CS188 Note2 学习笔记
·
更好的阅读体验
Search Problem的六要素
• A state space - The set of all possible states that are possible in your given world
• A set of actions available in each state
• A transition model - Outputs the next state when a specific action is taken at current state
• An action cost - Incurred when moving from one state to another after applying an action
• A start state - The state in which an agent exists initially
• A goal test - A function that takes a state as input, and determines whether it is a goal state
State Space Size
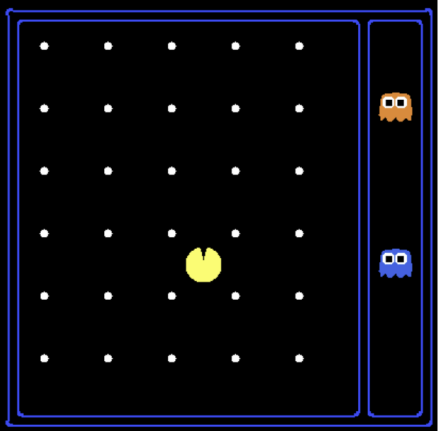
• Pacman positions - Pacman can be in 120 distinct (x, y) positions, and there is only one Pacman
• Pacman Direction - this can be North, South, East, or West, for a total of 4 possibilities
• Ghost positions - There are two ghosts, each of which can be in 12 distinct (x, y) positions
• Food pellet configurations - There are 30 food pellets, each of which can be eaten or not eaten
整体数量:120 × 4 × 12² × 2³⁰ 数量旁大无法存储
State Space Graph vs Search Tree
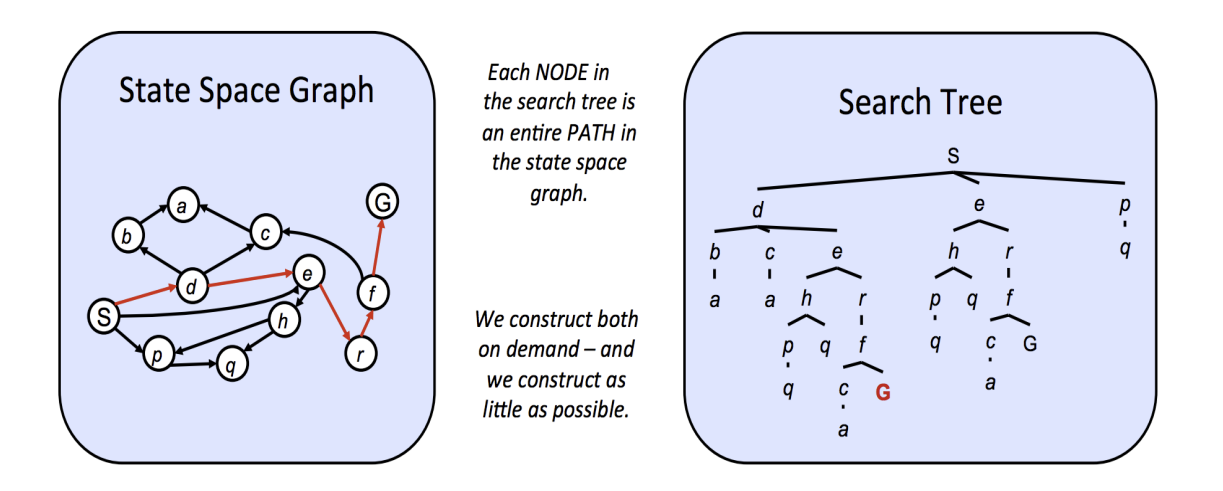
State Space Graph(概念上的完整图)
- 每一个 state 只出现一次
- 边表示动作
- 边上可以存放代价
- 是一个概念性的模型,几乎从不完全构造出来 因为状态太多了
Search Tree(实际搜索用的结构)
- 每一次搜索都会从起点不断扩展“路径”
- 同一个 state 可以出现多次,因为路径不同
例:
从 A 到 C 可以走 A→B→C 或 A→D→C,这两条路径会产生两个不同的 Tree Node(尽管状态 C 相同)。
Search Tree 是 路径树,节点包含:
- 当前 state
- 到达该 state 的路径
- path cost(累计代价)
- parent(用于回溯路径)
Uninformed Search
| 属性 | DFS | BFS | UCS |
|---|---|---|---|
| Frontier | Stack | Queue | Priority Queue |
| Completeness | No | Yes | Yes |
| Optimal | No | Yes(等代价) | Yes |
| Time | O(b^m) | O(b^s) | O(b^(C*/ε)) |
| Space | O(bm) | O(b^s) | O(b^(C*/ε)) |
| 优点 | 空间低 | 找最短步数 | 最优解 |
| 缺点 | 容易迷路 | 空间爆炸 | 时间可能很高 |
Tip:(C = 最优路径代价,ε = 最小代价)*

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐



 21
21 0
0- 0



 已为社区贡献5条内容
已为社区贡献5条内容

所有评论(0)