【MATLAB源码-第440期】基于MATLAB的室内UWB定位系统TOA与TDOA算法建模及噪声误差性能对比仿真
操作环境:
MATLAB 2024a
1、算法描述
摘要
室内定位是无线通信、物联网、智能仓储、机器人导航和人员资产管理中的重要基础技术。由于卫星定位信号在室内环境中容易受到建筑遮挡、多径传播和信号衰减影响,传统卫星导航方式难以稳定提供高精度位置结果。超宽带技术具有时间分辨率高、测距精度较高和抗多径能力相对较强等特点,因此在室内短距离高精度定位场景中具有较高研究价值。IEEE 802.15.4z-2020 标准也明确涉及增强型 UWB 物理层以及相关测距技术,这说明 UWB 测距与定位已经成为低功耗短距离无线网络中的重要技术方向。
本文围绕室内二维 UWB 定位系统展开建模与仿真研究,重点比较 TOA 定位算法与 TDOA 定位算法在随机目标点、观测噪声、非视距误差和不同基站数量条件下的定位性能。系统首先建立一个固定尺寸的室内平面区域,并在区域边缘与中部布设多个 UWB 基站。随后在区域内随机生成大量目标点,分别构造基于到达时间的测距观测量和基于到达时间差的测差观测量。在此基础上,TOA 算法采用线性化初值结合迭代修正的方式估计目标位置,TDOA 算法采用网格粗搜索结合阻尼迭代的方式求解目标坐标。仿真通过 RMSE、误差累计分布、NLOS 概率变化曲线、噪声强度变化曲线和基站数量变化曲线对两种算法进行对比。
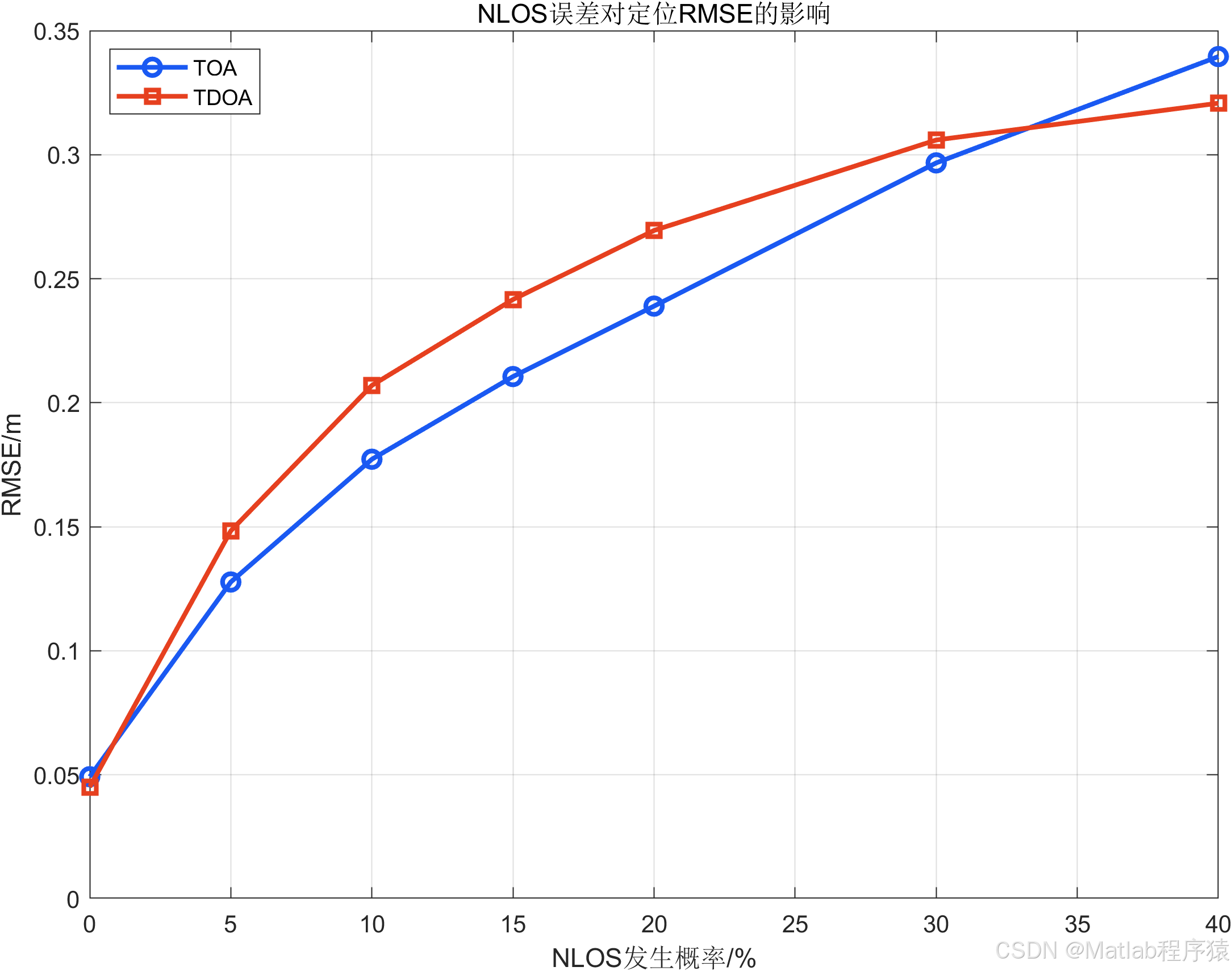
仿真结果表明,TOA 和 TDOA 均能够在二维室内区域内完成目标定位,但两者对观测噪声和 NLOS 偏置的敏感性存在差异。TOA 算法直接依赖绝对距离观测,结构直观,求解过程相对简单;TDOA 算法利用多个基站之间的距离差关系,能够降低对目标发射时刻的直接依赖,但对基站同步、参考基站选择和几何布局更敏感。随着观测噪声增强,两种算法的定位误差均会上升;随着 NLOS 发生概率增大,定位误差进一步扩大;随着基站数量增加,系统观测约束增强,定位结果通常会更稳定。本文仿真结果能够较直观地展示 UWB 室内定位中 TOA 与 TDOA 的基本差异,并为后续引入基站优化、NLOS识别、滤波融合和鲁棒估计等方法提供基础模型。
关键词: UWB室内定位;TOA;TDOA;非视距误差;RMSE;基站布设;定位误差分析
1 引言
室内定位技术的核心目标是在封闭或半封闭空间中估计人员、设备、机器人或移动终端的位置。与室外环境相比,室内环境中的无线传播条件更加复杂。墙体、货架、金属结构、人体遮挡和设备反射都会改变无线信号的传播路径。信号在室内传播时,接收端获得的往往不只是直接路径信号,还包括反射、绕射和散射形成的多径信号。对于基于时间测量的定位系统而言,这些传播现象会直接影响测距结果。尤其是在非视距传播条件下,信号通常绕过障碍物后到达接收端,实际传播路径长于直线距离,因此测距结果会产生正偏置。已有研究也指出,UWB室内定位虽然具有较高测距能力,但NLOS传播仍然会导致明显的定位误差,需要通过识别、补偿或鲁棒估计方法加以处理。
在常见无线室内定位技术中,Wi-Fi、蓝牙、RFID、视觉、惯性传感器和UWB均被广泛研究。Wi-Fi和蓝牙方案通常部署成本较低,但在高精度定位场景中容易受RSSI波动、多径和设备差异影响。视觉定位具有较强的环境感知能力,但对光照、遮挡、图像特征和计算资源有较高要求。惯性定位能够提供连续运动估计,但存在累计误差问题。相比之下,UWB技术通过极窄脉冲获得较高时间分辨率,能够支持TOA、TOF、TDOA、AOA等多种测量方式,用于估计移动节点的位置。公开文献也明确指出,UWB移动节点可以利用TOA、TOF、TDOA和AOA等测量量计算位置。
TOA和TDOA是UWB定位系统中最常见的时间类定位方法。TOA方法根据目标到多个基站的传播时间或距离测量值建立几何约束。若每个基站到目标点的距离已知,则目标位置可以看作多个圆的交点或最小误差交汇点。TDOA方法则不直接使用目标到每个基站的绝对距离,而是利用信号到达不同基站之间的时间差建立双曲线约束。在二维平面中,多组距离差约束可以交汇出目标位置。TDOA方法的优势在于不一定要求目标端与基站端严格同步,但基站之间通常需要较高同步精度。对于实际系统而言,TOA与TDOA各有工程代价,不能简单地说某一种方法在所有场景下更优。更客观的做法是结合噪声、NLOS、基站数量和基站几何布局进行仿真评估。
本文基于MATLAB建立室内二维UWB定位仿真系统,围绕TOA和TDOA两类算法展开对比。系统不是简单输出单次定位结果,而是从随机目标点、误差分布、噪声扫描、NLOS概率扫描和基站数量扫描等角度观察算法性能。这样的仿真方式更接近工程分析逻辑,因为实际定位系统的优劣不能只看某一个点的误差,而应观察大量样本下的统计结果。RMSE反映整体误差能量,CDF能够观察不同误差阈值下的累计概率,噪声曲线能够反映算法抗测量扰动能力,NLOS曲线能够反映算法对异常正偏置的敏感程度,基站数量曲线能够体现观测约束数量对定位稳定性的影响。
2 系统模型
本文建立的室内定位区域为二维矩形平面,区域尺寸设置为十二米乘九米。该尺寸能够模拟普通会议室、小型仓储空间、实验室或设备间中的局部定位场景。系统在区域边缘附近布置多个UWB基站,基站坐标固定且已知。目标点在室内区域中随机生成,并与边界保持一定距离,从而避免目标点过于靠近墙面导致几何关系过端。仿真中基准场景使用六个基站,扩展分析中进一步使用四到八个不同数量的基站组合,用于观察基站数量变化对定位精度的影响。
目标点位置是仿真的真实值。对于每一个目标点,系统先计算该目标点到每个基站的真实欧氏距离。随后在真实距离基础上加入随机测距噪声和NLOS正偏置。随机测距噪声用于描述时钟测量误差、接收检测误差和环境扰动带来的小幅随机波动。NLOS正偏置用于描述非视距传播导致的路径变长问题。这里采用正偏置建模是合理的,因为障碍物遮挡后,接收端捕获到的路径通常不是最短直达路径,而是经过反射或绕射后的较长路径。这个模型虽然不是完整信道级模型,但足以支撑TOA与TDOA算法在误差敏感性层面的对比。
TOA观测量直接由目标点到各基站的距离构成。仿真中每个基站都会获得一个带噪声的测距值,算法根据这些测距值反推目标位置。TDOA观测量以第一个基站作为参考,将其他基站到目标点的距离与参考基站到目标点的距离相减,形成一组距离差观测量。这样做可以模拟到达时间差定位中的参考基站关系。由于TDOA本质上使用相对时间差或相对距离差,因此它的几何约束不是圆,而是双曲线形式。多个双曲线约束共同确定目标位置。
系统输出包括TOA估计坐标、TDOA估计坐标、每个目标点的TOA误差、每个目标点的TDOA误差、RMSE和MAE等指标。其中RMSE用于衡量定位误差的总体水平,MAE用于反映平均误差大小。本文重点使用RMSE和CDF进行展示,因为RMSE对较大误差更敏感,能够体现NLOS和噪声导致的误差放大;CDF则可以直接展示定位误差在不同阈值下的累计概率,更便于判断算法在大多数样本上的表现。
3 TOA定位算法设计
TOA定位算法以目标到多个基站的距离测量值作为输入。每一个测距值都可以在二维平面中形成一个以基站为圆心、测距值为半径的圆。理想无噪声情况下,多个圆应当交于同一个目标点。但在实际噪声环境中,多个圆通常不会严格交于一点,因此需要采用最小二乘意义下的估计方法。本文代码中首先利用第一个基站作为参考,将多圆定位方程进行线性化,得到目标位置的初始估计。随后再利用迭代修正方式减小非线性残差,使估计坐标逐步逼近更合理的位置。
这种“线性初值加迭代修正”的方式具有两个实际优点。第一,线性初值计算速度快,可以避免迭代过程从完全随机位置开始。第二,后续迭代可以重新利用原始距离残差,使结果比单纯线性化求解更稳。代码中使用测距残差和雅可比矩阵构造更新方向,并加入微小正则项提升矩阵求解稳定性。正则项不是人为改变性能曲线,而是为了避免几何退化或数值病态情况下矩阵求解不稳定。对于室内定位仿真来说,这种处理是合理的。
TOA算法的优点是物理意义直观,仿真实现简洁。只要能够获得目标与多个基站之间的测距结果,就可以直接建立定位方程。TOA算法也便于理解噪声对定位结果的影响:测距值越准确,圆的交汇区域越集中;测距误差越大,圆的交汇区域越分散,最终位置估计误差也越大。TOA算法的不足在工程层面也很明确。若使用单向到达时间进行测距,目标端与基站端需要高精度时间同步;若使用双向测距方式,可以降低同步要求,但会增加通信交互次数和系统开销。因此TOA算法适合用作UWB定位建模中的基础方案,也适合作为TDOA、滤波融合和NLOS修正方法的对比基准。
4 TDOA定位算法设计
TDOA定位算法利用不同基站接收到同一目标信号的时间差来估计位置。与TOA不同,TDOA不直接要求得到目标到每个基站的绝对距离,而是关心目标到不同基站之间的距离差。二维平面中,一个固定距离差对应一条双曲线。目标位置应当位于多组双曲线约束的交汇附近。公开研究中,TDOA常用于实时定位系统,原因是它能够支持标签端相对简单、基站端统一处理的系统结构,但它对基站同步和部署几何更加敏感。相关研究也指出,UWB RTLS系统中的TDOA算法需要考虑基站部署、同步和定位稳定性等问题。
本文代码中的TDOA求解采用两阶段策略。第一阶段是网格粗搜索。程序在基站覆盖区域内生成一组候选点,并计算每个候选点对应的TDOA残差平方和。残差最小的候选点作为初始位置。第二阶段是阻尼迭代。程序根据当前估计点计算到各基站的距离差残差,并构造雅可比矩阵进行迭代更新。为避免TDOA非线性求解过程出现较大跳变,代码中对更新步长加入阻尼系数。这样做能够降低迭代发散风险,尤其是在初值不够理想或噪声较强时更有意义。
TDOA算法的性能与参考基站选择有关。本文中默认使用第一个基站作为参考基站,这种设置简洁清楚,便于展示算法原理。但从严格工程角度看,参考基站的位置、时钟质量、信号质量和NLOS状态都会影响TDOA结果。若参考基站本身受到NLOS影响,其他所有距离差观测量都会被参考误差牵连。因此,在实际系统中,TDOA通常需要结合基站选择、异常测量剔除、同步校准和鲁棒估计方法使用。本文没有把这些扩展内容强行写入代码,而是保留基础TDOA结构,便于清晰观察TOA和TDOA在相同环境参数下的差异。
5 仿真结果分析
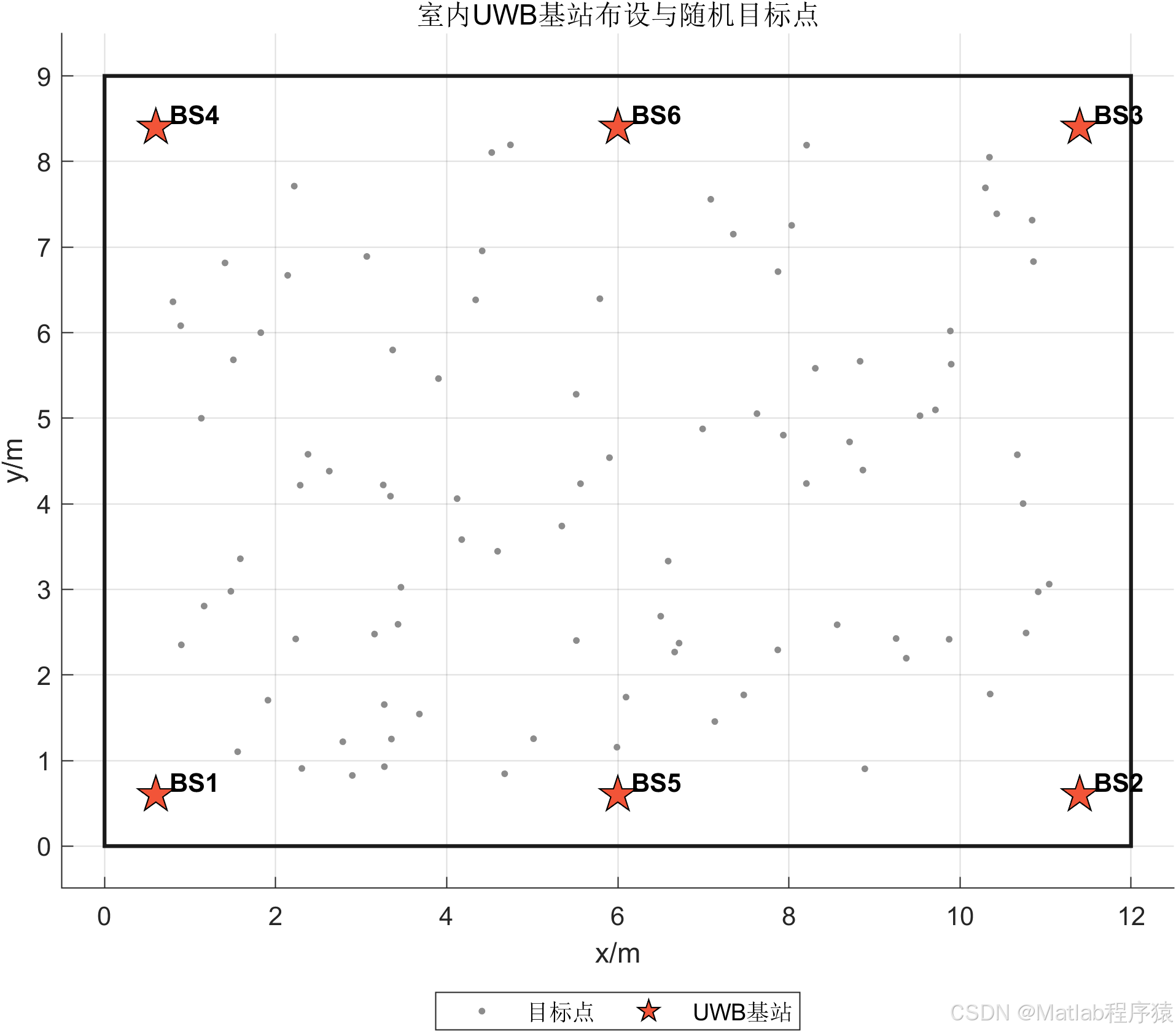
第一组图像展示室内UWB基站布设与随机目标点分布。基站主要布置在矩形区域的角点和边缘中部,这种布局能够在二维区域内形成较好的几何约束。目标点随机分布在室内区域内部,用于模拟移动标签在不同位置上的定位情况。该图的作用不是比较算法优劣,而是说明仿真场景的空间结构。定位算法的误差与基站几何分布密切相关,因此必须先明确基站与目标点的相对位置。如果基站全部集中在一侧,即使测距噪声较小,目标定位仍可能出现较大几何放大误差。
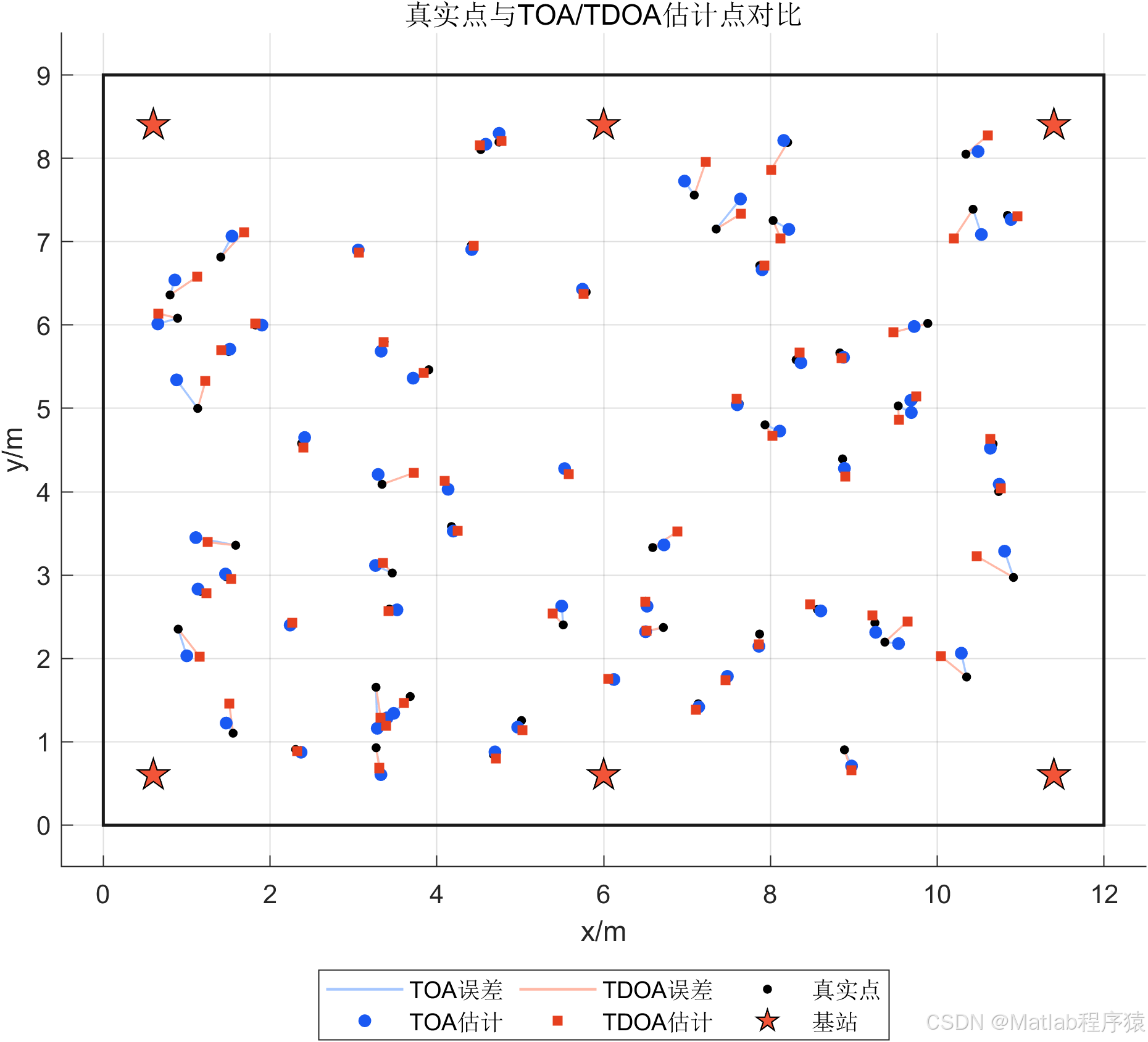
第二组图像展示真实点与TOA、TDOA估计点之间的关系。图中真实点、TOA估计点、TDOA估计点和误差连线可以直观看出定位偏差方向。相比只输出一个RMSE数值,这类空间图能够更清楚地观察误差是否具有明显方向性。如果某些区域误差明显更大,通常说明该区域的基站几何约束较弱,或者测距误差在该区域被放大。本文图像只选取部分样本点展示,是为了避免过多点位重叠导致图像不可读。这个处理是合理的,因为统计分析已经由后续CDF和RMSE曲线承担,空间图主要用于直观展示定位关系。
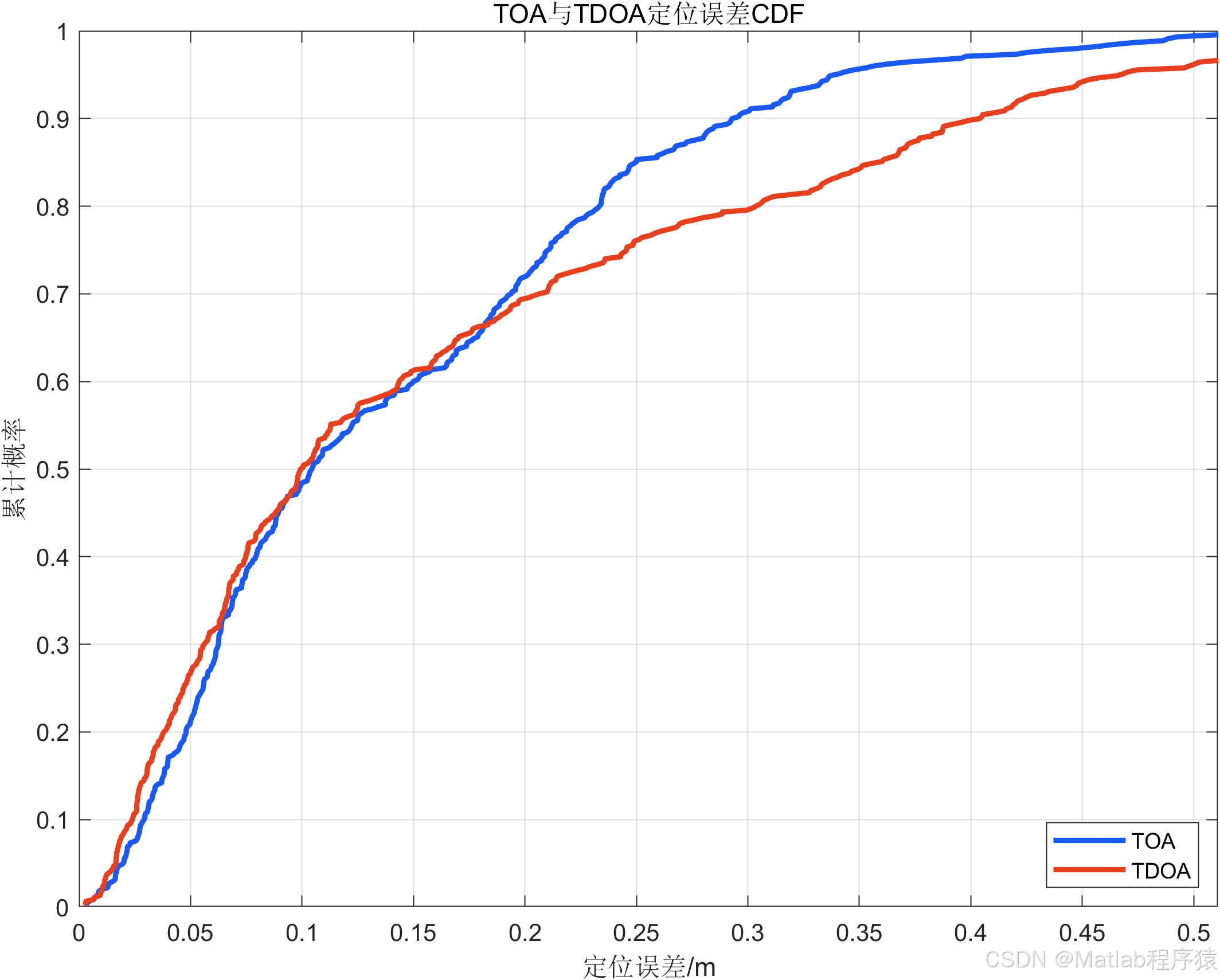
第三组图像为TOA与TDOA定位误差CDF曲线。CDF曲线能够回答一个更实际的问题:在给定误差阈值内,有多少比例的目标点能够满足定位精度要求。例如,当横轴定位误差小于某一数值时,纵轴累计概率越高,说明该算法在更多样本上实现了较小误差。与单一RMSE相比,CDF对工程判断更友好,因为不同应用对误差阈值的容忍度不同。智能仓储和人员粗定位可能允许几十厘米到一米级误差,而机器人精细导航和安全区域管控通常要求更高精度。通过CDF曲线,可以更全面地观察算法在不同精度要求下的表现。
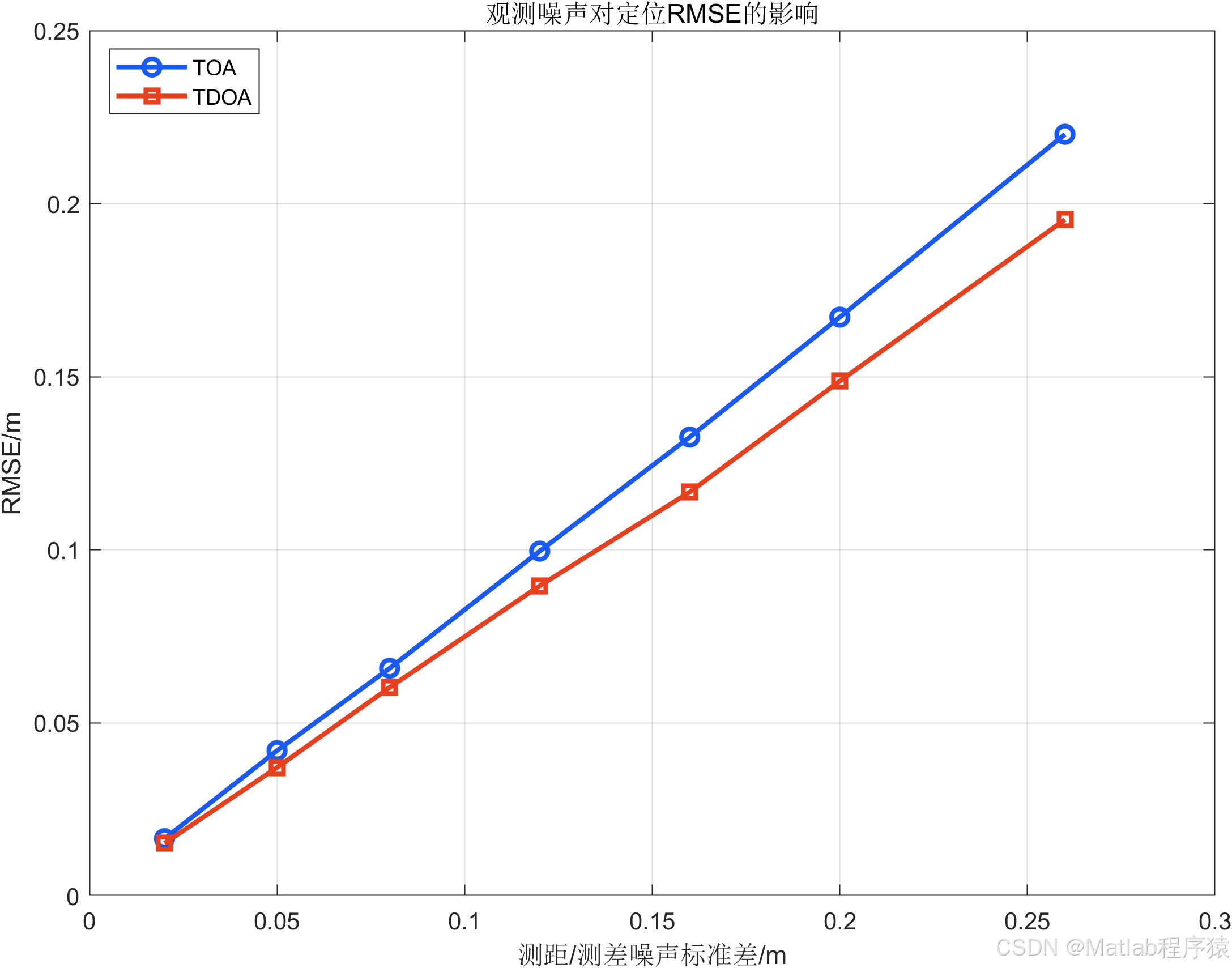
第四组图像分析观测噪声标准差对定位RMSE的影响。仿真中将NLOS概率置零,只改变随机测距噪声强度。结果一般会表现为噪声越大,定位RMSE越高。这一趋势符合定位系统的基本规律。TOA算法中的每个距离观测都会直接影响圆约束半径,TDOA算法中的距离差观测也会受到测量噪声扰动。若测距噪声较小,多个几何约束能够较集中地交汇;若测距噪声较大,约束之间的交汇区域变得分散,估计点偏离真实点的概率增加。这组实验能够说明测距精度是UWB定位性能的基础条件。
第五组图像分析NLOS发生概率对定位RMSE的影响。NLOS对UWB定位的影响比普通随机噪声更麻烦,因为它不是均值为零的小扰动,而往往表现为正向距离偏置。随机噪声可能在多次观测中部分抵消,但NLOS偏置会系统性拉大某些基站的测距值。随着NLOS发生概率提高,TOA和TDOA定位误差都会上升。尤其在TDOA中,如果参考基站或关键基站受到NLOS影响,距离差观测会出现明显偏移,进而影响双曲线约束位置。近年来很多研究都把NLOS识别与补偿作为UWB定位的重要方向,例如基于加权最小二乘、卡尔曼滤波、机器学习或聚类方法进行误差缓解。
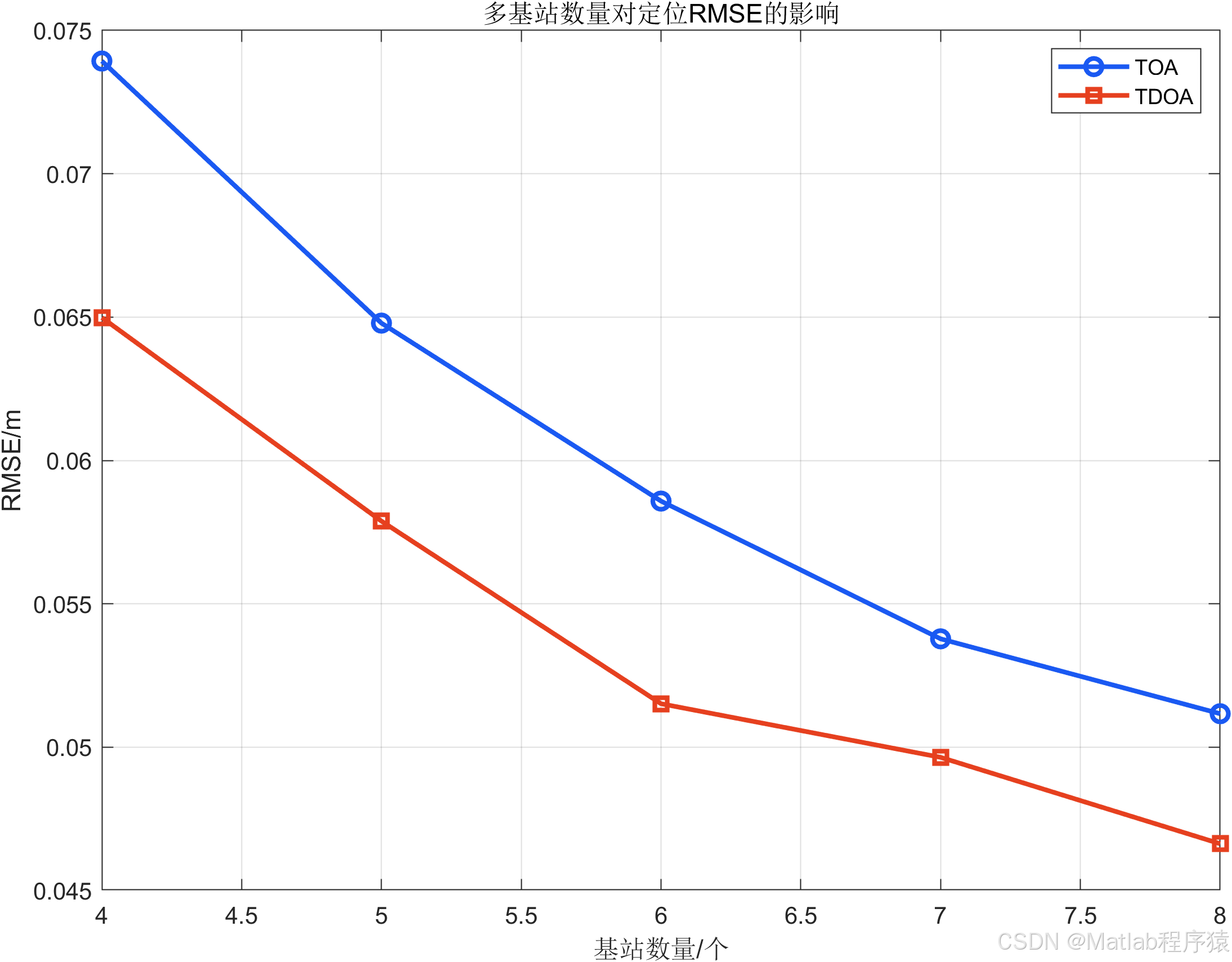
第六组图像分析基站数量对定位RMSE的影响。基站数量增加通常能够增强定位约束,提高系统鲁棒性。对于TOA定位而言,更多基站意味着更多圆约束,最小二乘估计能够利用冗余信息减小单个异常测距值的影响。对于TDOA定位而言,更多基站意味着更多距离差约束,可以改善双曲线交汇条件。不过,基站数量并不是越多越好。实际工程中还需要考虑基站成本、同步难度、安装位置、供电布线、遮挡环境和通信容量。本文仿真主要说明基站数量对算法误差趋势的影响,而不是给出固定工程部署数量。真正的工程部署还应结合现场尺寸、遮挡物分布和精度指标进行设计。
6 关键技术分析
本文代码体现了UWB室内定位仿真中的几个关键技术点。第一个关键点是基于几何约束的定位建模。TOA和TDOA本质上都属于几何定位方法。TOA通过多个距离圆进行位置估计,TDOA通过多个距离差双曲线进行位置估计。两者都依赖基站坐标已知这一前提。如果基站坐标本身存在安装误差,那么最终定位结果也会出现偏差。因此在实际系统中,基站标定和安装测量同样重要。公开研究也指出,UWB定位精度会受到基站安装位置影响,并可通过数学模型分析安装位置对定位误差的作用。
第二个关键点是噪声与NLOS建模。本文没有把信道模型复杂化,而是采用随机测距噪声和NLOS正偏置来构造测量误差。这种方式适合算法层面的对比仿真。随机噪声用于表示测距不确定性,NLOS正偏置用于表示遮挡导致的路径变长。虽然该模型不能完全替代真实UWB信道测量,但它能够抓住室内定位误差中的主要矛盾。对于教学、算法验证和工程前期评估而言,这种模型比完全理想化的无噪声模型更有意义。
第三个关键点是迭代求解的数值稳定性。TOA和TDOA都涉及非线性几何关系。直接求解析解并不总是稳定,尤其在观测噪声存在时,多个几何约束可能无法精确交汇。代码中TOA使用线性初值加迭代修正,TDOA使用网格粗搜索加阻尼迭代。这两种处理都不是单纯追求复杂度,而是为了提升求解可靠性。对于MATLAB仿真项目而言,这样的结构清楚、可读性强,也便于后续继续扩展算法。
第四个关键点是统计评价。单个目标点的定位误差具有偶然性,不能代表算法整体性能。本文使用大量随机目标点进行统计,并通过RMSE、CDF、噪声扫描、NLOS扫描和基站数量扫描进行多角度评价。这样的结果更有说服力。尤其是CDF曲线能够补充RMSE无法表达的信息。若两个算法RMSE接近,但一个算法在百分之九十样本中的误差更小,那么工程上可能更倾向选择该算法。定位系统评价不能只看单一指标,这是后续做类似项目时必须坚持的原则。
7 系统特点
本文系统具有较清晰的结构特点。首先,主函数与本地函数分离,主函数负责参数设置、仿真调用、图像绘制和结果输出,函数文件夹负责CDF计算、TOA求解、TDOA求解和定位过程模拟。这种结构便于阅读、调试和后续扩展。其次,系统使用固定随机种子,能够保证同一代码在相同环境下得到一致结果,便于复现实验图像。再次,系统输出六张具有实际分析意义的图像,分别覆盖场景布设、点位误差、误差累计分布、噪声影响、NLOS影响和基站数量影响,能够形成完整的仿真分析链条。
系统在算法层面同时包含TOA和TDOA两种典型方法,适合用于比较时间类定位算法的基本差异。TOA部分采用线性初值和高斯牛顿迭代,结构直观,便于理解距离约束定位过程。TDOA部分采用网格粗搜索和阻尼迭代,能够体现距离差定位的非线性求解特点。两种方法共享相同的目标点、基站布设和误差模型,因此对比关系较为公平。
系统在结果层面不仅展示算法定位精度,还进一步展示了误差来源对定位结果的影响。观测噪声实验能够体现测距精度的重要性,NLOS实验能够体现遮挡与非直达传播的影响,基站数量实验能够体现冗余观测和几何布局对定位性能的改善作用。这些内容比单纯画一张定位误差曲线更完整,也更适合用于课程学习、技术交流和算法演示。
8 结论
本文基于MATLAB建立了室内UWB二维定位仿真系统,并对TOA与TDOA两种定位算法进行了建模与性能比较。系统在固定室内区域内布置多个UWB基站,随机生成目标点,并引入测距噪声和NLOS正偏置构造更接近实际的观测环境。TOA算法通过距离观测进行定位,TDOA算法通过距离差观测进行定位,两者分别采用适合自身模型的迭代求解方式。仿真从空间点位、误差CDF、噪声敏感性、NLOS敏感性和基站数量影响等角度对算法表现进行了分析。
结果表明,TOA与TDOA均能够完成室内二维定位任务,但两者的误差表现受观测噪声、NLOS偏置和基站布局影响明显。TOA方法结构简单,定位约束直观,但对绝对测距质量要求较高。TDOA方法适合基于到达时间差的系统结构,但对参考基站、基站同步和几何布局更敏感。NLOS误差是影响UWB室内定位精度的重要因素,后续可在现有模型基础上进一步引入NLOS识别、异常测量剔除、加权最小二乘、扩展卡尔曼滤波和机器学习补偿方法。总体来看,本文仿真系统能够较完整地展示UWB室内定位中TOA与TDOA算法的基本原理和性能差异,具有较好的学习、演示和后续扩展价值。
参考文献
[1] IEEE Standards Association. “IEEE Standard for Low-Rate Wireless Networks--Amendment 1: Enhanced Ultra Wideband Physical Layers and Associated Ranging Techniques.” IEEE Std 802.15.4z-2020, 2020.
[2] Yao, Leehter, Lei Yao, and Yeong Wei Wu. “Analysis and Improvement of Indoor Positioning Accuracy for UWB Sensors.” Sensors, vol. 21, no. 17, 2021, article 5731.
[3] Barral, Verónica, et al. “NLOS Identification and Mitigation Using Low-Cost UWB Devices.” Sensors, vol. 19, no. 16, 2019, article 3464.
[4] Koyuncu, Hakan, and Shuang-Hua Yang. “Indoor Positioning and Wayfinding Systems: A Survey.” Human-Centric Computing and Information Sciences, vol. 10, 2020.
[5] Yu, Xianjia, Qingqing Li, Jorge Peña Queralta, Jukka Heikkonen, and Tomi Westerlund. “Applications of UWB Networks and Positioning to Autonomous Robots and Industrial Systems.” arXiv, 2021.
[6] Zhang, Fengyun, Li Yang, Yuhuan Liu, Yulong Ding, Shuang-Hua Yang, and Hao Li. “Design and Implementation of Real-Time Localization System Based on UWB and TDoA Algorithm.” arXiv, 2021.
[7] Xiong, Wenxin, Christian Schindelhauer, Hing Cheung So, Joan Bordoy, Andrea Gabbrielli, and Junli Liang. “TDOA-Based Localization with NLOS Mitigation via Robust Model Transformation and Neurodynamic Optimization.” arXiv, 2020.
[8] Duong, Phuong Bich, Ben Van Herbruggen, Arne Broering, Adnan Shahid, and Eli De Poorter. “Error Mitigation for TDoA UWB Indoor Localization Using Unsupervised Machine Learning.” arXiv, 2024.
[9] Fan, Ruixin, and Xin Du. “NLOS Error Mitigation Using Weighted Least Squares and Kalman Filter in UWB Positioning.” arXiv, 2022.
[10] Shalihan, Muhammad, Ran Liu, and Chau Yuen. “NLOS Ranging Mitigation with Neural Network Model for UWB Localization.” arXiv, 2022.
2、仿真结果演示
3、关键代码展示
略
4、MATLAB 源码获取
V
点击下方名片关注公众号获取

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐

 11
11 0
0- 0



 已为社区贡献24条内容
已为社区贡献24条内容

所有评论(0)