DeepStream9.0 nvdsosd 新特性:Mask Blur 与 OBB 旋转框绘制
DeepStream 9.0 的 nvdsosd 增强了两个很实用的显示能力:
- 基于 mask 的局部模糊
- OBB(Oriented Bounding Box)旋转框绘制
这两个功能分别解决两个问题:一个用于隐私保护,一个用于更准确地显示旋转目标检测结果。
1. blur-mask:从模糊矩形框到模糊实例区域
过去如果要做隐私保护,例如模糊人脸、车牌或某类目标,常见做法是模糊整个 bounding box。但 bbox 往往包含大量背景区域,效果不够精细。
DeepStream 9.0 在 nvdsosd 中扩展了 blur-bbox 属性:
g_object_class_install_property (gobject_class, PROP_BLUR_BBOX,
g_param_spec_uint ("blur-bbox", "Blur Bbox",
"Blur mode, (0):Disable, (1)blur the entire bbox area of object,\n"
"\t\t\t(2)Blur the mask area of object if there is a mask, swith to Blur_Bbox if no mask.",
0, 2, 0,
(GParamFlags) (G_PARAM_READWRITE | G_PARAM_STATIC_STRINGS |
GST_PARAM_MUTABLE_READY)));含义是:
blur-bbox=0:不模糊
blur-bbox=1:模糊整个 bbox 区域
blur-bbox=2:如果对象有 mask,则只模糊 mask 区域;如果没有 mask,则退回到 bbox 模糊
这对实例分割模型特别有用。例如模型输出 person mask,nvdsosd 就可以只模糊人的真实轮廓区域,而不是模糊整块矩形背景。
源码中,插件会从 object_meta 里取出 bbox 和 mask:
if (nvdsosd->blur_bbox) {
if(nvdsosd->blur_gie_class_list != NULL) {
for(GList *it = nvdsosd->blur_gie_class_list; it; it = it->next) {
gint gie_id = g_array_index((GArray *)(it->data), gint, 0);
gint class_id = g_array_index((GArray *)(it->data), gint, 1);
GST_LOG_OBJECT (nvdsosd,"blur gie %d class %d \n", gie_id, class_id);
if(object_meta->unique_component_id == gie_id && object_meta->class_id == class_id) {
nvdsosd->blur_rect_params[blur_cnt] = object_meta->rect_params;
nvdsosd->mask_params[blur_cnt] = object_meta->mask_params;最终传给底层 OSD blur 函数:
if (blur_cnt != 0 && nvdsosd->blur_bbox) {
nvdsosd->frame_blur_params->num_rects = blur_cnt;
nvdsosd->frame_blur_params->rect_params_list = nvdsosd->blur_rect_params;
if(nvdsosd->blur_bbox == Blur_Mask)
nvdsosd->frame_blur_params->mask_params_list = nvdsosd->mask_params;底层 nvll_osd 中,blur 只支持 GPU mode:
int nvll_osd_blur_rectangles(NvOSDCtxHandle nvosd_ctx, NvOSD_FrameRectParams *frame_rect_params)
{
int ret = 0;
if(frame_rect_params->mode == MODE_GPU)
{
ret = nvll_osd_blur_rectangles_gpu(nvosd_ctx, frame_rect_params);
} else {
NVOSD_PRINT_E("Blur is only supported on GPU mode, please set the process-mode=1!");所以使用这个功能时要注意:
nvdsosd process-mode 必须是 GPU mode,也就是 process-mode=1
典型使用场景:
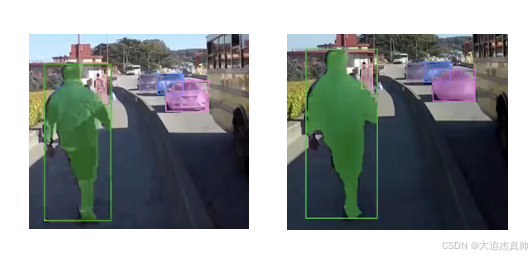
实例分割模型 → object mask → nvdsosd blur-bbox=2 → 只模糊目标轮廓区域
这对于隐私保护很有价值,例如只模糊人脸、人体、车牌、敏感物体区域。
如下图,跟左边的图比起来,右边的mask被模糊了。
2. OBB:支持带角度的旋转矩形框
第二个新功能是 OBB,也就是 Oriented Bounding Box。
传统 bbox 是水平矩形:
left, top, width, height
但很多目标并不是水平放置的,例如:
- 倾斜车辆
- 船只
- 航拍图像中的建筑
- 旋转文本
- YOLO OBB 模型输出的旋转目标
如果仍然用水平 bbox,会包含大量背景,显示不准确。OBB 则多了一个角度信息:
left, top, width, height, rotation_angle
yolov11-obb 就属于这种模型:模型不仅输出框的位置和尺寸,还输出旋转角度。
在 nvll_osd 的 CPU 绘制路径中,如果 rotation_angle 非零,会以矩形中心为旋转中心绘制:
if (fabsf(rect_params->rotation_angle) > 0.001f)
{
width = rect_params->width;
height = rect_params->height;
// Calculate center point for rotation
double center_x = x + width / 2.0;
double center_y = y + height / 2.0;
// Save current transformation matrix
cairo_save(cr);
// Move to center and rotate
cairo_translate(cr, center_x, center_y);
cairo_rotate(cr, rect_params->rotation_angle * G_PI / 180.0);在 GPU 绘制路径中,nvdsosd 会走 cuosd_draw_rotationbox:
if (fabsf(rotation_angle) > 0.001f)
{
// OBB path - use cuosd_draw_rotationbox
float center_x = (x1 + x2) / 2.0f;
float center_y = (y1 + y2) / 2.0f;
int width = x2 - x1;
int height = y2 - y1;
float yaw_rad = rotation_angle * M_PI / 180.0f;
cuosd_draw_rotationbox(ctx->cuosd_context,cuosd_draw_rotationbox 会根据中心点、宽高和旋转角计算四个角点:
void cuosd_draw_rotationbox(
cuOSDContext_t _context, int cx, int cy, int width, int height, float yaw, int thickness, cuOSDColor border_color, bool interpolation, cuOSDColor bg_color
) {
cuOSDContextImpl* context = (cuOSDContextImpl*)_context;
if (border_color.a == 0) return;
// a d
// o
// b c
float pax = -width / 2.0f;这意味着应用不再需要把 OBB 近似成水平框,只要 metadata 中的 rect_params.rotation_angle 被正确设置,nvdsosd 就能画出旋转框。
对应用开发者意味着什么?
使用 blur-mask
如果模型输出 instance mask,并且希望进行更精细的隐私保护,可以配置:
nvdsosd process-mode=1
nvdsosd blur-bbox=2
如果只想模糊某个 GIE 的某些类别,还可以使用:
blur-on-gie-class-ids
它会根据 unique_component_id 和 class_id 过滤目标。
使用 OBB
如果使用 OBB 检测模型,例如 YOLO OBB 系列,需要保证 custom bbox parser 把角度写入检测结果。随后 DeepStream metadata 会把这个角度传到 NvOSD_RectParams.rotation_angle,nvdsosd 负责最终绘制。
对用户来说,OSD 层的使用方式很自然:
模型输出旋转框
→ parser 填充 rotation angle
→ nvinfer 生成 object metadata
→ nvdsosd 根据 rotation_angle 绘制旋转框
如下图,nvdsosd画了一些斜着的bounding boxes.

总结
DeepStream 9.0 的 nvdsosd 新功能让显示层更适合现代视觉 AI 模型:
blur-mask 让隐私保护更精细,从“模糊整个矩形框”升级为“按实例 mask 模糊真实目标区域”。
OBB support 让旋转目标检测结果可以被准确显示,不再需要把旋转目标强行近似成水平 bbox。
这两个能力都体现了一个趋势:DeepStream 的 OSD 不只是画普通框和文字,而是在适配更复杂的视觉模型输出,例如实例分割和旋转框检测。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐



 5
5 0
0- 0



 已为社区贡献9条内容
已为社区贡献9条内容

所有评论(0)