基于深度学习+AI的水下目标目标检测与预警系统(Python源码+数据集+UI可视化
基于深度学习+AI的水下目标目标检测与预警系统(Python源码+数据集+UI可视化界面+YOLOv8训练结果)
1、背景介绍
针对海洋资源勘探、水下生态保护、水产养殖管控与水下工程安全需求,面向近海海域、水产养殖池、水下施工区域、海洋保护区等场景,研发基于深度学习+AI的水下目标检测与预警系统(目标类别包含’echinus’(海胆)、‘holothurian’(海参)、‘scallop’(扇贝)、‘starfish’(海星))具有重要现实意义。随着海洋资源开发力度加大、水产养殖规模化发展与水下生态保护规范化推进,上述四类水下目标作为影响水产养殖效益、海洋生态平衡、水下工程安全的核心关联因素,其分布分散性强、活动隐蔽性高、种类识别难度大、动态监测滞后等问题带来的养殖损耗、生态破坏、工程隐患等管理痛点日益凸显,年均因四类目标监测不及时、识别不准确引发的水产病害传播、养殖产量减产、海洋生态失衡、水下施工受阻等问题频发,严重影响海洋资源利用效率、水产养殖效益与水下作业安全。传统人工潜水探测、定点采样监测受水下环境复杂、人力成本高昂、监测范围有限、识别精度低、动态捕捉滞后等因素制约,难以实现全水域、全时段的精准监测与管控,而AI智能分析技术可依靠四类目标的形态特征、运动轨迹与水下环境特征的差异,捕捉不同目标的细微形态差异与动态变化,实现水质浑浊、光照不足、目标密集、水流干扰等复杂水下环境下,四类目标的精准识别与分类,突破传统监测技术难以适配复杂水下环境、难以实现多目标同步识别、监测范围有限的瓶颈。
将深度学习目标检测算法与AI智能分析、水下视频监控设备结合,能够精准识别’echinus’、‘holothurian’、‘scallop’、'starfish’四类核心监测目标,有效区分四类目标与水下杂物、水生植物、礁石等干扰因素,精准识别各类目标的数量、分布位置、活动状态与生长情况,借助水下视频监控的全时段值守、水下机器人的灵活巡航优势,实现对监测水域全域的四类水下目标自动识别、类别精准分类、数量动态统计、异常状态预警,同步推送预警信息至管理人员与监测终端,及时反馈目标异常聚集、病害感染、分布失衡等问题,提升各类水下场景监测系统的智能化、全域化与精准处置能力,对规范水产养殖管理、提升海洋资源勘探效率、保护海洋生态平衡、防范水下工程隐患、降低人工监测成本、强化水下目标精准管控具有重要应用价值,为水产养殖、海洋勘探、生态保护、水下工程等各类水下场景的规范化管理、智能化监测提供高效、可靠的技术支撑,助力破解水下四类目标监测难、识别准度低、动态管控滞后的管理难题,保障水下作业安全、提升海洋资源利用效能与维护海洋生态平衡。
2、算法结构
目标检测是一种基于目标集合和统计特征的图像分割,主要包括分类问题和检测定位问题。目标检测算法以深度学习为基准的主要有两大类:基于回归分析的单阶段目标检测和基于候选区域的两阶段目标检测。
基于回归分析的单阶段目标检测算法在检测目标时采用一个网络进行端到端的目标检测,直接对图像进行计算生成检测结果,检测速度快,但检测精度低。主要代表是YOLO系列和SSD系列。2015年,Joseph等人提出了一种新的目标算法YOLO,其思想是将一张图片分成多个网格,让每个网格负责预测中心点落在当前网格中的物体。该方法目标检测速度快、可以避免背景错误并能学到物体的泛化特征,但存在定位不准、精度低和对小物体检测效果不好的问题。Joseph在接下来的几年从骨干网络和跨尺度特征融合等方面对YOLO进行优化改进,相继提出了YOLOv2和YOLOv3。2016年,Liu等人提出了结合YOLO检测速度快和Faster R-CNN的锚框思想的SSD算法,并使用多尺度特征图进行检测,在满足检测速度要求的同时还大幅提高了模型的检测精度,但由于小尺寸的目标多用较低层级的锚框来训练,较低层级的特征非线性程度不够,无法训练到足够的精确度,所以仍存在小目标的检测效果差的问题。
基于候选区域的两阶段目标检测是先对图像提取候选框,然后对候选框进行分类回归操作得到检测结果,检测精度较高,但检测速度较慢,训练时间长且误报高。主要代表算法有R-CNN系列、SPP-Net和FPN。Girshick等人在2014年提出了两阶段目标检测算法R-CNN,通过选择性搜索的方法提取出候选区域,然后将候选区域变换为标准的方形尺寸并使用改进的AlexNet筛选出有效的候选区域,最后通过支持向量机进行分类并对有效的候选区域进行线性回归获得边界框,该算法有着较高的准确性并提高了特征对样本的表示能力,但由于图像尺寸限制造成目标失真变形并且存在冗余计算、检测速度慢。针对这个问题,He等人提出了SPP-Net,在卷积层和全连接层之间增添一个空间金字塔池化模块,不仅可以对候选区域进行变换为任意比例的区域特征提取,而且可以减少候选区域的重复计算,该算法不仅提高了目标检测的精度,同时又提升了目标检测速度,但训练过程仍是多阶段的,而且无法实现端到端训练。2015年,Girshick等人结合R-CNN和SPP-Net的特点提出了Fast R-CNN,通过卷积层对整张图像和候选区域进行特征提取,并使用感兴趣池化层和Softmax分别取代空间金字塔池化模块和SVM,同时提高了精度和速度,但由于选择性搜索算法只能使用CPU,仍无法实现实时检测。Ren等人针对此问题在同年提出了Faster R-CNN,Faster R-CNN最大的特点是首次提出了一个全新的候选区域网络(Region Proposal Network, RPN),该算法不仅可以端到端训练,而且可以在GPU上实时性检测,但由于anchor的使用,仍对小目标的检测效果并不理想。Lin等人于2017年在Faster R-CNN基础上提出了特征金字塔网络检测算法FPN,通过多层特征融合,大大提高了小目标物体的检测效果。
为了契合对检测性能与实时性的更高要求,本文选用以 YOLOv11 为根基的单阶段目标检测算法作为基准。YOLOv11 模型作为迭代升级的实时目标检测框架,凭借其更为迅猛的检测速率以及大幅提升的检测精度,在同类算法中展现出显著优势,其网络结构如图所示。本文深入研究的算法正是在 YOLOv11 的基础上开展改进与优化工作,旨在进一步强化目标检测的准确性与实时性,从而更好地适配特定应用场景的复杂多样需求。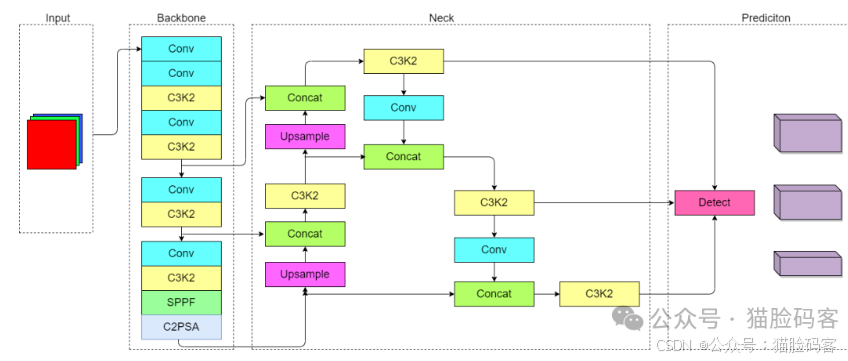
3、数据集
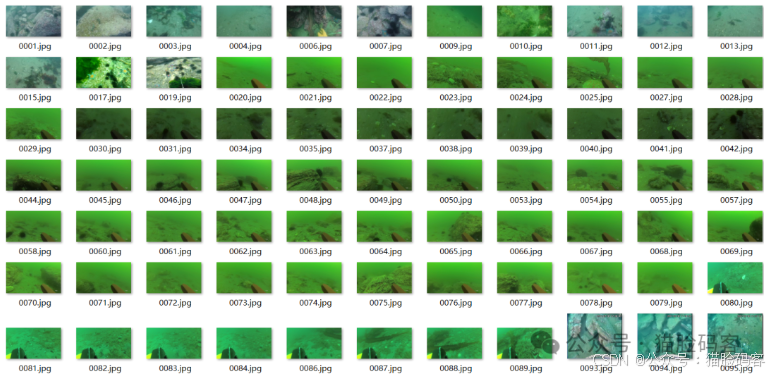
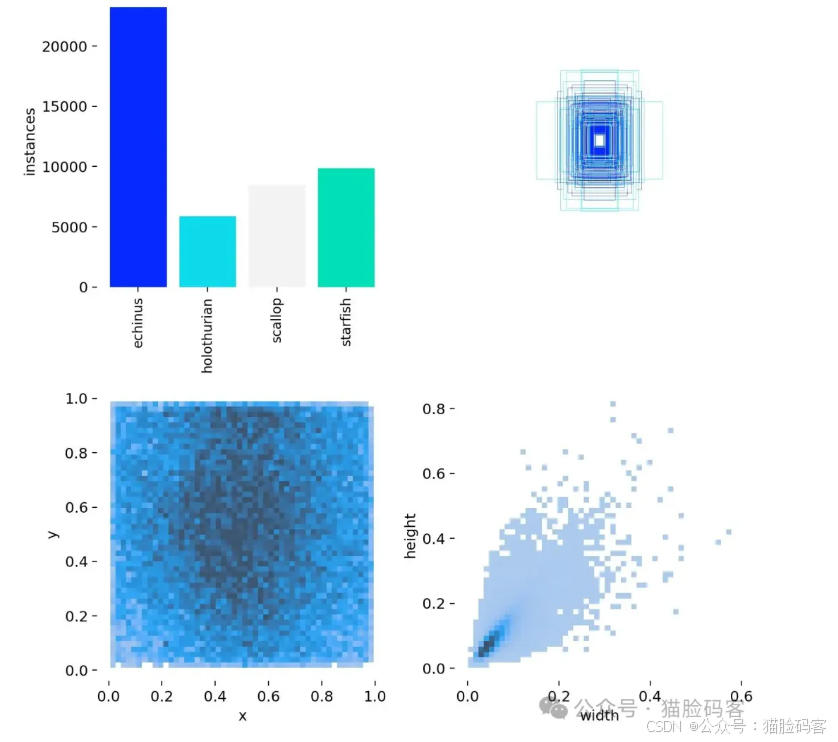
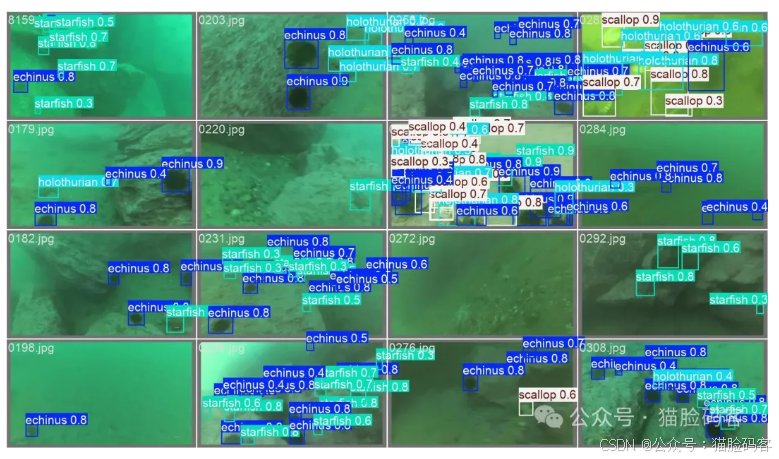
本算法研究数据集来源于公开数据集UnderwaterDataset进行实验,UnderwaterDataset数据集信息如图所示。本文共选取四种水下目标的9600张图像,每张图像的大小为640x640像素,包括不同光照强度、不同角度的图像。然后通过在线标注工具MakeSense(https://www.makesense.ai/)进行标注,将标注后的图像划分为6561张图像作为训练集,1639张图像作为训练集,1400张图像作为测试集。
# 目录结构
UnderwaterDataset
├── images/
│ ├── train/
│ ├── val/
│ └── test/
└── labels/
├── train/
├── val/
└── test/
# 适用算法
"yolov26/yolov13/yolov12/yolov11/yolov10/yolov8/yolov5等YOLO系列"
# 类别
'echinus'
'holothurian'
'scallop'
'starfish'
# yaml文件配置
path: UnderwaterDataset # dataset root dir
train: images/train # train images (relative to 'path') 4 images
val: images/val # val images (relative to 'path') 4 images
test: images/test # test images (optional)
# Classes
names: ['echinus', 'holothurian', 'scallop', 'starfish']
4、评价指标
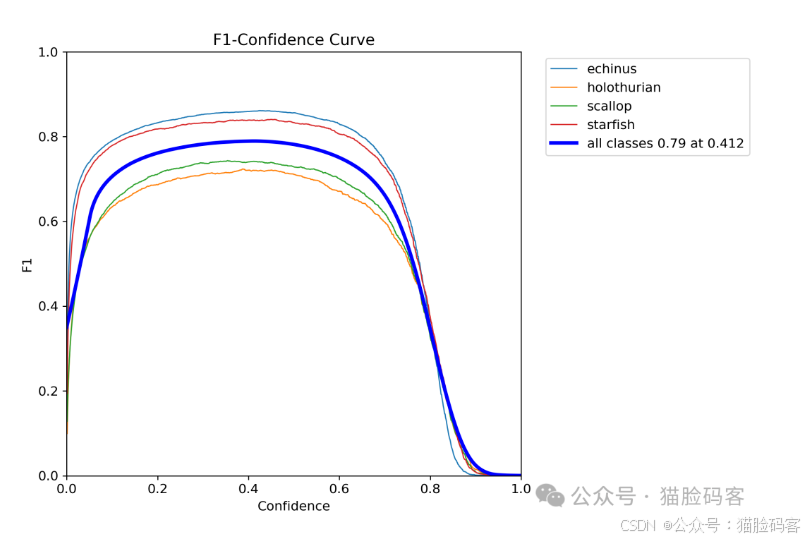
本文选取的评估指标包括综合精确率Precision和召回率Recall的F1-Score、平均精度均值mAP、计算量GFLOPs和权重大小Model Size等。mAP表示IoU阈值取0.5时的值。具体计算公式如下。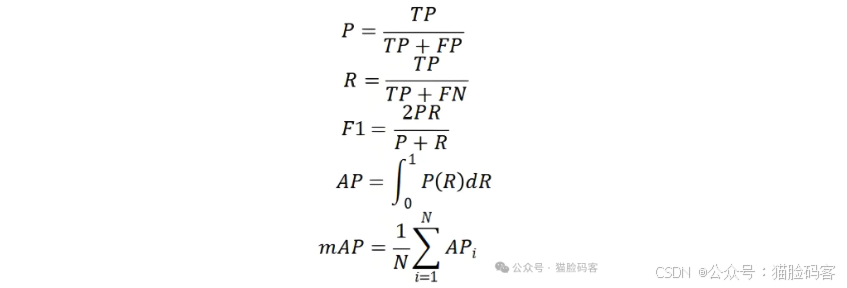
式中:TP为真正例,FP为假正例,FN为假负例,AP为平均精度,P为精确率,R为召回率。
5、实验环境
本实验的环境在Window操作系统上进行,采用的深度学习框架为Pytorch 2.6.0+126,编程语言为Python 3.10.0,CUDA版本12.6,GPU为NVIDIA GeForce RTX 4060,显存为8GB。在模型训练过程中,模型的批处理大小BatchSize设为32,总次数Epochs设为50,初始学习率被设置为0.01,动量参数因子为0.937,优化器权重衰减系数设为0.0005,以使其更快收敛并获得更好的性能。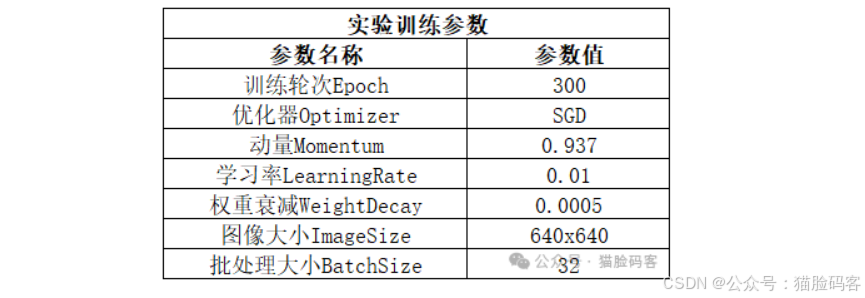
6、训练脚本
# train.py
from ultralytics import YOLO
if __name__ == '__main__':
# 初始训练
model = YOLO(r"yolov11n.yaml")
model.load("yolo11n.pt")
results = model.train(data=r"data.yaml",
epochs=50,
imgsz=640,
batch=32,
workers=4,
device=0,
name="train")
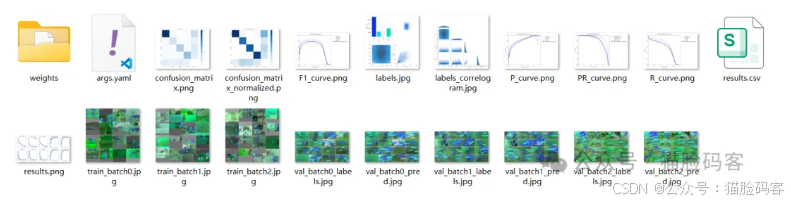
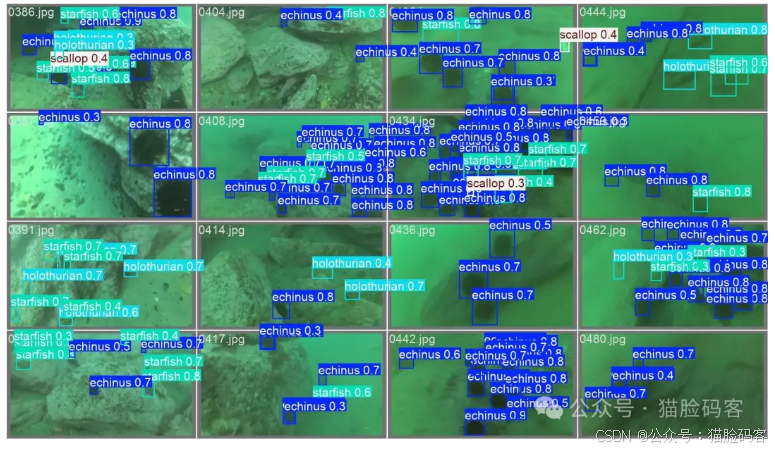
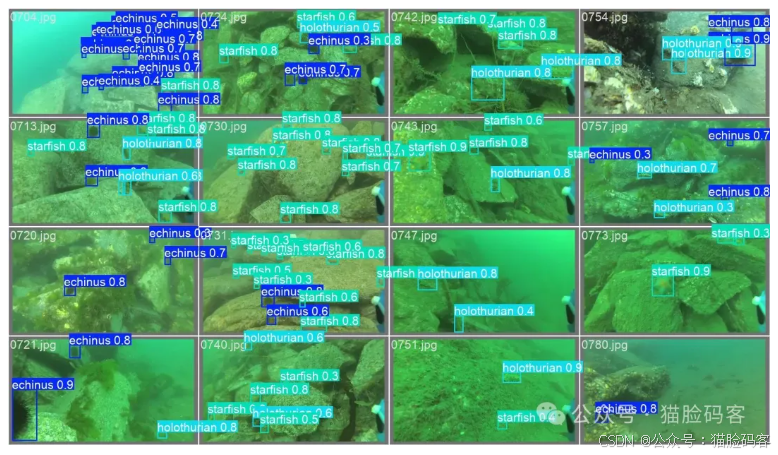
7、实验结果
8、系统实现
YOLO目标检测系统主要包括登录页面和主页面,其中主页面集成了三大核心检测功能,各功能操作便捷、检测高效,具体介绍如下:
登录页面:作为系统入口,用户需输入正确的账号密码完成登录,验证通过后方可进入主页面使用各项检测功能,保障系统使用安全性,防止未授权访问。
主页面:为核心操作区域,集中展示图片检测、视频检测、摄像头实时检测三大功能入口,界面简洁直观,方便用户快速找到所需功能,后续各项检测操作均在主页面内完成。
✅ 图片检测:支持单张图片输入检测,用户上传图片后,YOLO模型将快速对图像进行分析,精准识别图像中的各类目标,自动在图像中框选目标位置,并同步返回检测框坐标及目标类别信息,让检测结果直观可见,适用于单帧图像的快速目标识别场景。
✅ 视频检测:支持各类常见格式视频文件输入,检测过程中,YOLO模型会对视频中的每一帧进行逐帧分析、精准识别,在每帧画面中标记出检测到的目标,最终可输出带有目标框的完整视频文件,也可进行实时画面展示,广泛应用于视频监控、动态场景分析等需求场景。
✅ 摄像头实时检测:支持连接USB摄像头,实现实时目标监测功能。YOLO模型可实时捕捉摄像头传输的视频流,同步进行目标检测与识别,即时在画面中显示检测结果,提供快速、精准的即时反馈,适用于安防监控、无人驾驶、智能交通等对实时性要求较高的应用场景。
此外,系统所有检测功能均支持deepseek ai对检测结果进行AI分析,可进一步挖掘检测数据的深层信息,提升检测结果的实用性和解读效率,为用户提供更全面的检测服务。
登录界面
!
主界面

9、应用场景
基于深度学习+AI的水下目标检测与预警系统,聚焦’echinus’(海胆)、‘holothurian’(海参)、‘scallop’(扇贝)、‘starfish’(海星)四类核心目标,依托水下视频监控全时段值守、覆盖范围广的优势,结合AI智能分析可精准捕捉四类目标形态特征、运动轨迹与水下杂物、水生植物差异、穿透水质浑浊、光照不足等复杂环境干扰的特性,搭配深度学习算法的高效识别、精准分类与实时预警能力,广泛应用于各类水下场景的规范化管理、生态保护及效益提升场景:水产养殖池可精准识别养殖区域内四类目标的分布密度、生长状态,精准统计各类目标数量、定位异常聚集区域,破解传统人工潜水监测范围有限、易遗漏、目标识别准确率低、养殖隐患难以提前发现的痛点;海洋保护区可实现辖区水域全域无死角监测,快速定位四类目标的分布范围、活动规律,同步推送目标异常变动、过度聚集等预警信息至生态管护人员,助力及时采取干预措施,防范因目标分布失衡、过度捕捞导致的海洋生态破坏、生物多样性下降等问题;水下施工区域可精准识别四类目标与施工障碍物、废弃杂物的差异,实时捕捉目标靠近施工区域的动态,为水下施工安全防控提供精准依据,弥补传统水下施工监测人工成本高、视野受限、隐患发现不及时的短板。
此外,在近海海域等监测范围广、水下环境复杂、人工监测难度大的区域,可依托水下机器人灵活巡航、全天候作业的优势,精准识别不同海域四类目标的分布特征、数量变化,实时跟踪目标活动轨迹、生长状态,同步推送目标异常预警与管护指引,弥补人工监测盲区、降低水下监测与生态管护成本;在海洋资源勘探场景中,可快速区分四类目标与水下礁石、沉积物等干扰因素,精准定位目标富集区域,同步推送勘探数据与资源分布建议,助力勘探人员高效开展资源调查,提升海洋资源勘探效率与精准度,避免因目标识别偏差导致的资源遗漏、勘探成本浪费;在水产养殖效益提升场景中,可通过监测养殖区域内四类目标的生长规律、分布变化,精准定位养殖隐患、产量提升空间,同步推送养殖优化建议与病害防控指引,助力养殖户规范养殖管理、提升养殖产量与品质,避免因目标监测不及时导致的养殖损耗、病害传播等问题;在海洋生态保护场景中,可汇总分析不同海域、不同时段四类目标的分布规律、数量变动趋势,为生态保护政策制定、管护措施优化、生物多样性保护提供数据支撑,推动海洋生态管护向精细化、智能化转型。该系统全方位满足各类水下场景下四类目标的精准检测、分类识别、实时预警与规范管护需求,破解传统水下目标监测识别不准、分类模糊、异常变动发现不及时、适配复杂水下环境能力弱的痛点,为各类水下场景的规范化管理、生态精准保护、效益提升、成本降低提供智能化科技支撑,显著提升水下监测效能与综合管理水平。
10、源码获取(网盘地址)
[猫脸码客:catcode2020]

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐



 9
9 0
0- 0



 已为社区贡献11条内容
已为社区贡献11条内容

所有评论(0)