[具身智能-714]:RViz2 (ROS Visualization) 和 RQt 区别
·
RViz2 (ROS Visualization) 和 RQt 是 ROS2 中两个核心可视化工具,定位完全不同:RViz2 专注 3D 空间可视化,RQt 是通用调试监控工具箱。 两者常配合使用,但设计目标、功能与架构差异很大。
一、核心定位与本质区别
-
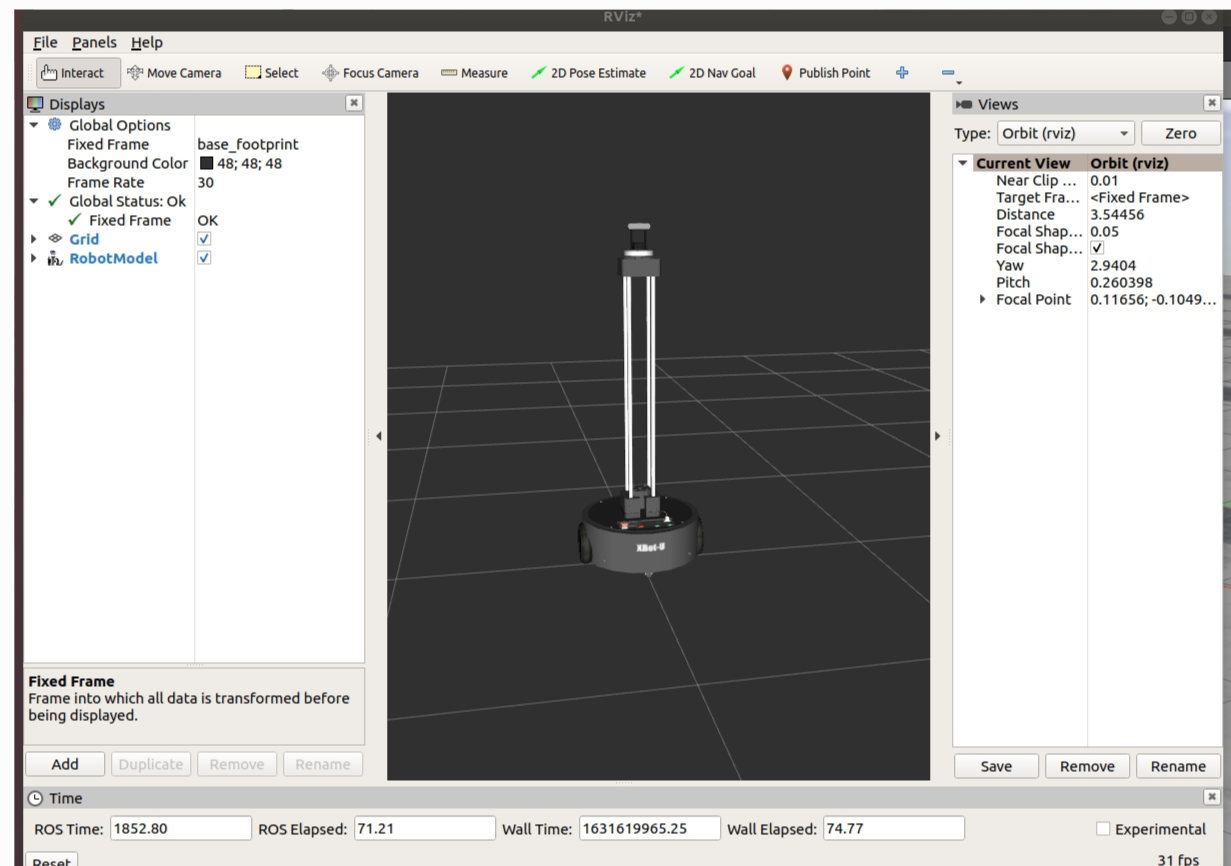
RViz2:专用 3D 可视化引擎
- 本质:ROS2 节点 + 3D 渲染引擎 (Ogre3D/OpenGL)
- 定位:机器人的 **“眼睛”,看物理空间、传感器、运动、地图 **
- 一句话:在 3D 世界里看机器人
RQt:通用 Qt GUI 插件框架
- 本质:Qt 应用 + 插件化工具集
- 定位:机器人的 **“监控面板 / 调试器”,看系统内部、数据、逻辑 **
- 一句话:用图形界面,替代命令行,调试 ROS2 系统
二、详细对比(核心维度)
1. 功能与显示内容
RViz2 (3D 空间可视化)
- 机器人 URDF/SDF 模型
- 激光雷达 (scan)、点云、深度图
- 相机图像、TF 坐标变换
- 栅格地图 / 导航路径 / 规划轨迹
- 3D 标记、交互目标点 (2D Goal)
RQt (系统调试监控)
- rqt_graph:节点 - 话题 - 服务拓扑图
- rqt_plot:数值数据实时曲线
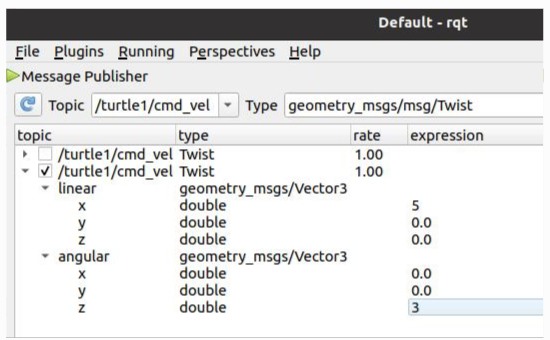
- rqt_topic:话题消息内容监视器
- rqt_service/action:服务 / 动作调用器
- rqt_console:日志 / 警告 / 错误查看
- rqt_param:参数服务器编辑
- rqt_image_view:简单 2D 图像显示

2. 架构与技术
RViz2
- 语言:C++ 为主
- 渲染:Ogre3D/OpenGL 3D 引擎
- 插件:Display 插件(专用于 3D 物体渲染)
- 节点身份:标准 ROS2 节点(/rviz2)
- 资源:较重(3D 渲染、显存占用高)
RQtROS
- 语言:Python/C++ 双支持
- 渲染:Qt Widget(2D 界面)
- 插件:通用 Qt 插件(任意 GUI 功能)
- 节点身份:非标准节点(部分插件含节点)
- 资源:极轻量(单插件内存≈RViz2 的 1/5)
3. 交互能力
RViz2
- 3D 视角操控(旋转 / 平移 / 缩放)
- 2D 导航目标、初始位姿估计
- 3D 点拾取、距离测量
- 配置保存 / 加载(.rviz)
- 交互:偏 “观察 + 少量控制”
RQt
- 消息发布 / 服务调用 / 参数修改
- 数据筛选、日志过滤、图表缩放
- 布局自由拖拽、多窗口停靠
- 配置保存(.perspective)
- 交互:强 “调试 + 主动控制”
4. 适用场景
RViz2
- 感知算法验证(激光 / 视觉 / SLAM)
- 运动控制 / 导航效果演示
- 机器人模型 / TF 坐标系调试
- 系统演示、用户展示
RQt
- 系统启动 / 节点通信排查
- 实时数据趋势分析(rqt_plot)
- 参数在线调参、消息内容检查
- 轻量级监控(嵌入式板卡首选)
三、一张表看懂异同
表格
| 特性 | RViz2 | RQt |
|---|---|---|
| 核心定位 | 3D 空间可视化 | 系统调试监控 |
| 渲染引擎 | Ogre3D (3D) | Qt (2D 界面) |
| 主要数据 | 点云、地图、机器人、TF | 节点图、曲线、日志、消息 |
| 资源占用 | 高(3D 渲染) | 低(轻量级插件) |
| 插件类型 | 3D 显示插件 | 通用 GUI 工具插件 |
| 节点属性 | 标准 ROS2 节点 | 框架非节点,插件可选 |
| 最佳用途 | 看机器人 “长什么样、在哪、看到啥” | 看系统 “跑没跑、通不通、数据对不对” |
| 启动命令 | ros2 run rviz2 rviz2 |
rqt |
四、总结:何时用哪个?
- 用 RViz2 当你需要:
- 看3D 空间、机器人模型、传感器物理数据
- 验证导航、SLAM、运动规划效果
- 做直观演示
- 用 RQt 当你需要:
- 查节点 / 话题 / 服务是否连通
- 看数据曲线、日志、参数
- 在嵌入式 / 低性能设备上轻量调试
最佳实践:两者同时开!
- RQt 查系统状态、调参数
- RViz2 看 3D 效果、验证算法
- 组合 = 完整 ROS2 调试可视化方案

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐

 9
9 0
0- 0



 已为社区贡献128条内容
已为社区贡献128条内容

所有评论(0)