BOYD凸优化2.2:超平面、多面体与半正定锥的几何本质
构建复杂优化模型的前提,是深刻理解其底层的几何可行域。Boyd 的《凸优化》第 2.2 节为我们提供了一整套描述凸集的数学工具,但如何在代数定义与几何直觉之间建立桥梁,是每个初学者的必经之路。本文系统梳理了仿射集与凸集的核心模块,从基础的超平面 (Hyperplanes) 与半空间 (Halfspaces) 出发,逐步延伸至欧几里得球、椭球以及不同度量下的范数锥,并深入剖析了最抽象的半正定锥 (PSD Cone) 的物理意义。希望能为你在探索凸优化算法的道路上,提供一份清晰的几何导航图。
第一部分:超平面与半空间
1. 超平面 (Hyperplane)
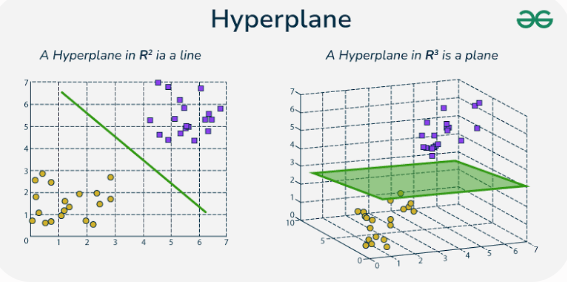
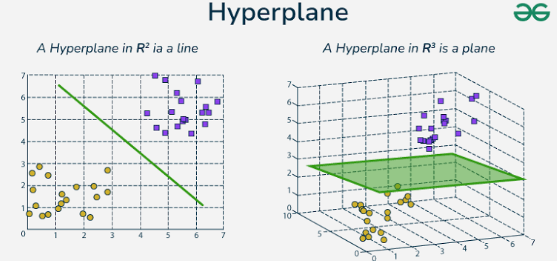
超平面是 维空间中的
维仿射子空间。你可以把它简单理解为降了一维的“平直面”:在二维空间(
)中它是一条直线,在三维空间(
)中它是一个普通的平面。
如绿色的线和绿色的平面,这就是超平面。
数学定义:
其中,常数向量 且
,
。
-
法向量 (Normal Vector)
: 决定了超平面的方向,它垂直于超平面上的任何方向。
-
截距/偏移量
: 决定了超平面距离原点的位置和距离。
为什么需要法向量?(“方向盘”效应)
想象你在空中拿着一张无限大的硬纸板(代表超平面)。你要怎么向别人描述这张纸板倾斜的角度? 因为纸板上有无数个点,而且它向四面八方无限延伸,直接描述纸板本身是非常困难的。
但是,如果你在纸板正中间垂直插一根铅笔(这根铅笔就是法向量),事情就变得无比简单了: 你只要转动铅笔,纸板就会跟着转。铅笔指着什么方向,纸板的倾斜角度也就唯一确定了。
这就是法向量在数学中的核心作用:用一根简单的线(向量),来彻底掌控一个极其复杂的面(超平面)的方向。
我们通常会区分两个符号:一个是向量形式的 ,用来表示单个超平面;另一个是矩阵形式的
,用来表示多个超平面的交集(即仿射集)。
之所以用这种线性方程的形式来表示它们,是因为它完美地将几何直觉与代数计算结合在了一起。主要原因可以归结为以下三点:
1. 几何本质:内积与投影
在几何上,向量的内积(点乘)代表着“投影”。
对于单个超平面 (其中
是列向量,
是变量向量),我们可以根据向量内积的公式将其改写:
两边同时除以向量 的长度
:
的几何意义是:向量
在向量
方向上的投影长度。
这个等式说明:在整个 维空间中,不论点
在哪里,只要它在法向量
方向上的投影长度等于一个常数
,这个点就属于超平面。
2. 约束与自由度(降维)
超平面的定义是 维空间中的
维平坦子空间。用方程
来表示,正好体现了“一个线性方程消减一个自由度”的思想。
-
在没有任何约束时,
可以自由在
个方向上移动(
-
当我们加上一个线性等式约束
时,其中一个变量就可以用其他变量表示出来。系统失去了一个自由度,维度从
,正好形成了一个超平面。
3. 矩阵形式 的强大之处
如果你看到的是大写的矩阵形式 (其中A是
的矩阵,b 是 m 维列向量),它代表的是多个超平面的交集,在凸优化中这被称为仿射集 (Affine Set)。
我们可以把矩阵 A 按行拆解,每一行都是一个行向量 :
这就等价于一个线性方程组:
-
(第 1 个超平面)
-
(第 2 个超平面)
-
...
为什么这种表示法在优化中至关重要?
在凸优化的标准形式中,所有的等式约束都必须写成 Ax = b 的形式。用这种矩阵形式,计算机(求解器)就可以直接运用强大的线性代数工具(如矩阵求逆、高斯消元、奇异值分解等)来高效地寻找满足所有超平面交集的最优解。它将复杂的几何相交问题,彻底转化为了高效的矩阵运算。
2. 半空间 (Halfspace)
任何一个超平面都会将整个 空间一分为二,切割出来的每一半就被称为一个半空间。
数学定义:
闭半空间定义为:
(如果是严格的小于号,则称为开半空间)。
性质: 半空间是凸集,但不是仿射集(因为它不包含穿出它边界的完整直线)。
第二部分:欧几里得球和椭球
1. 欧几里得球 (Euclidean Ball)
欧几里得球就是我们在日常生活中最熟悉的“圆”或“球”的 n 维推广。
数学定义:
-
: 球心(中心点)。
-
: 半径(
)。
-
: 欧几里得范数(也就是我们常说的直线距离,也就是向量的长度)。
几何直觉:
这个公式非常直白,它代表了“空间中所有距离中心点 不超过半径
的点”。
在欧几里得球中,空间中的每一个方向都是“平权”的——无论你从球心朝哪个方向走,走到边界的距离都是相同的 。
2. 椭球 (Ellipsoid)
在现实世界的优化问题中,不同的变量往往有不同的缩放比例或相关性(比如 代表温度,
代表压力,它们的变化范围截然不同)。此时,完美的“球”就不够用了,我们需要它能被拉伸和旋转——这就是椭球。
数学定义(标准形式):
这里出现了一个关键的矩阵 P。P 必须是一个对称正定矩阵(记作 )。
怎么理解这个复杂的式子?
不要被 吓到,它的几何意义极其优美。矩阵
就像是椭球的“基因”,它完全决定了椭球的形状:
-
指向(旋转): 矩阵 P 的特征向量 (Eigenvectors),决定了椭球各个主轴(长轴、短轴)的方向。
-
胖瘦(拉伸): 矩阵 P 的特征值 (Eigenvalues) 的平方根,决定了这些主轴的半长。特征值越大,椭球在这个方向上被拉得越长。
3. 更直观的视角:仿射变换
椭球还有另一种极其直观的表达方式,这也是 Boyd 书中特别强调的:
其中 属于一个标准的单位球,
是一个非奇异矩阵(实际上
)。
这句话翻译成几何画面就是: 怎么在 n维空间里造一个椭球? 你先拿一个最完美的、半径为 1 的橡皮泥圆球(单位球 u)。然后用一个机器(矩阵 A)去挤压、拉伸并旋转这个橡皮泥球,最后把它挪到 的位置。
这种视角揭示了凸优化的一个核心定理:凸集经过仿射变换(线性拉伸+平移)后,依然是凸集。 因为单位球是凸的,所以椭球必然也是凸的。
第三部分:范数球和范数锥
要理解它们,我们只需要做一个思维转换:打破你脑海中对“距离”和“形状”的固有常识。
1. 什么是“范数 (Norm)”?
在日常生活中,我们量距离都是用“皮尺”拉一条直线,这在数学上叫欧几里得距离( 范数)。
但是,如果你在一个像纽约曼哈顿那样横平竖直的城市里,你要从一个街角去另一个街角,你不能穿墙走直线。你只能沿着街道走“折线”。这种计算距离的方式,就是一种新的“尺子”,在数学上叫曼哈顿距离( 范数)。
所以,“范数”本质上就是数学家发明的各种不同的“尺子”,用来重新定义什么叫“长度”或“距离”。
只要满足几个基本规则(比如距离不能是负数,两点之间直线最短等),你就可以发明自己的范数。
2. 范数球 (Norm Ball)
定义:
有了新的尺子,我们就可以重新定义“球”。
这个公式的意思是:用你选定的那把“尺子”(),量出所有距离中心点
小于等于
的点,把它们包起来,这就是一个“范数球”。
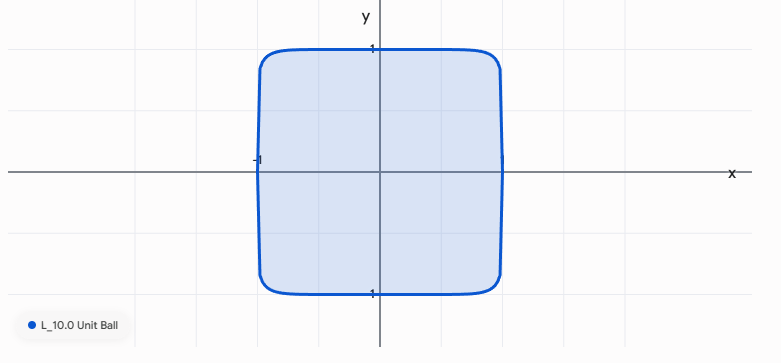
视觉震撼(二维平面下的不同范数球):
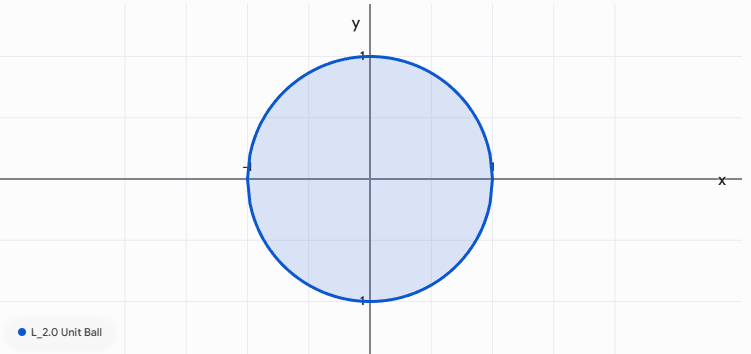
如果你把中心点定在原点 (0,0),半径设为 1,在不同的尺子下,这个“球”会长得完全不一样:
-
范数(欧几里得):
。这就是我们最熟悉的圆。
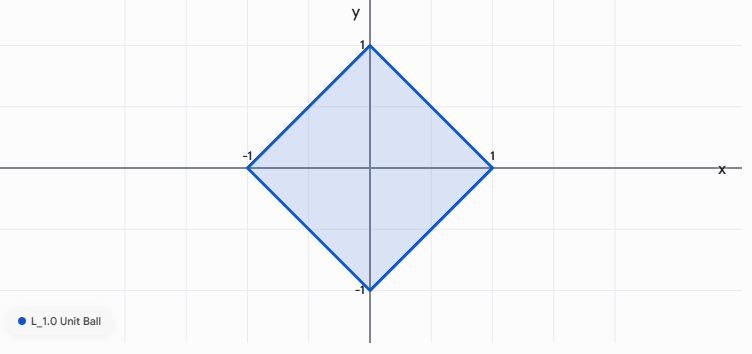
-
-
范数(曼哈顿):
。因为你只能走格子,这个球在二维画出来是一个正方形(倾斜的菱形)。
-
-
范数(最大值):
。只要横向和纵向任何一个方向的距离不超过 1 就可以。它画出来是一个正放的正方形。
核心结论: 范数球一定是凸集。你在机器学习中听过的 L1 正则化(Lasso)和 L2 正则化(Ridge),本质上就是把解限制在菱形的
3. 范数锥 (Norm Cone)
如果说范数球是平面的,那范数锥就是把平面拉升到更高维。
定义:
这里,原本的向量 x 是 n 维的,我们硬生生给它加上了一个新的维度 t(你可以把它想象成“高度”或者“时间”)。
原来我们在二维平面(地板)上研究 x,有横坐标和纵坐标。
现在,范数锥的定义里多了一个变量 t:。
你不要把 t 想得太复杂,就把 t 当作“高度(Z 轴)”,或者说是一部垂直向上开的电梯。
公式里唯一的核心规则就是:。 把这句话翻译成大白话就是:“你的高度 (t),决定了你能在水平面上跑多远 (
)。”
我们跟着电梯往上走,看看你允许活动的范围(也就是范数球)是怎么变化的:
-
当电梯在地面 (t = 0):
根据规则,你水平活动的距离不能超过 0(
)。所以你被死死钉在原点,动弹不得。此时你的活动范围是一个点。
-
当电梯上升到 1 楼 (t = 1):
规则变成了
。现在允许你以电梯井为中心,向四周走 1 米的距离。如果你用的是最普通的直线距离(
-
-
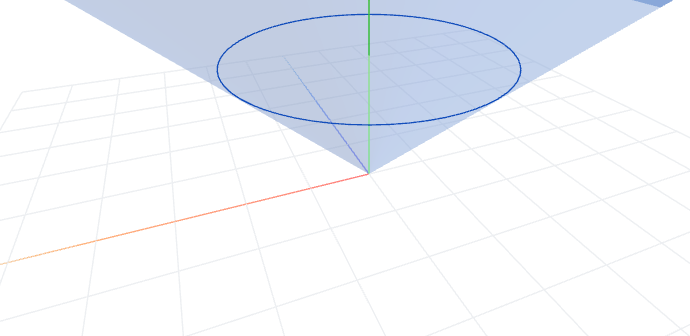
当电梯上升到 5 楼 (t = 5):
规则变成了
。你现在可以在水平方向上走 5 米了,踩出来的范围是一个半径为 5 的大圆。
见证奇迹的时刻:
如果你把电梯在每一层允许你活动的“圆”用一张皮包起来,从地面的“点”,到 1 楼的“小圆”,再到 5 楼的“大圆”……这张皮包裹出来的立体形状是什么?
就是一个倒立的冰淇淋蛋筒。
这就是 范数锥(也就是大名鼎鼎的“二阶锥”,Second-Order Cone)。
怎么在脑海中画出这个锥? 公式 翻译成大白话就是:在高度为
的那一层,你切下来的横截面,必须是一个半径为
的范数球。
-
当高度 t = 0 时,半径是 0,也就是原点的一个点。
-
当高度 t = 1时,横截面是一个半径为 1 的范数球。
-
当高度 t = 2 时,横截面是一个半径为 2 的范数球。
因为半径 t 是随着高度 t 线性增加的,所以你把这些截面一层层叠起来,自然就形成了一个倒立的圆锥(或方锥)!
最著名的例子:二阶锥 (Second-Order Cone, SOC) 如果我们在底层使用大家最熟悉的 范数(欧几里得距离),那么
画出来就是一个完美的、光滑的冰淇淋蛋筒。这在凸优化中非常重要,因为有一整类极其强大的优化问题叫做“二阶锥规划 (SOCP)”,就是在这个冰淇淋筒里找最优解。
第四部分:多面体
如果说超平面是用来切割空间的“刀”,半空间是切完后扔掉一半剩下的“半块空间”,那么多面体,就是你拿着刀在空间里横七竖八切了很多刀之后,最后剩下的那块核心区域。
1. 数学定义:半空间与超平面的交集
在凸优化中,多面体 被严格定义为有限个线性等式(超平面)和线性不等式(半空间)的交集。
用矩阵的形式写出来,就是这个非常经典的标准公式:
不要被符号吓到,我们把它拆解开来看:
-
(等式约束): 就像我们之前说的,矩阵的每一行
都是一个超平面。这代表多面体必须严格“扁平化”地躺在这些平面上。
-
(不等式约束): 矩阵
的每一行
都是一个半空间。符号
表示对向量的每一个分量都满足小于等于。这代表你要在这
个半空间的重叠区域内活动。
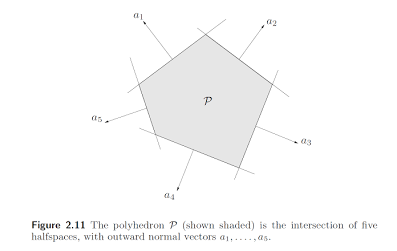
如图所示,矩阵 A 的每一行提供了一个向外的法向量 。多面体
就是那些“被所有法向量指向反方向”的点的集合。因为超平面和半空间都是凸集,它们的交集必然也是凸集。因此,多面体一定是凸集。
第五部分:最终BOSS-半正定锥
在 Boyd 的书里,前面讲的超平面、球、椭球、多面体,它们的变量都是向量 。 但当你看到半正定锥 (Positive Semidefinite Cone, 简称 PSD Cone) 时,你需要做一个巨大的思维跳跃:这里的“点”,不再是向量,而是一个矩阵。
我们一步步来拆解这个概念,你会发现它其实和我们前面聊的“椭球”和“冰淇淋锥”完美呼应。
1. 舞台的转换:矩阵变成了空间里的“点”
我们先限制一下讨论范围:半正定锥只针对对称矩阵(记作 )。
为了让你能在脑海里画出图来,我们拿最简单的 对称矩阵举例:
因为是对称的,右上角和左下角都是 。
这个矩阵有 3 个独立变化的数字:。
核心顿悟: 既然有 3 个独立变量,我们完全可以把这个 的矩阵,看作是 三维空间
中的一个点!
空间里的每一个点,都对应着一个对称矩阵。
2. 什么是“半正定” (Positive Semidefinite, PSD)?
在代数上,如果一个对称矩阵 是半正定的(记作
),它必须满足对任意向量
:
这公式看着枯燥,但如果我们把它和刚刚讲过的“椭球”联系起来,它的几何意义就绝美了:
-
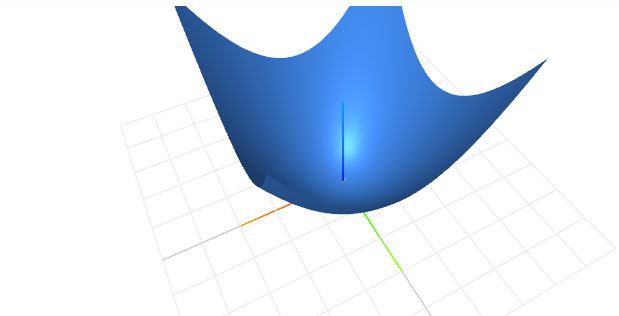
还记得椭球的公式里有个矩阵 P 吗?如果 X 是正定的,那么函数
在高维空间里画出来,就是一个完美的、开口向上的大碗(抛物面)。你把切面切开,就是椭球。
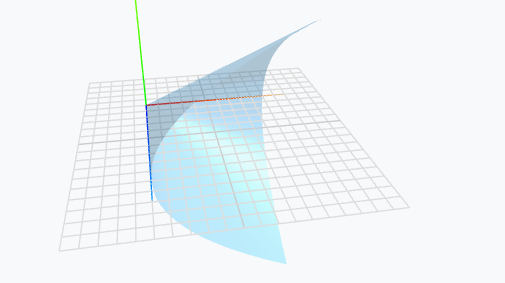
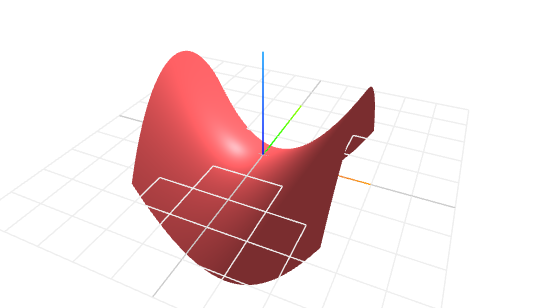
-
如果 X 有负的特征值(不是半正定),这个“碗”就会变形,有的方向向上弯,有的方向向下弯,变成一个马鞍的形状(像品客薯片)。
所以,要求一个矩阵是“半正定”的,物理意义就是:我们要把所有那些“形状像薯片”的矩阵统统扔掉,只保留那些“形状像一口好碗”的矩阵。
3. 为什么它叫“锥”?(见证奇迹的时刻)
我们把“半正定”的条件,套用到刚才那个 矩阵的三维空间
里,看看会切出一个什么形状。
线性代数告诉我们,一个 矩阵半正定的充要条件是:
-
对角线元素大于等于 0:
-
行列式大于等于 0:
我们把第二个条件稍微移一下项:
你盯着这个公式看,它像什么?
它就是我们在上一节聊“范数锥”时提到的冰淇淋蛋筒!
在 这个三维空间里:
-
和
限定了我们只看空间的第一卦限(高度为正)。
-
边界条件
画出来,正是一个光滑的、无限延伸的圆锥体。
-
就是这个圆锥体的内部。
总结: 为什么叫半正定锥?因为当你把矩阵的元素当成空间的坐标时,所有满足半正定条件的矩阵,在空间中严丝合缝地拼成了一个完美的三维锥体!在这个锥体内部的点,代表“好碗”矩阵;锥体外部的点,代表“薯片”矩阵。
关于抽象理解
咱们换一个完全没有数学公式的视角。想象你现在正在调试一个用来生成 3D 地形的 API 接口,这个接口只需要你传入 3 个参数:x, y, z。
1. API 的两种输出:“碗”与“薯片”
当你把这三个参数 (x, y, z) 传给接口后,屏幕上只会渲染出两种形状的地形:
-
第一种地形:完美的“碗”。 这是一个四周高、中间低的形状。如果你往里面倒水,水会乖乖聚在谷底。这种地形非常稳定,你在任何一个方向往上走,都是在“爬坡”。
-
-
第二种地形:“品客薯片”(马鞍形)。 这个形状很扭曲。如果你站在最中间,往前后走是下坡,往左右走却是上坡。如果你往里面倒水,水会直接从两边漏光。这种地形非常不稳定。
-
2. 什么是“半正定” (PSD)?
“半正定”其实就是一个系统安全校验标签。
在优化算法的世界里,算法非常害怕“薯片”这种地形,因为水(数据)会漏掉,算法会找不到最低点,直接崩溃。算法只喜欢“碗”这种永远能兜住底的地形。
所以,如果某一组参数 (x, y, z) 调用 API 后,生成的是一个“碗”,我们就给这组参数贴上一个标签:认证通过,这是“半正定”的! 如果生成的是“薯片”,我们就把它打回票。
3. 为什么最后变成了一个“锥”?
现在,你想把这个 API 彻底摸透。你在三维空间里建了一个坐标系:横轴是 x,纵轴是 y,高度是 z。
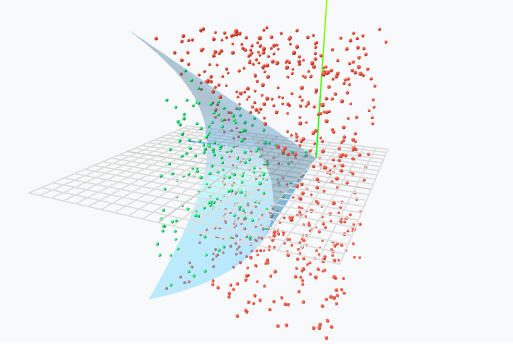
你写了一个自动化脚本,把空间里成千上万个点 (x, y, z) 全部塞进 API 测了一遍:
-
只要返回是“碗”(半正定),你就在空间里的那个位置,亮起一盏绿灯。
-
只要返回是“薯片”,你就亮起一盏红灯。
跑完几万次测试后,你退后一步,看看这间屋子。
空间里所有亮着绿灯的点,并没有东一个西一个地乱跑,而是严丝合缝地聚在一起,堆成了一个巨大的、倒立的“冰淇淋蛋筒”形状。
这个由所有“能生成碗的参数”堆出来的巨型三维圆锥体,就是数学家口中的——半正定锥 (PSD Cone)。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐


 17
17 0
0- 0



 已为社区贡献29条内容
已为社区贡献29条内容

所有评论(0)