德思特干货 | GNSS时间体系梳理与关键问题应对
在卫星导航(GNSS)领域,"时间"不仅仅是一个维度,它更是定位的本质。从本质上讲,GNSS接收机解算位置的过程,实际上是一个处理各种微小时间差的过程。本文将深入探讨全球参考时间体系、导航系统专有时标以及在工程实践中如何处理这些复杂的时间关系。
一、全球时间参考体系:物理定义与演进
理解GNSS时间,首先要理解地球自转与原子能级跳动这两套截然不同的时间逻辑。
1、物理时间的双重属性
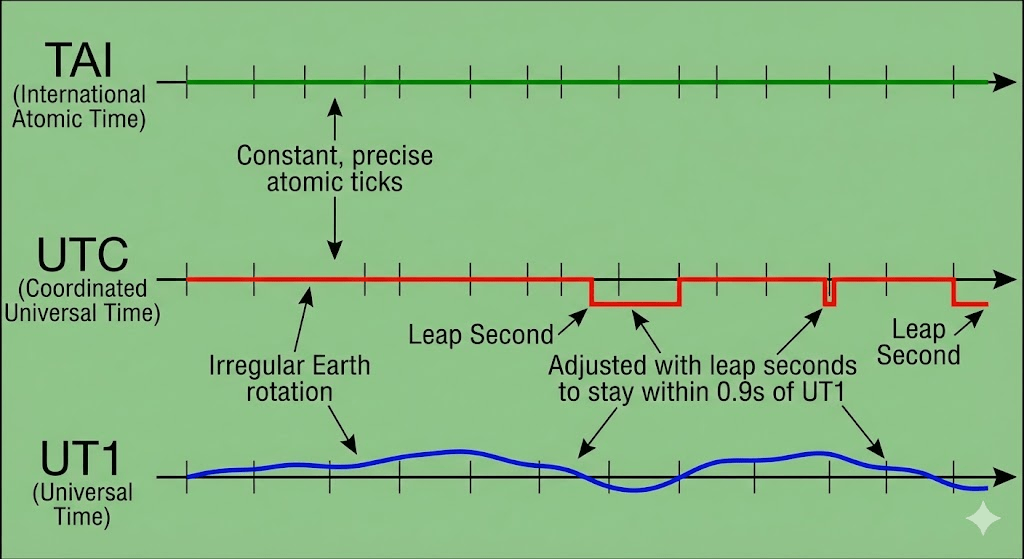
- UT1(世界时):这是一种基于天文观测的时间体系,定义为地球自转的角度。然而,由于月球潮汐摩擦、地核角动量交换以及季节性大气变化,地球的自转速率并不均匀。这意味着UT1是一种"非均匀"的时间,无法直接作为精密物理计算的频率基准。
- TAI(国际原子时):为了获得均匀的时间,科学家利用铯-133原子能级跃迁的稳定性定义了"SI秒"。TAI是由分布在全球各地的400多台原子钟通过加权平均算法(ALGOS)产生的。它极其稳定,是现代科技的物理底层基准。
2、UTC(协调世界时)的阶梯式拟合
UTC是我们日常生活中使用的标准时间。它的核心逻辑是:频率上追随TAI,相位上拟合UT1。
- 闰秒机制:由于TAI走得太准,而地球自转(UT1)总体趋于变慢,两者之间的偏差会不断累积。当偏差接近0.9秒时,BIPM会宣布在6月30日或12月31日深夜插入一秒,即"闰秒"。
- 取消闰秒的趋势:由于闰秒对电信、金融和导航系统的连续性构成了巨大挑战,2022年国际计量大会已通过决议,计划在2035年前停止或放宽闰秒调整。
总的来看,如果让 TAI 一直走,让 UT1 随性走,久而久之,原子钟显示正午时,太阳可能还在地平线下(极端情况)。为了让时间既精准又不违背自然规律,UTC 诞生了。UTC 的秒长和 TAI 一致,但如果它和 UT1(自然时间)的差距快要超过 0.9秒 时,UTC 就会人为地增加或减少 1 秒。这就是“闰秒”(leap second)的由来。
UTC阶梯式拟合
二、GNSS领域中时间的重要性
1、时间精度与空间偏差
GNSS测距的基本公式为d=c*△T。其中光速c约为30万 m/s。这意味着:
- 1毫秒(ms)误差→300公里偏差
- 1微秒(μs)误差→300米偏差
- 1纳秒(ns)误差→0.3米偏差
因此,为了实现亚米级/厘米级的定位,卫星上的原子钟(铷钟、氢钟等)必须维持极高的频率稳定性,且接收机必须能够精确解算时间。
2、接收机解算中的"第四维"
在三维空间中定位通常需要3个参数(x, y, z),三个未知数需要三个方程求解,理论需要三颗卫星与待测物的距离差就能解出坐标,但在GNSS中,由于三颗卫星之间的时间无法确保完全同步,我们必须同时解算第4个参数:接收机钟差(dtr) 。
标准的伪距方程为:

其中dts为卫星钟差(由导航电文给出), dtr为接收机本地廉价晶振与系统时的偏差。这就是为什么我们要解算位置至少需要4颗卫星的原因——多出的那颗卫星用于锁定时间。
三、四大导航系统时间的定义
为了避免UTC闰秒带来的系统中断,各大导航系统都定义了自己的连续时标(System Time)。
1、GPS系统时 (GPST)
- 定义:由GPS控制部分(CS)维护的原子时标。
- 基准:起始于1980年1月6日00:00:00 UTC。
- 特性:连续计数,不引入闰秒。
- 关系:
- GPST = UTC + 18s(截至2026年,他是动态跟随UTC的,UTC最近的一次闰秒是在2017年1月1日。但2022 年,第 27 届国际计量大会(CGPM)已经通过决议,最迟在 2035 年取消闰秒,因此可能这样将成为一个固定的数字)
- GPST = TAI - 19 s(与时间无关)
2、北斗系统时 (BDT)
- 定义:由北斗系统地面段维护的连续原子时标。
- 基准:起始于2006年1月1日00:00:00 UTC。
- 特性:不引入闰秒,因为基准时间起点的关系,与GPST存在14秒的固定偏移(期间发生的闰秒)。在底层的物理实现和坐标参考系上(GPS 坐标系(WGS-84) 与 北斗坐标系(CGCS2000) ),两者还存在约 1.356 秒的微观系统偏差
- 关系:
- BDT = UTC + 4s(截至2026年)
- BDT=TAI-33s(与时间无关)
3、GLONASS系统时 (GLONASST)
- 定义:基于俄罗斯国家时间参考标准UTC(SU)。
- 基准:与UTC(SU)保持同步。
- 特性:有闰秒。由于跟随UTC,其时间在闰秒发生时刻会产生1秒的跳变。
- 偏差:由于莫斯科位于东三区,GLONASST与UTC存在3小时的固定时差。
4、Galileo系统时 (GST)
- 定义:由Galileo控制中心生成的连续原子时标。
- 基准:GST与国际原子时(TAI)保持一致
- 起始历元:1999年8月22日00:00:00 UTC。
- 特性:连续计数,不引入闰秒。

四大导航系统时间对比表
四、GNSS时间的常用表述与转换逻辑
在数据处理(如RINEX格式)和算法开发中,我们需要在不同表达方式间频繁转换。
1、历法计数法
- MJD(简化儒略日):JD是从公元前 4713 年 1 月 1 日正午开始的连续天数,MJD是为了减少位数而定义的(MJD = JD - 2400000.5)。在轨道动力学积分中,MJD是计算行星位置的标准自变量。
- DOY(年积日):从当年1月1日开始的天数,例如2026年2月1日是DOY 32。
2、GNSS专用表达法:Week + SOW
这是工程实现中最常用的方法:
- Week(周):从各系统的起始历元开始计周。GPS周在达到1024或8192(取决于位数)时会出现"周翻转"。
- SOW(周内秒):从每周日00:00:00开始累积的秒数,范围为0到604800秒。
3、周翻转
周翻转是指由于导航电文中用于表示"周"的位数限制,当达到最大值后重新从0开始计数的现象。
(1)GPS的周翻转 (1024周周期)
- 机制:传统LNAV电文使用10位(Bit)表示周数。
- 周期:210=4096周(约19.7年)。
- 历史:
- 第一次翻转:1999年8月21日
- 第二次翻转:2019年4月6日
- 未来第三次翻转:2038年11月20日
- 现状:新型CNAV电文已升级为13位,周期延长至213=8192周,约157.1年。
(2)北斗系统(BDS)的周翻转 (8192周周期)
- 位数设计:
- 北斗二号(BDS-2):采用13位WN计数。
- 北斗三号(BDS-3):在B-CNAV电文中同样保持高位数支持。
- 翻转周期:213=8192周,约157.1年。
- 现状:北斗起始于2006年,第一次周翻转将发生在2163年左右。
(3)GLONASS的特殊情况:无周翻转但有"四年周期"
- 机制:GLONASS不采用"周+周内秒"计数。其时间由"天数(Nk)"和"四年周期索引(Na)"组成。
- 核心风险:
- 闰秒冲击:GLONASS是唯一包含闰秒的导航系统。在闰秒调整时刻,接收机若未处理好"60秒"的情况,会导致授时跳变。
- 四年周期(Na):其年份索引每4年循环一次。虽然不是"翻转",但老旧设备如果不通过其他渠道获知绝对年份,可能会在4年跨度后产生日期判定错误。
(4)Galileo的周翻转 (4096周周期)
- 机制:Galileo使用12位表示周数。
- 翻转周期:212= 4096周(约78.5年)。
- 现状:起始于1999年,预计在2078年发生首次翻转。
五、总结与展望
GNSS技术体系中,时间是所有测量的原点,理解UT1与TAI的矛盾催生了UTC,而UTC的不连续性又促使各导航系统建立了独立的系统时。而未来随着量子技术的成熟,GNSS时间系统正面临从"微波原子钟"向"量子时频体系"的历史性跨越。
1、星载量子钟(Quantum Clocks)
目前的GNSS卫星主要搭载铷原子钟或氢原子钟。
- 精度飞跃:未来的量子光学钟(Optical Clocks)可以将稳定度提高2-3个数量级(达到10-18甚至更低)。
- 影响:更高的时钟稳定性意味着可以减少星地同步的频率,即使在地面站失效的情况下,卫星也能长时间维持极高精度的自主运行(自主导航能力)。
2、量子纠缠时间同步(QETS)
- 原理:利用量子纠缠态的非定域性实现星间、星地的时间同步。
- 影响:
- 消除链路误差:传统微波同步受电离层和大气对流层延迟影响,量子同步理论上可以实现近乎实时的、不受路径干扰的高精度对时。
- 安全性:量子同步具有天然的防窃听和抗欺骗特性,能够极大增强GNSS时间信号的安全等级。
3、重新定义UTC与"无闰秒"时代
- 技术趋势:2022年国际计量大会(CGPM)已决定最迟于2035年取消闰秒。
- 系统演进:未来GNSS时间定义可能趋向于完全统一的、基于量子基准的连续时间轴,消除GLONASS等系统的复杂闰秒处理逻辑。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐



 8
8 0
0- 0



 已为社区贡献4条内容
已为社区贡献4条内容

所有评论(0)