3ds Max 三维动画制作课程期末大作业:从建模到动画的全流程实践与心得
一、项目概述
在三维动画制作课程的学习过程中,我以 3ds Max 为核心工具,完成了一组包含多个独立片段的动画作品,内容涵盖基础建模、骨骼绑定、路径动画、粒子系统、关键帧动画等多个课程核心知识点,完整呈现了从创意构思、模型搭建到动画调试、最终渲染的全流程实践过程。本项目不仅是对课堂所学知识的综合运用,也是我对三维动画制作逻辑、技术难点和创意表达的一次深度探索,以下将从项目内容、制作流程、技术实现、问题解决与学习心得五个方面展开详细讲解。
二、项目整体内容与作品展示
本次期末作业由七个独立的动画片段组成,每个片段对应一个课程核心知识点,从基础模型到复杂动画,循序渐进地完成了三维动画制作的完整闭环:
-
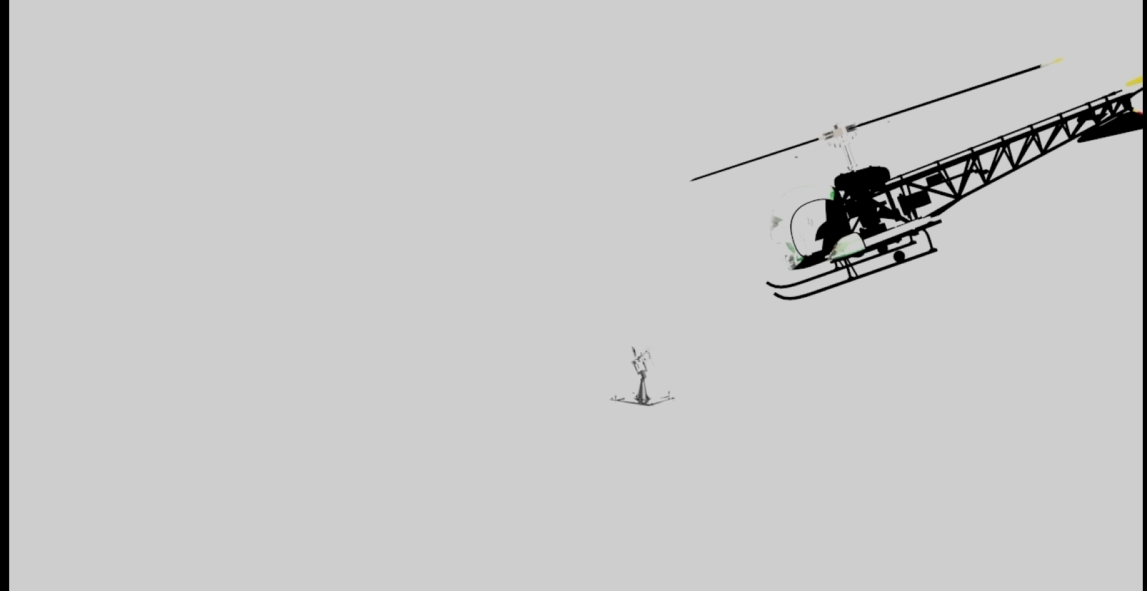
直升机飞行动画:利用路径约束和关键帧动画,实现直升机沿预设轨迹的飞行效果,结合摄影机跟随,模拟真实的飞行视角。
-
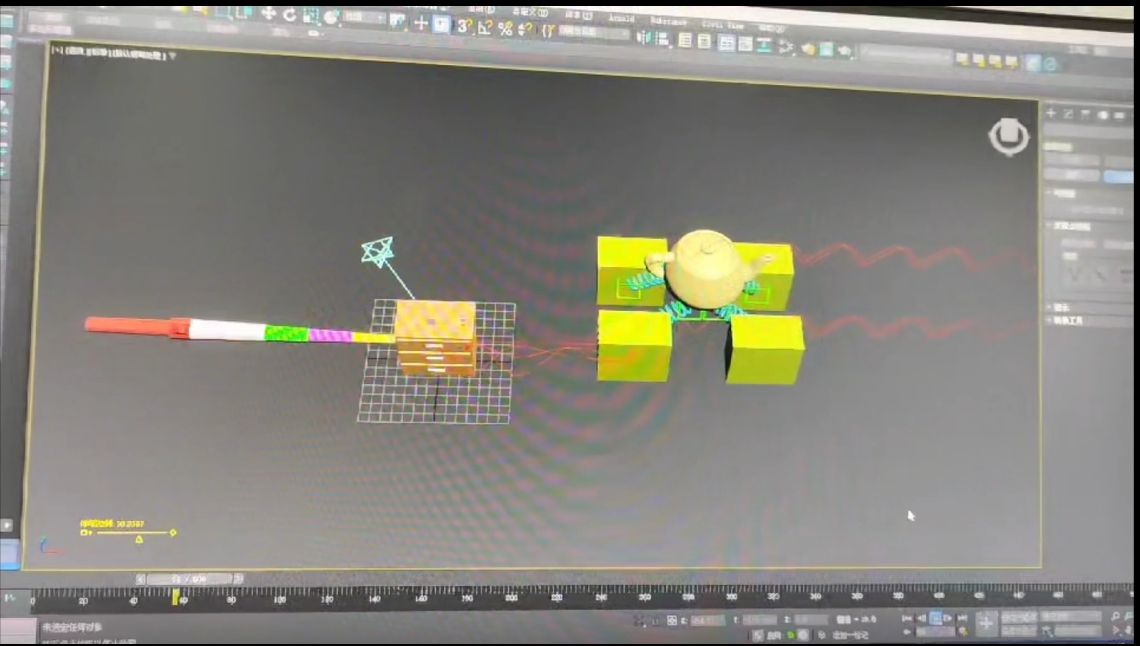
机械联动与弹簧动画:使用 3ds Max 的弹簧控制器和反应管理器,制作了茶壶在方块上的弹性运动效果,同时通过路径动画实现了画笔与抽屉的联动,直观展示了参数关联动画的实现逻辑。
-
防空炮瞄准射击动画:通过骨骼绑定和关键帧动画,实现了防空炮的炮管俯仰、水平旋转的瞄准动作,还原了武器的机械运动逻辑。
-
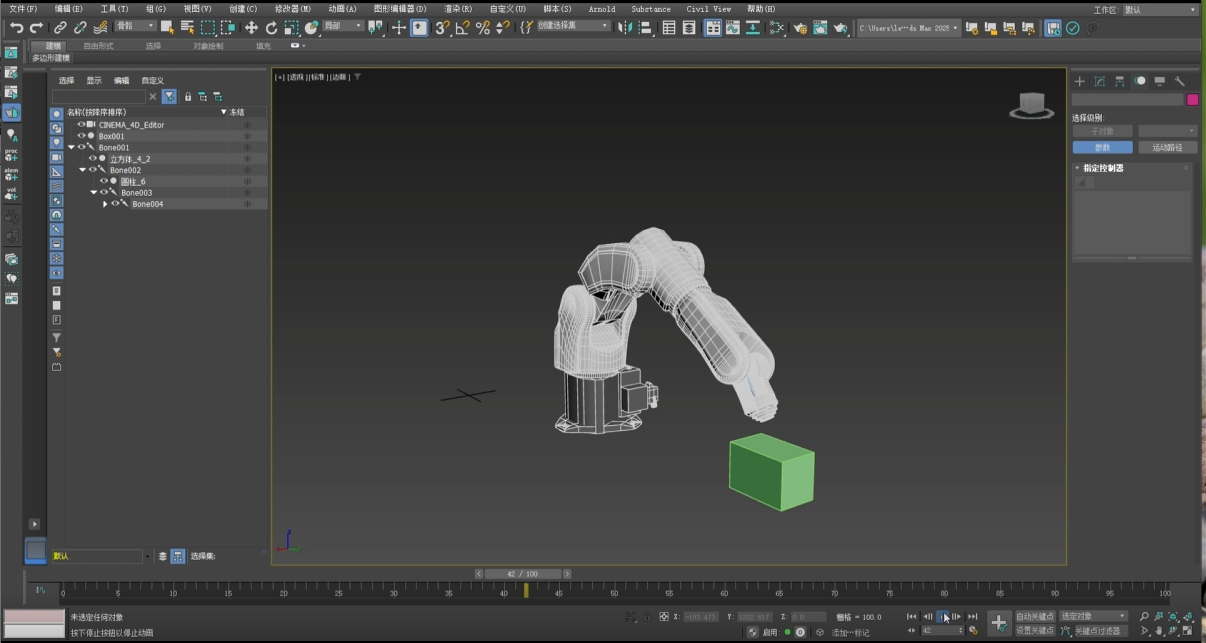
机械臂抓取动画:为机械臂模型添加骨骼并设置 IK 反向动力学,实现机械臂从伸展到抓取方块的连贯动作,重点解决了骨骼关节运动的流畅性问题。
-
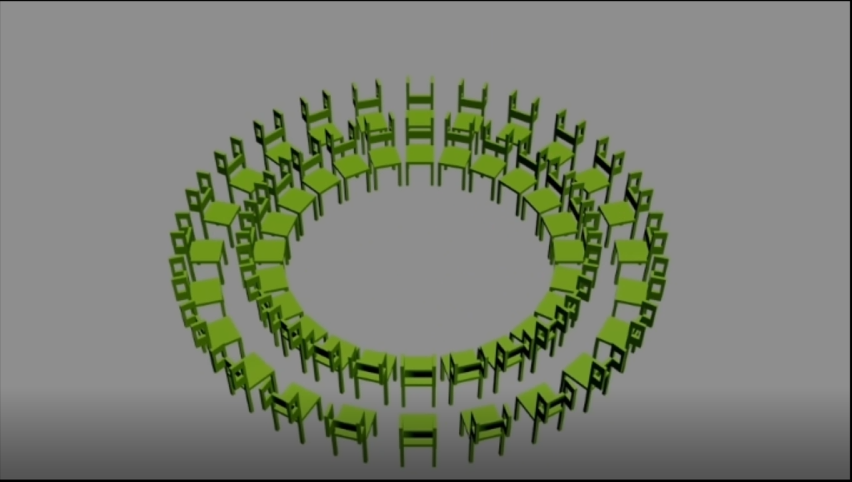
环形阵列建模:使用阵列工具制作了环形排列的椅子模型,通过参数化复制快速实现批量模型的等距分布,掌握了高效建模的技巧。
-
植物模型搭建:使用 3ds Max 的多边形建模和散布工具,制作了带枝干和叶片的树木模型,学习了有机模型的布线和层级管理方法。
-
工厂流水线动画:结合路径动画和关键帧,制作了机械臂、传送带与茶壶的联动动画,模拟了自动化生产场景,重点调试了多个物体的运动同步性。
三、制作流程与核心技术实现
(一)前期准备:从创意到规划
三维动画制作的第一步,不是直接打开软件建模,而是完成清晰的项目规划。
- 需求拆解:课程要求我们覆盖课程全部核心知识点,因此我将项目拆解为 “建模、绑定、动画、渲染” 四大模块,每个模块对应 1-2 个片段,确保每个知识点都有实践落地。
- 参考收集:针对直升机、机械臂、防空炮等模型,我收集了大量真实的机械结构参考图,避免建模过程中出现结构逻辑错误;同时参考了流水线、飞行动画的镜头语言,确定了每个片段的镜头运动方式。
- 时间规划:根据每个片段的难度,分配了制作时间:基础建模占比 30%,骨骼绑定与动画调试占比 50%,渲染与后期占比 20%,确保项目在课程结束前能完整交付。
(二)建模阶段:从基础几何体到完整模型
建模是三维动画的基础,模型的布线、拓扑直接影响后续的绑定和动画效果,本次作业中我主要使用了三种建模方式:
- 基础几何体建模:椅子、方块、传送带等简单模型,通过修改标准几何体(长方体、圆柱体)的分段数,添加编辑多边形修改器,调整顶点、边、面来塑造基础形状,重点练习了多边形建模的基础操作,如挤出、倒角、桥接等。
- 多边形细分建模:直升机、机械臂、防空炮等机械模型,采用了 “低模搭建 + 高模细化” 的流程,先通过基础几何体搭建出模型的整体结构,再通过添加涡轮平滑修改器,调整平滑迭代次数,让模型边缘更圆润;树木模型则通过搭建枝干低模,再用散布工具将叶片模型批量分布到枝干上,快速实现了植物的细节效果。
- 参数化阵列建模:环形椅子的制作是建模阶段的重点练习,通过 “工具 - 阵列” 功能,设置阵列的旋转角度、复制数量和偏移参数,快速实现了椅子的环形排列,既提高了建模效率,也掌握了参数化建模的逻辑。在建模过程中,我也踩了不少坑:比如机械臂模型初期布线过于混乱,导致后续骨骼绑定的时候出现模型拉扯变形的问题,后来通过重新调整拓扑结构,减少不必要的分段,优化了布线走向,解决了变形问题。
(三)骨骼绑定与动力学动画:让模型 “动起来”
动画的核心是让模型的运动符合物理逻辑,本次作业中我使用了多种动画技术,实现不同类型的运动效果:
- 正向 / 反向动力学(FK/IK)绑定:机械臂和防空炮的动画,使用了骨骼绑定和 IK 反向动力学控制器。先为机械臂添加层级骨骼,将骨骼与模型进行蒙皮绑定,再为末端骨骼添加 IK 解算器,通过调整末端控制器的位置,带动整个机械臂关节运动,解决了多关节联动的问题;防空炮的炮管旋转,则通过 FK 正向动力学,直接调整骨骼的旋转关键帧,实现炮管的俯仰和水平转动。
- 路径约束动画:直升机和画笔的运动,使用了路径约束控制器。先创建一条样条线作为运动路径,再将模型绑定到路径上,通过调整路径约束的百分比参数,设置模型沿路径运动的关键帧;同时为摄影机添加路径约束,让摄影机跟随直升机运动,模拟出真实的飞行视角。
- 弹簧与反应管理器动画:茶壶在方块上的弹性运动,使用了弹簧控制器和反应管理器。为茶壶添加弹簧修改器,设置弹簧的刚度、阻尼参数,让茶壶在方块上产生自然的弹跳效果;同时通过反应管理器,将画笔的位置与抽屉的开合进行参数关联,实现了画笔随抽屉开合同步运动的联动效果。
- 关键帧动画:流水线传送带、茶壶的运动,主要使用了基础关键帧动画。通过打开 “自动关键点” 按钮,在不同时间点调整模型的位置、旋转、缩放参数,让软件自动生成中间帧;同时通过曲线编辑器调整动画曲线,让运动从生硬的直线运动变成更自然的缓入缓出效果。这个阶段是我遇到问题最多的环节,比如机械臂的骨骼绑定初期出现了严重的蒙皮拉扯,后来通过调整蒙皮权重,为每个关节设置合理的影响范围,解决了模型变形的问题;弹簧动画的阻尼参数调试也花了大量时间,才让茶壶的弹跳效果既自然又不夸张。
(四)渲染与后期:让作品更完整
模型和动画制作完成后,需要通过渲染输出最终的动画片段,本次作业我使用了 3ds Max 自带的扫描线渲染器,结合课程所学的灯光与材质知识,完成了渲染工作:
- 灯光设置:为每个片段添加了主光源和辅助光源,模拟自然光效果,通过调整灯光的强度、颜色和阴影参数,避免模型出现死黑或过曝的问题;流水线片段中,我还添加了体积光效果,让场景更有氛围感。
- 材质设置:为不同模型添加了对应的材质,比如金属材质的机械臂、塑料材质的茶壶、木质的椅子,通过调整漫反射、高光和反射参数,让模型的质感更真实;树木的叶片材质,通过添加透明贴图,实现了叶片的半透明效果。
- 渲染输出:将每个片段渲染为 AVI 格式的动画文件,设置合适的渲染分辨率和帧率(25 帧 / 秒),同时调整输出范围,确保每个动画片段的时长符合设计要求;最后通过视频剪辑软件,将所有片段拼接起来,添加简单的转场效果,完成了最终的作业作品。
四、制作中的问题与解决方法
三维动画制作是一个不断解决问题的过程,本次作业中我遇到了不少典型问题,也总结了对应的解决方法:
- 模型布线混乱导致绑定变形
- 问题描述:机械臂模型初期布线没有遵循环形布线原则,关节处的分段数不合理,导致骨骼绑定后,关节弯曲时模型出现严重的拉扯变形。
- 解决方法:重新调整模型拓扑结构,在关节处添加环形分段,让布线走向与骨骼运动方向一致;在蒙皮阶段,通过权重画笔手动调整关节处的权重分布,减少无关顶点的影响,解决了变形问题。
- 动画运动生硬、不自然
- 问题描述:关键帧动画的初始效果,模型运动非常生硬,像 “机器人” 一样,没有真实的运动节奏。
- 解决方法:进入曲线编辑器,将关键帧的切线类型从 “线性” 改为 “平滑” 或 “缓入缓出”,调整曲线的曲率,让模型的运动速度有变化;同时添加 “跟随” 和 “重叠” 动作,比如直升机飞行时,机身有轻微的上下晃动,让动画更符合真实物理规律。
- 多物体联动不同步
- 问题描述:流水线动画中,传送带、机械臂和茶壶的运动节奏不一致,导致联动效果混乱。
- 解决方法:统一所有物体的动画时间轴,以传送带的运动节奏为基准,调整机械臂和茶壶的关键帧时间点;通过反应管理器将多个物体的参数进行关联,让一个物体的运动自动带动其他物体同步运动,确保联动效果流畅自然。
- 渲染速度慢、效果差
- 问题描述:模型面数过高,导致渲染时电脑卡顿,且灯光阴影出现锯齿、过曝等问题。
- 解决方法:对模型进行减面处理,删除不必要的隐藏面,优化模型面数;灯光设置中开启阴影贴图,调整阴影偏移和采样参数,减少锯齿效果;降低渲染分辨率测试渲染,最终输出时再使用高分辨率,平衡渲染速度和效果。
五、学习心得与总结
通过本次三维动画制作课程的期末大作业,我不仅系统掌握了 3ds Max 的建模、绑定、动画和渲染流程,更对三维动画制作的底层逻辑有了全新的理解:
- 三维动画是 “细节的艺术”:一个流畅的动画效果,往往需要无数个细节的调试 —— 模型的布线、骨骼的权重、动画的曲线、灯光的参数,每一个细节都会影响最终的呈现效果。比如直升机飞行时,螺旋桨的旋转速度、机身的轻微晃动,这些看似不起眼的细节,却能让动画瞬间变得真实可信。
- 逻辑比工具更重要:3ds Max 只是一个工具,真正决定作品质量的,是对模型结构、物理运动、镜头语言的理解。比如机械臂的动画,不是简单地移动模型,而是要理解机械臂的运动逻辑 —— 关节的旋转顺序、末端执行器的运动轨迹,只有理清了底层逻辑,才能做出合理的动画效果。
- 耐心和调试是必备技能:三维动画制作没有 “一步到位” 的效果,几乎每个环节都需要反复调试。弹簧动画的阻尼参数、蒙皮权重的分布、灯光的强度,都需要通过不断测试和修改,才能达到理想的效果。这个过程虽然繁琐,但也让我学会了沉下心来解决问题,提高了自己的耐心和问题排查能力。
- 知识的综合运用才是关键:本次作业中,没有任何一个片段只用到了单一知识点,比如流水线动画,既用到了建模,也用到了关键帧、路径动画、灯光材质,是多个知识点的综合运用。这让我明白,三维动画制作不是孤立的知识点堆砌,而是一个完整的流程,只有将所学知识融会贯通,才能完成高质量的作品。本次课程和期末作业,为我打开了三维动画制作的大门,也让我意识到自己还有很多需要学习的地方,比如角色动画、粒子特效、高级渲染等。未来我会继续深入学习三维动画相关知识,不断提升自己的技术水平,尝试制作更复杂、更有创意的三维动画作品。

六、致谢
最后,感谢课程老师在课堂上的耐心讲解和课后的答疑指导,让我能够顺利完成本次期末大作业;也感谢同学们在学习过程中的交流和帮助,让我解决了不少制作中的难题。本次作业是我三维动画制作学习路上的一个重要节点,也将成为我未来继续探索的起点。


AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐



 4
4 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)