AI+系列:AI时代,AI给的代码有坑,咋整-《如何把玩分布式里面的协同》- 三-1-(8)
@[TOC]AI+系列:AI时代,AI给的代码有坑,咋整-《如何把玩分布式里面的协同》- 三-1-(8):
AI代码时常有坑,在AI时代,我们需要培养自己透过现象看本质的功力,如果只是一味的复制粘贴AI给的代码,而没有识别出AI给的代码有没有什么问题、有没有什么坑、有没有什么优化的点,这是一件风险很大的事。AI泛滥,系统、精准、可追溯的底层知识,反而变得极其稀缺,溢价更高。
—片尾有彩蛋哦
这天,负责公司内部工具开发的同事老王,一脸愁容地找到你。
“大神,江湖救急!”老王开门见山,“我们内部用的那个技术文档协同编辑器,你知道吧?现在大家在上面一起写API文档、画流程图,结果天天有人跟我抱怨,说写着写着,自己刚打的字没了,别人的段落跑到自己段落里了,最离谱的是,两人同时在文档最开头写标题,保存后再一刷新,文档直接变成了两个版本,像细胞分裂了一样!”
老王叹了口气:“老板让我用AI帮忙写个协同编辑的底层算法,说是现在AI编程可厉害了。我让AI写了个啥协同算法,结果线上刚跑半天就崩了,现在连代码回滚都不知道从哪儿滚。你看…”
你一看老王递过来的、被AI生成的代码搞得千疮百孔的协同编辑器,立刻明白了问题所在。这背后,就是分布式系统里最经典、最反直觉的难题之一——操作协同(OT,Operational Transformation)。
你笑了笑,对老王说:“别急,这事儿,AI还真搞不定。这玩意儿的历史和坑,三天三夜都说不完。咱就从你那个‘细胞分裂’的文档开始讲起。”
🟢 Version 1:天真的先驱者——做个简单的“位置挪移”行不行?
你打开了老王那个“细胞分裂”的文档。问题很简单:假设文档初始内容是 "ABC"。
- 用户A(老王)想在开头加个标题,在位置1插入了
"X",期望得到"AXBC"。(操作 O₁:Insert(1, "X")) - 用户B(另一个同事小李)同步删除了位置2的
"C",期望得到"AB"。(操作 O₂:Delete(2))
他们俩各自操作,如果不互相通信,一个看到 "AXBC",一个看到 "AB"。为了让两边一致,最简单的想法是:我把我的操作发给你,你把你的操作发给我,然后咱们各自执行一下。
但直接执行就出事了。A收到B的 Delete(2),在自己的 "AXBC" 位置2删掉了 "B",得到 "AXC"。B收到A的 Insert(1, "X"),在自己的 "AB" 位置1插入 "X",得到 "AXB"。
得了,“细胞分裂”了。 这就是你向老王解释的第一个结论:在分布式协作中,直接应用对方的操作,版本会分叉。
改进思路:让操作“理解”上下文
第一位研究这个问题的先驱(1989年,Ellis和Gibbs)想出了一个天才又朴素的办法,称为dOPT算法。
他发现,问题出在操作的“位置”是针对当时本地文档的。当操作到达对方那里时,文档已经被对方自己的操作改变了。所以,我们需要一个 transform 函数,在应用一个操作之前,先根据并发的操作,把这个操作的“位置”修正一下。
逻辑非常直观,就是一连串的if...else:
- 如果别人在我前面插入了一些字,那我的操作位置就得往后挪一挪。
- 如果别人在我前面删掉了一些字,那我的操作位置就得往前挪一挪。
这就像两个人排队,你前面突然插进来一个人,你的位置序号就变了。你得重新计算你的位置。
你对老王说:“这就是OT算法最原始、最单纯的形态。你看,是不是很有道理?”
🚨 致命缺陷:那要是咱俩撞一块儿了呢?
“有道理个鬼!”老王一拍大腿,“这能解决小李删字符的问题。但最开始说的‘两人同时写标题’的问题,它怎么解决?”
“这就是V1的致命缺陷。”你解释道,“当多个人在完全相同的位点进行插入时,比如你和另一个同事同时在文档空白开头(位置0)写上自己的标题,A写"q", B写"p"。if (posA > posB) 这个条件不成立,if (posA < posB) 也不成立,那 posA == posB 时怎么办?”
算法里没有规定一个独一无二的、所有人都同意的 “平手解决(Tie-breaking)” 规则。结果就是,A的机器按自己的逻辑修正后,觉得 "p" 应该在前面,最终得到 "pq";B的机器按同样的逻辑,觉得 "q" 应该在前,最终得到 "qp"。
这不仅是分叉,更是同一行代码,在两个程序员眼里,逻辑是互相矛盾的。 这在多人协作中是灾难性的。
🤖 AI在这个阶段会给你埋下的惊天大坑
“等等,”老王打断了你,“我上次就是让AI写这个transform函数,它写出来还真跟你想得差不多。你的意思是,从这里就开始错了?”
“错得离谱!”你拿出他AI生成的代码片段,指着其中一行。
// ❌ AI 极易写错的 V1 伪代码(带有隐藏灾难)
function transform(opA, opB) {
let transformedA = { ...opA };
if (opA.type === 'insert' && opB.type === 'insert') {
if (opA.position > opB.position) {
transformedA.position += opB.text.length;
}
// AI 在这里经常漏掉,或者写成下面这样没有唯一标识的平手处理:
else if (opA.position === opB.position) {
// 👇 灾难来源!AI觉得“那就加呗”,但它没意识到两端都会加
transformedA.position += opB.text.length;
}
}
return transformedA;
}
“你看,AI的‘无上下文状态盲区’ 就在这里。”你解释道。
- 缺乏物理直觉:AI不理解“两个人同时在一个点插入”在物理世界意味着什么。它没有“争抢”的概念。它只是根据海量代码里看到的模式,认为
position相等时,做个位移总没错。 - 无状态推导:它无法自发地推导出一个需要全局唯一标识(如Client ID、时间戳)的“平手规则”。因为它生成的只是一个独立的函数,不是一个有状态管理的完整系统。它不知道还需要
userID这种东西来打破僵局。
“AI 的直觉式生成,在遇到这种需要跨实体、跨状态的逻辑一致性时,会百分之百翻车。它给你的代码,能跑通简单的单元测试,但一上多人环境,就是个定时炸弹。”你对老王总结道。
🧠 深度解析:dOPT算法——协同的曙光与单点故障
1. dOPT算法(1989年,Ellis & Gibbs)
- 开创性:首次在计算机支持协同工作(CSCW)领域提出了操作转换的概念,证明了在分布式编辑器中实现最终一致性是可能的。它是Google Docs、腾讯文档等所有现代协同编辑软件的思想鼻祖。
- 核心机制:状态向量(State Vector)。每个站点维护一个向量,记录自己从其他所有站点接收到了多少个操作。通过比对状态向量,就可以判断一个远程操作是否与本地操作“并发”。
- dOPT的致命伤——Tie-breaking的缺失:dOPT在单次转换
T(Oa, Ob)中是完备的。但当Oa和Ob在相同位置插入时,它需要一个全局唯一的全序关系来决定谁“真正”在先。这个全序关系不能依赖物理时间(因为各客户端时钟不同),必须基于逻辑规则,如siteID。AI的代码之所以失败,就是因为它生成的transform是一个无状态的纯函数,没有、也理解不了这个全局siteID概念的引入。
🟡 Version 2:学术界的完美主义——用数学来证明协同
“那后来呢?这个问题不能就晾在这儿吧?”老王追问道。
“搞学术的大佬们当然忍不了。”你笑了笑,“第二个阶段,大概在1996年,一帮学者(Ressel等人)站出来说:你那个dOPT,工程上能用,但数学上不完美。我们要定义一个绝对正确、可以形式化证明的OT算法。”
于是,他们提出了一个必须满足的两大核心数学属性:
- TP1 (Transformation Property 1):两个并发操作,无论以什么顺序转换,最终结果必须等价。也就是说
O₁先转换O₂再应用,必须等于O₂先转换O₁再应用。这叫 收敛(Convergence)。 - TP2 (Transformation Property 2):对于三个或以上的并发操作,转换的路径(先和谁转换,后和谁转换)不能影响最终结果。这叫 收敛路径无关性(Path Convergence)。
改进思路:记住所有历史,画一个“历史操作图”
为了满足这个严苛的TP2,他们搞出了一个叫做adOPTed算法的东西。它的想法极其复杂:每个客户端不能再只记住当前文档了,而是要记住从文档创建至今,所有操作的完整历史。这些历史操作会形成一个巨大的、不断增长的 Interaction Graph(交互图)。
当一个滞后的操作从网络传来时,你不能再像V1一样只跟最新的本地操作转换。你得沿着这个“操作图”,回溯到这个操作“出生”时的历史版本,一步步地把它跟它“错过”的所有操作进行转换,直到把它带到当前的版本。
“这就好比,你不是只看眼前排队的人,而是你要记住今天所有来过这里、排过队、又走了的每一个人。当一个人突然回来插队时,你要根据他离开时的历史位置,重新计算他现在该排哪。”你试图用一个比方来解释。
🚨 致命缺陷:完美,但活不下去
老王听得云里雾里:“这听起来…很费脑子和内存啊。”
“没错!”你一针见血,“这就是它最致命的地方。这个‘历史操作图’会随着用户数量和操作次数的增加而指数级膨胀。想象一下,一个上百人协同的文档,运行几天,这个‘历史图’占用的内存比文档本身大几千倍,服务器直接爆炸。而且,一旦你想支持‘撤销(Undo)’,这个转换路径图会乱成一团根本无法维护的乱麻。”
它就像物理学里的“真空中的球形鸡”,在理论上完美无瑕,但在工程上几乎无法落地。
🤖 AI在这个阶段会给你埋下的惊天大坑
“那AI呢?这种学术论文里的完美模型,AI总能写得特别好吧?”老王问。
“恰恰相反,这才是AI给你造‘海市蜃楼’最厉害的地方。”你严肃地说。
- 论文幻觉(Paper Hallucination):你让AI实现TP2,它会把SIGCOMM、CSCW顶会论文里的伪代码、数学公式给你一行行抄下来。代码看着极其高大上,充满了图遍历和递归转换。
- 基准不一致错误:但是,AI无法理解一个工程前提——它写的所有
transform(Oa, Ob)都假设Oa和Ob是基于完全相同的历史状态(Same Base) 的。在真实的、延迟波动的网络里,你收到的小李的操作,可能是基于10秒钟前的版本。而AI的代码会天真地把这个“来自过去”的操作,直接与你“基于现在”的操作进行转换。转换的基准错了,结果自然是乱码。 你会看到文字被莫名其妙地剪切、拼接、丢到文档的另一个角落。
“所以,V2的算法虽然在学术上推动了理论边界,但它留下了一个一堆AI填不了的工程坑。”你总结道。
🧠 深度解析:adOPTed/GOT——被理论完备性压垮的工程
1. adOPTed算法(1996年,Ressel等)与GOT(1998年,Sun等)
- 理论贡献:首次形式化地定义了OT的TP1/TP2属性,使得OT从一个“工程技巧”变成了一个可以形式化验证的“计算机科学理论”。这是OT研究的分水岭。
- 交互图(Interaction Graph)的灾难:该模型要求维护一个全局的操作因果/并发关系图。其空间复杂度在最坏情况下是O(n²)(n为历史操作数)。这违背了实时协同系统的基本工程约束。
- AI为何在此摔得最惨:AI的代码生成缺乏状态机意识。它看到一个
transform函数的输入是(opA, opB),就会线性地认为它们是可直接比较的。它无法反推出在调用这个函数前,必须先将远程操作opB回溯到与本地操作opA共享的基准上下文(Context)。这个“上下文回溯”的逻辑,才是adOPTed等理论算法的工程核心,而这部分在论文的伪代码中往往被抽象为一句"bring to same state"。
🟠 Version 3:工业界的掀桌——“搞那么复杂干嘛,加个服务器!”
你看着老王快要绕成蚊香的眼睛,笑着说:“别怕,理论家的路子走不通,我们工程师有自己的办法。”
“大概在2000年代中期,Google的人要做一个叫Google Wave(后来的Google Docs)的东西。他们看了看V2那个天上楼阁的完美理论,直接掀了桌子:去中心化的完美OT算法太反人类了!我们为什么不直接加一台中心服务器?”
这个掀桌子的思路,成就了现代工业级OT的基石——Jupiter算法。
改进思路:服务器当法官,我说啥顺序就是啥顺序
Jupiter架构的思路非常简单粗暴:
- 放弃去中心化,放弃复杂的TP2证明。
- 引入一台中心服务器作为唯一的“法官”。所有客户端都不再P2P通信,而是只与服务器通信。
- 服务器来决定所有操作的绝对先后顺序。谁的操作先到服务器,谁就排在前面,形成一个全球唯一的、线性的操作时间线(Timeline)。
客户端的逻辑被大大简化。它只需要在本地维护一个非常简单的2D状态空间:
- X轴:服务器确认过、已提交的操作历史。
- Y轴:你本地生成、但还没发出去或没被服务器确认的待定操作。
客户端要做的所有转换,就是当收到服务器推下来的新操作时,把这个新操作依次穿过你Y轴上所有“在路上”的本地待定操作,转换一下,然后应用到本地文档。
🚀 成就与代价
“这个架构一出来,世界清净了。”你说道,“Google Docs、腾讯文档的早期版本,核心都跑不出这个Jupiter架构。它第一次让OT变成了一个可以大规模商用的东西。”
“但是,”你话锋一转,“所有的代价都转移到了服务器上。”
这个中心服务器变成了一个巨大的瓶颈。它需要为成百上千个在线用户,每人维护一个独立的连接队列和待处理操作缓冲区。在高并发下,服务器的内存和CPU开销是巨大的。而且,由于所有操作都要经过服务器,哪怕两个用户坐在同一个办公室里,他们的协同数据也得去美国的数据中心绕一圈。
最关键的是,它还只能处理纯文本。一遇到复杂的富文本(比如,你可以在文档里插入一个表格、一个视频,或者是一个可以拖拽的思维导图节点),纯靠数字索引的加减位移,立刻就不够用了。这引出了下一个时代。
🤖 AI在这个阶段会给你埋下的惊天大坑(状态机断层)
“老王,你以为用上‘服务器’这个简单粗暴的办法,AI就能写对了?”你摇摇头,“照样翻车。而且翻得更隐蔽。”
“AI在这个阶段,最大的毛病是‘时序断层’。”你一边说,一边在白板上画出状态图。
“一个客户端,在跟服务器交互时,它内部其实有一个非常复杂的状态机。比如:
- Synchronized(同步态):本地和服务器一致,没有正在飞的操作。
- AwaitingConfirm(等待确认态):你打了个字,发了出去,在等服务器说‘收到’。
- AwaitingWithPending(等待中又有新操作态):就在你等服务器确认上一个字的时候,你又噼里啪啦敲了一串字。这些新操作就得先‘排队’。”
你指着AI可能生成的代码逻辑说:
“AI的思维是线性的。它通常会写成:‘收到服务器推送的远程操作 -> 与本地未提交的操作做一次transform -> 应用到界面’。这在大前提上就错了!”
“因为在你收到远程操作的那个瞬间,你本地的状态可能不是只有一个‘未提交操作’,而是一堆!AI很难自发地写出一个能管理这个‘待处理操作队列’(Pending Queue)的完整状态机。它写的代码,在网络稍微卡顿一下,然后再恢复时,就会出现:
- 操作被重复应用(Double Apply):一个字出现两次。
- 本地刚打的字被服务器强制抹除:你觉得你写了,一松手,字没了。
这些都是致命的体验Bug。”
🧠 深度解析:Jupiter——工业协同的基石与枷锁
1. Jupiter算法(Google,约2006年)
- 哲学革命:从P2P的理论完备性,转向C/S架构的工程可行性。它放弃了全局TP2,通过服务器的“中心化定序”来实现全局一致性。这是“工程实用主义”对“学术完美主义”的一次经典胜利。
- 客户端状态空间:客户端维护一个2D状态,水平是服务器已提交的操作序列,垂直是本地未确认的操作。所有转换都发生在这个2D平面的“交叉点”上。这极大地简化了客户端的OT逻辑,使得代码能够被人类工程师在工程中可靠实现。
- AI的“时序断层”详解:AI生成的代码无法建模**“Staged”事件处理模型**。正确的逻辑是,在
onRemoteOp到达时,必须先冻结当前本地的Pending队列,然后对RemoteOp进行一次“穿越式”转换(先与Pending[0]转换,其结果再与Pending[1]转换…)。AI的代码通常会漏掉这个for循环,或者错误地在循环中修改了队列本身,导致转换链断裂。
🔵 Version 4:现代终极形态——当文档不再是文字,而是一棵树
故事还没完。“现在你明白了吧,为啥你们那个支持富文本、流程图、API卡片的技术文档编辑器,问题比一个纯文本编辑器要难一个数量级?”
老王疯狂点头。
“到了今天,我们的文档其实已经不是一行行文字了,它内部是一棵复杂的JSON树。”你解释道,“比如,一个文档对象可能是这样的:”
{
"sections": [
{
"type": "paragraph",
"lines": [ "Hello", "World" ]
},
{
"type": "image",
"src": "url..."
}
]
}
在这种结构上,你不能再说什么“在位置5插入一个字符”了。因为你的操作可能直接作用于树上的一个节点。比如,你删除了整个第一段"sections[0]",或者在第二句话"sections[0].lines[1]"后面加了个逗号。
最新演进:JSON-OT 与 CRDT的路线之争
为了应对这种复杂度,OT技术进行了最后一次重大进化,走上了两条截然不同的路:
-
JSON-OT(以ShareDB为代表):
- 思想:把文档当作一棵树,操作变成对树路径(Path) 的操作。例如,一个操作是
{ p: ['sections', 0, 'lines', 2], od: '旧文字', oi: '新文字' }。 - 协同方式:当两个操作冲突时,不再是简单的
position加减,而是对路径(Path) 进行转换。如果你的操作路径是['sections', 0, ...],而我的并发操作是修改了数组导致你父节点sections[0]的索引发生了变化,那我的路径转换函数就需要理解数组的插入/删除逻辑,去修正你的路径索引。 - 问题:随着富文本节点类型(图片、表格、变量、@人)越来越多,你需要为每种可能冲突的节点操作对,编写一个转换规则。这个冲突矩阵会随着节点类型的增加而平方级爆炸,维护成本高到无法接受。
- 思想:把文档当作一棵树,操作变成对树路径(Path) 的操作。例如,一个操作是
-
走向CRDT(无冲突复制数据类型,如Yjs, Automerge):
- 掀桌2.0:既然为每种节点写OT冲突转换这么痛苦,我们能不能从根本上避免冲突?
- 思想:给文档里的每一个字、每一个节点、甚至每一个格式属性,都分配一个全球唯一的、不可变的ID(如UUID)。操作不再是“在位置5插入”,而是“在ID为’abc-123’的字符后面,插入一个新的字符,它的ID是’def-456’”。
- 优势:因为所有操作都通过ID来定位,所以不再需要复杂的路径转换! 你删你的节点,我插我的节点,哪怕你把我引用的父节点删了,CRDT也能保证你的操作可以被优雅地处理(例如作为孤儿节点存在),而绝不会引发崩溃。这是现在最前沿、最火热的协同技术。
🤖 AI在现代阶段的“降维打击式”坑点
“那AI呢?这种最新的JSON-OT或者CRDT,代码量应该很大,正好是AI擅长的吧?”老王天真地问。
“来,我给你看一段AI写的JSON-OT路径转换代码。”你翻出一个你预感到会出问题的代码段。
// ❌ AI 脑补的 JSON-OT 路径转换(必死代码)
function transformPath(opA, opB) {
// AI以为只要对路径里的 index 进行加减就行了
if (opA.path[1] > opB.path[1] && opB.type === 'insert') {
opA.path[1]++;
}
return opA;
}
“看出问题了吗?”你问。
“好像…只处理了数组索引?”老王有些不确定。
“没错!”你提高了音量,“这就是AI最致命的 ‘结构塌陷’ 问题。AI彻彻底底地遗忘了树结构的本质。”
“如果用户B的操作opB,不是在一个数组里插入一项,而是把opA要操作的那个父节点sections[0]整个给删除了呢?”
“按照AI写的这个路径转换逻辑,它只会傻傻地判断索引大小,根本不会检查目标路径上的父节点是否还活着。然后,opA就会拿着一个指向已不存在节点的路径,去修改文档。结果是什么?”
“前端JavaScript直接抛出一个Cannot read property of undefined的异常,整个页面白屏崩溃!”
“这就是AI在处理这种需要全局结构感知的任务时的局限性。它的注意力机制在生成代码时,焦点可能只在path[1]这个局部索引上,而无法在整个函数的作用域内,始终保有一个‘父节点可能被删除’的全局上下文意识。”
🧠 深度解析:JSON-OT vs. CRDT——协同技术的终局之战
1. JSON-OT(ShareDB, OT-JSON为代表)
- 路径转换的复杂性:核心不再是简单的索引平移,而是对数组/对象结构变换的操作进行转换。例如,一个并发操作修改了数组长度,另一个操作的路径中的数组索引就需要随之改变。这种转换逻辑需要完美编码
InsertInArray,DeleteFromArray,MoveInArray等所有结构操作之间的冲突关系。- 冲突矩阵爆炸:对于一个有
M种原子操作(insert, delete, replace, move, addProp, delProp…)的系统,理论上需要M x M的转换函数矩阵。即使很多组合可以简化,其维护负担也远超人脑极限。2. CRDT(Yjs, Automerge为代表)
- 哲学变革:从转换操作到规避冲突:CRDT通过为每个数据单元分配唯一逻辑ID(如逻辑时钟+ClientID),将“相互覆盖”的并发写入问题,转变为“如何合并且保留所有用户意图”的问题。例如,两个用户同时在一个位置插入,Yjs的算法会根据ClientID来决定谁排前面,且这个规则是确定性的、所有客户端都会得出相同结论的。
- 核心优势:天然的P2P支持、无需中心服务器(强一致定序)、优秀的离线编辑与合并能力、以及彻底的避免了OT路径转换中可能出现的结构塌陷问题。你的描述中,AI导致白屏的
Cannot read property...错误,在CRDT架构中从设计上就被消除了。
💡 总结:人类工程师在AI时代的价值
老王听完这从V1到V4的漫长演进史,以及AI在每个阶段埋下的坑,陷入了沉思。许久,他感叹道:“所以,不是AI不行,而是这些看似简单的‘编辑协同’,背后有这么多复杂的时序、状态、结构的工程坑。”
“对。”你点头,“AI擅长总结完美的理论定义,写一个教科书般的算法框架。但它天生对‘并发’、‘异步’、‘网络延迟’、‘非线性的状态不一致’等真实世界引出的问题,缺乏感知力。”
你指着这份最后的总结表格对老王说:“你的价值,就是把这种‘非线性’的现实世界要求,变成AI能理解的分层架构、状态机定义、全局规则的提示词,然后去Review它生成的代码,一眼看穿它在哪里忽略了并发,在哪里忘记了父节点会消失。”
“这才是未来工程师的核心竞争力。我们不是人肉代码生成器,而是系统架构的守护者和AI幻觉的终极猎手。”
| 阶段版本 | 核心演进逻辑 | 核心痛点/缺陷 | 🤖 AI 必错区域(帮你Debug/Review的抓手) |
|---|---|---|---|
| V1 (dOPT) | 简单的相对索引加减移位 | 多用户(3人+)同位置并发时直接分叉 | 无状态盲区:写出不带 user_id 权重、无法处理平手争议的代码。 |
| V2 (adOPTed) | 引入数学收敛属性 T P 1 TP1 TP1 / T P 2 TP2 TP2 | 历史操作图呈指数级膨胀,内存吃满 | 基准幻觉:默认并发操作基于相同版本,在现实错位网络下算法报废。 |
| V3 (Jupiter) | 妥协引入中央服务器,单线序化 | 服务器性能瓶颈;状态机极其复杂 | 时序断层:漏掉 Client 端的 Pending 缓冲区,高延迟下文字会被吞掉或重字。 |
| V4 (JSON-OT) | 路径化(Path)转换,支持树状结构 | 节点类型多时冲突矩阵爆炸,开发困难 | 结构塌陷:只改索引不顾节点死活,上游节点被删时直接引发前端白屏。 |
老王拿着你给他的这份“OT演变史与AI防坑指南”,心满意足地走了。而你,望着自己那个已经进化成“数据工厂”的3D查看器,心里想的却是另一件事:协同编辑的终局是CRDT,那你的“AI数据工厂”,未来是不是也需要一个能处理海量3D标注数据的、多人协同的“数据生产线”呢?
故事,永远在继续。而下一个坑,也许就在不远处等着你。
解决方案:
- 只要丢给它一个工业 CAD 模型(比如 STL文件),它就能自动在虚拟空间中 360° 环绕拍照,瞬间吐出:
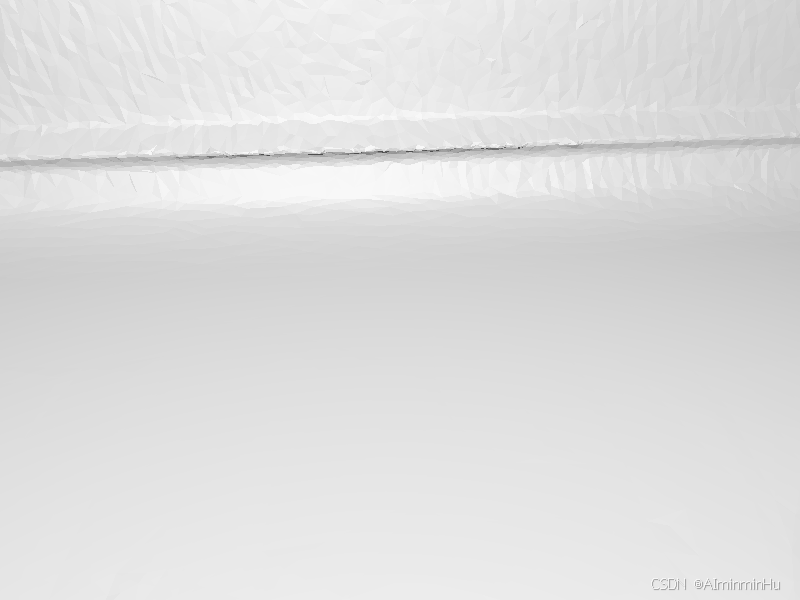
- 📸 RGB 真实渲染图:rgb/frame_XXXX.png
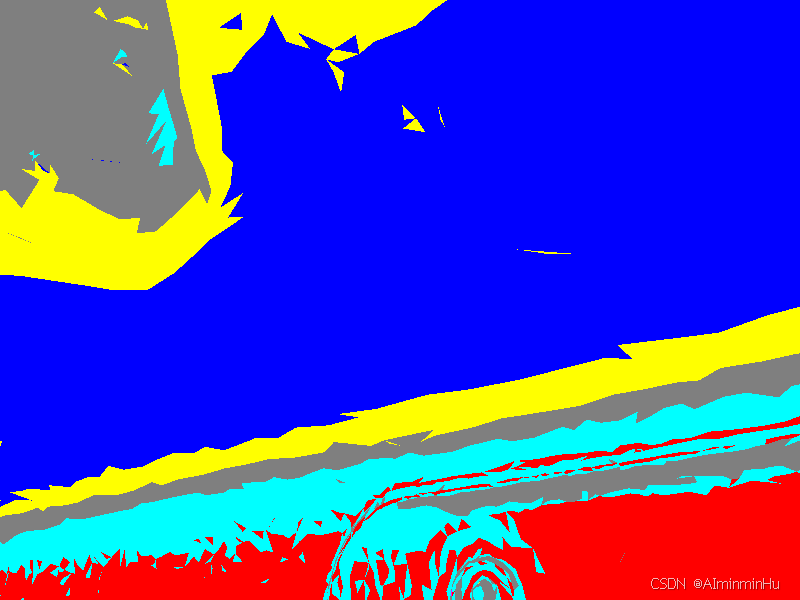
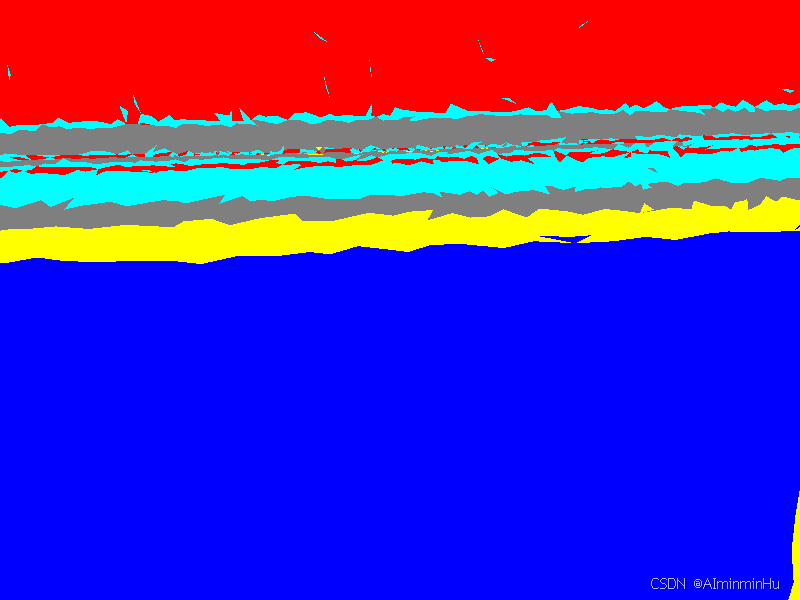
- 🏷️ 像素级语义分割 Mask (基于曲率算法,自动认出哪里是螺栓、孔洞、法兰):mask/mask_XXXX.png
- 📏 深度图(Depth) (告诉机器人距离多远),depth/depth_XXXX.png + .raw
- 📐 6DoF 相机位姿 (告诉机器人从哪个角度抓),camera_poses.json
- 📂 最后直接打包成 AI 训练最爱吃的 COCO/YOLO 格式。
- label_legend.txt【类别ID→名称→RGB颜色映射】、description.json【DeepSeek-V3 视觉API生成零件特征描述】
实际效果:
- 想看视频:
huhb_synthetic_data
- 不想看视频:也有图片:







【还有附带的:camera_poses.json、label_legend.txt、manifest.json,具体内容见附录】
巨人的肩膀:
- OpenGL 4.6 Specification
- Vulkan 1.3 Specification
- Khronos Group SPIR-V Whitepaper
- 历代GPU架构白皮书(NVIDIA Fermi至Blackwell,AMD GCN至RDNA 4)
AI时代,除了刷题,怎样能从一道题里榨出架构能力、底层知识、出题人视角以及与工作结合的价值…
你是不是做过或者刷过:
编辑距离:给你两个单词 word1 和 word2, 请返回将 word1 转换成 word2 所使用的最少操作数 。
你可以对一个单词进行如下三种操作:
插入一个字符
删除一个字符
替换一个字符
class Solution {
public:
int minDistance(string word1, string word2) {
int m = word1.size(), n = word2.size();
// dp[i][j] 表示 word1 前 i 个字符变成 word2 前 j 个字符的最少操作数
vector<vector<int>> dp(m + 1, vector<int>(n + 1));
// 初始化边界:一方为空串时的操作数
for (int i = 0; i <= m; i++) dp[i][0] = i; // 删除 i 次
for (int j = 0; j <= n; j++) dp[0][j] = j; // 插入 j 次
// 填表
for (int i = 1; i <= m; i++) {
for (int j = 1; j <= n; j++) {
if (word1[i - 1] == word2[j - 1]) {
// 字符相同,无需操作
dp[i][j] = dp[i - 1][j - 1];
} else {
// 字符不同,取三种操作的最小值 + 1
dp[i][j] = min({
dp[i - 1][j], // 删除 word1[i-1]
dp[i][j - 1], // 插入 word2[j-1]
dp[i - 1][j - 1] // 替换 word1[i-1] 为 word2[j-1]
}) + 1;
}
}
}
return dp[m][n];
}
};
**。
1. 当出题人:定义问题的边界和代价
LeetCode 题是别人出好的,你只是求解者。但如果在工作中,你需要去定义这个问题。
- 原始题:插入、删除、替换代价都是1。
- 你是出题人:在你的CAD协同场景,一个用户“移动”了一个图元,另一个用户“删掉重建”了它。如果我们要评估两个操作序列的“差异程度”,插入、删除、替换的代价一样吗?显然不一样。“移动”可能应该代价更小,因为它更符合用户意图。你可以自定义编辑距离的代价矩阵,甚至操作不限于字符串,而是针对图元属性(位置、颜色、线型)的编辑操作。
你看,一旦你变成定义“什么叫差异”的人,你就在定义产品价值,而AI只是执行你定义好的DP计算。这就是出题人思维。
4. 提升架构能力:把算法嵌入到系统里
如果你只是在控制台里跑这个算法,那只是功能。但你的工作里有“搜索功能”和“文件树”,这道题马上就能变成架构的一部分。
- 模糊搜索与拼写纠错:用户在文件树搜索框输入“墙住”,你想提示“是不是要找‘墙柱’?”。这背后就需要编辑距离。但用户可能输入了多个字,你要在全量文件名中快速找到编辑距离最小的K个,能直接套用O(m*n)的DP吗?不能。你要思考如何利用前缀树(Trie)+ 编辑距离的剪枝,或者**BK树(Burkhard-Keller Tree)**这种专门为编辑距离设计的度量树。
- 图纸文本搜索:如果一张DWG里有10万条文字,用户搜一个词,你要找出所有相似文本,如何设计索引?你可能要用到n-gram倒排索引先粗筛,再对少量候选用DP精排。
这就不再是解一道算法题,而是在设计一个功能模块的技术架构。你知道什么时候该用这个算法,什么时候该换一种数据结构(Trie、BK树),这正是AI考虑不到的、业务上下游的流转。
5. 掌握底层知识:看到AI看不到的坑
你贴的代码是O(m*n)空间,AI帮你生成时可能就直接这样写了。但你如果懂底层,马上就能意识到:
- 空间优化:DP表只依赖上一行和当前行,可以用两个一维数组把空间压到O(n)。为什么?因为DP状态转移具有“滚动”性质。
- 本质:这其实是求两个序列的最短编辑距离,等价于最长公共子序列的变种。再往下挖,编辑距离和图的最短路径是什么关系?每个状态可以看作图的节点,操作是边,你在找一个DAG上的最短路径。这和你UI导航里“最优路径推荐”的内核相通。
- AI的坑:如果你让AI生成一个处理10万长度的编辑距离,它可能还是给O(n^2)解法,直接跑挂。你能根据问题的稀疏性(文本很长但相似度很高时,编辑路径只在主对角线附近),要求AI实现带状DP(Banded DP) 或Myers差分算法,因为你知道底层优化点在哪里。
8. 看AI给的对不对,美不美
你完全可以把这道题当成一块试金石。
- 让AI生成一份编辑距离的C++代码。
- 你审查:它有没有处理空串?有没有用
size_t导致负数溢出?是否做了内存优化?是否考虑了字符类型(ASCII还是Unicode)?如果输入是中文,它用word1[i-1]比较会直接出错的(中文是多字节),这隐藏着一个大坑。 - 你快速重写一份支持Unicode的版本,用
std::wstring,并加上带剪枝的大文本处理。这样你对AI代码的掌控力就体现出来了。
用出题人视角定义问题,用架构能力嵌入系统,用底层知识审查AI,用软实力表达决策。AI时代,这种“吃透一道题”的能力,才是你不可替代的价值。
系列文章规划:
- ((AI升级篇)OpenGL渲染与几何内核那点事-(二-1-(14):你的3D查看器,是怎么一步步先试着造个数据工厂,向学会“教”机器人看世界的而努力)
- (让 C++ 程序长出大脑:从“语音遥控器”到具身智能 Agent 的进化之路)------OpenGL渲染与几何内核那点事------(二-1-(15))
别再喂垃圾数据了!从3D查看器到AI数据工厂,一位工程师的“数据观”进化四重奏)------OpenGL渲染与几何内核那点事------(二-1-(16))
代码仓库入口:
- github源码地址(https://github.com/AIminminAI/Huhb3D-Viewer)。
- gitee源码地址(https://gitee.com/aiminminai/Huhb3D-Viewer)。
本文涉及:
- https://github.com/AIminminAI/Huhb3D-Viewer/blob/main/src/core/tool_registry.cpp
- https://github.com/AIminminAI/Huhb3D-Viewer/blob/main/src/agent/AIAgentController.cpp
- 如果想像唠嗑一样,去了解一些小知识,快去看看视频吧:
- 认准一个头像,保你不迷路:
- 抖音:搜索“GodWarrior”
- 快手:搜索“AIYWminmin”
- B站:搜索“宇宙第一AIYWM”
您要是也想站在文章开头的巨人的肩膀啦,可以动动您发财的小指头,然后把您的想要展现的名称和公开信息发我,这些信息会跟随每篇文章,屹立在文章的顶部哦
附录:
camera_poses.json
[
{
“frame_id”: 0,
“position”: [0.0, 0.0, 5.0],
“rotation_euler”: [0.0, 0.0, 0.0],
“fov_degrees”: 45.0,
“view_matrix”: [
[1.0, 0.0, 0.0, 0.0],
[0.0, 1.0, 0.0, 0.0],
[0.0, 0.0, 1.0, -5.0],
[0.0, 0.0, 0.0, 1.0]
],
“projection_matrix”: [
[2.414, 0.0, 0.0, 0.0],
[0.0, 2.414, 0.0, 0.0],
[0.0, 0.0, -1.002, -0.200],
[0.0, 0.0, -1.0, 0.0]
]
},
{
“frame_id”: 1,
“position”: [1.18, 0.0, 4.86],
“rotation_euler”: [0.0, -13.6, 0.0],
“fov_degrees”: 45.0,
“view_matrix”: [
[0.972, 0.0, 0.236, -0.0],
[0.0, 1.0, 0.0, 0.0],
[-0.236, 0.0, 0.972, -5.0],
[0.0, 0.0, 0.0, 1.0]
],
“projection_matrix”: [
[2.414, 0.0, 0.0, 0.0],
[0.0, 2.414, 0.0, 0.0],
[0.0, 0.0, -1.002, -0.200],
[0.0, 0.0, -1.0, 0.0]
]
}
]
label_legend.txt
Semantic Label Color Legend
Category -> (R, G, B) in 0-255 range
0 FreeSurface 127 127 127
1 HorizontalPlane 0 0 255
2 LateralPlane_X 0 255 0
3 LateralPlane_Z 255 0 0
4 NearHorizontal 255 255 0
5 NearLateral_X 255 0 255
6 NearLateral_Z 0 255 255
7 Degenerate 255 127 0
8 Reserved1 127 0 255
9 Reserved2 0 127 255
manifest.json
{
“version”: “2.0”,
“generator”: “Huhb3D-SyntheticDataPipeline”,
“rgb_count”: 100,
“mask_count”: 100,
“depth_count”: 0,
“has_legend”: true,
“has_ai_description”: false,
“has_camera_poses”: false
}

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐



 7
7 0
0- 0



 已为社区贡献38条内容
已为社区贡献38条内容

所有评论(0)