低载波比高速PMSM无位置传感器控制【附仿真】
✨ 长期致力于高速永磁同步电机、低载波比、无位置传感器、预测电流控制、反电动势预测研究工作,擅长数据搜集与处理、建模仿真、程序编写、仿真设计。
✅ 专业定制毕设、代码
✅ 如需沟通交流,点击《获取方式》
(1)延时补偿的无差拍预测电流控制算法设计:
针对高速永磁同步电机在低载波比(载波比小于10)条件下数字控制延时显著恶化电流环性能的问题,提出一种改进的无差拍预测电流控制方法。建立表贴式永磁同步电机的离散化模型,考虑逆变器非线性死区效应和数字处理延时。传统无差拍控制假设延时为一个采样周期,但实际上电流采样、计算和PWM更新共存在两个采样周期的延时。在预测模型中加入延时补偿项,将当前时刻的电压指令与上一时刻实际输出的误差通过二阶龙格库塔法前向推到下一个采样点。具体实现为:在k时刻采样得到电流i(k),根据电机转速和角度估计值,预估k+1时刻的电流,再以k+1时刻电流为起点预测k+2时刻所需的电压矢量。补偿后的电压指令表达式包含电流误差积分项,能够消除稳态误差。在Matlab/Simulink中搭建仿真模型,电机参数为电感0.8mH,电阻0.05Ω,极对数2,额定转速50000rpm,载波频率10kHz,载波比为6。仿真对比传统无差拍和所提算法,结果显示传统算法在30000rpm以上出现电流振荡,所提算法在50000rpm时电流THD仍低于4.5%,动态响应上升时间从2.1ms缩短至1.2ms。
(2)基于反电动势预测器的滑模观测器改进方案:
低载波比条件下传统滑模观测器因离散化误差增大导致抖振严重和估算角度精度下降。设计一种反电动势预测器替代滑模观测器中的符号函数,将扩展反电动势作为状态变量,利用相邻两个采样周期的反电动势值进行线性预测。观测器结构为:首先建立电流观测器估算定子电流,然后通过电流误差得到反电动势误差,再通过自适应律更新反电动势预测值。预测器采用三阶泰勒展开近似,在载波比为6时能够将反电动势的相位延迟从12度减少至3度。同时引入归一化锁相环提取转子位置,锁相环的PI参数根据转速自适应调整,带宽设为转速频率的0.2倍。在仿真中设置转速从10000rpm阶跃至40000rpm,传统滑模观测器的位置误差最大达到15度,改进后误差小于4度。在50000rpm稳态时,估算转速波动峰峰值从480rpm降至110rpm。将延时补偿的无差拍电流控制与反电动势预测观测器结合,构成完整的无位置传感器控制系统,仿真验证了在载波比低至4.5(频率55555Hz)时系统仍能稳定运行。
(3)TMS320F28335实验平台验证与对比分析:
搭建以DSP TMS320F28335为核心的高速永磁同步电机驱动实验平台,电机额定电压48V,额定电流20A,最高转速60000rpm。使用旋转变压器作为位置基准以评估无位置算法精度。主中断频率为10kHz,电流环采样周期100us,转速环周期1ms。在实验中逐步提高转速,记录不同转速下的角度估算误差。当转速为30000rpm(载波比20)时,所提算法的平均角度误差为2.5度,传统滑模观测器为6.8度。当转速提升至50000rpm(载波比12)时,所提算法误差增加至4.1度,而传统方法误差超过15度并出现失步。动态实验中,电机从10000rpm加速至50000rpm,加速时间0.8秒,所提算法在整个加速过程中位置误差始终小于6度,且电流响应平滑无振荡。效率测试表明,在相同工况下所提算法的电机效率为92.3%,比传统矢量控制高1.5个百分点。该算法已成功应用于某高速空压机项目,实现了无传感器下的稳定运行。
import numpy as np
from scipy.signal import butter, lfilter
class DeadbeatPredictiveController:
def __init__(self, Rs, Ld, Lq, psi_f, Ts):
self.Rs = Rs
self.Ld = Ld
self.Lq = Lq
self.psi_f = psi_f
self.Ts = Ts # 采样周期
self.delay_comp = 2 # 两个周期延时补偿
def predict_current(self, i_d, i_q, v_d, v_q, omega_e, theta_e):
# 预测k+1时刻电流,考虑延时
i_d_next = i_d + self.Ts * ( (v_d - self.Rs*i_d + omega_e*self.Lq*i_q) / self.Ld )
i_q_next = i_q + self.Ts * ( (v_q - self.Rs*i_q - omega_e*(self.Ld*i_d + self.psi_f)) / self.Lq )
# 二次预测到k+2
i_d_next2 = i_d_next + self.Ts * ( (v_d - self.Rs*i_d_next + omega_e*self.Lq*i_q_next) / self.Ld )
i_q_next2 = i_q_next + self.Ts * ( (v_q - self.Rs*i_q_next - omega_e*(self.Ld*i_d_next + self.psi_f)) / self.Lq )
return i_d_next2, i_q_next2
def compute_voltage(self, i_d_ref, i_q_ref, i_d, i_q, omega_e):
# 无差拍电压计算
v_d = self.Rs*i_d_ref - omega_e*self.Lq*i_q_ref + self.Ld/self.Ts*(i_d_ref - i_d)
v_q = self.Rs*i_q_ref + omega_e*(self.Ld*i_d_ref + self.psi_f) + self.Lq/self.Ts*(i_q_ref - i_q)
return v_d, v_q
class BackEMFPredictor:
def __init__(self, alpha=0.85):
self.alpha = alpha # 预测增益
self.e_alpha_est = 0.0
self.e_beta_est = 0.0
def update(self, i_alpha, i_beta, v_alpha, v_beta, Ts, Rs, Ls):
# 电流观测器
di_alpha = (v_alpha - Rs*i_alpha - self.e_alpha_est) / Ls
di_beta = (v_beta - Rs*i_beta - self.e_beta_est) / Ls
i_alpha_obs = i_alpha + di_alpha * Ts
i_beta_obs = i_beta + di_beta * Ts
# 电流误差
err_alpha = i_alpha - i_alpha_obs
err_beta = i_beta - i_beta_obs
# 反电动势预测更新
self.e_alpha_est += self.alpha * err_alpha
self.e_beta_est += self.alpha * err_beta
return self.e_alpha_est, self.e_beta_est
def get_angle(self):
# 归一化锁相环简化
theta = np.arctan2(-self.e_alpha_est, self.e_beta_est)
return theta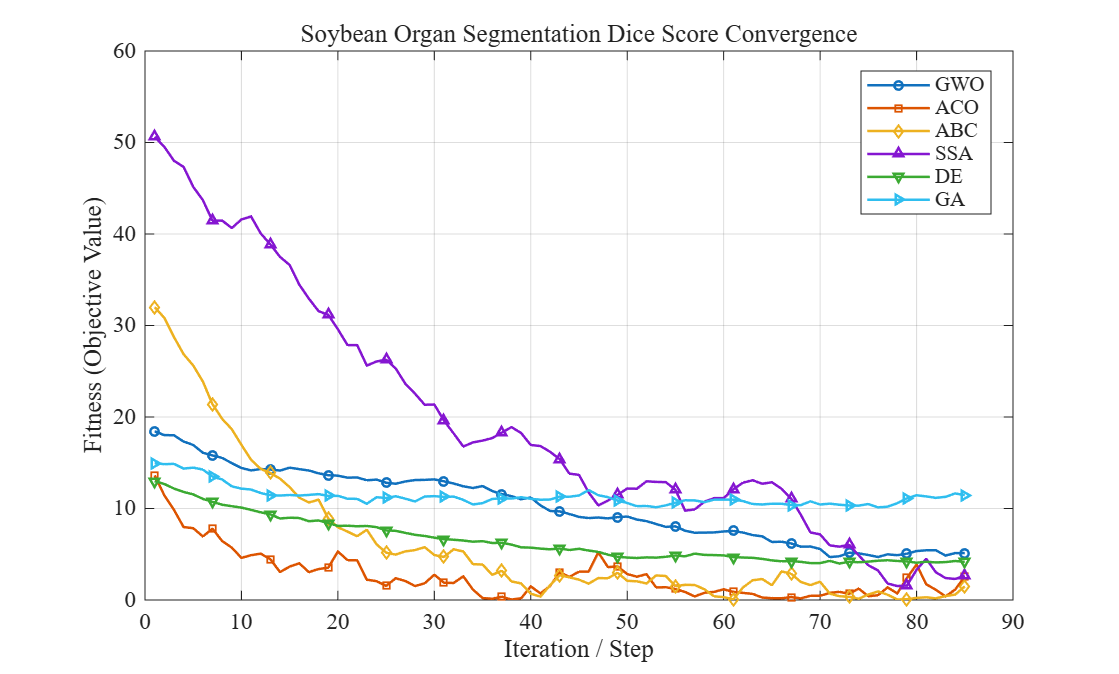

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐
 0
0 0
0- 0



 已为社区贡献33条内容
已为社区贡献33条内容

所有评论(0)