AmazingHand灵巧手 -【TTL串口舵机】调试教程
首先,下载“灵巧手调试.zip”压缩包,解压后可通过“使用arduio程序调试灵巧手过程(TTL舵机)”文档进行舵机ID设置、标定、校准中位及演示程序运行,或 参考官方开源代码。
成品无拆卸情况下(出厂 舵机ID设置、标定、校准中位已调试好)可以直接跳到第6点 运行“02 演示程序” 和 第7点 手部追踪。![[图片]](https://i-blog.csdnimg.cn/direct/9d9e2f9fa32c41d191c1cebf4f030131.png)
-
调试灵巧手的接线方式
一种是使用电脑运行python等上位机软件,如飞特舵机上位机或者python代码运行
一种是使用MEGA328P等单片机或自行购买的开发板或主控等
接线方式如下:
(1)python方式调试时的接线方式(只接舵机驱动板):![[图片]](https://i-blog.csdnimg.cn/direct/52aa78fd03ac4adeb23c3e2dc1cda3f1.png)
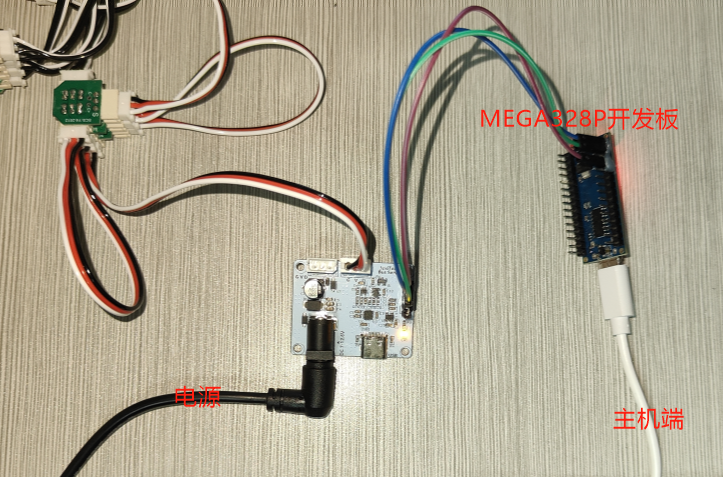
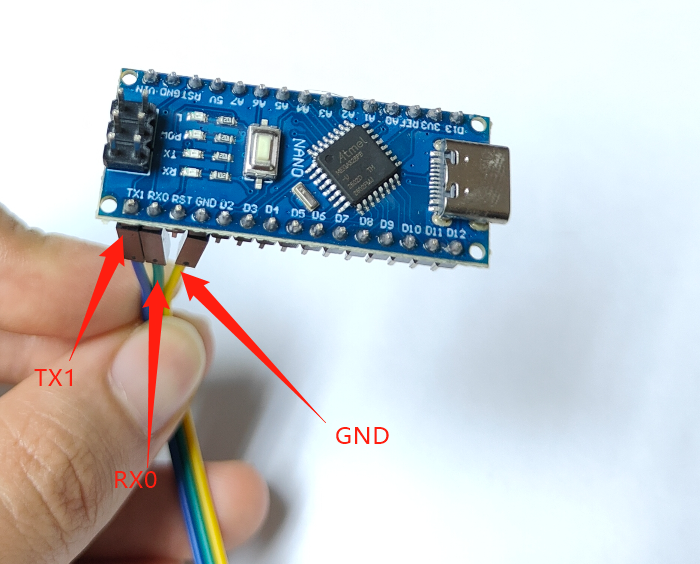
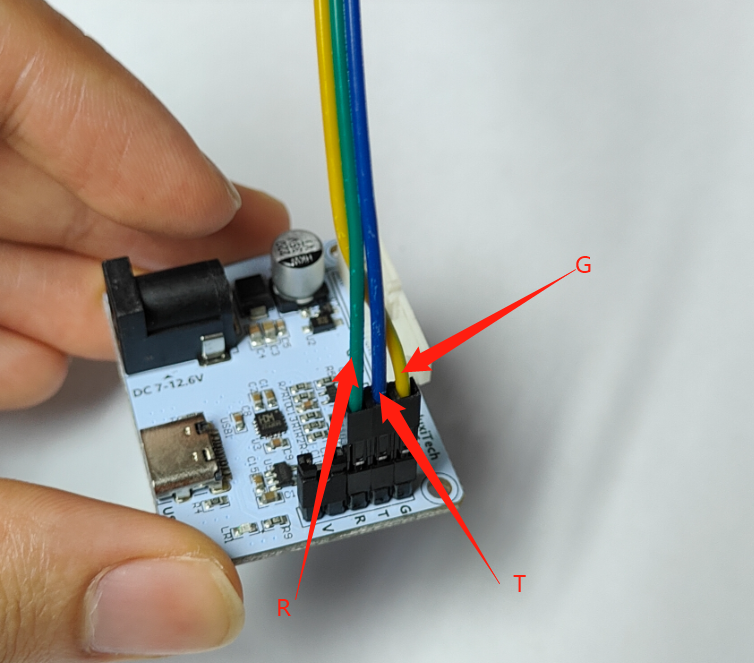
(2)MEGA328P开发板调试时的接线方式(舵机驱动板+328P开发板)(该教程里是Arduino Nano):
看清楚MEGA328P开发板的针脚位置!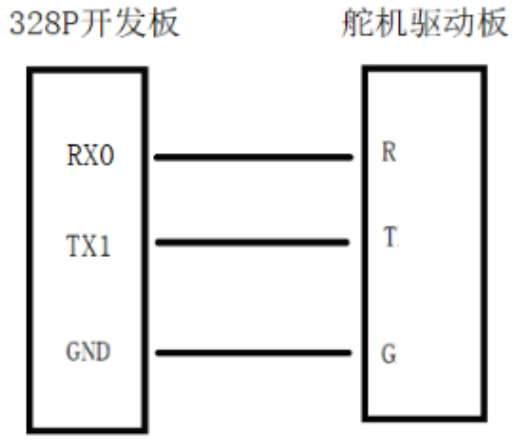
下面描述的是使用单片机的调试过程,单片机本身是会不断循环演示程序的,只需断开数据线即可停止。 -
设置舵机ID
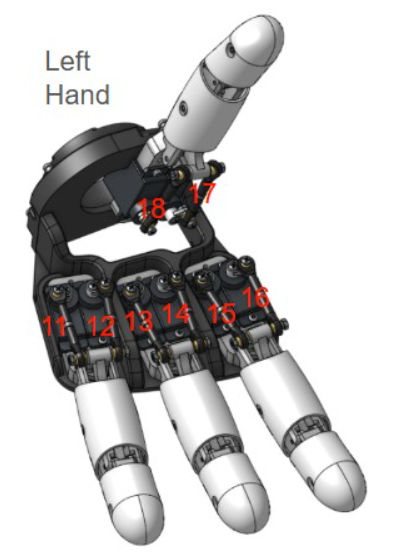
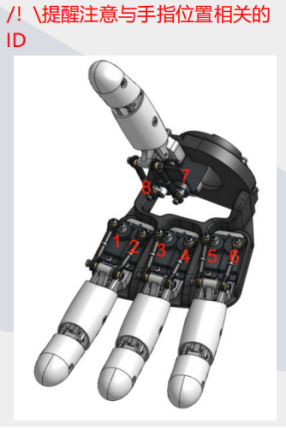
单个灵巧手共使用了8个舵机,右手 ID需要设置为1-8 ,左手 ID需要设置为11-18
中位校准 成品默认右手[451,571,451,571,451,571,451,571]左手[571,451,571,451,571,451,571,451]
1、连线:依次将单个舵机、舵机驱动板连接起来。![[图片]](https://i-blog.csdnimg.cn/direct/5685a4fc272c4c85b202fe6553c56ae9.png)
2、使用舵机厂家提供的上位机软件FD1.9.8.2进行设置
https://gitee.com/ftservo![[图片]](https://i-blog.csdnimg.cn/direct/24ec9599c5a74ecbb54eb380efc38616.png)
-
固定伺服喇叭
1、上传代码程序“安装白色伺服喇叭时使用” 到开发板中
该程序的作用:使舵机的齿轮位置处于一个大致居中的位置,后续的动作角度都是基于这个中间的位置进行的。
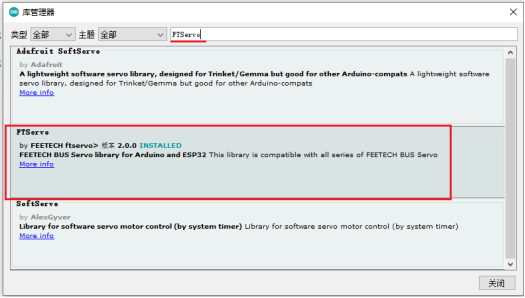
(1)自行安装软件arduino,根据自身系统参考安装教程,编译下载arduino程序的话,要先在 库管理器 里安装FTServo库、SCServo库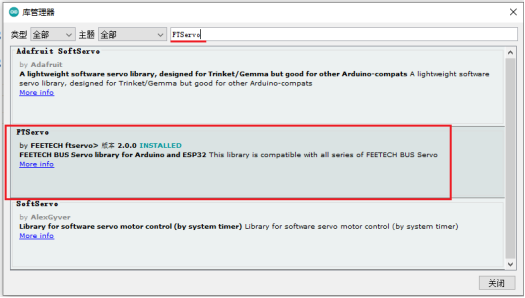
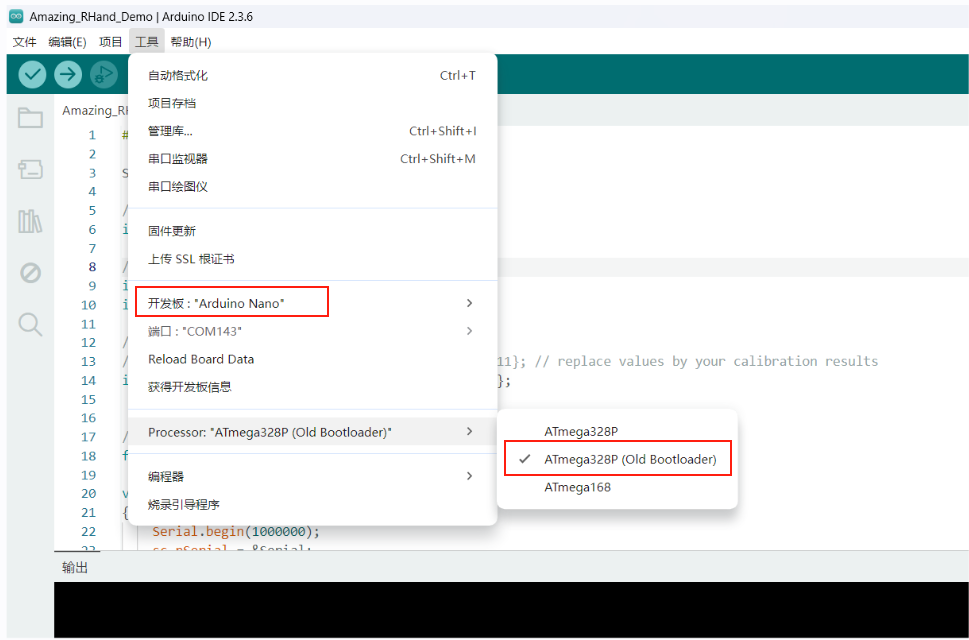
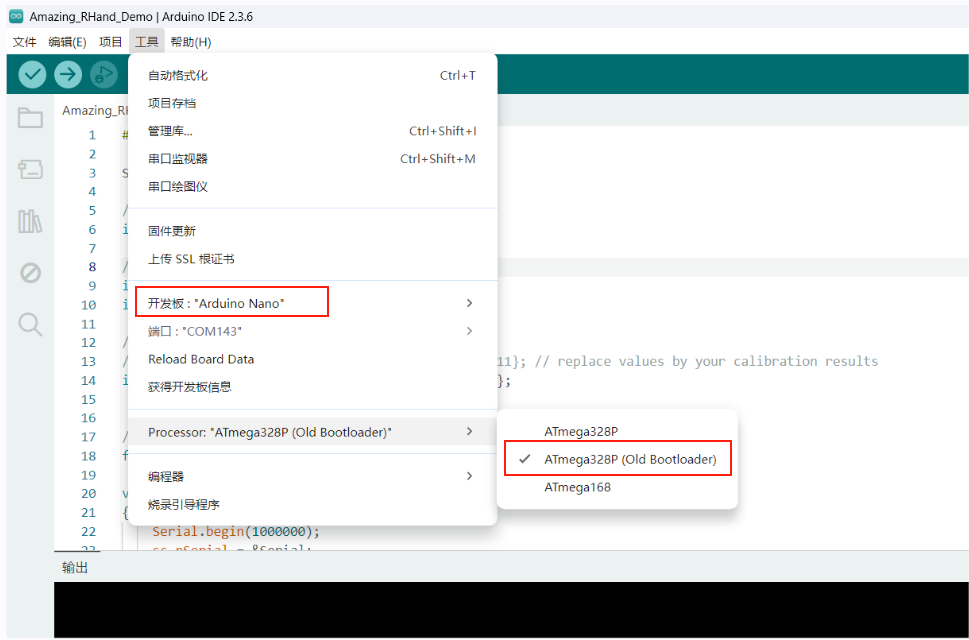
(2)开发板类型选:选择“Arduino Nano”
2、调试舵机1、2
(1)编辑:根据要调试的舵机ID,修改如下位置。如要调试食指,则设置ID值为1、2
(2)上传程序到开发板中
(3)连线:将开发板与舵机驱动板、1、2号舵机连接起来,可以听到舵机齿轮旋转一定角度后停止。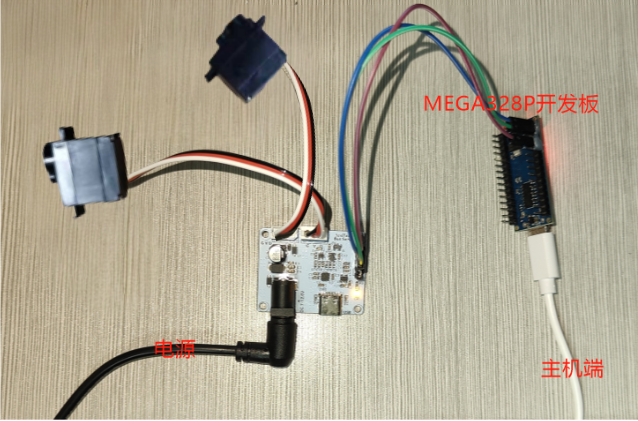
(4)将伺服喇叭安装在齿轮上,位置尽量保持平行
3、调试舵机3、4
(1)断开328P开发板与舵机驱动板之间的接线(否则无法上传)
(2)编辑:设置ID值为3、4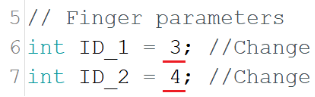
(3)上传程序到开发板中
(4)连线:将开发板与舵机驱动板、3、4号舵机连接起来,可以听到舵机齿轮旋转一定角度后停止。
(5)将伺服喇叭安装在齿轮上,位置尽量保持平行
4、调试舵机5、6
步骤同上
5、调试舵机7、8
步骤同上 -
微调中间值
1、上传代码程序“01 微调MiddlePos值时使用” 到 开发板中
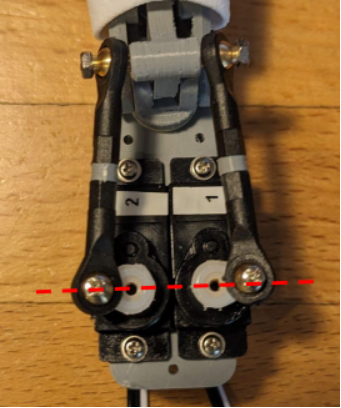
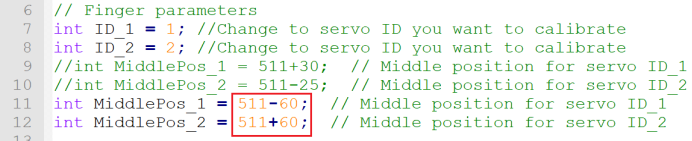
2、手指处于闭合位置时,立即停止程序(断开数据线即可),并检查伺服喇叭是否正确对齐(如下图)。如果未对齐,调整程序中MiddlePos_1、MiddlePos_2的值,直到对齐为止。记录下该值(8个舵机对应8个值),最后的程序中要使用。
-
运行测试程序
1、将上面保存的MiddlePos_1、MiddlePos_2的值填入下面数组中,下载程序即可。

-
运行“02 演示程序”
(1)自行安装软件arduino,根据自身系统参考安装教程
(2)在灵巧手调试\00 TTL串口舵机\arduino程序(MEGA328P开发板)\02 演示程序目录下根据 左手还是右手 打开对应的ino文件
(3)编译上传arduino程序到开发板的话,要先在 库管理器 里安装FTServo库、SCServo库
(4)开发板类型选:选择“Arduino Nano”
(5)编译并上传
注意
此时电脑只单独连接到开发板,开发板先不连接到舵机驱动板(即不和灵巧手连接)上传成功后,将开发板通过三根跳线连接到舵机驱动板上,舵机连接到舵机驱动板,参考 ·上面的MEGA328P开发板调试时的接线方式·。
灵巧手会不断循环运行“02 演示程序”
运行结果如下: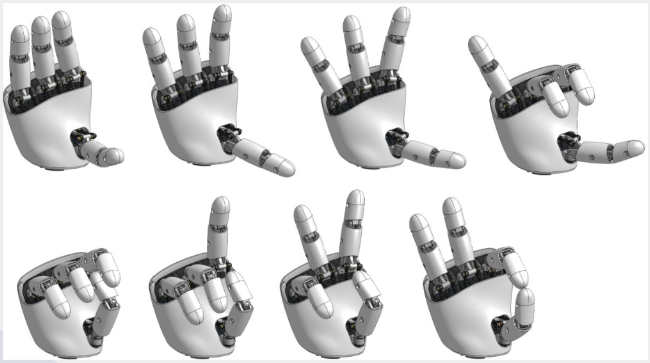

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐



 7
7 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)