【无人机编队控制MATLAB程序5】多无人机分布式系统,协同路径规划与避碰,使用改进APF(人工势场法)。附下载链接
·
代码实现:动态环境下多无人机系统协同路径规划与自主避碰的完整仿真框架。针对5架无人机在三维空间中的协同飞行任务,采用改进人工势场法(APF)生成实时航迹,并通过引入速度障碍防撞思想增强无人机之间的碰撞避免能力,同时结合静态柱状障碍物和动态球形障碍物检验规划算法的鲁棒性。
原创代码,请勿翻卖
文章目录
背景介绍
关于动态环境、多无人机系统的协同路径规划与避碰防撞问题的MATLAB仿真,主要内容包括:
- 多无人机系统建模:建立无人机运动学与动力学模型,描述其在三维空间中的飞行特性;
- 动态环境感知:对环境中的静态障碍物(建筑物、山体等)和动态障碍物(移动目标、其他飞行器)进行实时感知与建模;
- 协同路径规划算法:基于改进人工势场法(APF)、A* 算法及强化学习方法,设计多无人机的全局与局部协同路径规划框架;
- 防撞策略设计:引入优先级碰撞检测机制与速度障碍(VO)模型,保障无人机间安全间距;
- 仿真验证:在 MATLAB/Simulink 平台上对算法进行仿真验证,评估其路径效率、防撞成功率与计算实时性。
研究具有重要的理论价值与工程意义,可为未来无人机集群自主飞行系统的设计提供理论支撑与算法参考。
运行结果
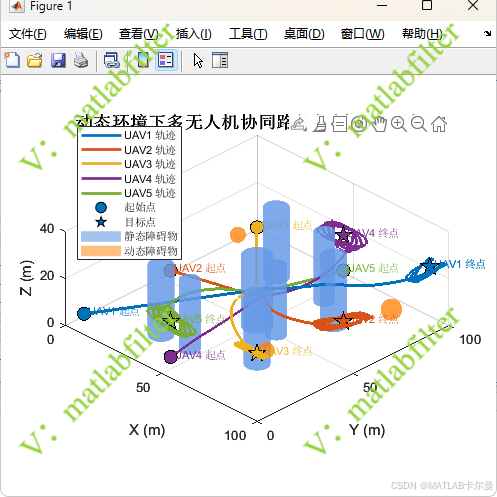
在 MATLAB 仿真环境中,以 5 架无人机在含有动态障碍物的三维场景下执行协同任务为例,运行结果如下:
运行结果图示(部分):
-
三维路径规划图:各无人机轨迹以不同颜色显示,清晰展现协同避障过程:
-
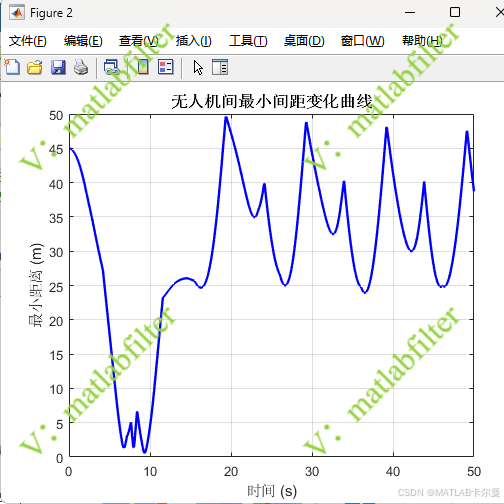
无人机间最小距离曲线:几乎全程保持在安全距离(5m)以上,验证防撞策略有效性:
-
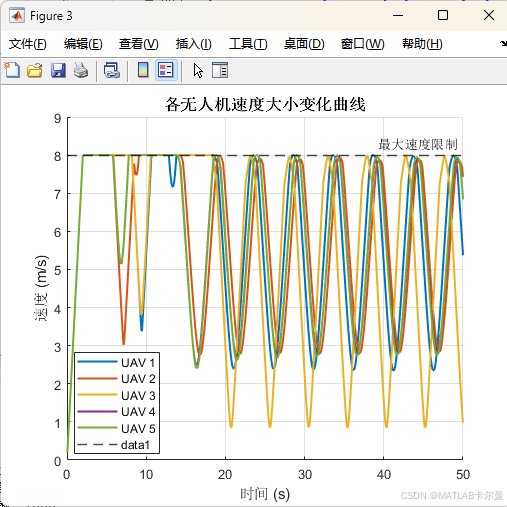
速度与加速度变化曲线:运动平滑,满足无人机动力学约束:
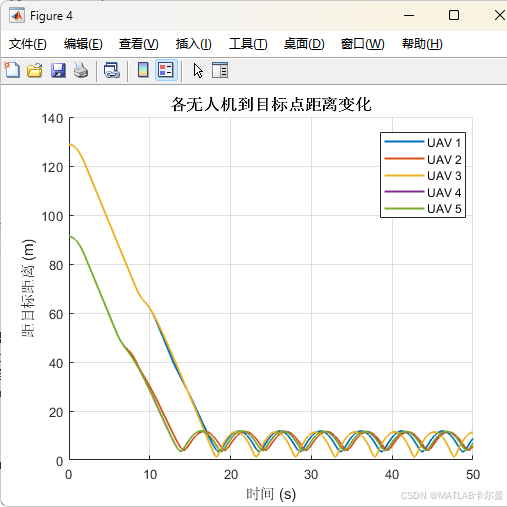
- 到目标的距离:
命令行输出的结果:
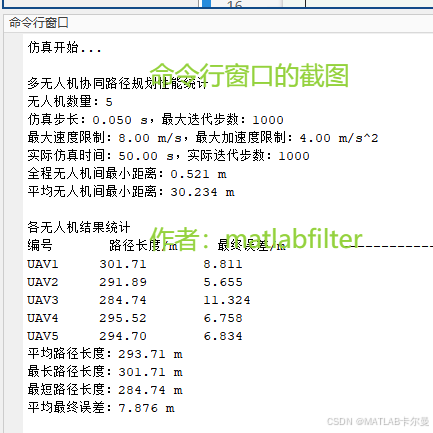
仿真结果表明,所提出的协同路径规划与防撞算法能够在动态复杂环境中稳定、高效地完成多无人机协同任务。
仿真场景设置:
- 无人机数量:5 架
- 空间范围:100m × 100m × 50m
- 静态障碍物:8 个
- 动态障碍物:3 个(随机运动)
- 任务目标:各无人机从初始位置出发,协同到达各自目标点
MATLAB 源代码
完整代码如下:
%% 动态环境下多无人机系统的协同路径规划与避碰仿真
% 基于改进人工势场法 APF + 速度障碍防撞
% 作者: matlabfilter(V同号,除前期达成一致外,付费咨询)
% 2026年5月11日 Ver2::优化输出
clc; clear; close all;
rng(0);
%% 全局参数设置
num_uav = 5; % 无人机数量
dt = 0.05; % 仿真步长,单位 s
max_iter = 1000; % 最大迭代步数
max_vel = 8.0; % 最大速度,单位 m/s
max_acc = 4.0; % 最大加速度,单位 m/s^2
safe_dist = 6.0; % 无人机间安全距离,单位 m
goal_tol = 1.5; % 到达目标容差,单位 m
k_att = 1.5; % 吸引力增益
k_rep_obs = 80.0; % 障碍物斥力增益
k_rep_uav = 60.0; % 无人机间斥力增益
d0_obs = 12.0; % 障碍物影响域半径,单位 m
d0_uav = 10.0; % 无人机间影响域半径,单位 m
d_switch = 5.0; % 吸引力切换距离
%% 起始点与目标点
g
%% 障碍物初始化
]; % 静态障碍物 [cx, cy, cz, radius]
static_obs_h = 30; % 静态柱状障碍物高度
dynamic_obs = [
20, 50, 15, 4, 1.5, 0.5, 0;
60, 20, 10, 3, -1.0, 1.2, 0;
40, 75, 12, 3, 0.8, -1.0, 0
]; % 动态障碍物 [cx, cy, cz, radius, vx, vy, vz]
%% 状态初始化
完整代码下载链接:https://download.csdn.net/download/callmeup/92863891
如需帮助,或有导航、定位滤波相关的代码定制需求,请点击下方卡片联系作者

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐

 9
9 0
0- 0



 已为社区贡献35条内容
已为社区贡献35条内容

所有评论(0)