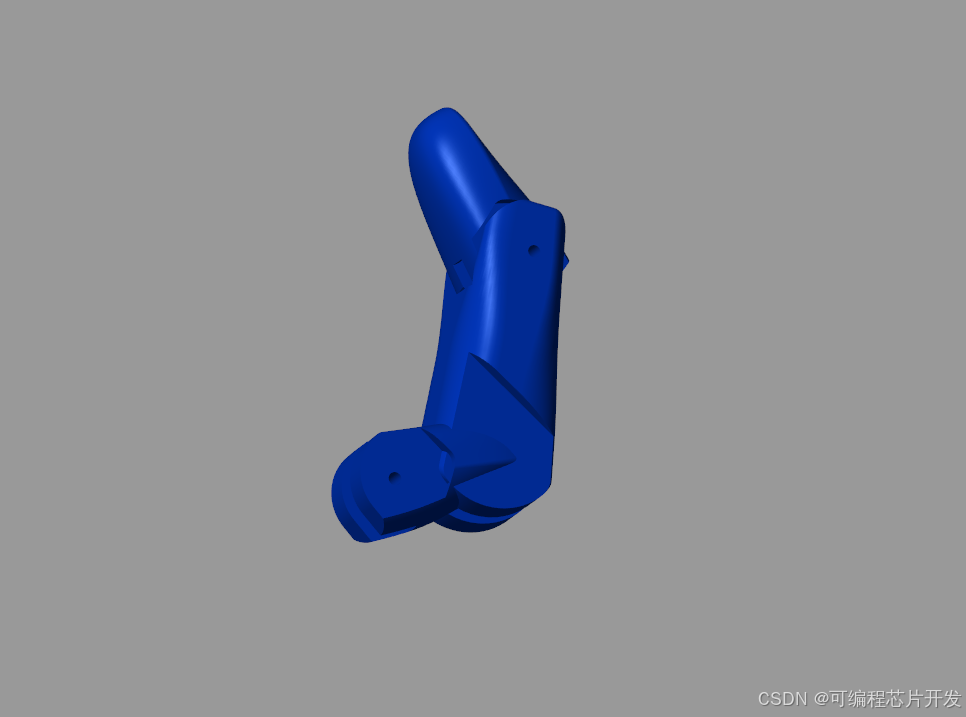
多刚体运动学建模:将仿生手指拆解为基座、中节、指尖三段刚体,通过旋转关节(PIP近侧指间关节、DIP远侧指间关节)串联,构成开链运动机构。根据Denavit-Hartenberg(D-H)参数法,描述各刚体间的位姿变换关系,建立从关节空间到笛卡尔空间的运动学映射。
腱传动与力臂模型:仿生手指采用线性作动器驱动,通过腱绳绕关节力臂实现力-力矩转换。作动器输出的拉力Fa通过关节力臂r转化为关节驱动力矩τ,满足关系τ=r⋅Fa,同时通过耦合传动机构实现PIP与DIP关节的联动。
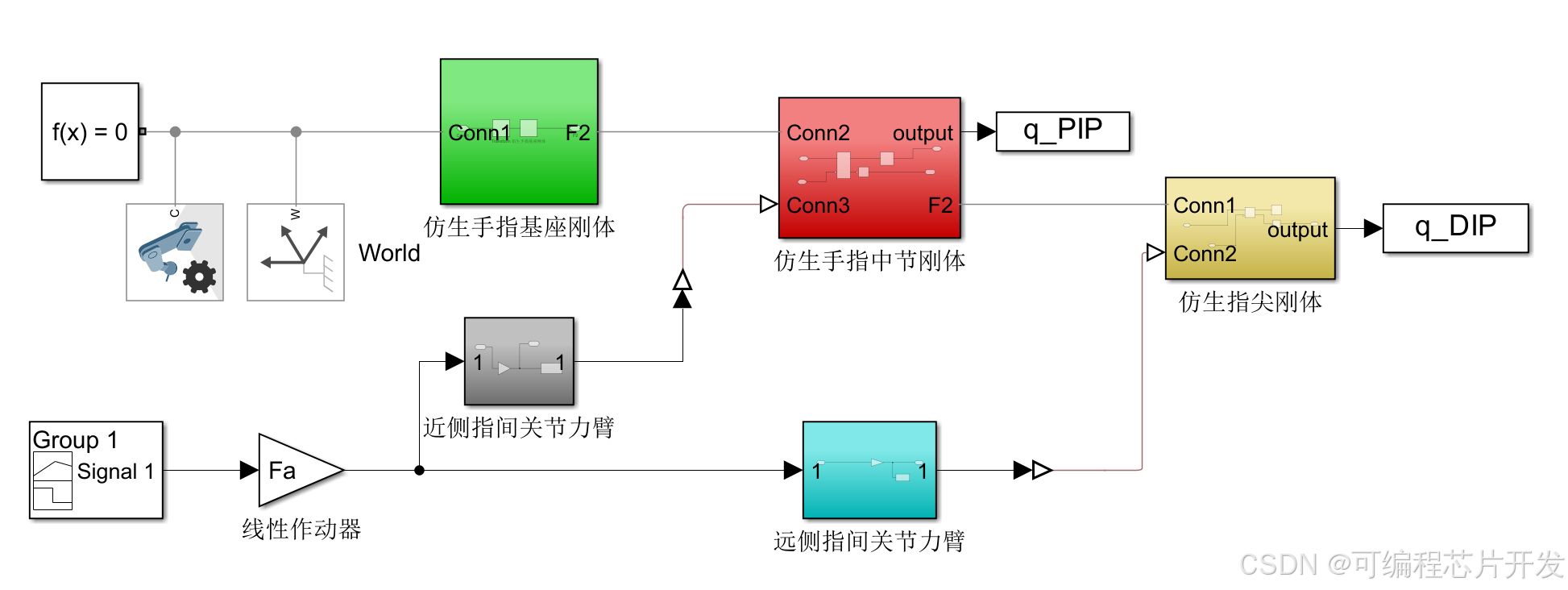
仿生手指的三段刚体(基座、中节、指尖)通过旋转关节串联,在Simulink中使用Simscape Multibody模块搭建拓扑结构:
基座刚体(绿色模块)通过World坐标系固定于地面,作为运动链的根节点,其初始位姿由世界坐标系定义,满足刚体位置与姿态的初始约束条件。
中节刚体(红色模块)通过Revolute Joint模块与基座连接,定义为PIP关节,转动轴沿手指侧方向,允许关节在矢状面内屈曲/伸展运动,关节角位移记为qPIP。
指尖刚体(黄色模块)通过Revolute Joint模块与中节连接,定义为DIP关节,转动轴与PIP关节平行,关节角位移记为qDIP。
💢5.完整工程文件
v v
关注后,GZH回复关键词:a44

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐

 2
2 0
0- 0



 已为社区贡献11条内容
已为社区贡献11条内容

所有评论(0)