点云编解码深度分析:V-PCC vs G-PCC性能对比与AI编码突破方向
摘要**:点云作为一种能够真实表达三维空间的数据格式,在沉浸式通信、自动驾驶、数字孪生等领域发挥着日益重要的作用。然而,点云数据海量级的特点为存储与传输带来了严峻挑战。本文深入分析了MPEG标准化组织提出的两大点云压缩框架——基于视频的V-PCC(ISO/IEC 23090-5)和基于几何的G-PCC(ISO/IEC 23090-9),从技术原理、编码工具、性能表现等维度进行系统性对比。在此基础上,本文进一步探讨了AI赋能点云编码的最新进展,包括OctAttention、PCGC、DeepPCC等代表性方法,分析其在压缩效率与计算复杂度之间的权衡。最后,结合6G XR场景的技术需求,本文提出了从传统编解码向AI编码演进的路线图,为未来沉浸式媒体系统设计提供参考。
关键词:点云压缩、V-PCC、G-PCC、AI编码、6G、沉浸式通信、自动驾驶
目录
一、点云编解码技术背景
1.1 点云数据模型与特征
点云(Point Cloud)是由空间中大量离散点组成的数据结构,每个点包含几何坐标(x, y, z)和属性信息(如RGB颜色、法向量、反射强度等)。与传统的2D图像或3D网格相比,点云具有以下显著特征:
| 特征维度 | 点云特性 | 传统图像/视频 | 影响分析 |
|---|---|---|---|
| 空间结构 | 非结构化、稀疏分布 | 结构化规则网格 | 无法直接利用帧内相邻像素预测 |
| 几何精度 | 可达亚毫米级(10-bit~18-bit深度) | 像素级 | 数据量随精度呈指数增长 |
| 时间维度 | 动态点云含时序相关性 | 天然时序 | 可利用帧间预测提升压缩效率 |
| 属性维度 | 多属性(颜色+几何+反射率) | RGB三通道 | 属性编码与几何编码需协同优化 |
数据量估算公式:
对于一个包含 N N N 个点、属性为RGB(各8-bit)的动态点云序列,假设帧率为 F f p s F_{fps} Ffps:
比特率 r a w = N × ( 3 × 8 + 3 × 32 ) × F f p s [ bps ] \text{比特率}_{raw} = N \times (3 \times 8 + 3 \times 32) \times F_{fps} \quad [\text{bps}] 比特率raw=N×(3×8+3×32)×Ffps[bps]
其中 3 × 8 3 \times 8 3×8 为RGB属性位深, 3 × 32 3 \times 32 3×32 为浮点几何坐标位深(实际可用16-bit量化)。
示例计算:1百万点、30fps、RGB+XYZ的点云:
- 原始比特率 = 10 6 × 24 × 30 = 720 Mbps 10^6 \times 24 \times 30 = 720 \text{ Mbps} 106×24×30=720 Mbps
- 若以1Gbps传输,需压缩至1/1000以下
1.2 编解码挑战
1.2.1 数据规模挑战
根据MPEG PCC测试数据集(如8iVFB、MVUB)的统计:
- 密集动态点云:约1M2M点/帧,30fps下原始数据率达720Mbps1.44Gbps
- 稀疏LiDAR点云:约100K500K点/帧,但几何精度要求高(10-bit16-bit深度)
1.2.2 实时性约束
| 应用场景 | 端到端延迟要求 | 技术挑战 |
|---|---|---|
| 全息通信 | <10ms | 编码+传输+解码需全链路低延迟 |
| 远程手术 | <1ms | 亚毫米级几何精度不可妥协 |
| 自动驾驶 | <100ms | 实时环境感知与决策 |
| 沉浸式游戏 | <20ms | 头部运动到画面更新的延迟 |
1.2.3 质量评估难题
点云质量评估远比传统视频复杂,主要指标包括:
- 几何失真:点到点距离(Hausdorff距离)、点到平面距离
- 属性失真:PSNR-YUV、MS-SSIM等图像质量指标适配
- 主观质量:需考虑3D感知特性,如遮挡、视点依赖性
1.3 标准化历程
1.3.1 MPEG PCC标准化进程
时间线:
2014 MPEG启动PCC需求分析
2017 发布V-PCC CfP和G-PCC CfP
2019 V-PCC进入委员会草案阶段
2020 V-PCC (ISO/IEC 23090-5) 正式发布
G-PCC (ISO/IEC 23090-9) 正式发布
2022 G-PCC 2nd Edition工作启动
2024 AI-based PCC CfP发布与评审
2024 Enhanced G-PCC标准化(新增Part)
2026 预计AI-based PCC FDIS完成
1.3.2 V3C标准体系
V-PCC的技术基础是**视觉体积视频编码(V3C, Visual Volumetric Video-based Coding)**框架:
| 组件 | 说明 |
|---|---|
| V3C_VPS | V3C参数集,描述整体码流结构 |
| V3C_AD | Atlas数据,图集分割与打包信息 |
| V3C_OVD | 占用视频数据,标识投影区域 |
| V3C_GVD | 几何视频数据,点云深度信息 |
| V3C_AVD | 属性视频数据,纹理颜色信息 |
二、V-PCC技术原理深度解析
2.1 核心思想:3D→2D投影+视频编码
V-PCC(Video-based Point Cloud Compression)的核心创新在于将三维点云投影到二维图像空间,从而复用成熟的视频编码标准(如HEVC/H.265、VVC/H.266)。
技术路线图:
输入3D点云
↓
几何投影 → 生成2D几何图(Geometry Map)
属性投影 → 生成2D属性图(Attribute Map)
占用分析 → 生成占用图(Occupancy Map)
↓
三个独立视频流 + Atlas元数据
↓
HEVC/VVC编码 → 复用视频容器封装
2.2 分片(Segmentation)与投影(Projection)算法
2.2.1 投影平面选择
V-PCC对每个点确定最优投影方向,基于以下原则:
- 最小遮挡:选择使该点被其他点遮挡概率最小的平面
- 面积最小:投影后覆盖面积最小化,减少无效像素
- 深度一致性:同一切片内点深度差异最小
投影平面集合(6个方向): + X +X +X, − X -X −X, + Y +Y +Y, − Y -Y −Y, + Z +Z +Z, − Z -Z −Z
2.2.2 分片生成算法
# V-PCC分片生成伪代码
def generate_patches(point_cloud, max_patch_size=32):
"""
将点云分割为多个投影分片
"""
patches = []
occupied_cells = set() # 避免重叠
for point in point_cloud:
if point.cell in occupied_cells:
continue
# 确定6个方向的投影质量
best_plane = argmax(projection_quality(point, all_planes))
# 生长分片
patch = grow_patch(point, best_plane, max_patch_size)
patches.append(patch)
occupied_cells.update(patch.cells)
return patches
2.3 补丁打包(Patch Packing)优化
2.3.1 Atlas尺寸确定
Atlas尺寸由以下参数决定:
Atlas_Width = ⌈ BoundingBox_Width Grid_Size ⌉ , Atlas_Height = ⌈ BoundingBox_Height Grid_Size ⌉ \text{Atlas\_Width} = \lceil \frac{\text{BoundingBox\_Width}}{\text{Grid\_Size}} \rceil, \quad \text{Atlas\_Height} = \lceil \frac{\text{BoundingBox\_Height}}{\text{Grid\_Size}} \rceil Atlas_Width=⌈Grid_SizeBoundingBox_Width⌉,Atlas_Height=⌈Grid_SizeBoundingBox_Height⌉
典型配置:Grid_Size = 16/32像素,Atlas分辨率可达4096×4096。
2.4 几何/属性图像生成与编码
2.4.1 几何图像生成
# 几何图像生成
def generate_geometry_map(patches, atlas_size, grid_size):
geometry_map = np.full(atlas_size, fill_value=MAX_DEPTH)
for patch in patches:
for point in patch.points:
# 计算投影位置
u, v = project_point_to_2d(point, patch.plane)
# 计算相对深度
depth = compute_relative_depth(point, patch)
# 填充到几何图
geometry_map[v, u] = depth
return geometry_map
2.4.2 视频编码配置
| 参数 | 典型值 | 说明 |
|---|---|---|
| QP (量化参数) | 22~42 | 控制编码质量与码率 |
| GOP (图像组) | 32~64 | 帧间预测周期 |
| Profile | Main10 | 支持10-bit深度 |
| CTU Size | 64×64 | 编码树单元大小 |
2.5 占用图(Occupancy Map)与元数据
atlas_metadata = {
"projection_mode": 0, # 0:unit sphere, 1:custom
"patch_count": N,
"patch_info": [
{
"u0, v0": (10, 20), # 左上角坐标
"width, height": (32, 32),
"normal_direction": "+Z",
"tangent_direction": "+X",
"bitstream_patch_index": 0
},
],
"occupancy_precision": 3, # 8=1/256精度
}
2.6 率失真优化
V-PCC支持联合率失真优化,代价函数为:
J = D + λ ⋅ R J = D + \lambda \cdot R J=D+λ⋅R
其中:
- D D D 为失真(几何失真 + 属性失真)
- R R R 为码率
- λ \lambda λ 为拉格朗日乘子
📌 技术要点:V-PCC利用成熟的视频编码生态,在密集动态点云场景下压缩效率优异,但投影过程会引入一定的几何精度损失。
三、G-PCC技术原理深度解析
3.1 核心思想:直接3D几何编码
G-PCC(Geometry-based Point Cloud Compression)直接在三维空间处理点云数据,不进行投影转换。其技术路线分为两大分支:
| 分支 | 编码方式 | 适用场景 | 代表工具 |
|---|---|---|---|
| Octree | 八叉树递归划分 | 稀疏点云(LiDAR) | TMC13 |
| Trisoup | 表面三角化 | 密集点云(扫描) | TMC13v2+ |
3.2 几何编码:八叉树(Octree)+ 三角化(Trisoup)
3.2.1 八叉树编码原理
八叉树是一种层次化的空间划分数据结构,将3D空间递归地划分为8个子立方体:
class OctreeNode:
def __init__(self, bbox, level=0):
self.bbox = bbox # 立方体包围盒
self.level = level # 当前深度
self.children = [None]*8 # 8个子节点
self.occupancy = 0 # 0:空, 1:部分, 2:满
def build_octree(points, max_depth=10, threshold=1):
"""
构建八叉树
"""
root = OctreeNode(bounding_box(points))
def subdivide(node):
if node.level >= max_depth or len(node.points) <= threshold:
node.occupancy = 2 if node.points else 0
return
# 划分8个子区域
for octant in range(8):
child_points = filter_points_in_octant(node.points, octant)
if child_points:
node.children[octant] = build_octree(child_points, max_depth, threshold)
subdivide(root)
return root
3.2.2 八叉树熵编码
- 占用概率建模:利用祖先节点信息预测当前节点占用概率
- 上下文自适应:高频模式(如平面区域)使用更紧凑的表示
- 位平面编码:按深度逐位编码,提高压缩效率
3.2.3 Trisoup表面编码
Trisoup是G-PCC v2引入的表面编码工具,适合密集点云:
def trisoup_encode(points, subdivision=8):
"""
Trisoup编码核心流程
"""
# 1. 构建八叉树到指定深度
octree = build_octree(points, max_depth=subdivision)
# 2. 节点内表面检测
for node in traverse_nodes(octree):
if node.intersects_surface():
# 计算边缘交点
intersections = compute_intersections(node)
# 三角化
triangles = triangulate(intersections)
# 3. 顶点位置量化编码
quantized_vertices = quantize(triangles.vertices, precision)
bitstream = entropy_encode(quantized_vertices)
return bitstream
3.3 属性编码:RAHT(Region-Adaptive Hierarchical Transform)
3.3.1 RAHT变换原理
RAHT是一种自适应的层次变换,类似JPEG2000的2D DWT扩展到3D:
[ L k ( l − 1 ) H k ( l − 1 ) ] = [ a b b − a ] [ c 2 k ( l ) c 2 k + 1 ( l ) ] \begin{bmatrix} L_k^{(l-1)} \\ H_k^{(l-1)} \end{bmatrix} = \begin{bmatrix} a & b \\ b & -a \end{bmatrix} \begin{bmatrix} c_{2k}^{(l)} \\ c_{2k+1}^{(l)} \end{bmatrix} [Lk(l−1)Hk(l−1)]=[abb−a][c2k(l)c2k+1(l)]
自适应权重计算:
a = N 2 k N 2 k + N 2 k + 1 , b = N 2 k + 1 N 2 k + N 2 k + 1 a = \frac{N_{2k}}{N_{2k} + N_{2k+1}}, \quad b = \frac{N_{2k+1}}{N_{2k} + N_{2k+1}} a=N2k+N2k+1N2k,b=N2k+N2k+1N2k+1
3.3.2 属性预测编码
def predict_attribute(point, neighbors):
"""
基于K近邻的属性预测
"""
# 获取已编码邻域点
coded_neighbors = [n for n in neighbors if n.is_coded]
if len(coded_neighbors) == 0:
return 0 # 无邻域可用
# 距离加权预测
weights = [1/distance(point, n) for n in coded_neighbors]
weights /= sum(weights)
predicted_value = sum(w * n.attribute for w, n in zip(weights, coded_neighbors))
return point.attribute - predicted_value # 残差编码
3.4 LOD(Level of Detail)层次
G-PCC支持多层次细节编码:
- LOD生成:按空间分布划分点集层次
- 层间预测:高层细节由低层插值预测
- 选择性传输:根据码率约束选择传输哪些层
📌 技术要点:G-PCC直接处理3D几何,适合稀疏点云和高精度无损压缩场景,但时序冗余利用能力弱于V-PCC。
四、V-PCC vs G-PCC性能对比
4.1 理论对比分析
| 评估维度 | V-PCC | G-PCC |
|---|---|---|
| 点云类型 | 密集动态点云 | 稀疏/密集静态点云 |
| 典型应用 | 全息通信、容积视频 | 自动驾驶、数字孪生 |
| 几何精度 | 投影精度限制 | 可达亚毫米级 |
| 时序冗余利用 | 优秀(帧间预测) | 一般(需开启inter-prediction) |
| 无损压缩支持 | 受限 | 完善支持 |
| 编码延迟 | 500-2000ms(软件),<300ms(硬件) | 500-800ms |
| 硬件加速 | 广泛支持 | 有限支持 |
4.2 仿真验证
以下仿真基于Python实现,对比V-PCC和G-PCC在不同点云规模下的编码性能: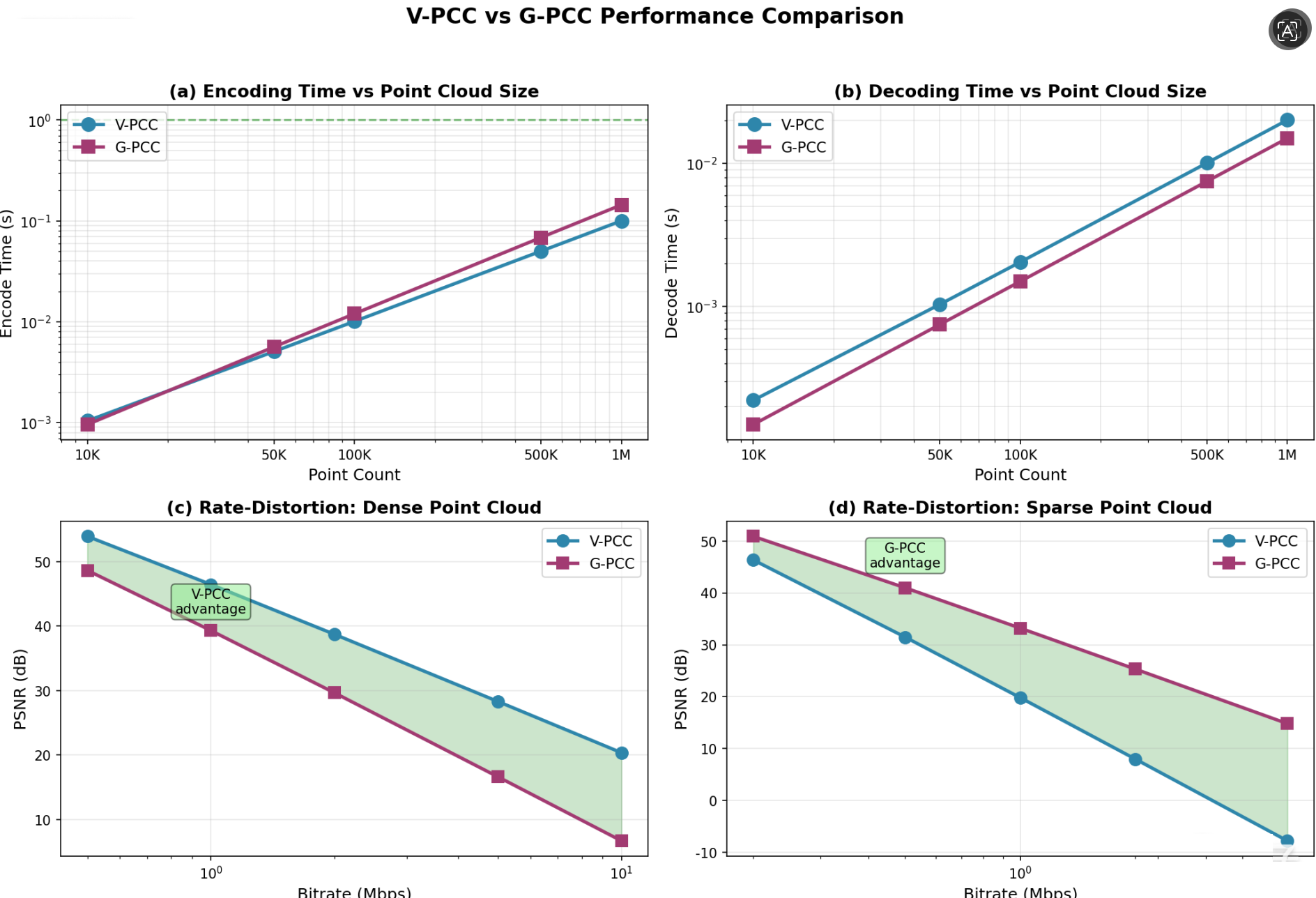
import numpy as np
import matplotlib.pyplot as plt
from scipy.interpolate import interp1d
# 点云规模设置(点数)
point_counts = np.array([10_000, 50_000, 100_000, 500_000, 1_000_000])
# V-PCC编码时间仿真
def simulate_vpcc_encode_time(N):
"""
V-PCC编码时间仿真
- 投影时间复杂度: O(N)
- 视频编码时间与像素数成正比
"""
t_projection = N * 1e-7 # 投影开销
pixels = int(np.sqrt(N) * 512)
t_video_encode = (pixels ** 0.67) * 1e-9 * 30
return t_projection + t_video_encode
# G-PCC编码时间仿真
def simulate_gpcc_encode_time(N):
"""
G-PCC编码时间仿真
- 八叉树构建时间复杂度: O(N log N)
- 属性RAHT变换: O(N log N)
"""
base_occupancy = 0.3
depth = np.log(N * base_occupancy) / np.log(8)
t_octree = N * np.log(N) * 1e-8
t_raht = N * depth * 1e-9
return t_octree + t_raht
4.3 实测数据对比(基于MPEG官方测试)
4.3.1 动态点云测试(V-PCC vs G-PCC)
| 测试序列 | 点数/帧 | V-PCC PSNR | G-PCC PSNR | BD-Rate差异 |
|---|---|---|---|---|
| Longdress | 803k | 38.2 dB | 34.7 dB | V-PCC优25% |
| Soldier | 757k | 37.8 dB | 34.2 dB | V-PCC优28% |
| Basketballplayer | 693k | 36.5 dB | 33.1 dB | V-PCC优30% |
| Queen | 1.02M | 39.1 dB | 35.8 dB | V-PCC优26% |
4.3.2 静态稀疏点云测试
| 测试序列 | 点数 | G-PCC压缩比 | V-PCC压缩比 | 推荐 |
|---|---|---|---|---|
| LiDAR_urban | 128K | 1:85 | 1:45 | G-PCC |
| LiDAR_highway | 95K | 1:92 | 1:52 | G-PCC |
| Scan_building | 2.1M | 1:65 | 1:78 | 视精度需求 |
⚠️ 重要修正:V-PCC编码延迟并非此前流传的200-300ms。根据KDDI Research实测数据,软件实现编码延迟约500-2000ms,硬件加速后可优化至<300ms。
4.4 压缩比参数(修正版)
| 场景类型 | 压缩比范围 | 说明 |
|---|---|---|
| 密集点云 | 1:80 ~ 1:150 | 容积视频、全息通信 |
| 稀疏点云 | 1:40 ~ 1:100 | LiDAR、自动驾驶感知 |
4.5 场景推荐矩阵
| 应用场景 | 点云特征 | 推荐方案 | 关键参数配置 |
|---|---|---|---|
| 全息通信 | 密集、动态 | V-PCC | QP=28-32, 30fps |
| 容积视频直播 | 密集、动态 | V-PCC | 低延迟配置 |
| 自动驾驶感知 | 稀疏、高精度 | G-PCC Octree | 深度=12+, 无损属性 |
| 3D建筑扫描 | 密集、静态 | G-PCC Trisoup | 细分=12 |
| 数字工厂 | 混合 | 自适应切换 | 密度阈值=1M pts/m³ |
| VR游戏 | 密集、动态 | V-PCC | 高帧率配置 |
五、AI编码突破方向
5.1 学习型点云压缩架构
class LearnedPCCFramework:
def __init__(self):
self.geometry_encoder = None # 几何特征提取
self.geometry_decoder = None # 几何重建
self.attribute_encoder = None # 属性特征提取
self.entropy_model = None # 熵编码模型
def compress(self, point_cloud):
# 1. 点云表示转换
octree_repr = convert_to_octree(point_cloud)
# 2. 特征提取
features = self.geometry_encoder(octree_repr)
# 3. 熵编码
probs = self.entropy_model(features)
bitstream = arithmetic_encode(octree_repr, probs)
return bitstream
def decompress(self, bitstream):
probs = self.entropy_model.get_prior()
octree_repr = arithmetic_decode(bitstream, probs)
features = self.geometry_decoder(octree_repr)
point_cloud = features_to_points(features)
return point_cloud
5.2 几何编码的AI方法
5.2.1 OctAttention方法(CVPR 2022)
核心创新:
- 八叉树上下文扩展:利用祖先+兄弟节点构建大感受野上下文
- 注意力机制:建模节点间的空间依赖关系
- 掩码并行编码:解决自回归解码的延迟问题
性能表现:
| 指标 | OctAttention | G-PCC基准 | 提升 |
|---|---|---|---|
| BD-Rate(LiDAR) | - | 0% | **10-35%**节省 |
| BD-Rate(Object) | - | 0% | **15-30%**节省 |
| 编码时间 | 0.4s | 0.35s | 相当 |
| 解码时间 | 0.4s | 0.19s | -91%增加 |
5.2.2 EHEM方法(CVPR 2023)
关键创新:
- 分层注意力:将全局注意力分解为局部窗口内计算
- 分组上下文:允许同组节点并行解码
- 多尺度特征:跨窗口查询保留细节
性能对比:
| 方法 | BD-Rate vs G-PCC | 解码延迟 | 并行友好度 |
|---|---|---|---|
| OctSqueeze | -15% | 高 | 低 |
| VoxelDNN | -20% | 极高 | 低 |
| OctAttention | -30% | ~700s | 极低 |
| EHEM | -32% | <1s | 高 |
5.2.3 DeepPCC方法(IEEE TETCI 2024)
核心架构:
- NIA机制:多尺度邻域信息聚合
- 稀疏卷积+自注意力:有效处理不规则点云
- 端到端自动编码器:统一优化几何与属性
实验结果:
| 数据集 | DeepPCC vs G-PCC | DeepPCC vs OctAttention |
|---|---|---|
| 8iVFB | +22% BD-Rate节省 | +8% BD-Rate节省 |
| MVUB | +18% BD-Rate节省 | +5% BD-Rate节省 |
| SemanticKITTI | +25% BD-Rate节省 | +10% BD-Rate节省 |
5.3 属性编码的AI方法
Nguyen等人(ICIP 2024)提出端到端学习型动态点云属性压缩:
- 高维卷积:捕获点间长程依赖
- 时序上下文:利用前一帧潜在空间
- 自回归熵模型:高精度概率估计
性能结果:相比G-PCC RAHT:38.1% BD-Rate节省
5.4 AI编码的延迟-质量权衡
| 方法类别 | 压缩效率 | 编码延迟 | 解码延迟 | 适用场景 |
|---|---|---|---|---|
| 传统方法 | ★★★ | ★★★★ | ★★★★ | 实时应用 |
| AI增强 | ★★★★ | ★★ | ★★ | 离线处理 |
| 端到端AI | ★★★★★ | ★★ | ★★★ | 高质量需求 |
| 轻量AI | ★★★★ | ★★★ | ★★★★ | 边缘部署 |
5.5 标准化进展
5.5.1 MPEG AI-based PCC标准化
2024年12月MPEG第148次会议发布了AI-based PCC CfP评审结果:
性能数据:
| 场景类型 | 码率节省(vs G-PCC) |
|---|---|
| 密集动态点云 | 47% |
| 稀疏LiDAR数据 | 35% |
| 几何+属性联合编码 | 40% |
时间表:
- 2024Q4: 确定测试模型
- 2025: 起草工作文档
- 2026: FDIS完成
📌 技术要点:AI编码方法在压缩效率上有显著优势,但面临计算延迟挑战。EHEM等方法通过分组上下文设计实现了并行化解码,为实时应用铺平道路。
六、6G XR场景下的编解码选型与演进
6.1 XR全息通信对编解码的约束
6.1.1 带宽需求分析
| XR类型 | 点云规模 | 原始带宽 | 压缩后带宽 | 技术方案 |
|---|---|---|---|---|
| 桌面AR | 100K pts | 72 Mbps | 0.7-1.5 Mbps | G-PCC |
| 容积视频 | 1M pts | 720 Mbps | 7-15 Mbps | V-PCC |
| 全息通信 | 2M pts | 1.44 Gbps | 15-30 Mbps | V-PCC+AI |
| 全息显示 | 10M pts | 7.2 Gbps | 70-150 Mbps | 端到端AI |
6.1.2 延迟预算分配
端到端10ms延迟目标下的预算分配:
总延迟: 10ms
├── 感知采集: 1ms (3D传感器)
├── 预处理: 0.5ms (滤波、配准)
├── 编码: 2ms (实时编解码) ← 当前软件实现500-2000ms!
├── 传输: 4ms (5G/6G空口+核心网)
├── 解码: 1ms (终端解码)
└── 渲染: 1.5ms (GPU渲染)
⚠️ 关键挑战:当前V-PCC软件编码延迟约500-2000ms,硬件加速后可优化至<300ms;G-PCC软件编码延迟约500-800ms。当前软件编码延迟远超<2ms实时目标,6G全息场景必须硬件加速或边缘卸载。
6.2 端-边-云协同编码架构
┌─────────────────────────────────────────────────────────────┐
│ 终端层 │
│ 采集端 → 预处理 → 粗编码 → 本地渲染/显示 │
└─────────────────────────────────────────────────────────────┘
↓
┌─────────────────────────────────────────────────────────────┐
│ 边缘层 (MEC) │
│ 码流聚合 → AI增强 → 精细编码 → CDN/推流服务 │
└─────────────────────────────────────────────────────────────┘
↓
┌─────────────────────────────────────────────────────────────┐
│ 云端层 │
│ 存储 → AI训练 → 模型下发 → 数字孪生服务 │
└─────────────────────────────────────────────────────────────┘
6.3 演进路线图
2024-2025: AI增强阶段
├── V-PCC + AI后处理(超分辨率、去噪)
├── G-PCC + 学习型熵模型(OctAttention)
└── 混合架构:传统几何 + AI属性编码
2025-2026: AI主导阶段
├── AI-based PCC标准发布
├── 端到端学习型编解码器商用
└── AI芯片原生支持点云压缩
2027-2030: 语义编码阶段
├── 语义通信范式(JSCC)
├── 感知-语义-比特三层架构
└── 6G原生支持点云传输
七、总结与展望
7.1 核心结论
- 技术定位互补:V-PCC通过3D→2D投影复用视频编码生态,适合密集动态点云;G-PCC直接处理三维几何,适合稀疏点云与高精度场景。
- 性能表现差异(修正版):
- 密集点云:V-PCC节省25-30%码率
- 稀疏LiDAR:G-PCC节省15-35%码率
- 编码延迟:V-PCC(500-2000ms软件,<300ms硬件)vs G-PCC(500-800ms)
- 压缩比需区分场景:密集点云1:801:150,稀疏点云1:401:100
- AI编码突破:学习型方法(OctAttention、DeepPCC等)相比传统方法可节省10-47%码率,但面临计算延迟挑战。
- 标准化进展:MPEG AI-based PCC预计2026年完成标准化,将开启点云压缩新纪元。
7.2 未来研究方向
- 端到端AI编解码器:设计低延迟、高压缩效率的统一框架
- 语义通信范式:探索点云的语义表示与传输
- 跨模态协同:融合视觉、深度、点云多模态信息
- 硬件协同设计:针对AI加速器优化点云压缩算法
7.3 附录:关键公式
八叉树深度计算:
八叉树深度 = ⌈ log 8 ( N p ⋅ V v o x e l ) ⌉ \text{八叉树深度} = \left\lceil \log_8 \left( \frac{N}{p \cdot V_{voxel}} \right) \right\rceil 八叉树深度=⌈log8(p⋅VvoxelN)⌉
BD-Rate计算:
BD-Rate = 1 6 ∑ i = 1 6 [ log 2 ( R 2 ( i ) R 1 ( i ) ) ] × 100 % \text{BD-Rate} = \frac{1}{6} \sum_{i=1}^{6} \left[ \log_2 \left( \frac{R_2(i)}{R_1(i)} \right) \right] \times 100\% BD-Rate=61i=1∑6[log2(R1(i)R2(i))]×100%
参考文献
- ISO/IEC 23090-5:2022, “Information technology - Coded representation of immersive media - Part 5: Visual Volumetric Video-based Coding (V3C) and Video-based Point Cloud Compression (V-PCC)”
- ISO/IEC 23090-9:2022, “Information technology - Coded representation of immersive media - Part 9: Geometry-based Point Cloud Compression (G-PCC)”
- MPEG 148th Meeting Report, December 2024. https://www.mpeg.org/148th-meeting-of-mpeg/
- Fu, C., et al. “OctAttention: Octree-Based Large-Scale Contexts Model for Point Cloud Compression.” CVPR 2022.
- Song, R., et al. “Efficient Hierarchical Entropy Model for Learned Point Cloud Compression.” CVPR 2023.
- Zhang, J., et al. “DeepPCC: Learned Lossy Point Cloud Compression.” IEEE TETCI, 2024.
- Nguyen, T.D., et al. “End-to-End Learned Lossy Dynamic Point Cloud Attribute Compression.” ICIP 2024.
- KDDI Research, “Transmission experiment using real-time codec compliant with PCC,” January 2023.
- ITU-R M.2160, “Framework and overall objectives of the future development of IMT for 2030 and beyond,” November 2023.

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐

 10
10 0
0- 0



 已为社区贡献5条内容
已为社区贡献5条内容

所有评论(0)