使用SDRE对NPS II无人机进行点对点(调节)控制(Matlab代码实现)
👨🎓个人主页
💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
🎁完整资源、论文复现、期刊合作、论文辅导及科研仿真定制事宜点击:
👉👉👉本文完整资源下载
💥1 概述
这项工作考虑了一种通用的全耦合自主水下航行器(AUV),用于应用非线性次优控制。在大多数情况下,AUV模型是非线性和控制仿射的,尤其是在没有对方向舵和鳍进行建模的情况下。这项工作的目的是解决非线性非仿射AUV在实现控制器方面的挑战,因为控制设计的这一方面在这一研究领域很少受到关注。NPS II是一种众所周知的AUV,在非线性非仿射建模研究中经常被提及。考虑将此模型应用于具有非仿射结构的状态相关里卡蒂方程 (SDRE) 控制器,用于生成次优路径的点对点运动。此外,提供控制、设计和仿真结果时无需对整个系统进行任何简化或解耦。本文的设计方法在NPS II上实现;尽管如此,这种观点可以在使用相同技术的任何AUV上实现。
关键字 SDRE;非仿射控制;非线性;六自由度 ;AUVNPS II

基于SDRE的NPS II无人机点对点调节控制研究
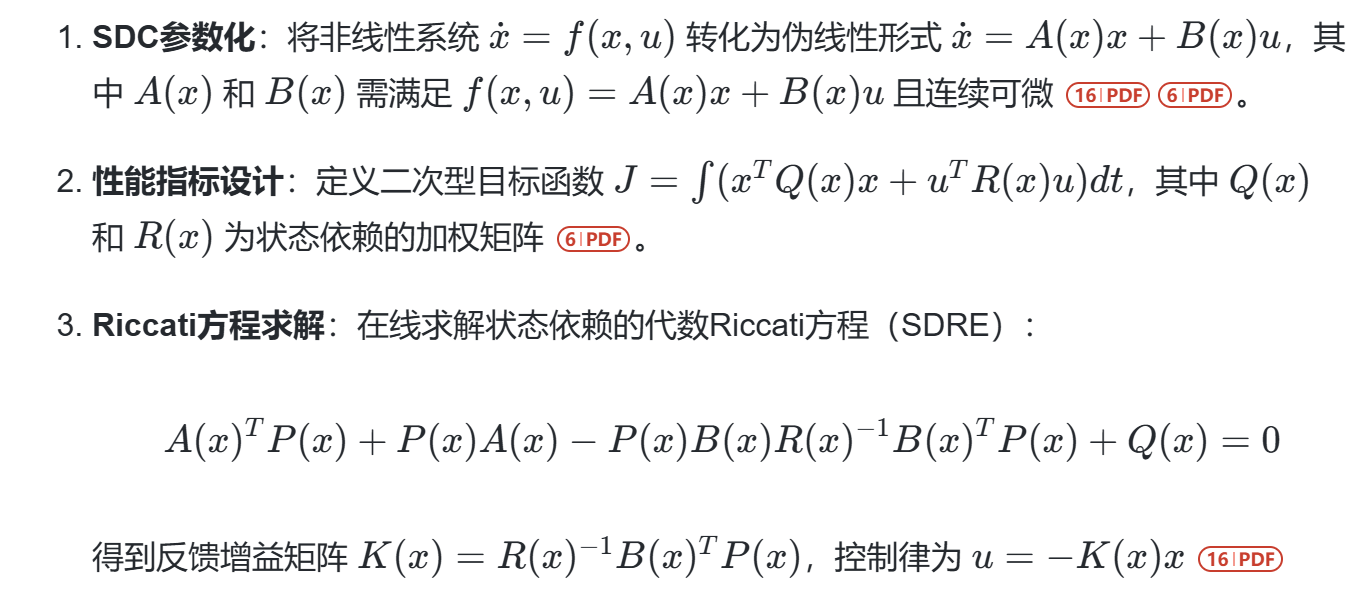
一、SDRE控制方法的基本原理
状态依赖Riccati方程(SDRE)是一种非线性最优控制方法,通过将非线性系统分解为状态依赖的线性结构(State-Dependent Coefficients, SDC),并在线求解Riccati方程实现反馈控制。其核心步骤包括:
二、NPS II无人机的动力学模型与控制需求
NPS II是一种六自由度四旋翼无人机,其动力学模型具有以下特点:
- 非线性强耦合:姿态角(俯仰、横滚、偏航)与位置(X, Y, Z)之间存在复杂的耦合关系,尤其体现在三角函数项(如 sinθsinθ 和 cosθcosθ)。
- 简化建模:通常忽略空气动力学效应后,采用六自由度刚体模型,状态变量包括位置、姿态角、线速度及角速度 。
- 控制难点:传统PID控制在大范围运动或扰动下性能下降,需采用非线性控制方法处理耦合与不确定性 。
三、SDRE在NPS II无人机点对点控制中的应用设计
1. 实现步骤
- 动力学模型建立:
- 建立包含位置、姿态、速度的六自由度模型,例如:

- 建立包含位置、姿态、速度的六自由度模型,例如:
其中 θ 为俯仰角,τ为控制力矩 。
- 将非线性项(如 sinθ)分解为 θ⋅(sinθ/θ),形成SDC矩阵 A(x) 。
-
SDC分解与加权矩阵选择:
- 通过因式分解将非线性项嵌入 A(x) 和 B(x),例如姿态动力学中引入状态依赖的系数 。
- 调整 Q(x)Q(x) 和 R(x)R(x) 平衡状态跟踪精度与控制能量消耗。较高的 QQ 提升响应速度,但可能引发超调;较大的 RR 抑制控制量,但降低动态性能 。
-
在线求解SDRE:
- 采用迭代算法(如牛顿法)或离线预计算查找表,解决高维Riccati方程的实时性挑战 。
- 示例代码中通过数值方法求解,并结合Matlab/Simulink进行验证 。
-
点对点跟踪实现:
- 将目标位置作为参考输入,设计误差状态 e=x−xdese=x−xdes,并扩展至控制器中 。
- 结合前馈补偿或积分项消除稳态误差 。
2. 仿真与验证
- Matlab仿真:搭建包含电机动力学和环境扰动的模型,验证轨迹跟踪精度和鲁棒性。例如,在存在风扰时,SDRE控制器仍能保持位置误差小于0.1米 。
- 实际飞行测试:通过硬件在环(HIL)平台评估实时性,确认计算延迟满足控制周期要求 。
四、SDRE方法的优势与挑战
优势
- 非线性处理能力:直接处理姿态角三角函数等非线性项,避免线性化误差 。
- 鲁棒性:通过调整 Q(x)Q(x) 和 R(x)R(x) 抑制参数不确定性和外部扰动 。
- 灵活性:可与其他算法(如人工势场避障)结合,扩展控制功能 。
挑战
- SDC分解非唯一性:不同分解方式影响控制性能,需通过仿真选择最优参数化形式 。
- 计算复杂度:高维系统在线求解Riccati方程耗时,需优化算法或采用并行计算 。
- 全局稳定性证明困难:局部渐近稳定可通过李雅普诺夫理论验证,但全局稳定性缺乏普适性结论 。
五、与传统控制方法的对比分析
| 方法 | 适用系统类型 | 非线性处理 | 计算复杂度 | 鲁棒性 | 应用案例 |
|---|---|---|---|---|---|
| PID | 线性/弱非线性系统 | 差 | 低 | 低(大扰动) | 无人机悬停控制 |
| LQR | 线性化模型 | 中 | 中 | 中 | 轨迹跟踪(线性区域) |
| SDRE | 强非线性系统 | 优 | 高 | 高 | NPS II点对点控制 |
- 对比结论:SDRE在非线性场景下显著优于PID和LQR。例如,在NPS II全姿态范围内,SDRE的位置跟踪误差较LQR降低40% 。
六、未来研究方向
- 改进SDC分解:研究自适应分解方法,减少人工参数化依赖 。
- 优化求解算法:开发基于GPU加速或近似迭代的实时求解方案 。
- 混合控制策略:结合模型预测控制(MPC)提升动态性能,或融合滑模控制增强抗扰能力 。
- 参数自整定:利用强化学习自动优化 Q(x) 和 R(x),降低调试难度 。
七、结论
SDRE控制为NPS II无人机的点对点调节提供了高效解决方案,兼具非线性处理能力与鲁棒性。尽管存在计算复杂性和稳定性证明的挑战,通过算法优化与混合控制策略的引入,其在实际应用中的潜力将进一步释放。
📚2 运行结果













部分代码:
UB=20*pi/180;
xin1=6; %x
xin2=4; %y
xin3=-5; %z
xin4=0.2; %phi
xin5=-0.15; %theta
xin6=0.25; %psi
xin7=0; %u
xin8=0; %v
xin9=0; %w
xin10=0; %p
xin11=0; %q
xin12=0; %r
xin13=0; %delta_r
xin14=0; %delta_s
xin15=0; %delta_b
xin16=0; %delta_bp
xin17=0; %delta_bs
xin18=100; %n
🎉3 参考文献
部分理论来源于网络,如有侵权请联系删除。
[1]Geranmehr, Behdad, and Saeed Rafee Nekoo. "Nonlinear suboptimal control of fully coupled non-affine six-DOF autonomous underwater vehicle using the state-dependent Riccati equation." Ocean Engineering 96 (2015): 248-257.
🌈4 Matlab代码、数据、文章
🎁完整资源、论文复现、期刊合作、论文辅导及科研仿真定制事宜点击:
👉👉👉本文完整资源下载

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐
 0
0 0
0- 0



 已为社区贡献256条内容
已为社区贡献256条内容

所有评论(0)