2026 智能汽车技术拐点:从堆参数到工程化,AI 重构整车底层逻辑
摘要:2026 年智能汽车行业已告别 “算力竞赛、配置堆砌”,进入AI 驱动、中央计算、端到端落地的深水区。本文聚焦中央电子电气架构、端到端大模型智驾、舱驾融合 AI、车云协同与安全合规五大技术赛道,结合量产实战与行业标准,解析车企如何从 “功能堆叠” 转向 “体系化竞争力”,为技术从业者、架构师与行业分析师提供可落地的研判框架。
搭配这个OpenClaw + Hermes 全栈技能包,就更是如虎添翼:ai-skills.ai
一、行业拐点:2026 不再比 “谁更强”,而比 “谁更稳、更省、更可用”
2026 年智能汽车赛道呈现三大技术共识:
- 分布式 ECU 时代终结:中央计算 + 区域控制成为标配,线束减少 40%,OTA 时间从小时级压缩到分钟级。
- 智驾路线收敛:端到端大模型 + 无图 + 车路云一体化,替代传统规则栈,城市 NOA 效率提升约 40%。
- AI 去魅:座舱从 “聊天炫技” 走向多模态闭环执行,语音 + 视觉 + 动作联动,真正服务驾驶安全。
行业已经用数据证明:决定智能汽车上限的,不是单颗芯片算力,而是全栈工程化能力。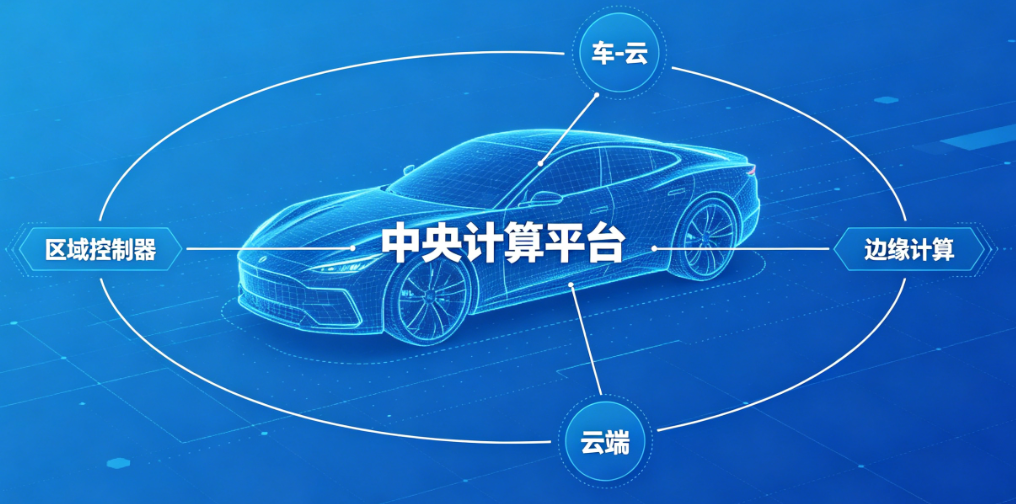
二、核心技术一:中央 E/E 架构 —— 整车的 “算力主板” 革命
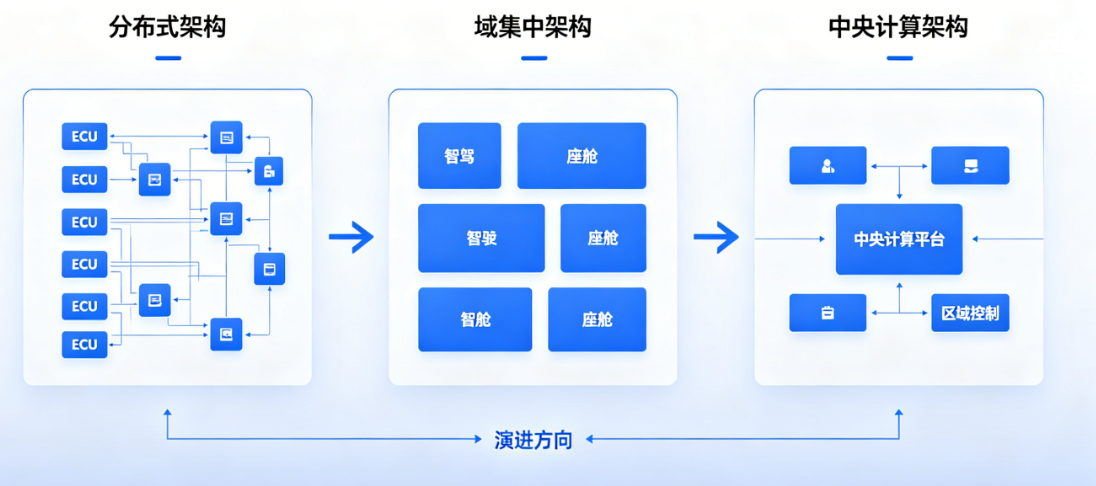
2.1 架构演进终局:分布式→域集中→中央计算
- 分布式:上百个 ECU,线束复杂、升级困难
- 域集中:智驾 / 座舱 / 动力 / 车身四大域独立
- 中央计算 + 区域控制:一台 HPC 统管整车,区域控制器只负责执行,硬件解耦、软件可迭代
2.2 量产核心价值
- 线束长度 & 重量大幅下降,能耗与成本双优化
- 跨域数据打通:智驾调用座舱摄像头做 DMS,座舱调用底盘数据做自适应体验
- OTA 更快、更稳:整车升级从 90 分钟缩至 15 分钟内
2.3 技术判断
2026-2027 是集中架构全面量产窗口期,未切换架构的品牌将在智能化迭代中掉队。
三、核心技术二:端到端大模型 —— 智驾进入 “类人决策” 时代
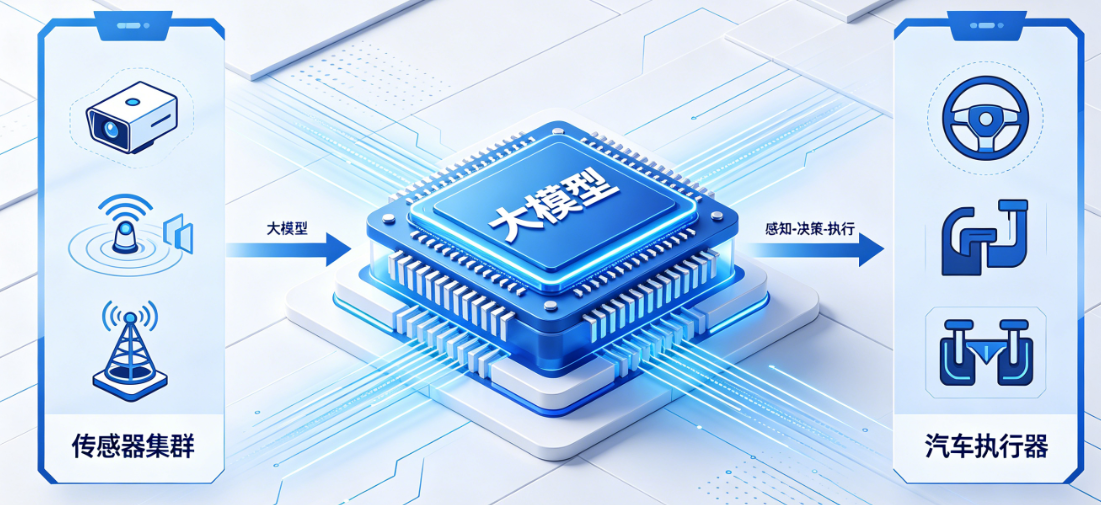
3.1 从 “规则编程” 到 “一模型通吃”
传统智驾:感知→融合→预测→规划→控制,分段开发,逻辑爆炸端到端大模型:传感器数据直连执行器,一链路输出方向盘、油门、刹车
3.2 2026 量产关键特征
- 多模态融合:相机 + 雷达 + 热成像 + V2X 信息统一输入
- 行为预判:识别行人 / 电动车姿态,预判加塞、鬼探头、无保护左转
- 无图 NOA 规模化:脱离高精地图依赖,城市泛化能力质变
3.3 行业真相
端到端不是万能,但它是高阶智驾的唯一可行路线。短板:可解释性、极端 case 鲁棒性、安全合规仍需 “工程铠甲”。
四、核心技术三:舱驾融合 AI—— 从 “两块屏” 到 “一张网”
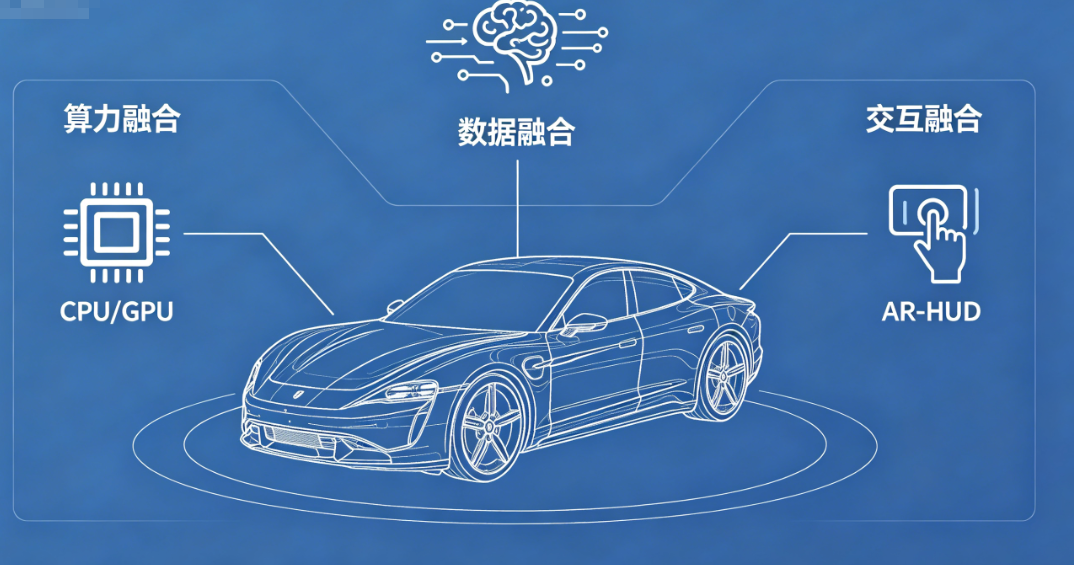
4.1 舱驾融合的真正含义
- 算力融合:一颗芯片跑座舱 + 智驾,降低成本、简化散热
- 数据融合:DMS/OMS 视线、疲劳状态直接进入智驾决策
- 交互融合:语音 + 手势 + AR-HUD + 驾驶策略联动,安全优先
4.2 2026 主流落地形态
- 多模态大模型上车:自然指令控制空调、车窗、导航、泊车、场景模式
- 驾驶员状态实时闭环:疲劳 / 分心→分级预警→主动降速→自动泊车
- 场景自动化:高速自动切入节能模式;到家自动规划车位、调节座椅
4.3 避坑点
舱驾融合不是功能堆砌,而是安全强关联,必须满足 ASIL-D 级功能安全。
五、核心技术四:车 - 云 - 边协同 —— 数据与 AI 的飞轮
5.1 车路云一体化实战价值
- 超视距感知:路口盲区、逆光、雨雾天感知距离扩展至 500 米
- 全局调度:拥堵预测、绿波通行、充电资源调度
- 模型闭环:车端数据回传→云端训练→增量 OTA 分发
5.2 车企必做三件事
- 建立车端数据脱敏与合规采集机制
- 构建小样本 / 自监督学习 pipeline,降低标注成本
- 车载模型轻量化、量化,保证 100ms 内低时延
六、核心技术五:安全与合规 —— 智能化的 “底线工程”

2026 年监管与市场共同收紧:
- 功能安全 ISO 26262:智驾、舱驾融合必须满足 ASIL 等级
- OTA 强监管:禁止 “带病 OTA”,必须充分验证再推送
- 数据合规:车端敏感数据本地处理、出境审批、日志留存
- 网络安全:车载总线、蓝牙、T-BOX 均需入侵检测
没有安全的智能化,等于上路风险。
七、2026 技术研判:四类玩家的胜负手
- 全栈自研派(华为、小鹏、理想等)胜点:中央计算 + 端到端 + 舱驾融合一体化,迭代速度碾压
- 平台供应商派(英伟达、高通、博世)胜点:芯片 + 工具链 + 中间件,降低车企准入门槛
- 传统车企转型派胜点:制造、底盘、品控 + 快速拥抱中央架构
- 软件定义新玩家胜点:AI 模型、数据闭环、云端协同,建立差异化体验
八、总结:2026 智能汽车的终极公式
智能汽车 = 中央计算平台 + 端到端智驾模型 + 舱驾融合 AI + 车云协同闭环 + 安全合规底座
过去比参数,现在比工程;过去堆功能,现在比体验;过去拼单点,现在拼全栈。
2026 年,能活下去并长大的玩家,只属于一类:把 AI 真正变成汽车的一部分,而不是挂在车上的玩具。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐

 0
0 0
0- 0



 已为社区贡献11条内容
已为社区贡献11条内容

所有评论(0)