基于高通跃龙IQ-9100端侧多模态大模型赋能具身智能交互系统(1): 从场景理解到VLM部署
摘要
当机器人具备了感知(视觉+传感器融合)、导航(SLAM+Nav2)、操作(视觉抓取)三大基础能力后,如何让它真正“理解”人类意图并自主完成复杂任务?答案是端侧多模态大模型。本文以高通跃龙IQ-9100(100 TOPS NPU,可运行Llama 2 7B @ 22 tok/s)为平台,实战部署视觉语言模型(VLM)实现场景理解与视觉问答,为具身智能体构建“看懂环境”的能力。
📌 本系列共两篇,本文为第一篇,聚焦背景、系统架构和VLM部署;第二篇将介绍LLM任务规划、语音交互及完整系统集成。
1. 为什么具身智能需要端侧大模型
1.1 从规则驱动到理解驱动
传统机器人(规则驱动):
用户:“把桌子上的红色杯子放到厨房”
系统:无法理解 → 需预编程每种指令
流程:IF command == "move_cup" THEN execute_predefined_sequence()
问题:无法处理开放指令,无法理解新场景
具身智能体(大模型驱动):
用户:“把桌子上的红色杯子放到厨房”
系统:LLM分解任务:
1. 视觉搜索 → 在当前场景中找到“红色杯子”
2. 确认位置 → 在“桌子上”(坐标验证)
3. 导航到桌子 → Nav2 规划路径
4. 抓取杯子 → 视觉引导抓取
5. 导航到厨房 → Nav2 规划路径
6. 放置杯子 → 选择合适位置放下
7. 确认完成 → “好的,红色杯子已经放到厨房了”
1.2 端侧 vs 云端大模型
| 维度 | 端侧部署 (IQ-9100) | 云端部署 |
|---|---|---|
| 延迟 | 首token约1.2s | 网络延迟+推理约2-5s |
| 隐私 | 数据不出设备 | 视频/语音上传云端 |
| 可靠性 | 离线可用 | 依赖网络 |
| 成本 | 一次性硬件成本 | 持续API调用费用 |
| 模型大小 | 7B-13B(受限内存) | 无限制(GPT-4等) |
| 推理速度 | ~22 tok/s (7B) | ~50-100 tok/s |
| 适用场景 | 机器人/工业/安防 | 对话机器人/客服 |
1.3 IQ-9100平台介绍
高通跃龙IQ-9100是高通打造的高性能工业级平台,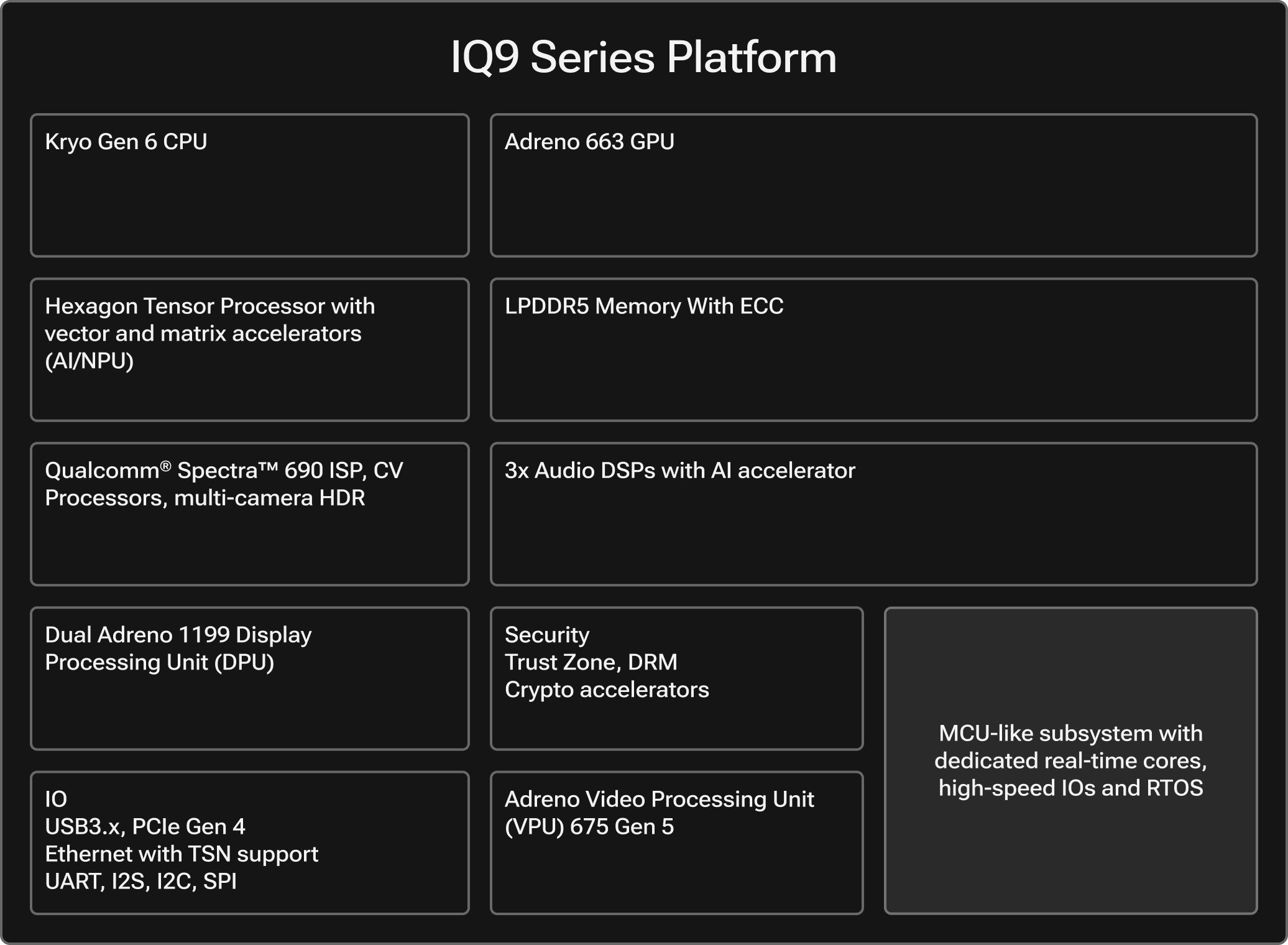
可以完美应用到具身智能机器人场景。
- 在《基于高通跃龙IQ-9100打造具身智能机器人多传感器融合感知系统》文中,我们基于高通跃龙IQ-9100平台完成了具身智能机器人的硬件选型,并利用其强大的100 TOPS NPU实现了多摄像头AI感知系统。
- 在《基于高通跃龙IQ-9100打造具身智能机器人视觉SLAM与自主导航系统》》文中,我们基于高通跃龙IQ-9100平台搭建了一套完整的视觉SLAM建图 + 自主导航 + 动态避障系统。
- 在《基于高通跃龙IQ-9100打造具身智能机器人视觉引导抓取系统》》中,我们基于高通跃龙IQ-9100工业机器人平台,打造具身智能机器人场景下一套完整的“眼-手”协作系统。
- 本文(系列),我们基于高通跃龙IQ-9100工业机器人平台,利用端侧多模态大模型赋能具身智能交互系统。
1.3 系统架构
┌─────────────────────────────────────────────────────────────────────┐
│ IQ-9100 具身智能交互系统 │
│ │
│ ┌─────────────────── 输入层 ───────────────────────────────────┐ │
│ │ │ │
│ │ ┌─────────┐ ┌──────────┐ ┌──────────┐ ┌────────────┐ │ │
│ │ │ 语音输入 │ │ 文本输入 │ │ 摄像头 │ │ 触摸屏 │ │ │
│ │ │ 麦克风 │ │ 终端/APP │ │ 实时画面 │ │ 手势识别 │ │ │
│ │ └────┬────┘ └────┬─────┘ └────┬─────┘ └─────┬──────┘ │ │
│ └───────┼────────────┼─────────────┼──────────────┼────────────┘ │
│ │ │ │ │ │
│ ┌───────▼────────────▼─────────────▼──────────────▼────────────┐ │
│ │ 多模态理解层 (NPU TP0 + TP1) │ │
│ │ │ │
│ │ ┌─────────────┐ ┌──────────────┐ ┌─────────────────────┐ │ │
│ │ │ ASR 语音识别 │ │ VLM 视觉 │ │ LLM 语言理解 │ │ │
│ │ │ Whisper │ │ 语言模型 │ │ Llama 2 7B │ │ │
│ │ │ (NPU) │ │ 场景描述 │ │ 意图识别+任务分解 │ │ │
│ │ └─────────────┘ └──────────────┘ └─────────────────────┘ │ │
│ └──────────────────────────┬────────────────────────────────────┘ │
│ │ │
│ ┌──────────────────────────▼───────────────────────────────────┐ │
│ │ 任务规划层 (CPU + LLM) │ │
│ │ │ │
│ │ ┌─────────────────┐ ┌──────────────┐ ┌────────────┐ │ │
│ │ │ 任务链生成 │ │ 行为树动态 │ │ 执行监控 │ │ │
│ │ │ LLM → JSON Plan │ │ 构建/修改 │ │ 异常处理 │ │ │
│ │ └─────────────────┘ └──────────────┘ └────────────┘ │ │
│ └──────────────────────────┬───────────────────────────────────┘ │
│ │ │
│ ┌──────────────────────────▼──────────────────────────────────┐ │
│ │ 技能执行层 (已有能力) │ │
│ │ │ │
│ │ ┌──────┐ ┌──────┐ ┌──────┐ ┌──────┐ ┌──────┐ ┌────────┐ │ │
│ │ │ 导航 │ │ 抓取 │ │ 放置 │ │ 搜索 │ │ 跟随 │ │ 语音播 │ │ │
│ │ │ │ │ │ │ │ │ │ │ │ │ 报 │ │ │
│ │ └──────┘ └──────┘ └──────┘ └──────┘ └──────┘ └────────┘ │ │
│ └─────────────────────────────────────────────────────────────┘ │
└─────────────────────────────────────────────────────────────────────┘
系统主要包含:
- 感知层:摄像头、传感器、VLM场景理解
- 任务规划层:LLM意图识别 + 任务分解 + 行为树动态构建/修改 + 异常处理
- 技能执行层:导航、抓取、放置、搜索、跟随、语音播报等原子能力
2. 视觉语言模型(VLM)部署
2.1 模型选型
在IQ-9100的36GB内存和100 TOPS NPU上,可运行的VLM选择:
| 模型 | 参数量 | 量化后大小 | 推理速度(估) | 能力 |
|---|---|---|---|---|
| LLaVA-1.5-7B | 7B | ~4.5GB (INT4) | ~15 tok/s | 图像理解+对话 |
| MiniGPT-4 (7B) | 7B | ~4.5GB (INT4) | ~15 tok/s | 图像描述+问答 |
| Qwen-VL-Chat (7B) | 7B | ~4.5GB (INT4) | ~12 tok/s | 中文视觉对话 |
| Llama 2 7B (纯文本) | 7B | ~4.5GB (INT4) | ~22 tok/s | 任务规划/推理 |
推荐方案:VLM(场景理解) + LLM(任务规划)分离部署,按需切换使用NPU。
2.2 VLM场景理解节点(核心代码)
以下为vlm_scene_node.py的关键实现,展示如何在ROS2中集成VLM并使用NPU加速。
# ...(省略导入部分)
class VLMSceneNode(Node):
def __init__(self):
super().__init__('vlm_scene')
self.declare_parameter('model_dir', '/opt/models/llava_7b')
self.declare_parameter('max_tokens', 256)
self.declare_parameter('image_size', 336)
self.bridge = CvBridge()
self._latest_frame = None
self._lock = threading.Lock()
model_dir = self.get_parameter('model_dir').value
self._load_vlm(model_dir)
# 订阅摄像头原始图像
self.create_subscription(Image, '/camera/color/image_raw', self._image_callback, 5)
# 订阅VLM查询请求
self.create_subscription(String, '/vlm/query', self._query_callback, 10)
self.response_pub = self.create_publisher(String, '/vlm/response', 10)
self.scene_pub = self.create_publisher(String, '/scene_description', 10)
self.create_timer(5.0, self._periodic_scene_update)
self.get_logger().info('VLM Scene node initialized')
def _load_vlm(self, model_dir):
"""加载 VLM 模型"""
try:
from qnn_sdk import QNNContext
self.vision_encoder = QNNContext(
model_path=f"{model_dir}/vision_encoder_int8.ctx",
backend="http"
)
self.llm_decoder = QNNContext(
model_path=f"{model_dir}/llm_decoder_w4a16.ctx",
backend="http"
)
self.use_npu = True
self.get_logger().info('VLM loaded on NPU')
except (ImportError, FileNotFoundError):
self.use_npu = False
self.get_logger().warning('VLM NPU not available, using simulation mode')
# 回退到transformers或模拟模式
try:
from transformers import AutoTokenizer
self.tokenizer = AutoTokenizer.from_pretrained(model_dir, local_files_only=True)
except Exception:
self.tokenizer = None
def _image_callback(self, msg):
frame = self.bridge.imgmsg_to_cv2(msg, 'bgr8')
with self._lock:
self._latest_frame = frame
def _query_callback(self, msg):
query = msg.data
with self._lock:
frame = self._latest_frame.copy() if self._latest_frame is not None else None
if frame is None:
self._publish_response("无法获取摄像头画面")
return
t0 = time.perf_counter()
response = self._vlm_inference(frame, query)
latency = (time.perf_counter() - t0) * 1000
self.get_logger().info(f'VLM response ({latency:.0f}ms): "{response[:100]}"')
self._publish_response(response)
def _vlm_inference(self, frame: np.ndarray, query: str) -> str:
"""VLM推理: 图像 + 问题 → 回答"""
if self.use_npu and self.tokenizer:
return self._npu_inference(frame, query)
else:
return self._simulation_inference(frame, query)
def _npu_inference(self, frame: np.ndarray, query: str) -> str:
"""NPU加速的VLM推理"""
img_size = self.get_parameter('image_size').value
# 图像预处理(resize、归一化、标准化)
image = cv2.resize(frame, (img_size, img_size))
image = image.astype(np.float32) / 255.0
mean = np.array([0.48145466, 0.4578275, 0.40821073])
std = np.array([0.26862954, 0.26130258, 0.27577711])
image = (image - mean) / std
image = image.transpose(2, 0, 1)[np.newaxis, ...]
# 视觉编码器推理
image_features = self.vision_encoder.execute({"pixel_values": image.astype(np.float32)})
# 构造文本prompt
prompt = f"<image>\nUSER: {query}\nASSISTANT:"
input_ids = self.tokenizer.encode(prompt, return_tensors="np")
max_tokens = self.get_parameter('max_tokens').value
generated = []
for _ in range(max_tokens):
logits = self.lm_decoder.execute({
"input_ids": input_ids,
"image_features": image_features["last_hidden_state"]
})
next_token = int(np.argmax(logits[0, -1, :]))
if next_token == self.tokenizer.eos_token_id:
break
generated.append(next_token)
input_ids = np.concatenate([input_ids, np.array([[next_token]])], axis=1)
return self.tokenizer.decode(generated, skip_special_tokens=True)
def _simulation_inference(self, frame: np.ndarray, query: str) -> str:
"""模拟推理(开发/调试用)—— 基于颜色检测的简单逻辑"""
h, w = frame.shape[:2]
hsv = cv2.cvtColor(frame, cv2.COLOR_BGR2HSV)
colors_detected = []
color_ranges = {
"红色": ((0, 100, 100), (10, 255, 255)),
"蓝色": ((100, 100, 100), (130, 255, 255)),
"绿色": ((40, 100, 100), (80, 255, 255)),
"黄色": ((20, 100, 100), (40, 255, 255)),
}
for name, (lower, upper) in color_ranges.items():
mask = cv2.inRange(hsv, np.array(lower), np.array(upper))
if np.sum(mask > 0) > 500:
colors_detected.append(name)
if "在哪" in query or "找" in query or "搜索" in query:
return json.dumps({
"type": "search_result",
"found": len(colors_detected) > 0,
"objects": colors_detected,
"description": f"场景中检测到: {', '.join(colors_detected) if colors_detected else '无物体'}"
}, ensure_ascii=False)
elif "描述" in query or "看到" in query or "场景" in query:
brightness = np.mean(frame)
desc = f"当前画面分辨率{w}x{h}, 亮度{'较亮' if brightness > 128 else '较暗'}, 检测到颜色: {', '.join(colors_detected) if colors_detected else '无'}"
return desc
else:
return f"收到查询: {query}。场景分析: 检测到{len(colors_detected)}种颜色物体。"
def _periodic_scene_update(self):
"""定期更新场景描述(后台)"""
with self._lock:
frame = self._latest_frame.copy() if self._latest_frame is not None else None
if frame is None:
return
desc = self._vlm_inference(frame, "请简要描述当前场景中有什么物体")
msg = String()
msg.data = desc
self.scene_pub.publish(msg)
def _publish_response(self, text: str):
msg = String()
msg.data = text
self.response_pub.publish(msg)
def main(args=None):
rclpy.init(args=args)
node = VLMSceneNode()
rclpy.spin(node)
node.destroy_node()
rclpy.shutdown()
说明:以上代码展示了VLM节点完整实现,包括NPU推理、图像预处理、模拟回退模式以及定期场景更新。实际部署时需根据QNN SDK具体接口调整。
小结
本文(第一篇)介绍了具身智能为何需要端侧大模型,对比了端云部署差异,并详细给出了IQ-9100上VLM的部署代码。下一篇我们将继续深入LLM任务链规划、语音交互集成以及完整的系统演示,敬请期待。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐
 6
6 0
0- 0



 已为社区贡献31条内容
已为社区贡献31条内容

所有评论(0)