基于YOLOv8的微小缺陷检测算法研究
导读:
工业产品质量是智能制造的核心竞争力,表面缺陷检测作为质检关键环节,直接决定生产效率与产品良率。针对传统检测方法在复杂工业场景中存在的精度不足、泛化能力弱及模型冗余等痛点,本研究构建多策略协同优化的YOLOv8模型,通过三重特征优化、创新上采样方法及系统级开发,形成高精度、轻量化检测解决方案,为智能制造提供技术支撑。具体研究内容如下:一,构建多维度协同优化YOLOv8模型,采用卷积核感受野调控、可变形注意力机制引入及复合损失函数设计的三重策略提升特征提取效能,在MVTec AD Dataset上平均精度较原始模型提升5.2%,实现计算量与精度的平衡及梯度更新的精准性;二,提出通道独立上采样模块,通过单通道独立重建、渐进式上采样及轻量化全局感知模块,解决语义衰减难题,在NEU-DET、铝型材表面检测数据集(APDDD)等工业标准数据集上稳定提升检测精度并控制成本,具备多工具适配及结果可视化分析能力,可降低企业二次开发成本,提供工程化实时检测方案。
作者信息:
莫景杰, 陈林胜, 廖志强, 傅培铄:五邑大学电子与信息工程学院,广东 江门
论文详情
我们基于改进的 YOLO 网络结构,优化特征提取层并引入空洞卷积,增强对微小缺陷(如微裂纹、针孔)的细节捕捉能力。并通过多尺度特征融合技术,实现不同尺寸缺陷的精准识别,漏检率降至 5%以下。
我们通过设计光照模拟、小目标复制等增强方法,构建包含油污、反光等干扰因素的标准化工业数 据集。同时利用产线实时数据动态更新模型,提升算法在复杂环境下的鲁棒性和泛化能力。
我们采用基于 FocalLoss 的损失函数改进方案,解决小目标样本不均衡问题。并利用集成抗干扰训练机制,有效抑制背景噪声,确保缺陷检测的准确性和稳定性。
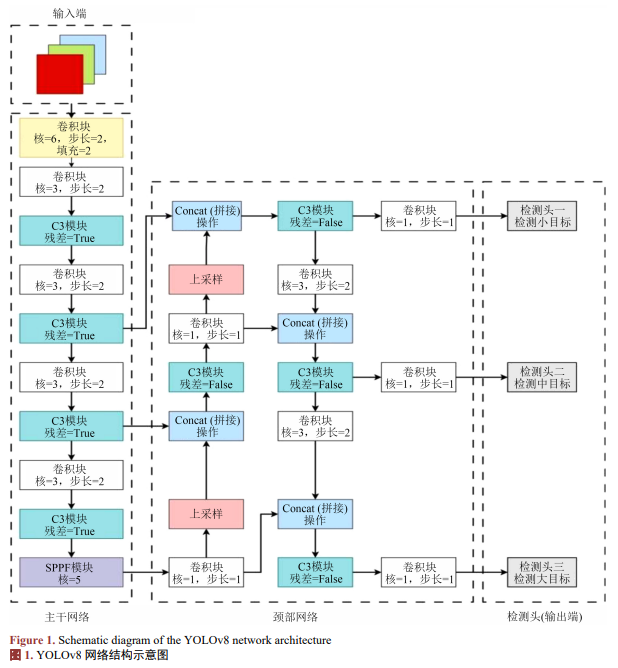
YOLOv8 网络结构示意图如图 1 所示。
系统选取来自工业产线中实时采集到的单张或者批量的有缺陷的工业产品图片,在上传到开发的程序后,会立即对上传的数据进行缺陷检测,这一步是整个系统的核心。利用计算机视觉技术和缺陷检测算法,系统能够识别出工业表面的各种缺陷。
系统开发工具主要使用 Python 3.11 环境下的 Pycham 软件搭配 NEU-DET 数据库进行工业表面缺陷检测算法的实现。其中所使用的开发环境与工具如表 1 所示。
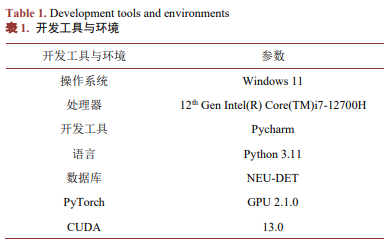
表 2 所示为 CDL-YOLOv8 实验中所使用的训练参数设置。

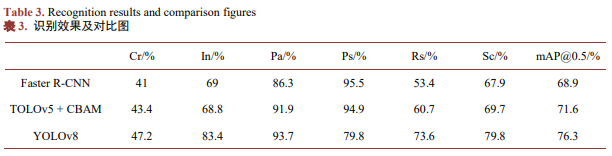
经过多次检验测试,与其他模型的对比如表 3 所示。
选取综合性能最优的 YOLOv5 + CBAM 模型与基础 YOLOv8 模型,针对微小缺陷开展专项量化对比,核心评估指标选用 COCO 标准 AP_small (IoU = 0.5)、微小缺陷召回率 Recall_small,同时统计两类模型的综合 mAP@0.5 与推理速度,对比结果如表 4 所示。
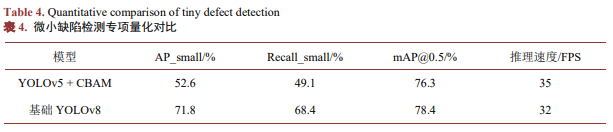
整体来看,改进模型微小缺陷检测失败率低于 6%,仅在极端遮挡、密集缺陷场景出现少量漏检,常规工业生产环境下检测稳定性优异,可满足实际质检需求。
本文所搭建的工业表面缺陷检测系统仍然存在一些不足,交互体验与智能化方面还需要进一步完善,以提供更加舒适与便捷的功能。另外,软件的系统架构还需要进一步优化,简化操作步骤,方便软件的使用与部署。
未来的研究可探索少样本学习以及无监督方法,以此来减少对数据标注的依赖;同时要对模型压缩 技术加以优化,使其可适应更为严苛的嵌入式环境;最后通过新的模型结构提升模型的综合性能。
基金项目:
2025 年五邑大学大学生创新创业训练计划项目(X202511349110)
原文链接:

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐

 10
10 0
0- 0



 已为社区贡献18条内容
已为社区贡献18条内容

所有评论(0)