伺服控制的负载转矩扰动观测器 (TL DOB) 简谈
·
一、电机转动方程
1.1 电机转动方程公式
- J = 转动惯量 (kg·m²)
- θ = 角位置 (rad)
= 弧度每秒 (rad/s)
= 位置的二阶导数角加速度 (rad/s²)
- Kt = 电机转矩常数 (N·m/A)
- iq = q 轴电流 (A)
- d = 未知扰动 (N·m)
描述的是电机轴的力学动态关系,本质上就是旋转形式的牛顿第二定律。
这条公式告诉我们,电机轴的角加速度 是由两部分力矩共同决定的:
- 电机自己产生的控制转矩
- 外部未知扰动 d (摩擦、负载、齿槽等)
用通俗话说:
- 想让电机快转 → 增大电流 iq
- 电机转动中遇到阻力 → 扰动 d 会减慢加速度 (比如 d 包含静摩擦,基本为常量;黏滞摩擦,它转速成正比)
因为等号左侧有是角位置的二阶导,所以这条公式也被称为:
- 电机 / 旋转机械的二阶动力学方程
1.2 电机扰动演示
伺服电机在运行时会受到各种未知干扰:
- 负载转矩 (搬东西)
- 摩擦力 (轴承、丝杆)
- 齿槽转矩 (电机结构固有)
- 重力 (垂直轴)
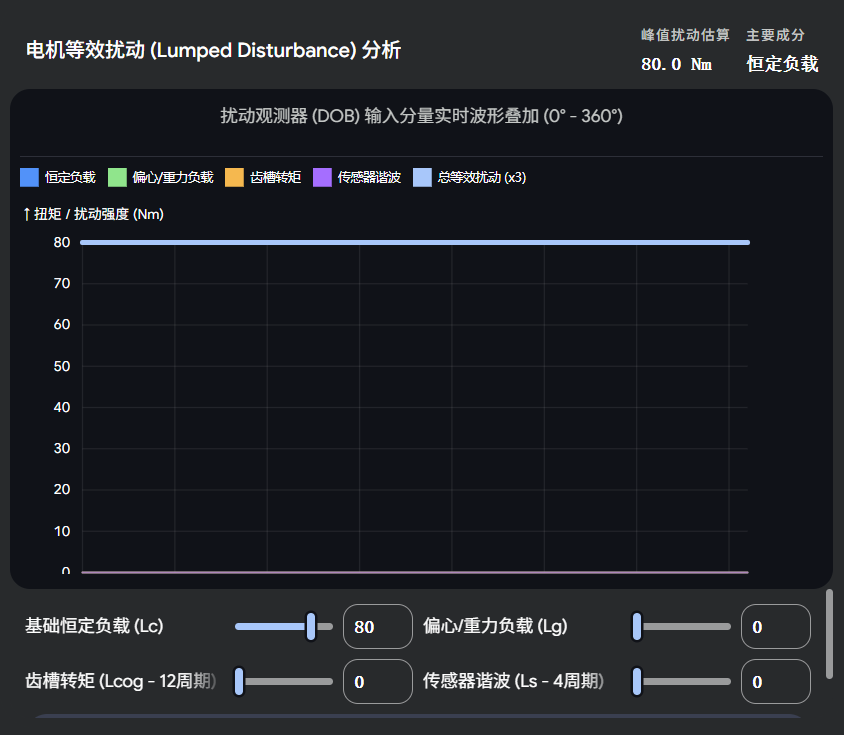
1.2.1 无扰动
恒定负载稳定输出在 80Nm:
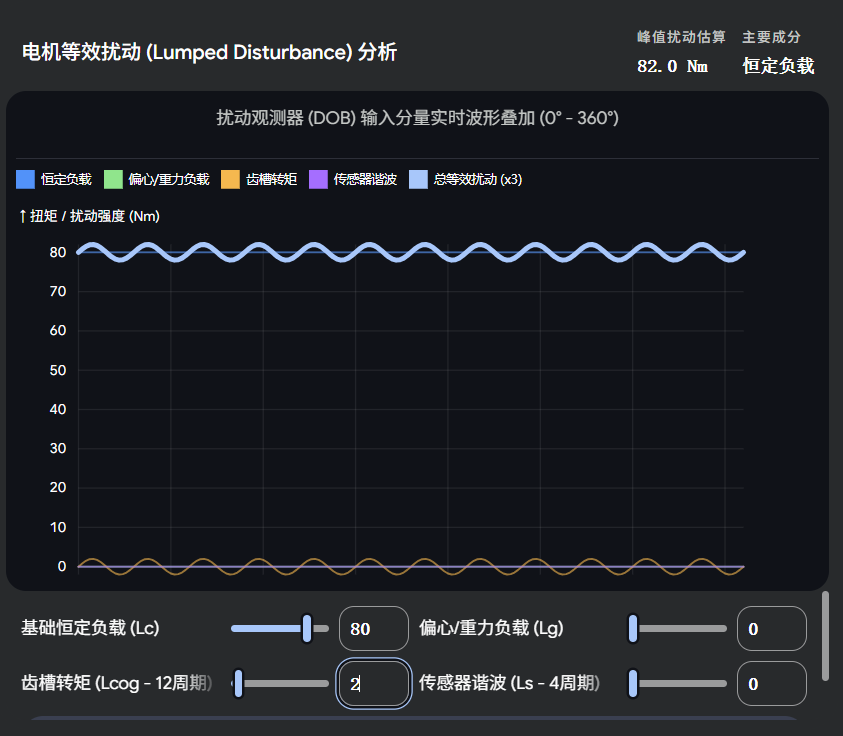
1.2.2 等效齿槽转矩
加入一定周期和幅值的齿槽转矩扭矩输出:
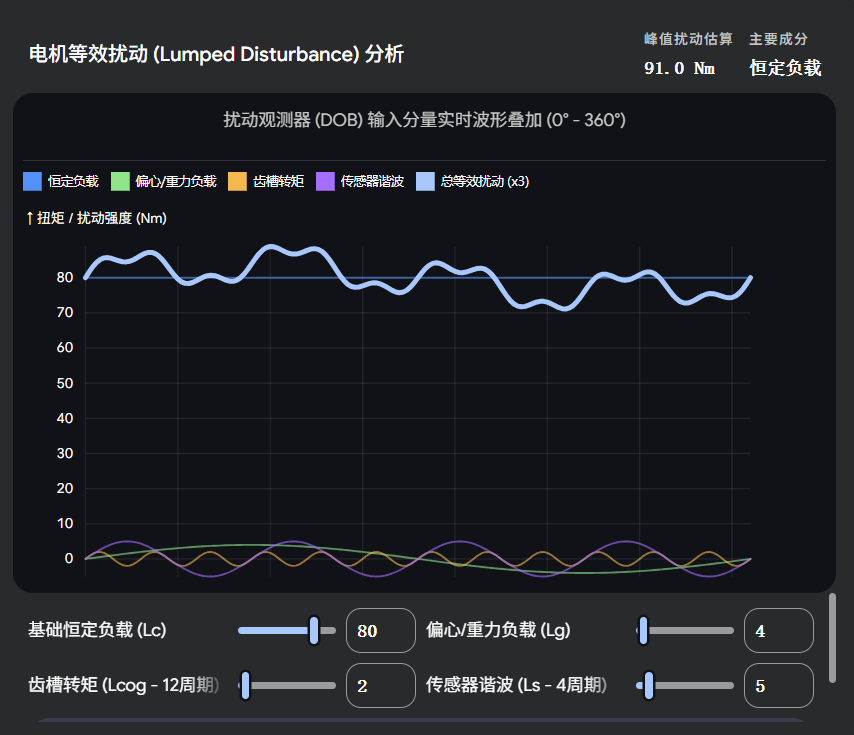
1.2.3 齿槽转矩、偏心/重力负载、传感谐波
多重转矩负载输出:
二、DOB 基本思路
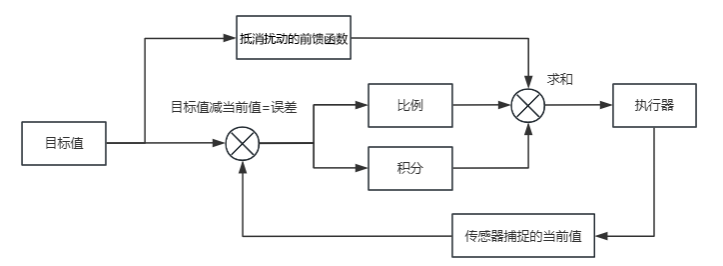
2.1 理想的控制策略
回顾电机转动方程公式公式,我们可以发现:
- 电机产生的净转矩 = 惯性引起的角加速度 + 外部扰动
= 惯性产生的转矩
= 控制产生的转矩
= 未知扰动 (齿槽转矩、传感器谐波、磁阻转矩波动等)
我们的目标是观测出未知扰动 d,其包括 (齿槽转矩、传感器谐波、磁阻转矩波动等),从而让系统抵消未知扰动,输出效果:
2.2 DOB 的基本思路
使用系统模型预测电机输出:
= 模型输出
我们用预测的输出减去实际的输出,就得到了预估的扰动 d:
= 预估的扰动
最后根据一些办法得到根据得到的扰动的周期规律,给 iq 输出做前馈控制抵消掉扰动。
除此之外,DOB 因为是前馈控制,对于突然变动的负载引起的转速 / 力矩突变也有较好的抑制效果。因为电流环 PI 的误差依赖积分,然而观测扰动却可以先于 PI 做前馈控制,从而在极端的情况下稳定住系统。
2.3 DOB 观测器概述
2.3.1 三阶观测器的状态空间模型
| 状态量 | 说明 |
| x1 | |
| x2 | |
| x3 | d (扰动) |
于是系统可以写成:
= 的导数,速度
= 加速
= 角度的二阶导数角加速度 (rad/s²)
- K = 电机转矩常数 (N·m/A)
- iq = q 轴电流 (A)
= 扰动
2.3.2 构造 x1、x2、x3 状态方程
2.3.2.1 状态方程 x3
= 当前的扰动值估计
= 观测增益系数
= 位移量观测误差
= 编码器位移量
= 编码器位移量预估
2.3.2.2 状态方程 x2
这个 x2 预估公式根据电机转动方程公式 变形得到。
= 当前速度估计
= 已知的电机控制增益,转矩系数除以转动惯量 (Kt/J)
= 控制输入指令,q 轴电流指令
2.3.2.1 状态方程 x1
位移量本质上就是速度,所以这里没有积分。
2.3.3 x1、x2、x3 的 ωo 的定义
因为 我们在 DOB 中使用的 ESO 是三阶系统,所以在上面公式中所使用的观测增益系数 系数不一样,其中三个状态有三个极点:
l1 = 3*w0;
l2 = 3*w0*w0;
l3 = w0*w0*w0;角度、速度和扰动分别越容易被积分和误差干扰,所以就越使用更大的增益。
2.4 代码演示
将连续的积分离散后的代码如下:
/*
参数名 含义 参数名 含义
pos_now_pulse 当前编码器累计脉冲值 iq_now_A 当前 q轴电流(A)
wn_Hz DOB观测器带宽(Hz) kt_j Kt/J(转矩常数 / 转动惯量)
dt 控制周期(s) enc_line_inv 编码器线数倒数
iq_max 最大允许电流(A) speed_max 最大允许速度(rad/s)
*/
void tl_dob_update(int64_t pos_now_pulse, float iq_now_A, float wn_Hz, float kt_j, float dt, float enc_line_inv, float iq_max, float speed_max)
{
// 1. 编码器脉冲差 -> 角位移
int64_t dp = pos_now_pulse - pos_last;
pos_last = pos_now_pulse;
float y = (float)dp * 2.0f * PI * enc_line_inv;
// 2. 观测器带宽
float w0 = 2.0f * PI * wn_Hz;
float l1 = 3.0f * w0;
float l2 = 3.0f * w0 * w0;
float l3 = w0 * w0 * w0;
// 3. 位置误差
float err = y - dob_x1;
// 4. 扰动观测 x3
float x3_max = iq_max * kt_j;
dob_x3 += l3 * err * dt;
dob_x3 = clampf(dob_x3, -x3_max, +x3_max);
// 5. 速度观测 x2
float acc_est = kt_j * iq_now_A + dob_x3 + l2 * err;
dob_x2 += acc_est * dt;
dob_x2 = clampf(dob_x2, -speed_max, +speed_max);
// 6. 下一拍位移预测 x1
dob_x1 = (dob_x2 + l1 * err) * dt;
dob_x1 = clampf(dob_x1, -PI, +PI);
// 7. 输出
ev_rad_s = dob_x2;
iq_com_A = dob_x3 / kt_j;
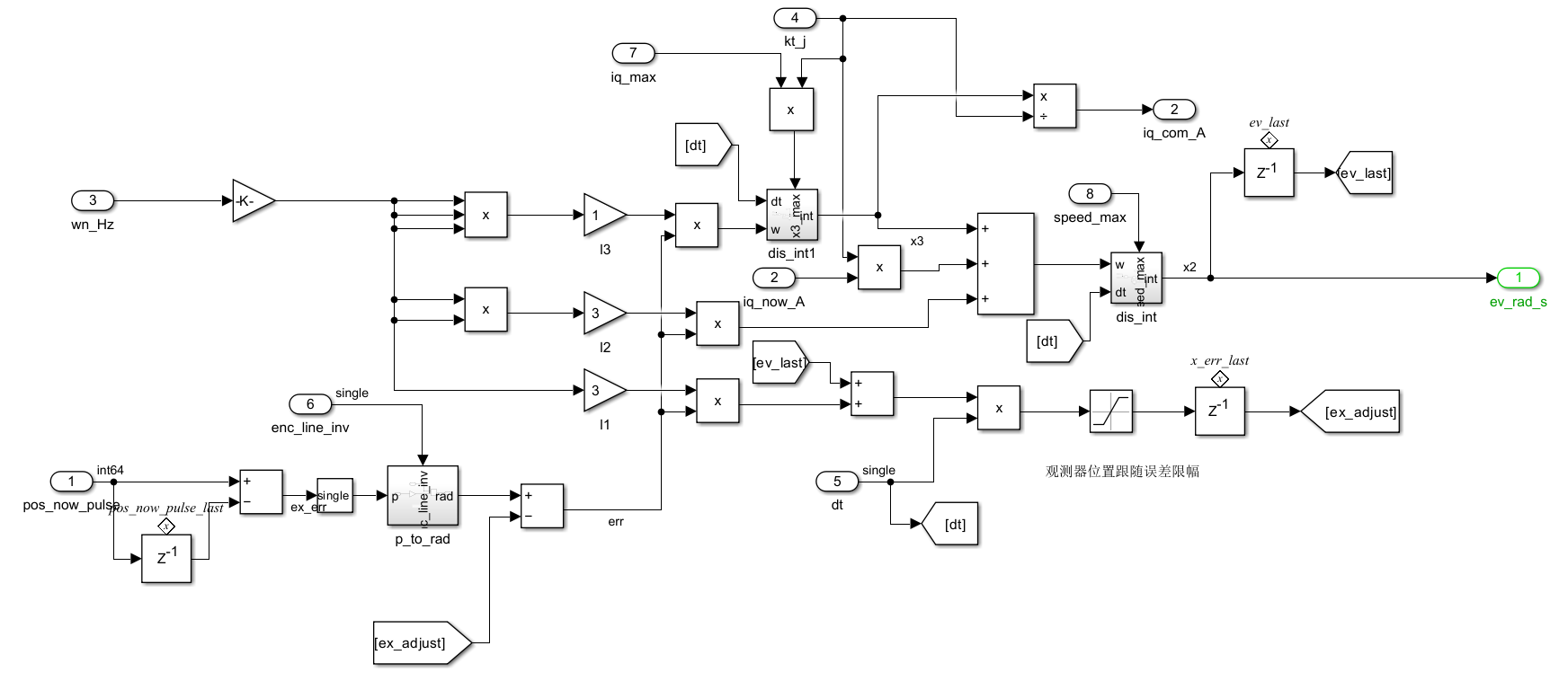
}2.4 Simulink 仿真解析

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐

 9
9 0
0- 0



 已为社区贡献7条内容
已为社区贡献7条内容

所有评论(0)