【课题推荐与代码介绍】卡尔曼滤波器正反向估计算法原理与MATLAB实现
·

课题说明:本课题面向信号处理与状态估计方向的学习者,以一维动态系统为例,系统讲解卡尔曼滤波(Kalman Filter)的正向滤波与反向平滑(RTS Smoother)的算法原理、数学推导及 MATLAB 编程实现,帮助学习者建立从理论到代码的完整认知链路。
课题背景与意义
在工程实践中,系统状态往往无法直接观测,只能通过带噪声的传感器测量值间接推断。卡尔曼滤波器是一种递推最优估计算法,能够在高斯噪声假设下,以最小均方误差估计系统的隐含状态。
其核心优势在于:
- 实时性强:正向滤波可在每个时间步递推计算,无需存储所有历史数据。
- 平滑性优越:在所有观测数据已知的离线场景下,通过反向平滑可进一步提升估计精度。
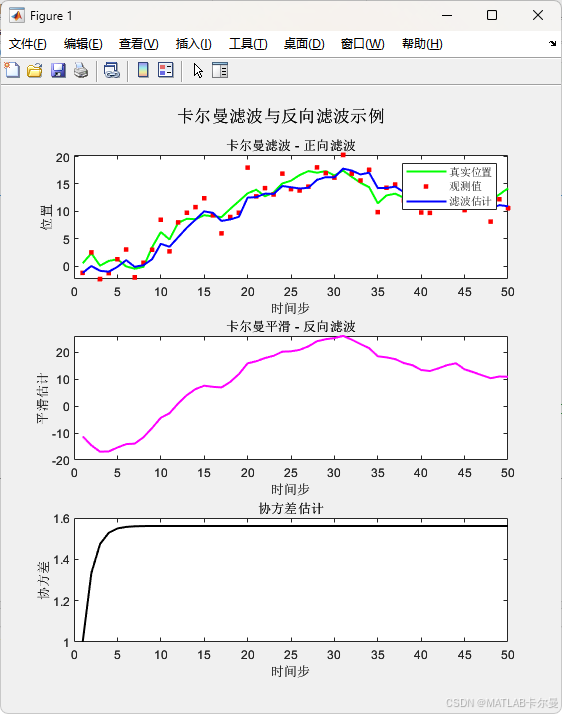
本课题以一维随机游走系统为仿真对象,完整演示正向滤波与反向平滑的全流程实现。
系统模型定义
| 符号 | 含义 | 本例取值 |
|---|---|---|
| x k x_k xk | k k k 时刻系统状态(位置) | — |
| A A A | 状态转移矩阵 | 1 1 1(匀速模型) |
| H H H | 观测矩阵 | 1 1 1(直接观测) |
| Q Q Q | 过程噪声协方差 | 1 1 1 |
| R R R | 观测噪声协方差 | 4 4 4(噪声较大) |
MATLAB代码实现
代码运行结果:
模块说明
| 代码段 | 对应算法步骤 | 关键变量 |
|---|---|---|
| 第一步 | 仿真数据生成 | true_position, measurements |
| 第二步 | 模型参数配置 | A, H, Q, R |
| 第三步 | 滤波器初始化 | x_hat(1), P(1) |
| 第四步 | 正向递推滤波 | x_hat(k), P(k), K |
| 第五步 | 反向 RTS 平滑 | x_smooth(k), J |
| 第六步 | 可视化输出 | 三子图对比 |
代码获取
扩展方向
- 深度融合神经网络的混合滤波架构(KalmanNet)
- 变分推断卡尔曼滤波与贝叶斯深度学习
- 分布式/联邦卡尔曼滤波与多智能体协同感知
- 自适应噪声估计与鲁棒卡尔曼滤波
如有代码定制或算法讲解需求,欢迎进一步交流。⬇️

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐



 12
12 0
0- 0



 已为社区贡献35条内容
已为社区贡献35条内容

所有评论(0)