突破四足移动操作:Kinova 机械臂全动力学 NMPC 控制框架
在四足机器人与机械臂协同作业的研究与工程应用中,当机械臂质量较大、动力学特性不可忽略时,传统控制框架往往因为模型过度简化,导致整机在行走、操作、负载、抗扰等场景下出现步态抖动、重心偏移、跟踪精度下降甚至失稳倾倒。
本文基于arXiv:2507.22042最新学术论文成果。该框架最大的贡献在于,在不忽略机械臂动力学的前提下,通过模型分解与双层实时控制架构,实现四足本体与 Kinova 机械臂的稳定、高效、鲁棒协同。
在具身智能、自主移动操作快速发展的今天,四足机器人凭借地形适应能力强、运动灵活、越障能力突出等优势,逐渐成为户外巡检、应急救援、工业现场、家庭服务等场景的重要载体。而为了让四足机器人真正具备 “作业能力”,而不只是 “行走工具”,搭载机械臂完成抓取、搬运、推拉、开关门、操作工具等任务,已经成为行业共识与技术趋势。
但在实际研发与实验过程中,研究者与工程师会普遍遇到一个非常现实的问题:当机械臂质量较大、动力学特性不可忽略时,四足本体的稳定性会受到巨大影响,传统控制方法几乎无法胜任。
第一,传统控制框架过度简化机械臂动力学
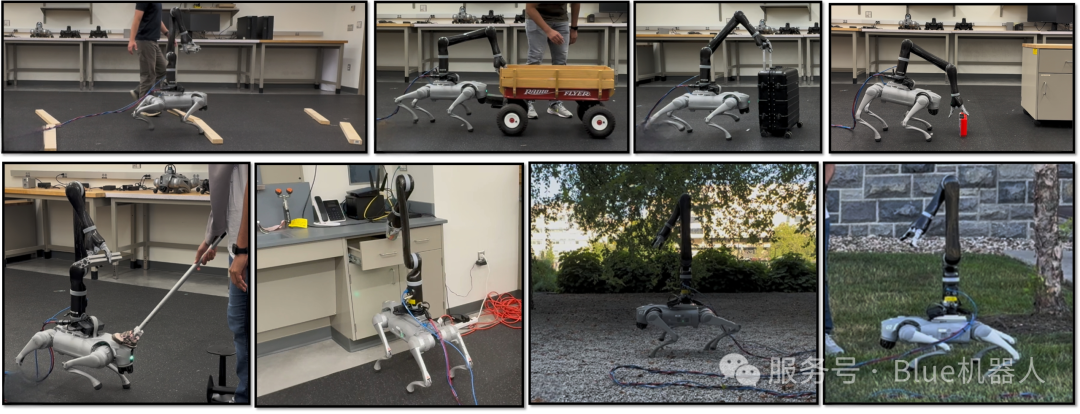
重型 Kinova 臂对小型四足的扰动极强,极易引发步态失稳。论文所使用的硬件平台非常具有代表性:四足本体为 Unitree Go2,自重约 15kg;机械臂为 Kinova Gen2 4 自由度力矩臂,自重 4.4kg。简单计算就可以发现,机械臂质量已经达到四足本体质量的29%。同时,Kinova 臂展开后高度较高,质心偏移明显,臂展高度接近本体高度的 216%。
这意味着,只要机械臂开始运动、承载负载、对外施力,就会对四足本体产生明显的倾覆力矩、惯性冲击与重心偏移。在崎岖地面、外力推动、重载推拉等场景下,传统控制器根本无法快速响应这种强耦合扰动,最终表现为步态晃荡、机身倾斜、跟踪精度变差,甚至直接摔倒。
而如果为了实时性不断简化模型,又会丢失关键动态信息,导致鲁棒性不足、抗扰能力差、作业精度低。这种 “精度 — 实时性” 两难问题,长期限制了小型四足搭载重型 Kinova 臂的实际应用。

二、分解式 NMPC + 双层控制架构
我们从模型分解、控制架构、关键模块三个层面,进行完整、原创、忠于原文的解读。
1. 模型分解策略:
(1)四足运动子系统:单刚体模型(SRB)对于四足本体的移动与步态,论文采用工程中常用的单刚体模型。这个模型只关注机器人的质心位置、线速度、姿态、角速度以及地面反作用力,维度低、计算快,能够高效完成步态优化、重心调整、姿态稳定等关键任务,保证四足在各种地形下都能稳定行走。
(2)机械臂子系统:完整保留 Kinova 臂全阶动力学与传统方法不同,这篇论文没有简化 Kinova 机械臂,而是直接使用基于欧拉 — 拉格朗日方程得到的全阶动力学模型。模型包含质量矩阵、科氏力 / 离心力项、重力项、关节力矩输入、交互力映射等全部关键动态特性。
(3)交互约束:实时计算本体与机械臂的力 / 力矩耦合两个子系统并不是独立运行,而是通过完整约束强制保证机械臂基座与四足机身刚性固连。在优化过程中,算法会实时求解两者之间的交互 wrench(力与力矩),并把它作为状态变量纳入优化目标。
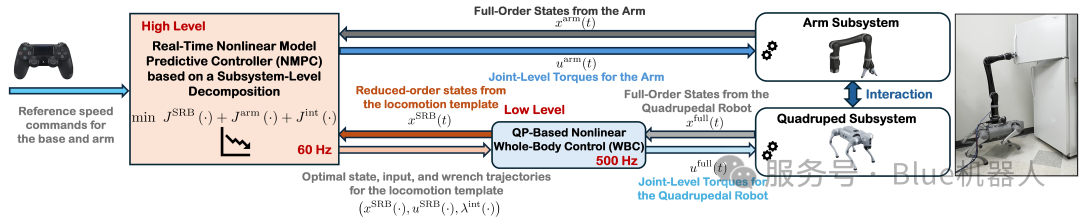
2. 双层实时控制架构:60Hz 规划 + 500Hz 执行
(1)高层:非线性模型预测控制(NMPC),运行频率 60Hz高层 NMPC 是整个系统的 “大脑”。它在每个控制周期内,统一完成以下任务:
-
优化四足本体的质心轨迹、姿态轨迹、地面反作用力
-
优化 Kinova 机械臂的关节位置、速度、力矩指令
-
优化四足与机械臂之间的交互力 / 力矩
-
满足摩擦锥约束、力矩限幅、关节限位等安全约束
-
NMPC 以滚动时域方式运行,每次只求解未来一小段轨迹,保证实时性。论文使用 CasADi + IPOPT 求解,在常规 Intel 桌面 CPU 上即可稳定运行。
(2)低层:全身控制器(WBC),运行频率 500Hz低层 WBC 负责把高层 NMPC 给出的指令 “精准落地”。它基于二次规划(QP),实时计算四足每条腿的关节力矩,保证机身严格跟踪质心与姿态目标,同时抑制振动、扰动、模型误差。
(3)Kinova 机械臂:力矩直驱,无中间 PD 转换与很多方案不同,这篇论文中Kinova 机械臂不经过额外的位置环 / 速度环,而是直接使用 NMPC 输出的关节力矩指令。这种方式延迟更低、动态响应更快、力控精度更高,尤其适合推拉重物、开关门、操作设备等需要力控的作业场景。
3. 优化目标设计:稳定、平滑、精准三者兼顾
论文的 NMPC 代价函数由三部分组成:
-
四足子系统代价:跟踪质心、姿态、足端轨迹
-
机械臂子系统代价:跟踪关节位置、限制力矩大小
-
交互代价:抑制本体与臂之间的过大冲击
通过合理调节权重,系统可以在 “稳定、平滑、精准” 之间达到最优平衡,既不会因为过于追求操作速度而失稳,也不会因为过于保守而动作迟钝。
三、实验验证与结果
1. 硬件平台
-
四足机器人:Unitree Go2,自重 15kg,18 自由度
-
机械臂:Kinova Gen2 4-DoF 力矩机械臂,自重 4.4kg,带三指夹爪
-
控制系统:离线 PC,Intel Core i9,以太网通信
-
求解环境:CasADi + IPOPT,NMPC 60Hz,WBC 500Hz
选择 Kinova 臂并非偶然,而是因为它力矩控制能力强、质量典型、动力学特性明显,最能验证 “不可忽略机械臂动力学” 这一核心前提。
2. 典型实验任务
论文设计了五大类实验,覆盖移动操作最核心、最工程化的场景:
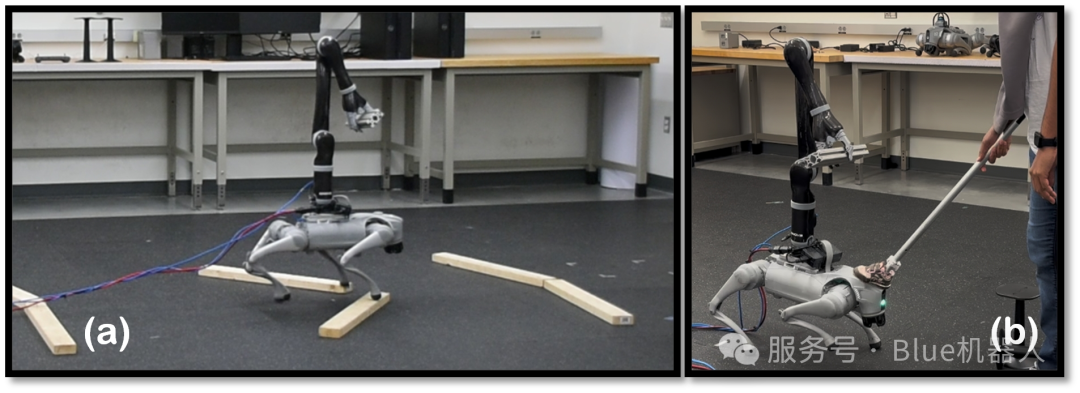
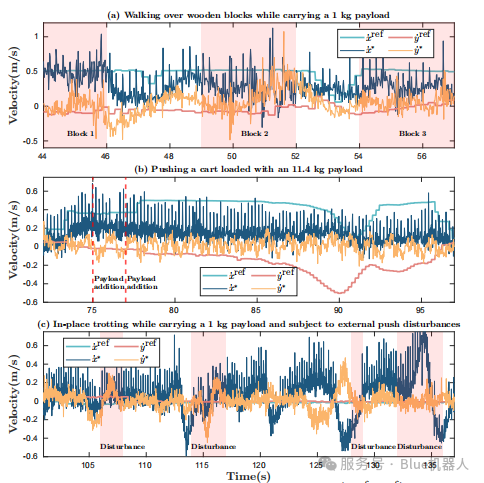
(1)崎岖地形移动操作机器人在铺设 5cm 木块的崎岖地面、草地、碎石路面上连续行走,同时 Kinova 臂携带 1kg 负载。实验结果显示,系统步态稳定、无明显晃动、无打滑倾倒、质心跟踪误差小,证明在无感知非结构地形中依然具备强鲁棒性。
(2)外力扰动抗扰实验机器人在原地小跑状态下,接受人为横向推力冲击。在明显外力扰动下,四足本体快速调整姿态与重心,迅速恢复稳定,同时 Kinova 臂保持持物状态不晃动,展示出优秀的扰动抑制能力。
(3)重载未知负载推拉操作这是最能体现机械臂动力学价值的实验之一。机器人推动总重达 24.4kg 的推车,其中有效负载已经达到四足本体质量的 125%。在负载未知、质量不确定、地面摩擦不确定的条件下,系统依然稳定完成推拉、前进、转向等动作。这证明:只有把 Kinova 臂的动力学完整纳入控制,才能真正实现重载可靠作业。
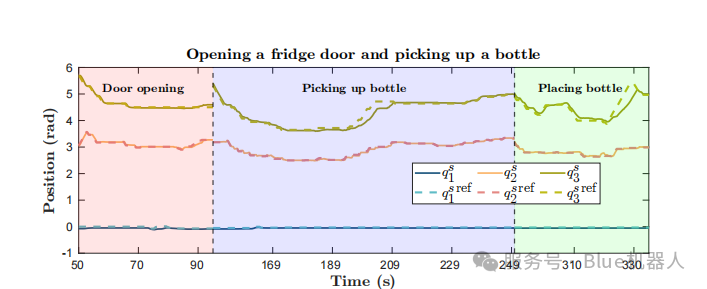
(4)家庭 / 室内精细操作机器人完成一系列贴近真实使用场景的任务:
-
打开冰箱门 → 抓取瓶子 → 放置台面 → 关闭冰箱门
-
旋转门把手 → 推开房门 → 通过门洞
-
拉开抽屉 → 抓取物件 → 关闭抽屉 → 放置桌面所有动作连贯、稳定、无抖动,行走与操作无缝衔接,完全达到 “可实用” 级
首次在小型四足平台上实现重型 Kinova 力矩臂的全动力学移动操作,填补技术空白。在这篇论文之前,小型四足机器人几乎只能搭载轻量化、弱动力学、位置控制型机械臂。一旦使用 Kinova 这类质量占比高、力矩特性强的机械臂,系统稳定性会急剧下降。该论文首次证明:在不忽略、不简化机械臂动力学的前提下,依然可以构建计算高效、实时运行、鲁棒性强的控制框架,让 Kinova 重型力矩臂真正安全、稳定、可靠地工作在小型四足平台上。这直接拓宽了复合机器人的硬件组合边界,让 “小四足 + 大臂” 从不可能变为可能。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐


 12
12 0
0- 0



 已为社区贡献5条内容
已为社区贡献5条内容

所有评论(0)