YOLOv8杂草识别检测系统(项目源码+YOLO数据集+模型权重+UI界面+python+深度学习+环境配置)
摘要
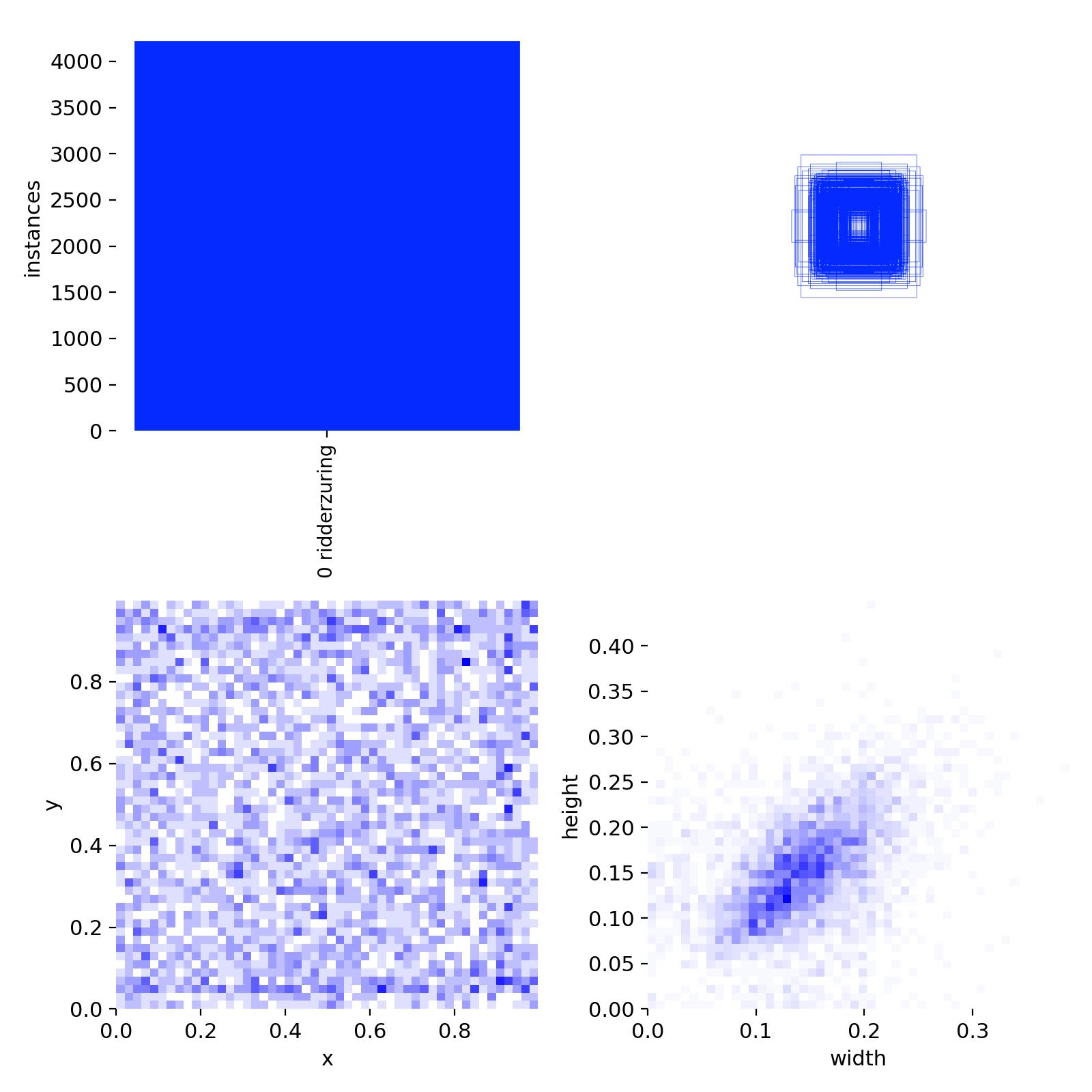
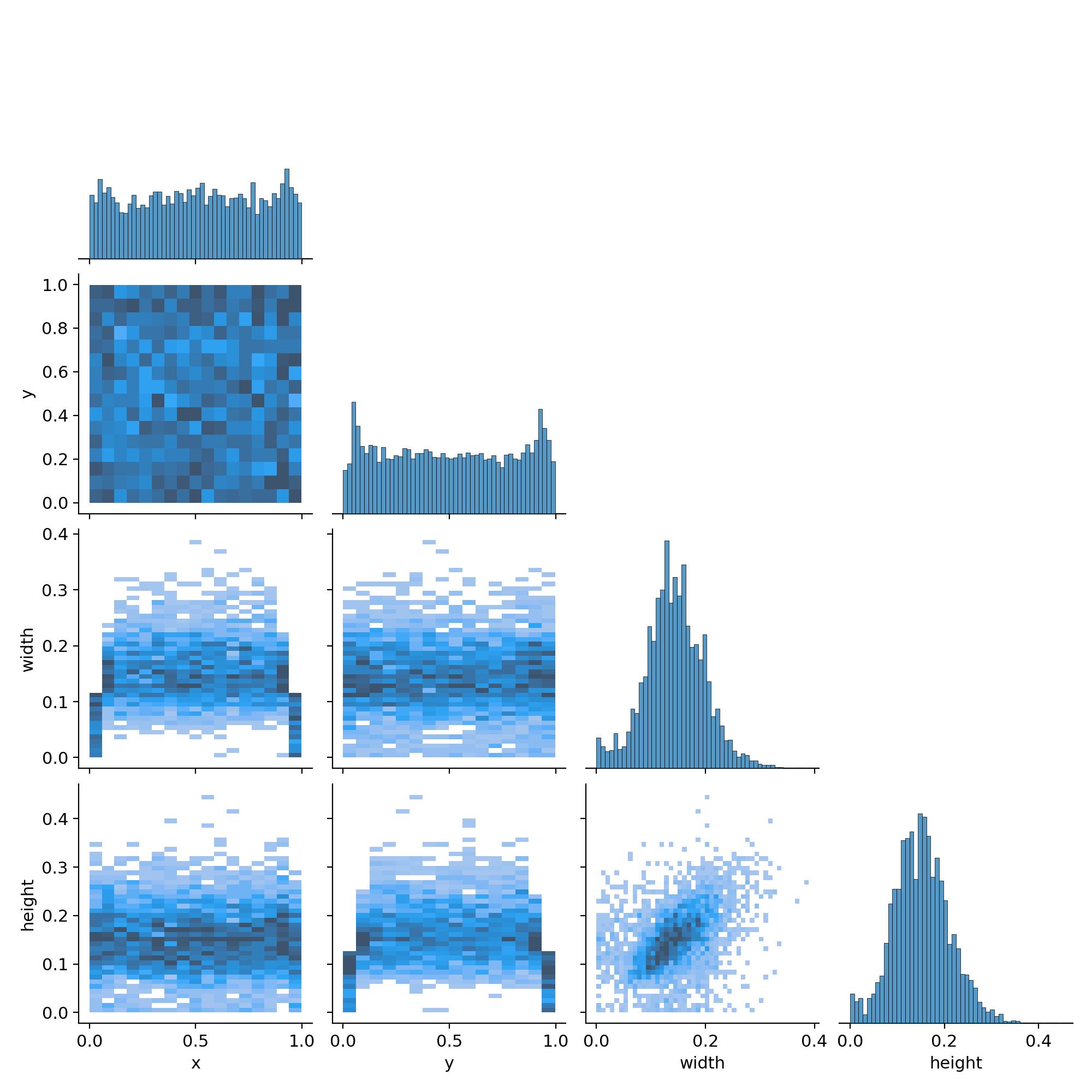
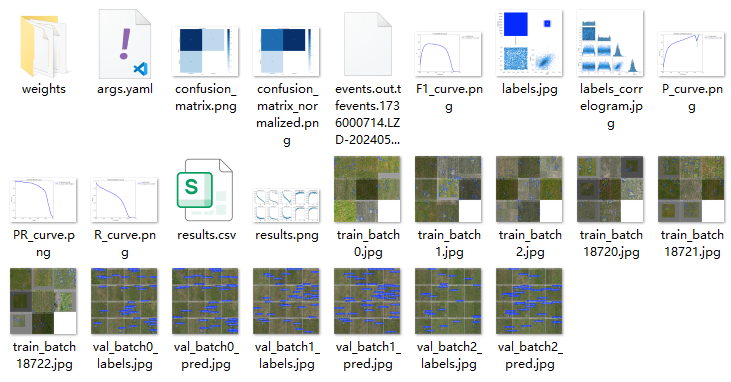
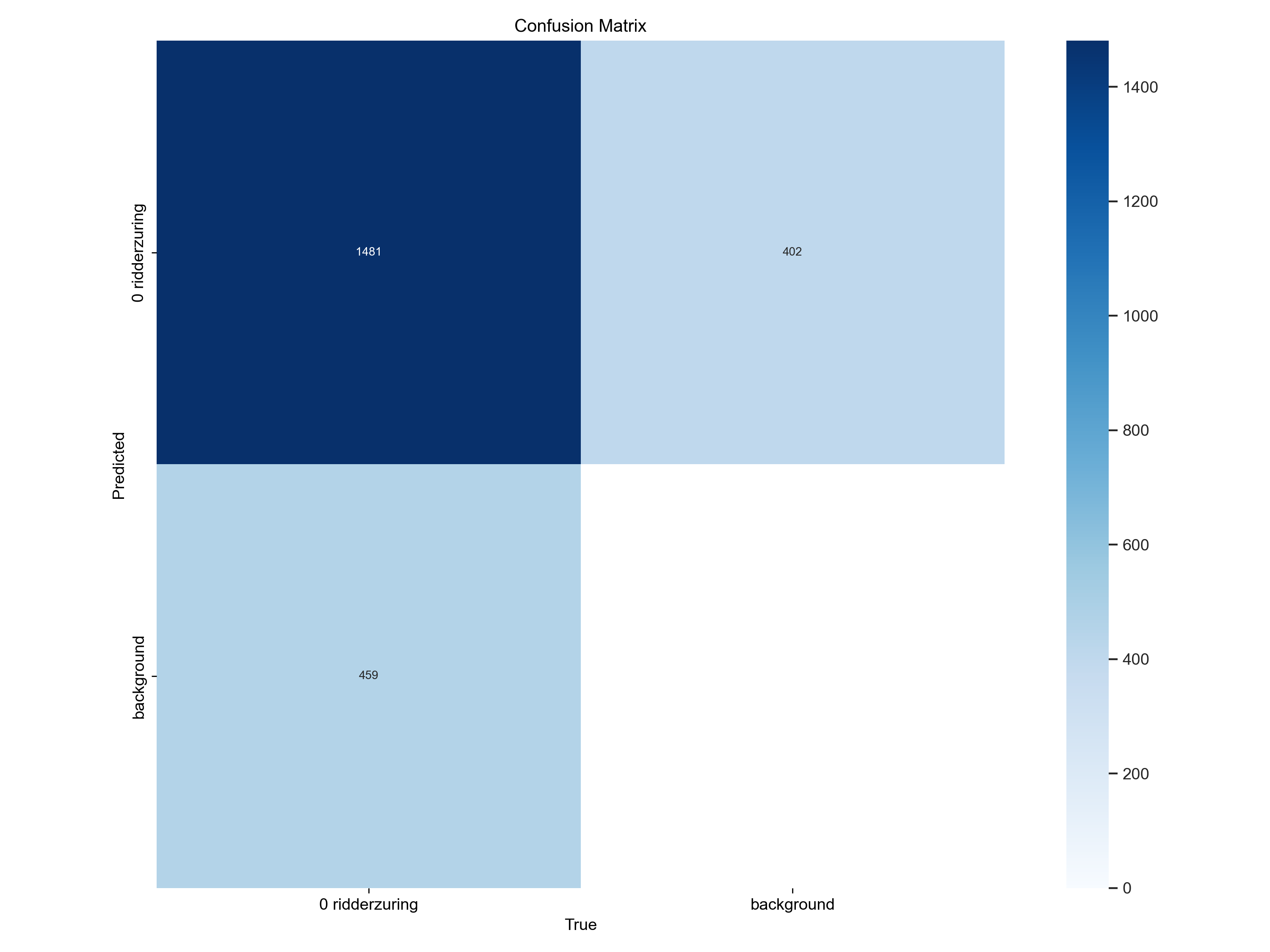
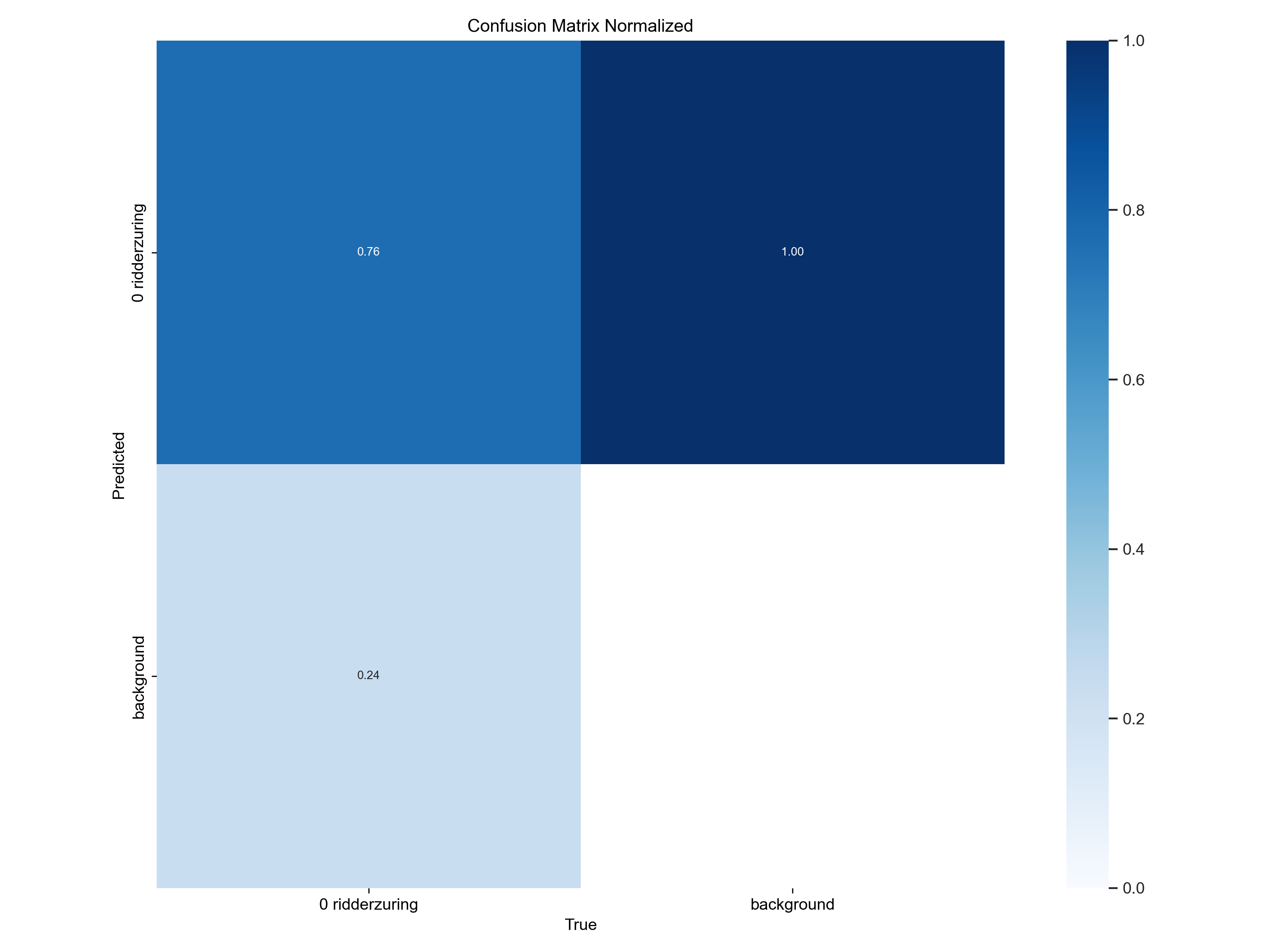
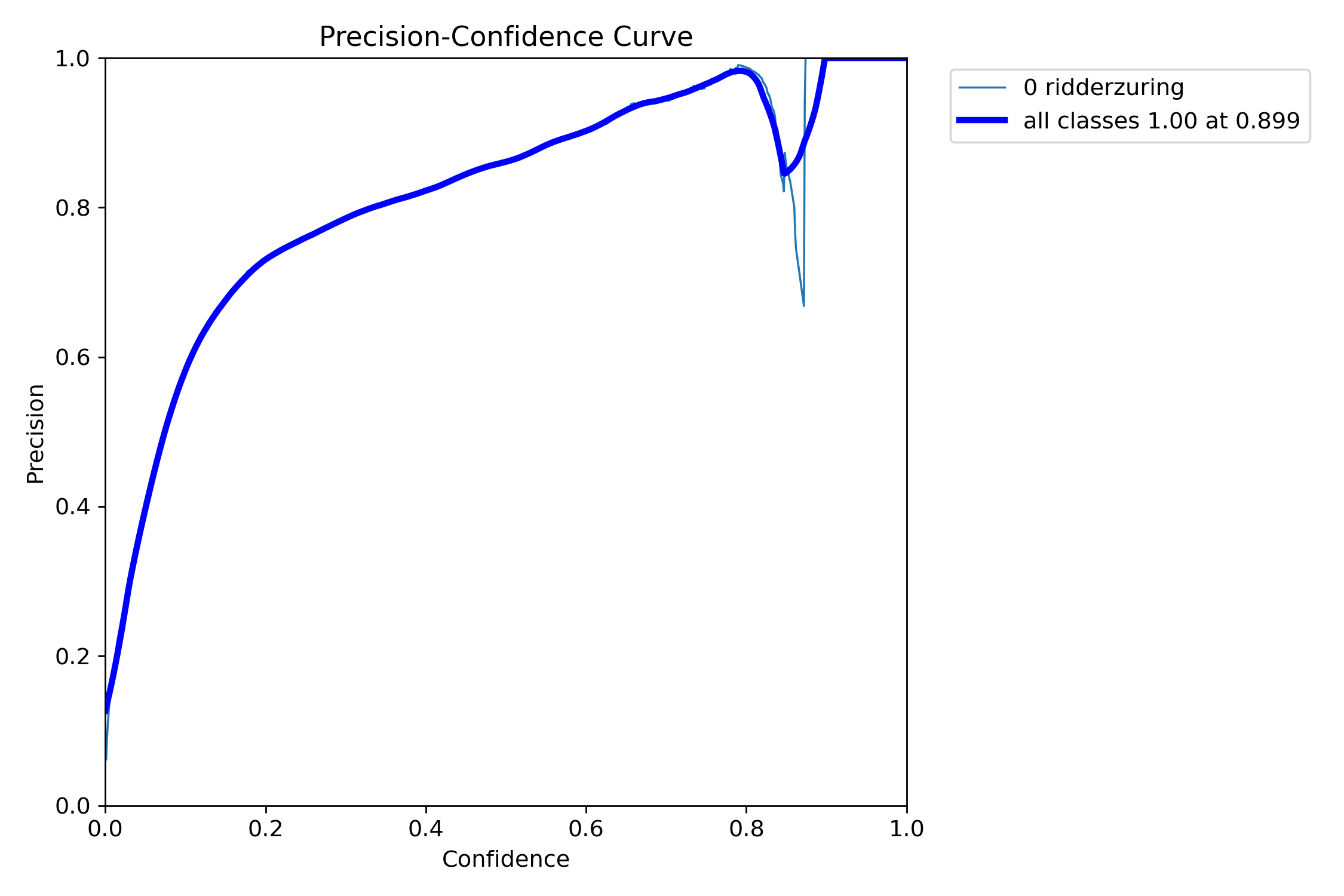
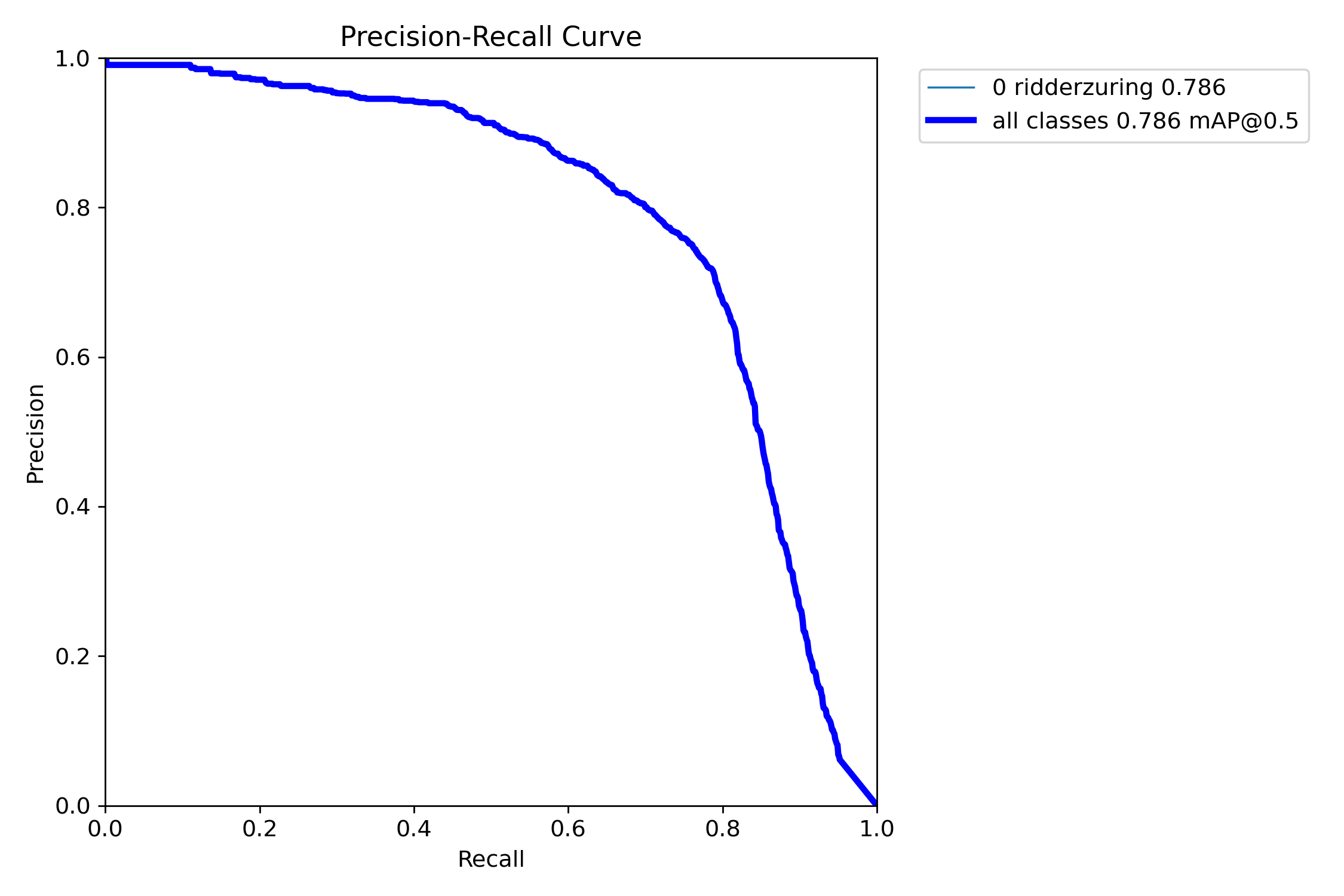
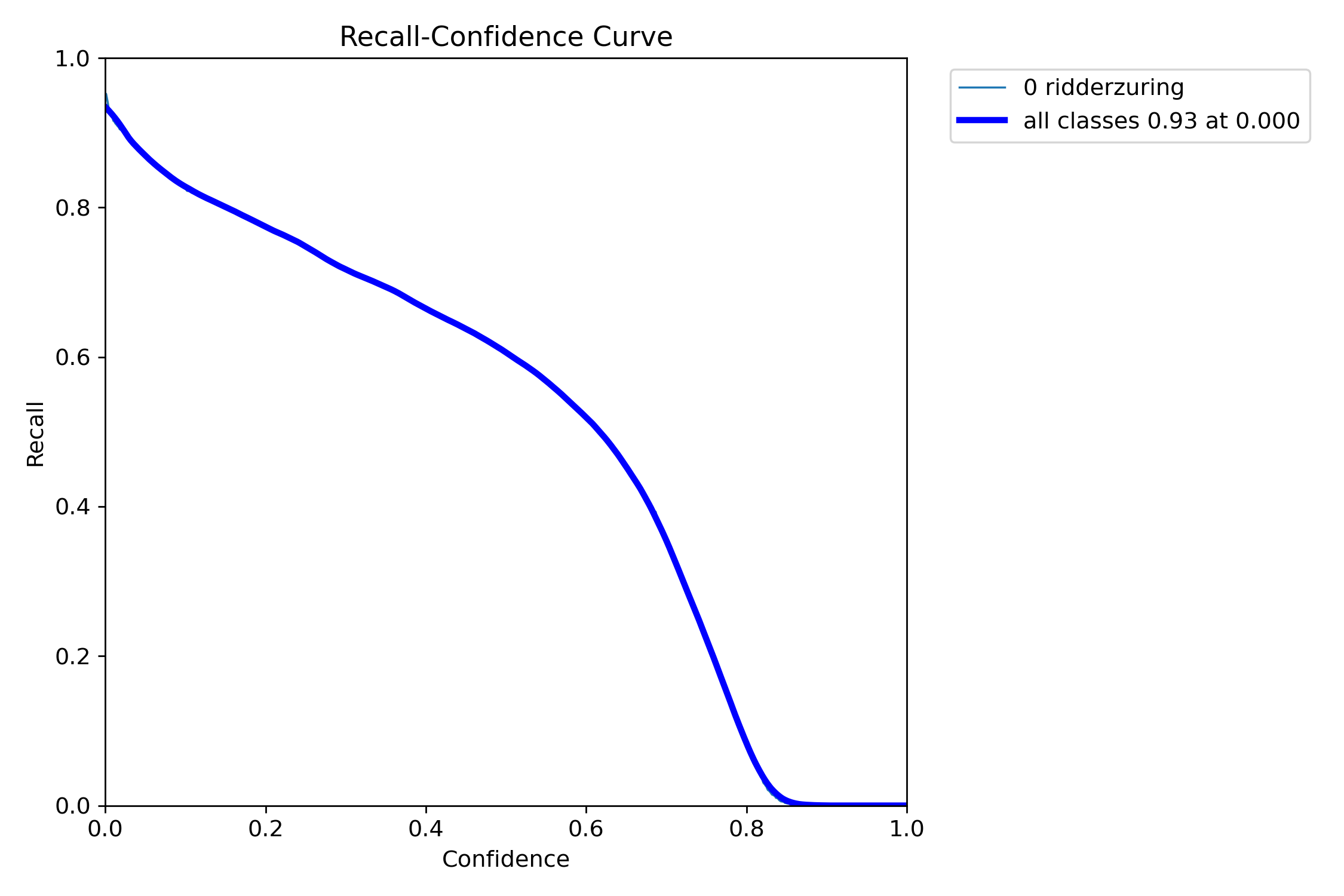
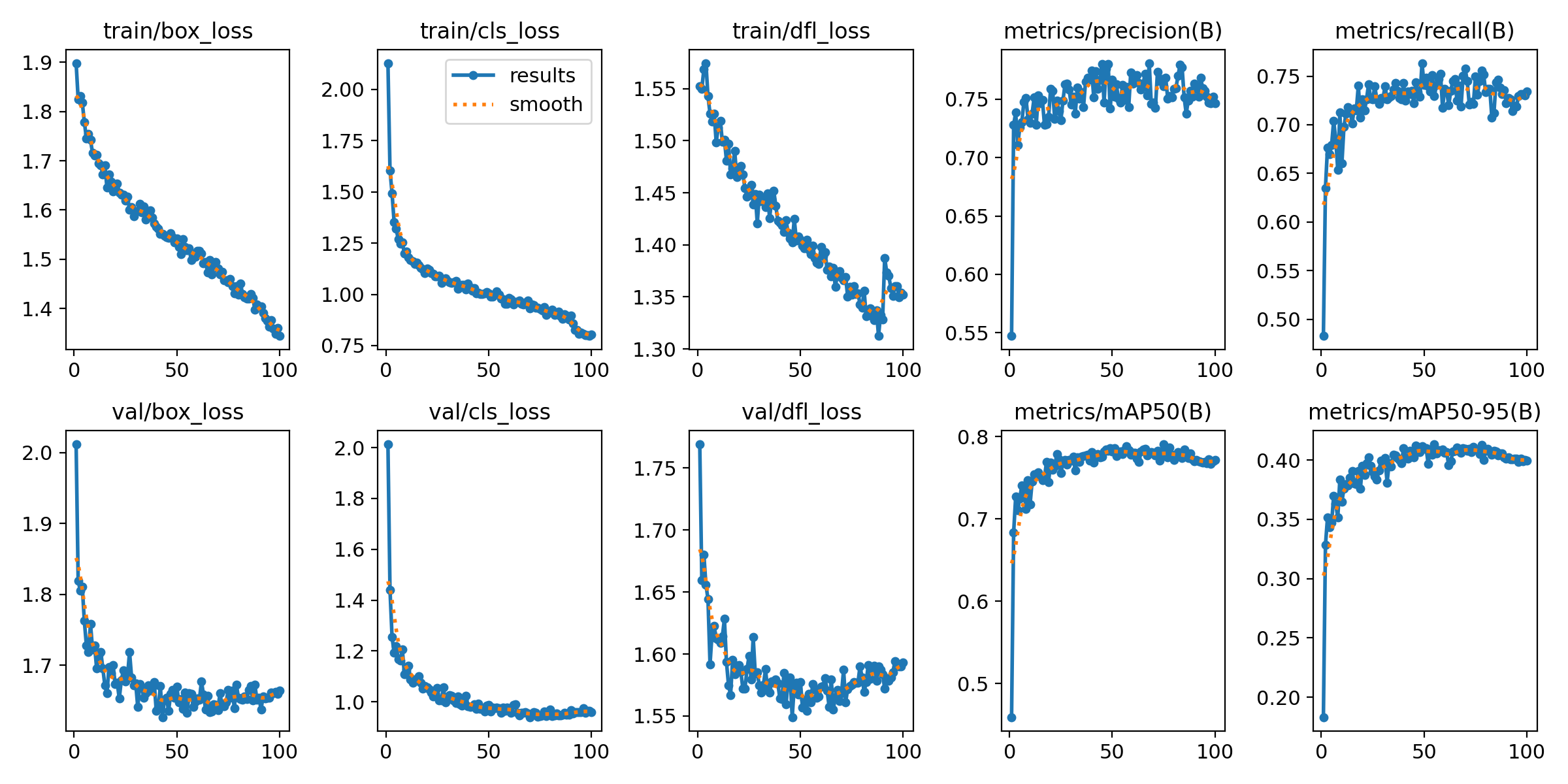
本研究旨在利用YOLOv8目标检测算法构建针对田间杂草——酸模叶蓼(Ridderzuring)的自动检测系统。数据集共包含2,486张标注图像,分为训练集1,661张、验证集580张和测试集245张,类别设为单类(ridderzuring)。通过对训练过程中的损失曲线、混淆矩阵、精确率-召回率曲线及标注分布等多维度指标的分析,评估模型的检测性能。
目录
功能模块
✅ 用户登录注册:支持密码检测,密码加密。
注册
登录
✅ 图片检测:可对图片进行检测,返回检测框及类别信息。
✅参数实时调节(置信度和IoU阈值)
✅ 视频检测:支持视频文件输入,检测视频中每一帧的情况。
✅ 摄像头实时检测:连接USB 摄像头,实现实时监测。
✅日志记录:日志标签页记录操作和错误信息,带时间戳
✅结果保存模块:支持图片/视频/摄像头检测结果保存
1、用户管理模块
| 功能 | 描述 |
|---|---|
| 用户注册 | 用户名、密码、确认密码、邮箱(选填)注册,密码SHA256加密存储 |
| 用户登录 | 用户名密码验证,自动跳转主界面 |
| 用户数据存储 | JSON文件存储用户信息(密码加密、注册时间、邮箱) |
| 登录状态 | 主界面显示当前登录用户名 |
2、界面与交互模块
| 功能 | 描述 |
|---|---|
| 玻璃效果界面 | 半透明毛玻璃背景,圆角边框,现代化视觉风格 |
| 无边框窗口 | 自定义标题栏,支持窗口拖动、最小化、最大化、关闭 |
| 响应式布局 | 主窗口三栏布局(左侧控制区、中央显示区、右侧信息区) |
| 状态栏 | 显示设备信息、模型状态、当前用户、实时时间 |
3、检测源管理模块
| 功能 | 描述 |
|---|---|
| 图片检测 | 支持JPG/JPEG/PNG/BMP格式图片载入 |
| 视频检测 | 支持MP4/AVI/MOV/MKV格式视频载入 |
| 摄像头检测 | 实时调用摄像头(默认ID 0)进行检测 |
| 检测源切换 | 下拉菜单切换三种检测模式,自动更新界面状态 |
4、检测参数配置模块
| 功能 | 描述 |
|---|---|
| 置信度阈值 | 滑动条调节(0-100%,步长1%),实时显示当前值 |
| IoU阈值 | 滑动条调节(0-100%,步长1%),实时显示当前值 |
| 类别选择 | 动态生成检测类别复选框,支持全选/取消全选 |
| 参数同步 | 参数实时同步到检测器核心 |
5、YOLO检测核心模块
| 功能 | 描述 |
|---|---|
| 模型加载 | 加载best.pt模型文件,自动检测GPU可用性,支持CPU/GPU切换 |
| 多模式检测 | 图片检测、视频检测、摄像头实时检测 |
| 检测线程 | 基于QThread的多线程处理,避免界面卡顿 |
| 检测结果 | 返回目标类别、置信度、边界框坐标 |
| FPS计算 | 实时计算处理帧率 |
| 进度反馈 | 视频处理进度条实时更新 |
6、结果显示模块
| 功能 | 描述 |
|---|---|
| 实时画面 | 中央区域显示检测结果图像(带标注框) |
| 统计信息 | 检测状态、目标数量、FPS、处理帧数实时更新 |
| 检测列表 | 右侧列表显示当前帧所有检测到的目标(类别+置信度) |
| 日志记录 | 日志标签页记录操作和错误信息,带时间戳 |
| 占位显示 | 未选择检测源时显示系统LOGO和提示文字 |
7、结果保存模块
| 功能 | 描述 |
|---|---|
| 保存开关 | 复选框控制是否保存检测结果 |
| 路径选择 | 自定义保存路径,支持图片/视频格式自动识别 |
| 自动命名 | 保存文件自动添加时间戳(detection_result_20240101_120000.jpg) |
| 视频保存 | 支持检测结果视频录制(MP4格式) |
| 手动保存 | 工具栏保存按钮可随时保存当前画面 |
| 保存反馈 | 保存成功弹窗提示,日志记录保存路径 |
8、工具栏功能
| 功能 | 描述 |
|---|---|
| 图片按钮 | 快速切换到图片检测模式并打开文件选择器 |
| 视频按钮 | 快速切换到视频检测模式并打开文件选择器 |
| 摄像头按钮 | 快速切换到摄像头检测模式 |
| 保存按钮 | 手动保存当前显示画面 |
9、辅助功能
| 功能 | 描述 |
|---|---|
| 错误处理 | 统一错误弹窗提示,日志记录错误详情 |
| 资源清理 | 检测停止时自动释放摄像头、视频文件、视频写入器资源 |
| 时间显示 | 状态栏实时显示系统时间 |
| 模型状态 | 状态栏显示模型加载状态和当前设备(CPU/GPU) |
10、数据校验模块
| 功能 | 描述 |
|---|---|
| 注册验证 | 用户名长度≥3,密码长度≥6,密码一致性检查,邮箱格式验证 |
| 协议确认 | 注册前需勾选同意用户协议 |
| 文件校验 | 模型文件存在性检查,文件大小验证(≥6MB) |
| 输入非空 | 登录/注册时必填项非空检查 |
引言
随着精准农业的快速发展,基于计算机视觉的杂草自动检测技术已成为减少除草剂使用、降低人力成本的重要手段。传统杂草控制依赖人工巡查或大面积喷洒农药,不仅效率低下,而且对环境造成较大压力。近年来,基于深度学习的目标检测算法,尤其是YOLO系列模型,因其检测速度快、精度高、易于部署等优势,在农业视觉任务中得到了广泛应用。
本课题选择YOLOv8作为核心检测框架,针对酸模叶蓼这种常见且具有较强竞争性的田间杂草,构建专用的检测系统。通过对采集的2,486张图像进行标注、训练和评估,期望实现对该杂草的高效识别与定位。然而,在模型评估过程中发现训练结果异常,检测性能远未达到预期。本报告旨在系统性地分析这些异常现象,诊断问题根源,并为后续的数据修复与模型优化提供明确方向。
背景
在现代化农业生产中,杂草与作物之间的资源竞争是导致作物减产的重要因素之一。酸模叶蓼(Ridderzuring)作为一种广泛分布于农田、菜地及果园的恶性杂草,具有生长速度快、繁殖能力强、根系发达等特点。它能够通过释放化感物质抑制周围作物的生长,同时还是多种病虫害的中间寄主,严重威胁农作物的产量与品质。传统的人工拔除或机械除草方式耗费大量劳动力,且难以在大规模农田中及时、全面实施。化学除草虽然效率较高,但长期、大量使用除草剂不仅增加了农业成本,也带来了土壤污染、水体富营养化及杂草抗药性增强等一系列生态环境问题。
基于深度学习的精准杂草检测技术为上述困境提供了新的解决思路。通过部署在无人机、地面机器人或智能喷雾设备上的视觉系统,可以实时识别田间杂草的种类和位置,进而实现定点、定量施药或机械清除,显著降低除草剂用量和人力投入。YOLOv8作为当前YOLO系列中最先进的版本之一,在COCO等通用数据集上表现出优异的检测性能,其Anchor-Free设计、更优的损失函数和可扩展的网络结构使其特别适合农业场景中小目标、密集分布的检测任务。
然而,目标检测模型的性能高度依赖于高质量的数据集和正确的标注信息。标注坐标的规范性、类别分布的平衡性以及训练参数的合理性都会直接影响最终模型的收敛效果和检测精度。在实际开发过程中,数据标注错误、标签格式不匹配、训练配置不当等问题时有发生,导致模型无法有效学习目标的视觉特征。因此,在开展模型训练之前,必须对数据集进行全面检查与预处理,确保标注文件格式正确(如YOLO格式要求坐标归一化且位于[0,1]区间)、目标框与图像内容一致、类别分布合理,并采用适当的数据增强策略以提升模型的泛化能力。本系统在初步训练过程中暴露出的性能瓶颈,正是一个典型的因数据集问题导致训练失败的案例,值得深入剖析与总结。
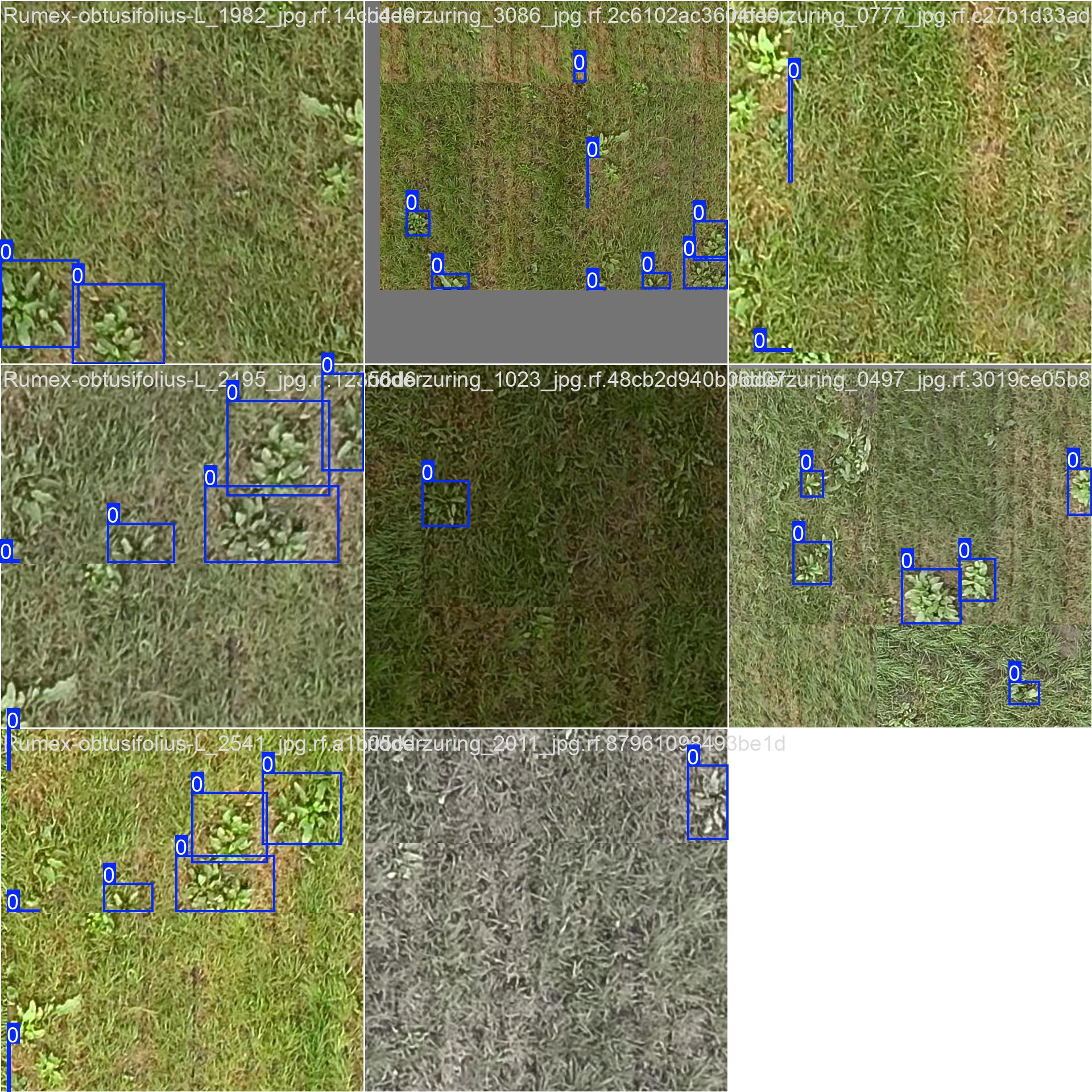
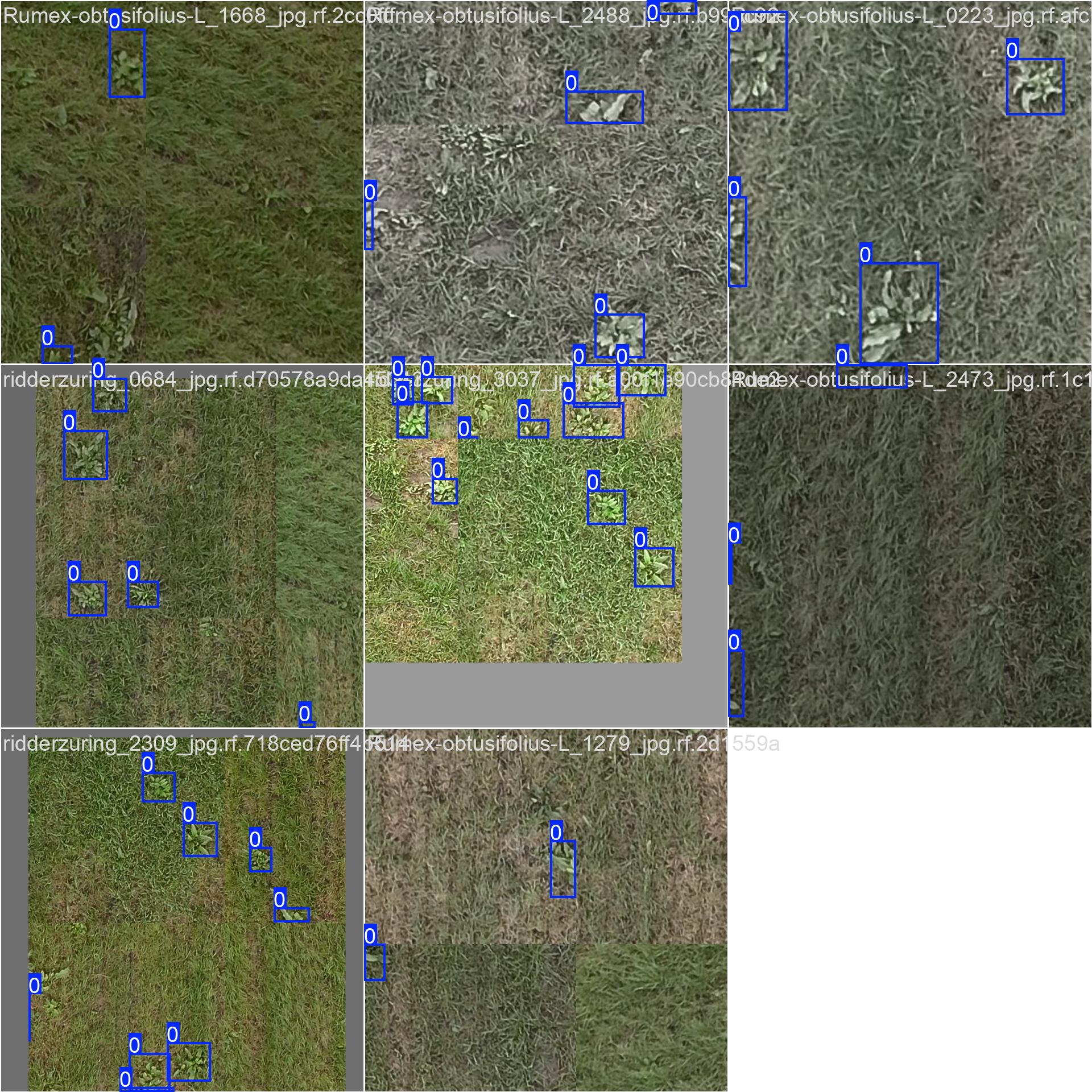
数据集介绍
本实验使用的数据集为自建的酸模叶蓼(Ridderzuring)单类杂草检测数据集。
数据集具体划分为:
-
训练集:1,661张(约占总数的66.8%)
-
验证集:580张(约占总数的23.3%)
-
测试集:245张(约占总数的9.9%)
类别信息:
-
类别数量:1类
-
类别名称:
['0 ridderzuring'](酸模叶蓼)
标注坐标理论范围:x_center, y_center, width, height 均应归一化在 [0, 1] 区间内。
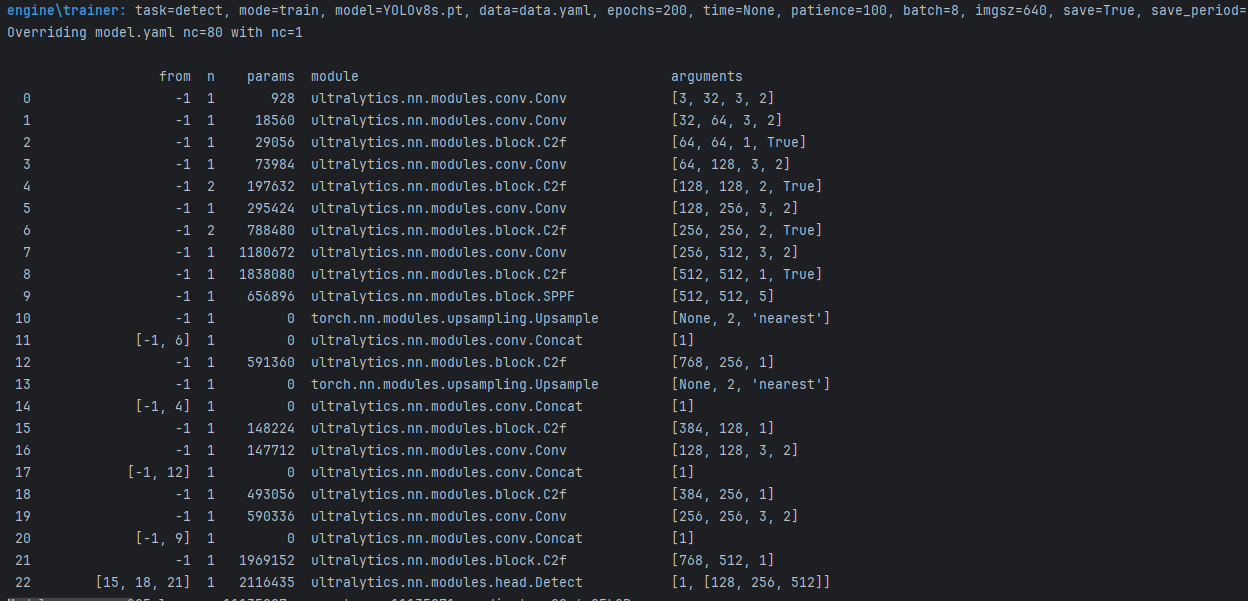
训练过程
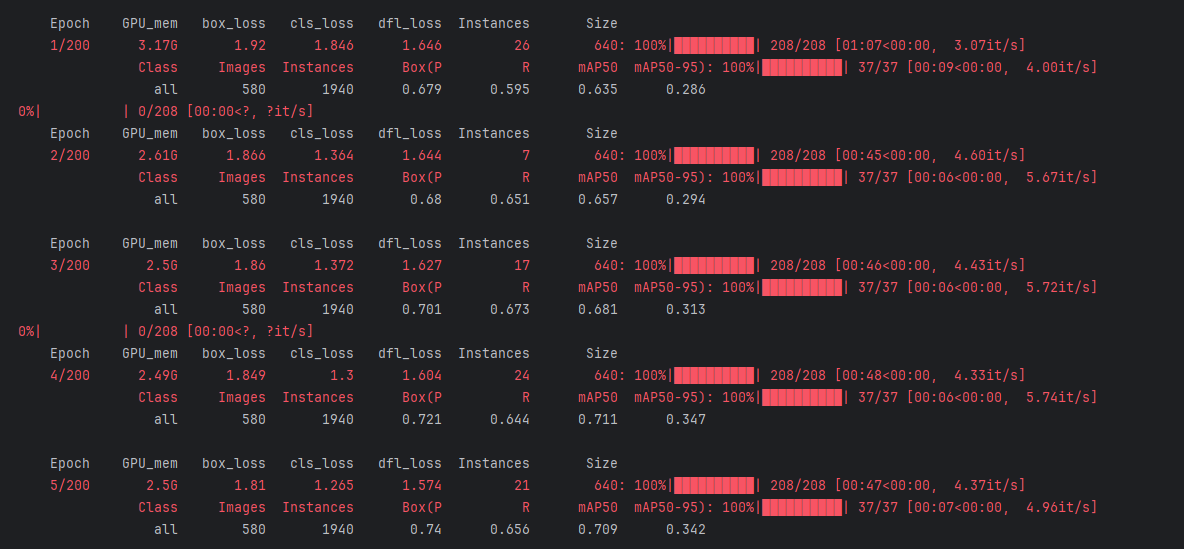
训练结果


常用标注工具
假设您现在准备好进行标注。有几种开源工具可以帮助简化数据标注流程。以下是一些有用的开放标注工具:
Label Studio:一个灵活的工具,支持各种标注任务,并包含用于管理项目和质量控制的功能。 CVAT:一个强大的工具,支持各种标注格式和可定制的工作流程,使其适用于复杂的项目。 Labelme:一个简单易用的工具,可以快速标注带有多边形的图像,非常适合简单的任务。 LabelImg: 一款易于使用的图形图像标注工具,特别适合以 YOLO 格式创建边界框标注。
这些开源工具经济实惠,并提供一系列功能来满足不同的标注需求。
界面核心代码:

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐
 3
3 0
0- 0



 已为社区贡献271条内容
已为社区贡献271条内容

所有评论(0)