AI+系列:AI给的代码有坑,咋避坑系列-《AI帮忙写光追,差点把CPU送进ICU——BVH构建的血泪进化史》- 三-1-(6)
@[TOC]AI+系列:AI给的代码有坑,咋避坑系列-《AI帮忙写光追,差点把CPU送进ICU——BVH构建的血泪进化史》- 三-1-(6):
背景:机器人训练数据贵、慢、标注难???
试想一下,如果你是一个造机器人的工程师,想让机器人的 AI 视觉大模型学会精准抓取一个螺栓,你需要多少张照片来训练它? 答案是: 成千上万张不同角度、带有精准像素级标注的照片。【同时,真实世界中采集带标注的三维数据成本极高,我们称之为 Sim2Real(仿真到现实)的鸿沟。】
手工一张张拍?人工用鼠标去抠图?这得干到猴年马月! 为了解决这个痛点,用一台普通电脑,把 STEP 模型自动渲染成 100 张带像素级 Mask 的训练图(含 camera pose、COCO 格式)
解决方案:
- 只要丢给它一个工业 CAD 模型(比如 STL文件),它就能自动在虚拟空间中 360° 环绕拍照,瞬间吐出:
- 📸 RGB 真实渲染图:rgb/frame_XXXX.png
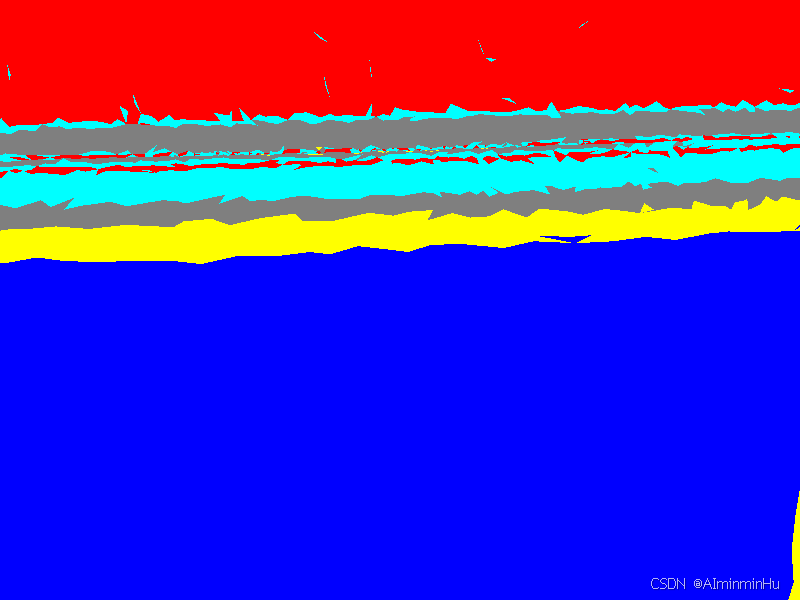
- 🏷️ 像素级语义分割 Mask (基于曲率算法,自动认出哪里是螺栓、孔洞、法兰):mask/mask_XXXX.png
- 📏 深度图(Depth) (告诉机器人距离多远),depth/depth_XXXX.png + .raw
- 📐 6DoF 相机位姿 (告诉机器人从哪个角度抓),camera_poses.json
- 📂 最后直接打包成 AI 训练最爱吃的 COCO/YOLO 格式。
- label_legend.txt【类别ID→名称→RGB颜色映射】、description.json【DeepSeek-V3 视觉API生成零件特征描述】
实际效果:
- 想看视频:
huhb_synthetic_data
- 不想看视频:也有图片:

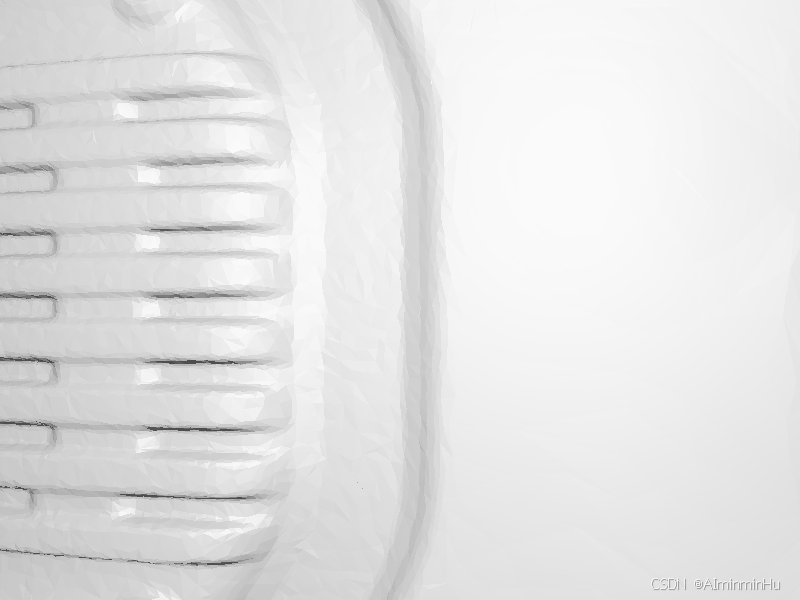




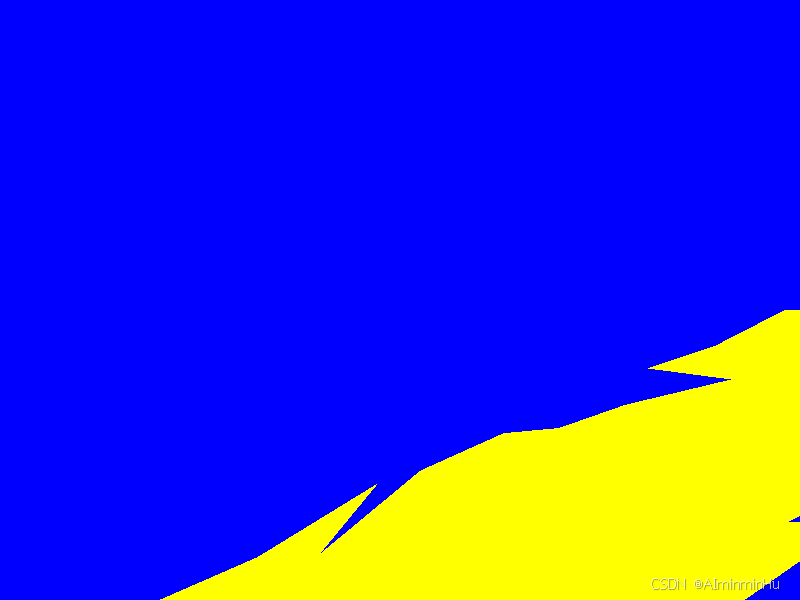

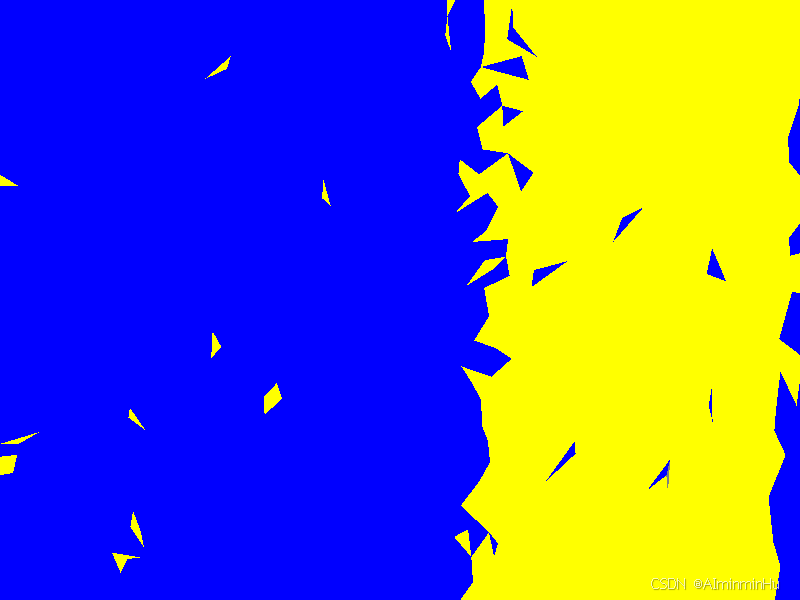

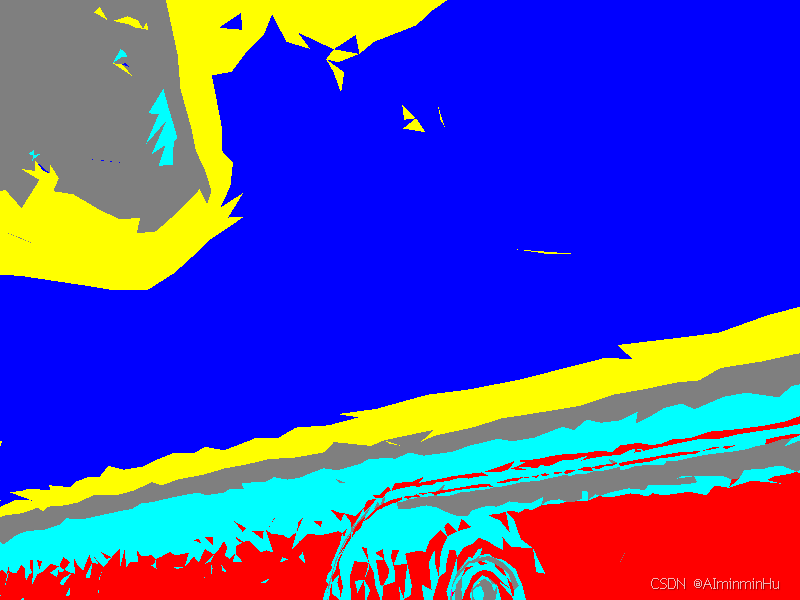
【还有附带的:camera_poses.json、label_legend.txt、manifest.json,具体内容见附录】
巨人的肩膀:
- OpenGL 4.6 Specification
- Vulkan 1.3 Specification
- Khronos Group SPIR-V Whitepaper
- 历代GPU架构白皮书(NVIDIA Fermi至Blackwell,AMD GCN至RDNA 4)
系列文章规划:
- ((AI升级篇)OpenGL渲染与几何内核那点事-(二-1-(14):你的3D查看器,是怎么一步步先试着造个数据工厂,向学会“教”机器人看世界的而努力)
- (让 C++ 程序长出大脑:从“语音遥控器”到具身智能 Agent 的进化之路)------OpenGL渲染与几何内核那点事------(二-1-(15))
别再喂垃圾数据了!从3D查看器到AI数据工厂,一位工程师的“数据观”进化四重奏)------OpenGL渲染与几何内核那点事------(二-1-(16)) - AI+系列:AI给的代码有坑,咋避坑系列-《AI 写的 C++ 内存池,差点让我的数据工厂原地爆炸》- 三-1-(5):
- AI+【(实践出真知-Coze)你的智能体,从“人工智障”到“全能Agent”,从“鹦鹉学舌”到“数字员工”的进化史 —— 一个技术人的破局手记:Coze进化史里藏着每个程序员的破局点】系列:
数据工厂还缺一双“硬核”的眼睛
自从你的数据工厂能自动吐出 RGB 图、语义 Mask、深度图和 6DoF 位姿之后,AI 部门的人简直把你当神一样供着。小李做抓取,小张做分割,连新来的实习生都学会了双击打包 COCO 数据集。
但好景不长,有一天小李神秘兮兮地敲开了你的门:“哥,数据我看了,棒!但有一个问题——你的渲染用的还是传统光栅化。我们想训一个基于光线追踪的反射去噪网络,需要真实的全局光照、软阴影和焦散。你那工厂能不能再进化一下,支持光线追踪?”
你一听,头都大了。光线追踪的核心是加速结构,而加速结构的心脏,就是那个令无数图形程序员又爱又恨的——BVH(层次包围盒,Bounding Volume Hierarchy)。
“怕啥,让 AI 帮我写!”你自信地打开了 Copilot,又打开了Claude code,还打开了Codex,最终还决定翻个牌子,准备摸一把鱼。结果,AI 交上来的代码,差点没把你的 32 核线程撕裂者给干冒烟……
下面,带着 AI 写 BVH,看看一路咋踩坑、一路又咋填坑。
🟢 第一代:最天真的空间递归二分法——AI 写的第一个版本就把栈撑爆了
你第一次跟 AI 说:“帮我写个 BVH 构建函数,用递归把三角形按照包围盒中心左右分开就行。” AI 秒回,代码长得像模像样:
BVHNode* build_recursive(std::vector<Triangle>& triangles, int start, int end) {
BVHNode* node = new BVHNode();
int num_triangles = end - start;
if (num_triangles <= MIN_TRIANGLES_PER_LEAF) {
node->leaf = true;
// 填充叶子节点数据...
return node;
}
// 计算包围盒中心并划分左右区间
int mid = (start + end) / 2;
node->left = build_recursive(triangles, start, mid);
node->right = build_recursive(triangles, mid, end);
return node;
}
你瞟了一眼,没毛病啊,递归终止条件都写了。于是欢天喜地地丢了一个有 50 万个三角形的机械零件进去。然后,程序直接 Stack Overflow 崩溃了。
💥 为什么会崩?AI 的思维盲区在哪儿?
你火急火燎地打断点查调用栈,发现递归深度居然冲到了几万层!根本原因出在你的零件模型里有很多退化三角形(三个顶点共线,面积为零)以及重合的薄片(同一位置叠了好几层)。这些“垃圾几何体”的包围盒中心计算出来完全一样,无论你怎么左右划分,mid 总是把所有三角形推进同一侧。于是,下一层递归的 start 和 end 完全没变,递归就变成了死循环,直到撑爆栈空间。
AI 的训练数据里全是干干净净的“理想几何体”,它根本不知道真实世界的 CAD 模型有多么“脏”。它默认递归总有一天会自然结束,却从来没想过要加一道最大深度的保险丝。
于是你补了一行救命的代码:
if (depth >= MAX_DEPTH) {
node->leaf = true;
return node;
}
这下世界清净了。
深度解析:分治递归的生存法则
1. BVH 的起源与本质
- BVH 最早可以追溯到 1986 年 Kay 和 Kajiya 的论文,用来加速光线追踪。它的核心思想是:用一个简单的几何体(通常是最小轴对齐包围盒 AABB)把一组复杂的几何图元包起来。光线先和这个包围盒求交,不中就直接跳过整组图元,不用一个个三角形去算。这本质上是一种空间层级划分。
- 在计算机科学里,BVH 是经典的 分治算法 应用:把问题规模不断对半缩小,直到可以直接暴力求解(比如一个叶子节点里就剩 4 个三角形)。但分治算法能在数学上成立,有一个隐含的前提:问题必须真的在缩小。一旦输入的几何数据破坏了“均匀可分”的假设(比如大量重合图元),递归就会变成重蹈覆辙的死环。
- 最大深度(max_depth) 和 最小分裂增益 是工业级代码里绝对不可省略的“逃生舱”。前者在深度超过一定阈值(比如 64)时强制转为叶子节点;后者则保证只有当划分能明显减少 SAH 代价时才继续分裂。这两条是写给那些“意外情况”的,而真实世界里的意外,远比教科书上来得多。
2. 退化三角形的血泪史
- 退化三角形(Degenerate Triangle)在 CAD 数据的转换过程中无处不在:STEP 转 STL 的容差丢失、布尔运算残留的零面积碎片、甚至扫描数据的重叠区域。对 BVH 构建器来说,它们就是“递归毒药”。如果不显式过滤或强制终止,再美的代码也会被它们拖入无尽深渊。
- 正确的工程态度是:永远假设输入数据有缺陷。这跟 AI 那种“沐浴在完美数学世界”里的思维惯性是截然相反的。
🟡 第二代:引入 SAH 之后——AI 的“数学正义感”反而带来了死锁
你把第一代的坑填上后,BVH 能跑了,但渲染速度还是慢得像在拨号上网时代看图片。请教隔壁图形大佬,对方只说了三个字母:SAH。
你转述给 AI:“在划分左右子树的时候,不要简单粗暴地对半分,要用 表面积启发式算法(Surface Area Heuristic) 去找一个最优的分裂位置,让光线与包围盒的相交概率最小。”
AI 再一次展现出了它的“学术气质”,洋洋洒洒写了一大段计算最小 SAH 代价的代码,并找出了那个“命中注定”的 split_index。然后,它继续用那套不加保护的老逻辑:
int split_index = find_best_sah_split(triangles, start, end);
node->left = build_recursive(triangles, start, split_index);
node->right = build_recursive(triangles, split_index, end);
你信心满满地换上了新的零件模型——一个特别长的曲轴。结果,CPU 的一个核心直接飙到 100%,程序卡死不动了。
💥 为什么数学上的最优解,反而成了死锁?
你用调试器追踪到 split_index,赫然发现,对于曲轴的某些极端包围盒(一个方向上极长,另两个方向极短),SAH 计算出来的全局最小代价,竟然对应着 把所有三角形都划到右边,左边一个不留——也就是 split_index == start。或者反过来,全划到左边,split_index == end。
于是,递归调用又一次被传入了完全相同的 [start, end] 区间,又一次义无反顾地冲进了无限递归。
AI 的思维盲区这一次暴露得更彻底:它把 SAH 当成宗教信条了。它坚信那个数值上最小的 cost,在工程上也一定是“正确”的划分。它不知道,在图形学里,理论最优解如果导致算法无法收敛,那就得果断被废弃。
你无奈地补上了人类特有的“功利主义兜底”:
if (split_index == start || split_index == end) {
split_index = start + num_triangles / 2; // 强制对半砍,保底
}
深度解析:SAH 的前世今生与工程哲学
1. SAH(Surface Area Heuristic)为什么能加速?
- 1987 年,Goldsmith 和 Salmon 提出了用表面积来近似光线击中包围盒的概率:在均匀光线分布下,一条随机光线击中某包围盒的概率,与该包围盒的表面积成正比。于是 SAH 的代价函数为:
[
C = C_{\text{trav}} + P_A \cdot C_A + P_B \cdot C_B
]
其中 (P_A, P_B) 分别是光线击中左右子包围盒的概率(由两者表面积比上父包围盒表面积得到)。通过枚举所有可能的分裂平面,找到使 (C) 最小的那个,理论上就能得到全局最优的遍历顺序。- 然而,SAH 最优的前提是“几何分布均匀、光线分布均匀”。在极端各向异性的模型(长轴零件、层状结构)面前,SAH 给出的最优划分极有可能是高度不对称甚至极端退化的。此时,理论最优和工程可解之间出现了鸿沟。
2. 为什么 AI 会在这上面摔得这么狠?
- AI 在生成代码时,最擅长的是复现“标准流程”:计算 cost → 取最小值 → 返回索引。但真实工程中,流程之外还有大量的异常路径守卫。这些守卫通常不会出现在论文和干净的教程代码里,而是散落在图形引擎的 commit log 和 bug report 中。AI 缺少的就是这些“泥地里滚出来的经验”。
- 工业级 BVH 构建器(如 Embree、OptiX)在 SAH 之外普遍搭配 分割终止试探(split stopping heuristic) 和 最大代价阈值。如果最优划分的代价甚至比直接做叶子节点还高,或者左右子树三角形数量比为 1:N 且 N 极大,就会直接放弃划分。这些妥协不是数学的失败,而是工程师对物理计算资源的尊重。
🟠 第三代:桶式装箱法——AI 又一次忘记了浮点数不是实数
第二代安全了,但构建速度慢到让你去冲了杯咖啡回来还在跑。原因很简单:find_best_sah_split 要对每一个三角形的中心点都做一次排序,复杂度是 (O(n \log n))。场景里有几百万三角形时,光构建 BVH 就要花掉近一分钟。
“用 Bucket Binning SAH!” 你又给 AI 下达了新指令:把包围盒沿最长轴分成固定数量的桶(比如 16 个),只把三角形投进桶里,然后在这 16 个桶的分界线上找最优 SAH 分裂点,复杂度直接降到 (O(n))。
AI 再次不负众望地写出了核心投影代码:
float t = (centroid.axis - centroid_bounds.min.axis) /
(centroid_bounds.max.axis - centroid_bounds.min.axis);
int bucket_index = static_cast<int>(t * num_buckets);
buckets[bucket_index].add(triangle); // 💥 随机崩!
你拿一个有几万个三角形的标准齿轮试,没问题。一换成包含精密微小薄片的高精模型,程序瞬间 Segmentation fault 内存越界崩掉。
💥 不是数学的错,是浮点数的“舍入误差”在报复你
你用 printf 把 t 打出来,发现当某个三角形中心恰好落在极大包围盒的右边界上时,由于除法引入了微小的向上舍入,t 的值变成了 1.00000012。乘以 16 得到 16.000002,static_cast<int> 直接截断成整数 16。而你的 buckets 数组只有 0 到 15 共 16 个位置,访问 buckets[16] 自然就是越界。
AI 的数学世界观里,t 就应该是 ([0, 1]) 区间的一个完美实数。但现实的 IEEE 754 单精度浮点数是一个离散的有限集合,边界处的“差一点”时有发生。AI 永远不会替你写那个锁边界的 std::min。
你再次手动补丁:
int bucket_index = std::min(num_buckets - 1,
static_cast<int>(t * num_buckets));
深度解析:浮点数的精密度量
1. IEEE 754 的“脏地板”
- 单精度浮点数(
float)有 23 位尾数,能提供大约 7 位十进制有效数字。这意味着任何计算的结果都是一个四舍五入后的近似值。当你把a / b的结果再乘以num_buckets,每一步都可能带来 0.5 ULP(最小精度单位)的误差。在边界处,这些误差足够把0.99999994推到1.00000012。- 更隐蔽的是,当
centroid_bounds.max.axis - centroid_bounds.min.axis极大,而centroid.axis又非常靠近max时,这个除法实际上在做相近数相减,会导致灾难性消除(Catastrophic Cancellation),进一步放大误差。这些坑在数值分析课上都会讲,但在 AI 的语料里,只是被当成“无伤大雅的细节”一笔带过了。2. 工程防御:永远给映射操作上锁
- 把连续值映射到离散索引时,**夹逼(clamp)**是唯一的正确答案。
std::clamp或std::min/std::max组合必须像出门带钥匙一样成为本能。- 另一个更稳健的策略是:永远保留一个“溢出桶”。但通常直接用
std::min截断性能最佳,也足够安全。
🔵 第四代:追求极致吞吐量——AI 在 std::sort 里埋了一颗性能核弹
前三代的坑填平之后,你的 BVH 构建器终于既稳定又正确了。但是,你用 VTune 一跑,构建时间依然是你心里的痛:每次递归做桶式划分时,对于划分轴上的三角形排序,占用了整整 60% 的时间。
你决定最后再信 AI 一次,让它优化排序部分。AI 非常优雅地写出了下面这段:
std::sort(triangles.begin() + start, triangles.begin() + end,
[](const Triangle& a, const Triangle& b) {
return a.get_bounds().centroid().axis < b.get_bounds().centroid().axis;
});
代码读起来像诗:简洁、OOP、高内聚。你没有多想就合入了主线。然后,跑分对比让你傻眼:构建速度比隔壁用 Embree 的 demo 慢了整整 5 倍。
💥 OOP 的优雅,在此刻化作了 CPU 的噩梦
问题出在那个看似人畜无害的 a.get_bounds() 调用上。std::sort 的比较函数会被调用 (O(n \log n)) 次,对于 200 万个三角形,这是几千万次的调用。每次比较,AI 写的这个 lambda 都会:
- 在栈上构造一个新的临时包围盒对象(
get_bounds()很可能返回值而非引用)。 - 调用
centroid()再计算一次中心坐标。 - 析构该临时对象。
这意味着几千万次无效的对象构造、内存读写和析构。更致命的是,这些操作完全破坏了 CPU 缓存的数据局部性:排序过程中,本来 CPU 可以专注于紧凑的键值对比,现在却要频繁去主存里抓取三角形的包围盒数据,导致 Cache Miss 爆表。
AI 总是倾向于写出面向对象、干净分层的代码,这是它从海量高级语言教程里学来的“美学”。但在需要压榨每一条指令的底层系统编程里,这种美学就是性能的慢性毒药。
工业界的做法跟你手改后的代码一样:在排序前,预先分配一段连续内存,把所有三角形的中心坐标投影值预计算好,然后对索引数组排序。比较函数变成:
std::sort(indices.begin(), indices.end(),
[&precomputed_vals](int i, int j) {
return precomputed_vals[i] < precomputed_vals[j];
});
没有任何对象构造,内存访问连续平铺。性能直接回到了工业级水准。
深度解析:Data-Oriented Design 与 CPU 的亲密关系
1. 面向对象 vs. 面向数据
- 面向对象(OOP)的核心是封装,它把数据和操作绑在一起,在业务逻辑层面能极大降低心智负担。但在密集计算的热路径上,OOP 带来的间接访问(虚函数、指针跳转)和隐藏的临时对象构造,是性能的头号杀手。
- 面向数据设计(DOD)的核心思想截然相反:先考虑数据在内存中的布局和访问模式,再根据这个布局去写算法。对于 BVH 排序这一热点,DOD 的做法就是把需要的键值(投影坐标)单独拎出来放到一个平坦数组里,只对这个数组或对应的索引进行操作。这样做才能充分利用现代 CPU 的预取器(Prefetcher) 和缓存行(Cache Line,通常 64 字节)——一次加载就能带进来后续要用的多个值。
2. 为什么 AI 做不到这一点?
- AI 的训练语料大多是为了教学、维护、可读性而优化的代码。这些代码优先展示“正确性”和“设计模式”,而不是“熔炉深处的汇编和缓存行为”。因此,AI 天然地向 OOP 倾斜。写 DOD 风格代码需要程序员对硬件有具身认知,这是目前 AI 的盲区。
- 在真正的游戏引擎和渲染器(如虚幻引擎、Embree)中,你会看到大量裸数组、预计算步骤和手写 SIMD 优化。这些代码读起来也许不美,但它们跑起来能让 GPU 和 CPU 在各自最强的战场上释放战力。这也是你从“能跑”走向“能打”的必经之路。
🛠 总结:写出超越 AI 的 Elite 级系统代码,你必须死守这三条底线
从无限递归到浮点越界,从死锁到性能坍塌,AI 在 BVH 这个战场上把你坑了个遍。但你也因此彻底弄明白了,底层系统编程中,什么样的知识是 AI 永远无法从 GitHub 的干净代码里学来的:
| 核心底层领域 | 你必须掌握的防御性设计 | 为什么 AI 做不到 |
|---|---|---|
| 分治与递归安全 | 必须设定 max_depth 强行终止;必须检查划分后的 split_index 是否产生无效位移。 |
AI 只关注正向的递归公式,无法预测因输入几何数据畸变导致的逻辑坍塌。 |
| 离散数值边界 | 任何将浮点数([0,1])映射到整型数组下标的操作,必须使用 std::clamp 或 std::min 强行截断。 |
AI 缺乏对 IEEE 754 舍入误差的敏锐度,默认数学结果绝对精确。 |
| 现代 CPU 缓存优化 | 紧密循环内严禁对象构造与非必要函数调用;采用数据预处理的 DOD 模式。 | AI 倾向于 OOP 的整洁美感,无法评估指令级开销和缓存局部性。 |
带着这张表,你再回头看那个差点烧掉你 CPU 的 BVH 构建器,终于可以心平气和地跟小李说:“光追数据,明天发你。”
而你的 AI 数据工厂,也因为这些硬核的底层打磨,从一个“能用的工具”,真正变成了一座“工业级”的数字兵工厂。
故事还在继续,下一次,你的工厂又要接到什么离谱的需求呢?别忘了,跟 AI 合作写底层代码,就像带一个聪明绝顶但完全没有生活常识的天才实习生——你得替它兜住所有物理世界的底。
代码仓库入口:
- github源码地址(https://github.com/AIminminAI/Huhb3D-Viewer)。
- gitee源码地址(https://gitee.com/aiminminai/Huhb3D-Viewer)。
本文涉及:
- https://github.com/AIminminAI/Huhb3D-Viewer/blob/main/src/core/tool_registry.cpp
- https://github.com/AIminminAI/Huhb3D-Viewer/blob/main/src/agent/AIAgentController.cpp
- 如果想像唠嗑一样,去了解一些小知识,快去看看视频吧:
- 认准一个头像,保你不迷路:
- 抖音:搜索“GodWarrior”
- 快手:搜索“AIYWminmin”
- B站:搜索“宇宙第一AIYWM”
您要是也想站在文章开头的巨人的肩膀啦,可以动动您发财的小指头,然后把您的想要展现的名称和公开信息发我,这些信息会跟随每篇文章,屹立在文章的顶部哦
附录:
camera_poses.json
[
{
“frame_id”: 0,
“position”: [0.0, 0.0, 5.0],
“rotation_euler”: [0.0, 0.0, 0.0],
“fov_degrees”: 45.0,
“view_matrix”: [
[1.0, 0.0, 0.0, 0.0],
[0.0, 1.0, 0.0, 0.0],
[0.0, 0.0, 1.0, -5.0],
[0.0, 0.0, 0.0, 1.0]
],
“projection_matrix”: [
[2.414, 0.0, 0.0, 0.0],
[0.0, 2.414, 0.0, 0.0],
[0.0, 0.0, -1.002, -0.200],
[0.0, 0.0, -1.0, 0.0]
]
},
{
“frame_id”: 1,
“position”: [1.18, 0.0, 4.86],
“rotation_euler”: [0.0, -13.6, 0.0],
“fov_degrees”: 45.0,
“view_matrix”: [
[0.972, 0.0, 0.236, -0.0],
[0.0, 1.0, 0.0, 0.0],
[-0.236, 0.0, 0.972, -5.0],
[0.0, 0.0, 0.0, 1.0]
],
“projection_matrix”: [
[2.414, 0.0, 0.0, 0.0],
[0.0, 2.414, 0.0, 0.0],
[0.0, 0.0, -1.002, -0.200],
[0.0, 0.0, -1.0, 0.0]
]
}
]
label_legend.txt
Semantic Label Color Legend
Category -> (R, G, B) in 0-255 range
0 FreeSurface 127 127 127
1 HorizontalPlane 0 0 255
2 LateralPlane_X 0 255 0
3 LateralPlane_Z 255 0 0
4 NearHorizontal 255 255 0
5 NearLateral_X 255 0 255
6 NearLateral_Z 0 255 255
7 Degenerate 255 127 0
8 Reserved1 127 0 255
9 Reserved2 0 127 255
manifest.json
{
“version”: “2.0”,
“generator”: “Huhb3D-SyntheticDataPipeline”,
“rgb_count”: 100,
“mask_count”: 100,
“depth_count”: 0,
“has_legend”: true,
“has_ai_description”: false,
“has_camera_poses”: false
}

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐
 14
14 0
0- 0



 已为社区贡献38条内容
已为社区贡献38条内容

所有评论(0)