效率飙升61%!南洋理工&南科大新方法,让无人机边飞边“转头”,探索又快又准
「把激光雷达“用活”」
目录
未知环境下的无人机自主探索,核心矛盾始终是探索效率与定位精度的博弈。一方面,要快速覆盖未知区域、构建完整三维地图;另一方面,复杂几何环境中,激光雷达惯性里程计(LIO)易漂移,定位失效会直接导致任务失败。
传统固定视角激光雷达无人机,感知范围与机体姿态强绑定,扩大覆盖需频繁机动,既低效又加剧定位风险;而现有可旋转激光雷达方案,仅把扫描当固定流程,未将其与探索进度、定位需求深度绑定。
南洋理工大学团队联合南科大等团队提出的FU-MPC(前沿与不确定性感知模型预测控制),正是瞄准这一空白,通过硬件重构与分层控制,让激光雷达旋转成为可实时优化的“决策变量”,为无人机高效精准探索提供了新范式。
01 硬件突破:把扫描权从机体“解放”
FU-MPC的核心前提,是搭建可独立驱动的旋转激光雷达无人机平台,打破传统感知与机体的强耦合。硬件设计的关键,在于实现扫描运动与飞行动力学的解耦。
平台搭载独立电机驱动的激光雷达,可绕轴360°旋转,无需无人机额外平移或偏航;同时采用STM32微控制器构建时序中枢,统一同步激光雷达、IMU、编码器数据,保证多传感器融合精度。这种设计让激光雷达旋转速度与方向,不再是固定参数,而是可实时调整的控制输入——无人机飞自己的,激光雷达“看”自己的,感知自由度从3个(机体姿态)提升至4个(加雷达旋转)。
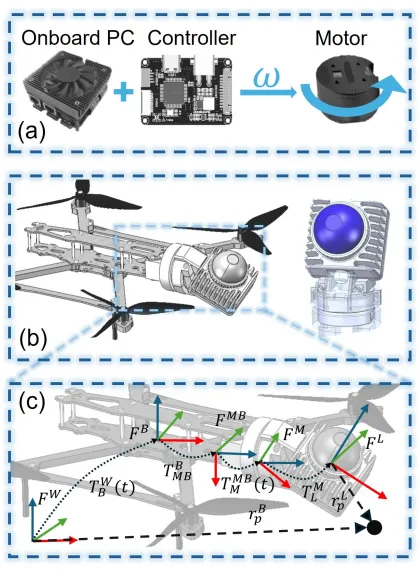
图| 主动旋转激光雷达无人机硬件系统设计
这一硬件改动看似简单,实则直击行业痛点:传统无人机想探测侧方或下方未知区域,必须调整航向或高度,既增加飞行时间,又让LIO在几何退化区域(如狭长隧道)易因运动模糊累积误差;而独立旋转雷达可定向扫描关键区域,减少无效机动,从硬件层面平衡覆盖范围与定位稳定性。
02 分层框架:全局规划+局部扫描,双管齐下
FU-MPC采用分层探索框架,上层负责“去哪探索”,下层解决“怎么扫”,全局统筹与局部优化结合,兼顾长期效率与短期精度。

图| FU-MPC 系统总览:分层探索框架
(一)全局规划:拓扑感知的视点序列生成
传统全局规划多以欧氏距离选探索目标,易生成需大角度转向、频繁升降的低效路径,未考虑复杂3D环境的可达性与机动成本。FU-MPC的全局规划,先对前沿(已知/未知区域边界) 聚类,筛选代表性观测视点,再用拓扑感知代价函数排序,核心是让路径“好走、高效”。
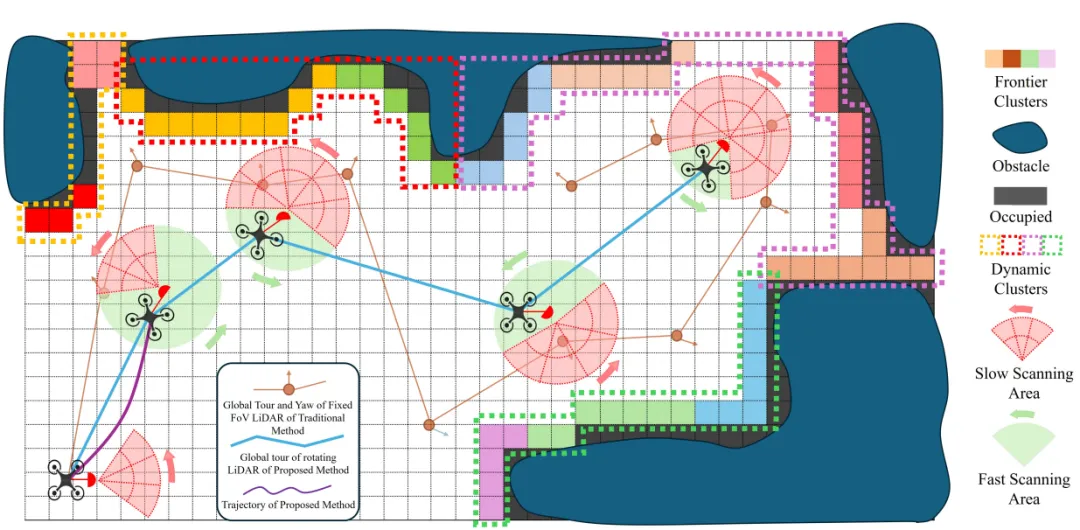
图| 全局规划流程:前沿聚类与拓扑路径对比
具体分为两步:
- 视点采样与动态聚类:对每个前沿簇,估算中心与法向,仅在法向半球采样候选视点,保证观测有效性;再合并空间重叠的前沿簇,减少目标冗余,把数百个前沿简化为少量核心视点。
- 拓扑感知排序:代价函数不仅算路径长度,还加入可达性、垂直机动负担、航向一致性,公式简化为:
( 为最大飞行速度,
、
为路径点水平、高度坐标)
同时加入航向一致性项,优先选与当前飞行方向对齐的目标,减少急转。最终用LKH求解器解算开放旅行商问题,生成最优视点序列
(二)局部扫描:FU-MPC预测控制优化
全局规划给出飞行轨迹后,FU-MPC作为局部扫描控制器,在预测时域内实时优化激光雷达旋转,同时最大化前沿探索收益、最小化定位不确定性。核心是把“扫描动作”与两个关键目标绑定,而非固定转速。
图| 建筑场景扫描策略自适应
1. 预测扫描:提前预判观测范围
FU-MPC先基于当前雷达角度、角速度,及未来飞行轨迹,预测后续扫描状态,公式如下:
(
为雷达角度,
为角速度,
为步长)
结合机体姿态,算出雷达主扫描方向,为后续评估打基础。
2. 双目标优化:效率与精度平衡
控制器同时优化两个核心指标:
-
前沿感知效用:优先扫描含大量未知区域的方向,用距离、簇密度加权计算收益,公式简化为:
(为基准收益,
为可见前沿收益)
- 定位不确定性:用费雪信息矩阵评估局部几何约束强度, 矩阵迹越小, 定位越准,公式为:
,(
为费雪信息矩阵)
最终优化目标是加权求和最小化,同时限制雷达转速、加速度, 保证硬件可行:
(、
、
为权重,
为角加速度) 为满足机载实时性 (控制周期 0.1 秒), 采用轻量级分段线性代理模型,离线预计算不确定性表, 在线插值查询, 避免复杂矩阵运算。
03 实验验证:效率精度双领先
团队在洞穴、空间迷宫、熔岩管三大仿真场景,及室外停车场、建筑环境开展实测,对比EPIC、FUEL等主流方法,FU-MPC在效率、定位精度上均显著领先。
(一)仿真结果:效率提升37%-61%

图| 基准算法对比:探索时间与轨迹长度
- 空间迷宫:FU-MPC耗时112.98秒,比EPIC快36.8%,轨迹缩短48.7%;
- 熔岩管(狭长隧道):EPIC需频繁偏航,耗时359.91秒,FU-MPC仅138.11秒,提升61.6%;
- 定位精度:熔岩管场景中,FU-MPC的绝对位姿误差(APE)RMSE仅0.191米,EPIC达0.664米;洞穴场景中EPIC因漂移RMSE达58.987米,FU-MPC仅1.03米。

图| 三大场景探索进度与无人机轨迹
(二)消融实验:动态扫描最优
对比固定30°/s、100°/s、360°/s转速,FU-MPC动态扫描的RMSE最低(0.068米),轨迹最短(214.94米)。低速扫描精度高但效率低,高速扫描效率高但易漂移,FU-MPC完美破解这一权衡。

图| 激光转速消融:定位误差与效率对比
(三)实测表现:实时性拉满
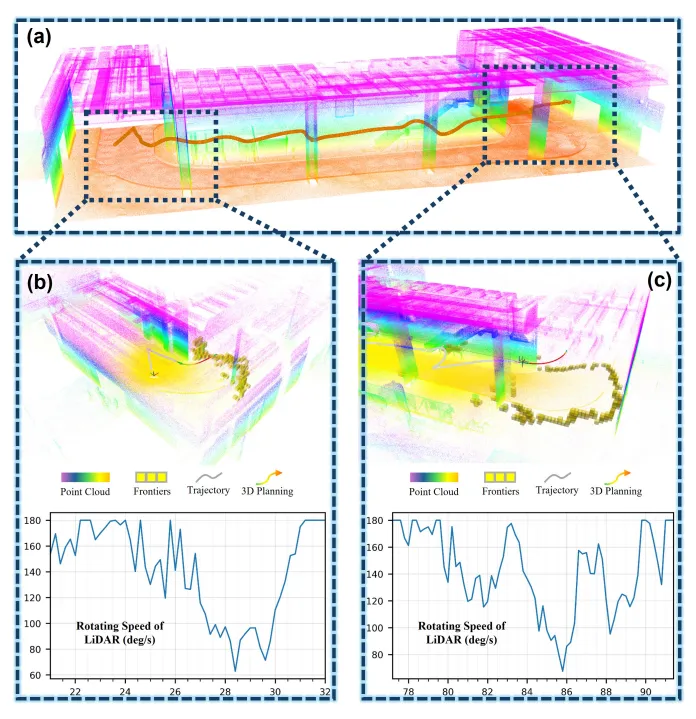
室外复杂场景中,无人机在拐角处自动降速扫描、过弯后提速,适配环境复杂度;机载CPU占用率仅28.98%,全局规划占17.25%,局部扫描仅1.88%,算力开销极低。

图| 室外场景实测试验:第一 / 第三人称视角
04 核心创新与行业启示
FU-MPC的价值,不止是性能提升,更在于理念革新:把激光雷达从“被动传感器”升级为“主动决策单元”。过往研究多聚焦无人机“去哪飞”,忽视“怎么扫”,而FU-MPC证明,扫描策略与飞行轨迹同等重要,甚至更影响探索上限。
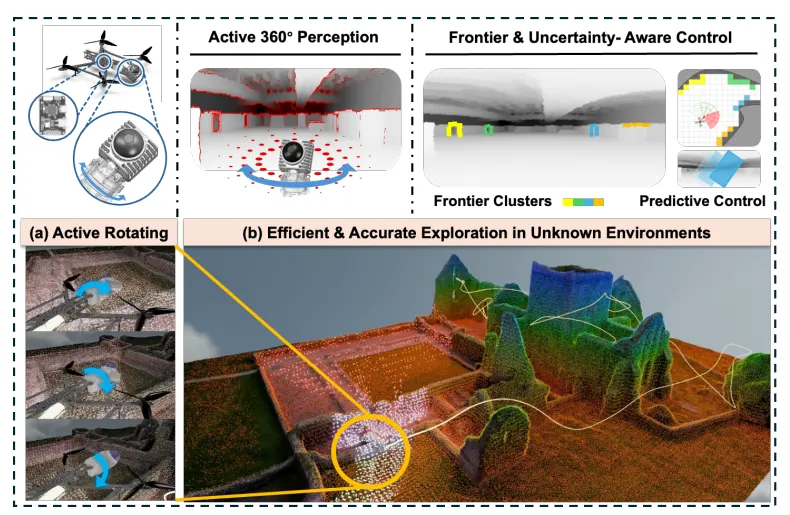
图| FU-MPC 核心特性:主动旋转激光雷达与高效精准探索
其分层框架也为行业提供可复用思路:全局层解决“路径最优”,局部层解决“感知最优”,用轻量化模型平衡精度与算力,适配无人机机载资源限制。而硬件层面,独立旋转雷达的设计门槛不高,易落地,有望成为下一代探索无人机标配。
不过,FU-MPC仍有局限:当前仅考虑静态环境,未应对动态障碍物;前沿聚类依赖点云质量,稀疏场景易失效;权重参数需手动调优,未引入自适应机制。这些都是后续可突破的方向。
05 总结
未知环境无人机探索,从来不是“快”与“准”二选一,而是如何兼得。FU-MPC通过硬件解耦扫描与飞行、拓扑感知全局规划、双目标预测控制,让激光雷达“该快则快、该慢则慢”,既快速覆盖未知区域,又保证定位稳定。

这项工作的意义,在于重新定义无人机自主探索的“感知-控制”边界:感知不再是飞行的附属,而是与飞行并列的核心决策环节。随着硬件成本下降、算法优化,这类“感知可控”的探索框架,有望在灾后搜救、地下勘探、工业巡检等场景落地,让无人机真正成为未知环境的“全能探索者”。
Ref
论文标题:FU-MPC: Frontier- and Uncertainty-Aware Model Predictive Controlfor Efficient and Accurate UAV Exploration with Motorized LiDAR
论文链接:https://arxiv.org/pdf/2605.14920
项目链接:https://kafeiyin00.github.io/FU-MPC/

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐
 8
8 0
0- 0



 已为社区贡献58条内容
已为社区贡献58条内容

所有评论(0)