【优化交叉口的绿灯时间】基于遗传算法的交通灯管理研究(Matlab代码实现)
💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
🎁完整资源、论文复现、期刊合作、论文辅导及科研仿真定制事宜点击:
👉👉👉本文完整资源下载
💥1 概述
随着城市化进程加速,交通拥堵成为全球性问题。交叉口作为交通网络的瓶颈节点,其信号灯配时优化至关重要。传统固定配时方案难以适应动态交通需求,而遗传算法(Genetic Algorithm, GA)因其全局搜索能力和多目标优化特性,成为交通信号优化的核心工具。研究目标是通过GA动态调整绿灯时间,实现以下多目标优化:
- 减少平均延误(如韦伯斯特延误模型);
- 提高通行能力(如最大化单位周期内的车辆通过量);
- 降低环境影响(如减少CO₂和燃料消耗);
- 平衡多相位需求(如避免某相位绿灯时间过长导致其他方向拥堵)。
1. 交叉口绿灯时间优化的基本原理
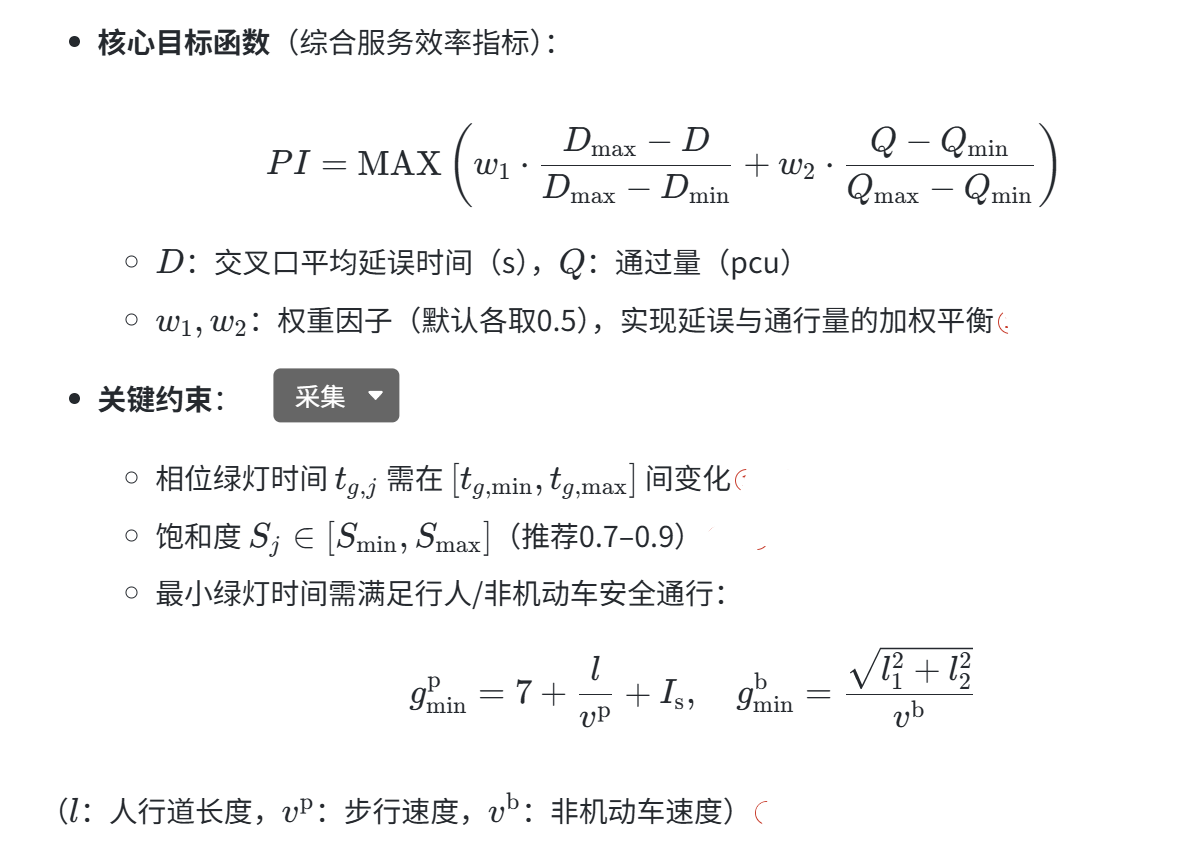
1.1 优化目标与约束条件
绿灯时间优化需平衡延误最小化与通行量最大化的双重目标,同时满足交通安全与效率约束:
1.2 优化流程
采用离散搜索策略:
- 以交叉口为单位,按1秒步长调整各相位绿灯时间
- 计算所有可行方案的 D 和 Q
- 选择使 PIPI 值最大的绿灯时间组合
流程如图1所示: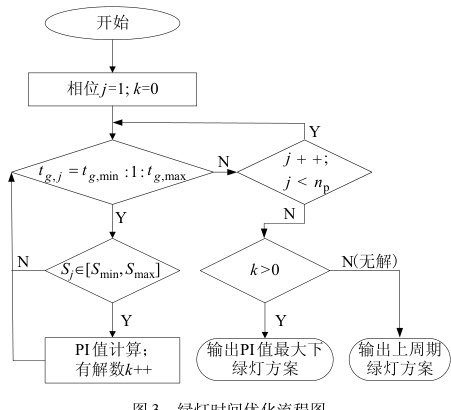
图1:绿灯时间优化流程(章如峰等, 2014)
2. 遗传算法的实现框架
2.1 算法优势与适用性
- 全局搜索能力:避免传统方法陷入局部最优,适用于非线性、多约束的配时问题
- 多目标协同:可同时优化延误、通行量、排队长度等指标
- 实时适应性:通过动态调整参数应对交通流变化
2.2 核心操作步骤
| 步骤 | 实现方法 | 创新改进 |
|---|---|---|
| 编码 | 整数编码表示各相位绿灯时间(例:25,30,2025,30,20 | |
| 表示三个相位的时长) | — | |
| 初始化种群 | 随机生成 NN 组绿灯时间组合,满足 tg,min≤t≤tg,maxtg,min≤t≤tg,max | 引入饱和约束:剔除 Sj∉[0.7,0.9]Sj∈/[0.7,0.9] 的个体 |
| 适应度评估 | 以目标函数 PIPI 或延误 dd 作为适应度(PIPI 越大越好,dd 越小越好) | 归一化处理:Fitness=11+dFitness=1+d1 |
| 选择 | 轮盘赌选择 + 精英保留策略 | 希尔排序竞争法:加速高适应度个体筛选 |
| 交叉 | 单点交叉(随机选择切点交换基因片段) | 邻接矩阵深度优先遍历:避免断路问题(多交叉口场景) |
| 变异 | 非均匀变异:以概率 pmpm 微调绿灯时间 | 动态调整变异率:ω=ωmax−ωmax−ωminTtω=ωmax−Tωmax−ωmint |
2.3 参数设置关键经验
| 参数 | 推荐值 | 影响机制 |
|---|---|---|
| 种群规模 (nPopnPop) | 400–500 | 过小易局部最优,过大数据冗余 |
| 迭代次数 (MaxItMaxIt) | 25–3000 | 依问题复杂度调整(单交叉口25代,多交叉口需>1000代) |
| 交叉概率 (pcpc) | 0.5–0.8 | 高概率加速搜索但破坏精英个体 |
| 变异概率 (pmpm) | 0.02–0.1 | 过低降低多样性,过高偏离最优解 |
| 精英保留比例 | 0.05–0.2 | 防止优秀基因丢失 |
3. 算法优化关键技术
3.1 多目标协同优化改进
- 动态权重调整:根据交通状态自适应调整 w1,w2w1,w2(高峰侧重通行量,平峰侧重延误)
- Pareto最优解筛选:通过子种群分工优化不同目标(延误、通行量、排放),再协同整合
3.2 多交叉口协同优化
- 相位差同步:优化相邻路口绿灯启动偏移量,减少车队停车次数

图2:相邻路口相位差示意图(刘脐钟等, 2014) - 区域控制模型:统一周期时长 Ci=Cj,以子区为单位优化
3.3 自适应改进策略
-
退火选择机制:结合模拟退火算法,以概率接受次优解避免早熟
-
动态参数调整:

随迭代次数降低变异率,提高收敛稳定性
4. 数据采集与效果验证
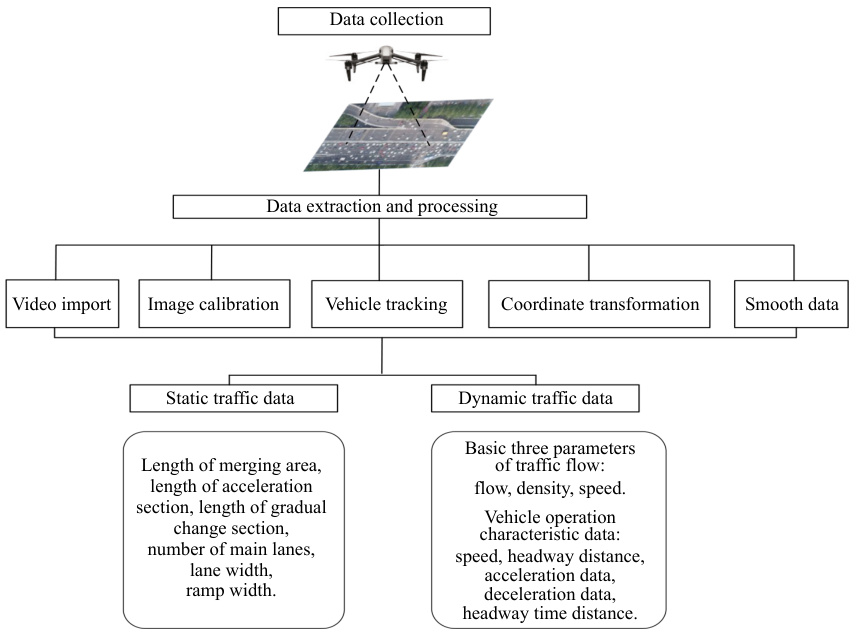
4.1 交通数据获取方法
| 数据源 | 技术 | 应用场景 |
|---|---|---|
| 微波雷达/视频摄像头 | 实时车流量检测 | 延误与通行量计算 |
| GPS/手机信令 | 车辆轨迹分析 | 行程时间统计 |
| 无人机航拍 | 图像校准+车辆跟踪 | 合并区动态参数提取 |
| 卡尔曼滤波 | 数据降噪与背景更新 | 高流量下的稳定监测 |
4.2 实验效果对比
| 场景 | 优化指标 | 遗传算法效果 | 传统方法 |
|---|---|---|---|
| 单交叉口(饱和) | 平均延误 | ↓18.7% (8.4 s) | — |
| 排队长度 | ↓14.1% (1.8 pcu) | — | |
| 单交叉口(改进Webster) | 延误 | ↓15.64% | Webster模型↓9.2% |
| 多交叉口(2×2路网) | 车辆平均行程时间 | ↓12.3% | 定时控制↓4.1% |
5. 挑战与未来方向
- 实时性瓶颈:
- 大规模路网优化需分钟级计算,需结合强化学习降低延迟
- 参数敏感性问题:
- 开发自整定GA参数模块(如贝叶斯优化)
- 多模态交通集成:
- 增加行人/非机动车延误目标权重
- 硬件部署:
- 嵌入式系统移植(如FPGA加速计算)
结论:基于遗传算法的绿灯时间优化通过多目标协同搜索与自适应改进,显著提升交叉口效率(饱和状态下延误降低>15%)。未来需结合实时数据融合与硬件加速,推动从单点到区域协同控制的升级。
📚2 运行结果



部分代码:
%% Problem Formulation
FitnessFunction=@(C,g,x,c) TDi(C,g,x,c); % FitnessFunction
nLights=4; % Number of Traffic Lights
nIntersections=1; % Number of Intersections (static as 1 intersection)
VarSize=[1 nIntersections*nLights]; % Decision Chromosome genes based on number of Intersections
greenMin= 10; % Lower bound of GREEN LIGHT
greenMax= 60; % Upper bound of GREEN LIGHT
Cyclemin=60; % Lower bound of CYCLE
Cyclemax=180 ;
RoadcapacityNSWE=[20,20,20,20]; % Road Capacity for NSWE respectivelly
CarsNSWE=[20,20,11,17];
RoadCongestion1NSWE=RoadcapacityNSWE-CarsNSWE; % congestion according to free road spaces
RoadCongestionNSWE=RoadCongestion1NSWE./RoadcapacityNSWE; % Volume/Capacity RATIO
carpass=5;
%% Genetic Algorithm Parameters
MaxIt=25; % Maximum Number of Iterations
nPop=400; % Population Size
pc=0.5; % Crossover Percentage
nc=2*round(pc*nPop/2); % Number of Offsprings (parents)
pm=0.02; % Mutation Percentage
nm=round(pm*nPop); % Number of Mutants
mu=0.1; % Mutation Rate
pinv=0.2;
ninv=round(pinv*nPop);
beta=8; % Selection Pressure
%% Initialization
% Individual Structure
empty_individual.GreenNSWE=[];
empty_individual.TotalDelay=[];
% Population Structure
pop=repmat(empty_individual,nPop,1);
% Initialize Population
i=1;
current_cycle=160-12; %estw kiklos 160 seconds - 12 seconds gia kitrino
while i<=nPop
% Initialize Individual
pop(i).GreenNSWE=randi([greenMin greenMax],VarSize);
% Cycle time rules
% if(sum(CarsNSWE)<10)
% current_cycle(i)=randi([Cyclemin 80]);
% elseif(sum(CarsNSWE)<15)
% current_cycle(i)=randi([80 100]);
% elseif(sum(CarsNSWE)<20)
% current_cycle(i)=randi([100 120]);
% elseif(sum(CarsNSWE)<25)
% current_cycle(i)=randi([120 140]);
% elseif(sum(CarsNSWE)<30)
% current_cycle(i)=randi([140 160]);
% else
% current_cycle=180;
% end
% current_cycle=current_cycle(:);
if(sum(pop(i).GreenNSWE)>current_cycle)
continue;
end
% Individual Evaluation from Fitness Function
for j=1:nLights
% Measure Delay for each traffic light with current congestion
pop(i).TotalDelay(j)=FitnessFunction(current_cycle,pop(i).GreenNSWE(j),RoadCongestionNSWE(j),RoadcapacityNSWE(j));
end
% Summation of Total Delays quotients
pop(i).TotalDelay= real(sum(pop(i).TotalDelay));
i=i+1;
end
% Sort Population
TotalDelay=[pop.TotalDelay];
[TotalDelay, SortOrder]=sort(TotalDelay);
pop=pop(SortOrder);
% Store Best Solution
BestSol=pop(1);
% Store Best Fitness
BestDelay=pop(1).TotalDelay;
% Worst Fitness
WorstDelay=pop(end).TotalDelay;
disp(['FIRST Population..........Best TotalDelay = ' num2str(BestDelay)]);
fprintf('\n')
disp('Green Timings in seconds:');
disp([' North Green time = ' num2str(BestSol.GreenNSWE(1))]);
fprintf('\n')
disp([' South Green time = ' num2str(BestSol.GreenNSWE(2))]);
fprintf('\n')
disp([' West Green time = ' num2str(BestSol.GreenNSWE(3))]);
fprintf('\n')
disp([' East Green time = ' num2str(BestSol.GreenNSWE(4))]);
fprintf('\n')
%% Loop For Number of Iterations
count=0;
for it=1:MaxIt
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。
[1]王曈,刘洋.5G智能交通背景下交通信号灯配时优化研究——基于灰色预测模型和遗传算法[J].智能计算机与应用, 2020, 000(007):P.185-191.
[2]薛靖.基于预信号的交叉口公交信号优先控制方法研究[J].[2023-12-17].
[3]马浩钦.基于遗传算法的智能交通灯控制研究[J].电子制作, 2019(24):3.DOI:CNKI:SUN:DZZZ.0.2019-24-012.
🌈4 Matlab代码实现
🎁完整资源、论文复现、期刊合作、论文辅导及科研仿真定制事宜点击:
👉👉👉本文完整资源下载

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐
 0
0 0
0- 0



 已为社区贡献366条内容
已为社区贡献366条内容

所有评论(0)