丘陵果园多传感器SLAM与路径跟踪控制【附仿真】
✨ 长期致力于多传感器融合、同时定位与建图、路径跟踪、模型预测控制、模糊控制研究工作,擅长数据搜集与处理、建模仿真、程序编写、仿真设计。
✅ 专业定制毕设、代码
✅如需沟通交流,点击《获取方式》
(1)多传感器融合SLAM系统构建:
以履带式喷雾机为载体,装配RoboSense 32线激光雷达、Intel RealSense D435i相机和BMI088惯性测量单元。首先对IMU内参进行Allan方差标定,陀螺仪零偏不稳定性降至8.2°/h,加速度计零偏不稳定性0.012 mg;激光雷达与相机的外参通过手眼标定求解,重投影误差0.35像素。SLAM前端包含三个并行里程计约束:激光里程计采用点面分割分割出地面平面点与树干边缘点,对非地面点按曲率提取200个角点和400个平面点,使用ICP迭代求解相邻帧位姿;视觉里程计采用Shi-Tomasi提取200个角点,稀疏光流跟踪,并通过激光点云投影为2D特征点赋予深度,构造视觉重投影误差约束;惯性里程计通过IMU预积分提供帧间高速率位姿约束。后端用iSAM2因子图优化,关键帧选取条件为平移超过0.5米或旋转超过5°。回环检测融合激光Scan Context描述子和视觉词袋模型,在检测到回环后,构建局部特征地图进行ICP精细匹配,将回环约束加入因子图进行全局优化。在梯状柑橘园采集的1.2公里数据上,绝对位置误差均值0.13米,建图一致性良好。
(2)履带底盘运动学建模与模糊MPC路径跟踪:
对履带式喷雾机建立考虑滑移的运动学模型:x_dot=v·cos(θ)/(1-i),y_dot=v·sin(θ)/(1-i),θ_dot = ω/(1-α),其中i为纵向滑移率,α为转向滑移角,与地面附着和转弯半径相关。对模型在参考轨迹点处线性化,离散化周期0.05秒,状态量X=[x, y, θ, v]^T,控制量U=[v_cmd, ω_cmd]^T。MPC控制器预测时域Np=25,控制时域Nc=8,代价函数二次型权重Q=diag(1,1,0.5,0.1),R=diag(0.1,0.2)。在线性二次型基础上,引入模糊调节机制:以横向误差ed和航向误差eθ的绝对值作为模糊输入,输出权重修正因子Δλed和ΔR。论域划分为小、中、大三个等级,以高斯隶属函数计算隶属度,模糊规则规定当ed大且eθ大时,增大Q中横向偏差权重、减小控制量惩罚以快速纠偏;当误差很小时则适当放松精度追求平稳。鱼钩路径仿真显示,模糊MPC的横向距离偏差最大值0.11米,航向角偏差最大值2.76°,质心侧偏角最大值1.12°,均优于普通MPC和纯跟踪控制器。
(3)丘陵果园实地试验验证:
在坡度5°至15°的丘陵柑橘园内铺设长约300米的S形作业路径,包含3处半径6米急弯。定位建图实验中,本算法定位的路径偏差最大值0.28米,平均值0.13米,显著优于LeGO-LOAM(最大值0.68米)和LINS(最大值0.52米),构建的地图在果树行间呈现清晰的行道边界,树干位置与人工测量值偏差在0.2米以内。路径跟踪实验中,模糊MPC控制器的横向距离偏差最大值0.43米、均值0.16米,航向角偏差最大值5.77°、均值2.55°,质心侧偏角最大值1.24°、均值0.48°。与纯跟踪控制器(最大横向偏差0.97米)和普通MPC(0.58米)相比,模糊MPC在急弯处的路径贴合能力和稳定性明显更优。全程喷雾机实际行驶速度保持在1.2至1.8米/秒,最高作业效率下每小时可覆盖0.8公顷果园,达到实用化水平。
import numpy as np
import cvxopt
from scipy.spatial import KDTree
# 点面分割提取
def extract_planar_edge_points(cloud):
# cloud: Nx3 点云
# 使用RANSAC提取地面平面
best_plane = None
max_inliers = 0
for _ in range(50):
sample_ids = np.random.choice(len(cloud), 3, replace=False)
p1,p2,p3 = cloud[sample_ids]
v1 = p2 - p1
v2 = p3 - p1
normal = np.cross(v1, v2)
d = -normal.dot(p1)
dists = np.abs(cloud.dot(normal) + d) / np.linalg.norm(normal)
inliers = cloud[dists < 0.1]
if len(inliers) > max_inliers:
max_inliers = len(inliers)
best_plane = (normal, d)
planar_mask = dists < 0.1
plane_points = cloud[planar_mask]
other_points = cloud[~planar_mask]
return plane_points, other_points
# 滑移运动学模型离散化
def kinematics_model(state, control, dt, i=0.05, alpha=0.03):
x, y, theta, v = state
v_cmd, omega_cmd = control
v_actual = v_cmd / (1 - i)
omega_actual = omega_cmd / (1 - alpha)
x_new = x + v_actual * np.cos(theta) * dt
y_new = y + v_actual * np.sin(theta) * dt
theta_new = theta + omega_actual * dt
return np.array([x_new, y_new, theta_new, v_cmd])
def fuzzy_mpc_weights_finetune(ed, e_theta):
# 模糊调节因子计算
mu_small = np.exp(-ed**2/0.01)
mu_large = 1 - mu_small
delta_q = 5.0 * mu_large
delta_r = -0.5 * mu_large
return delta_q, delta_r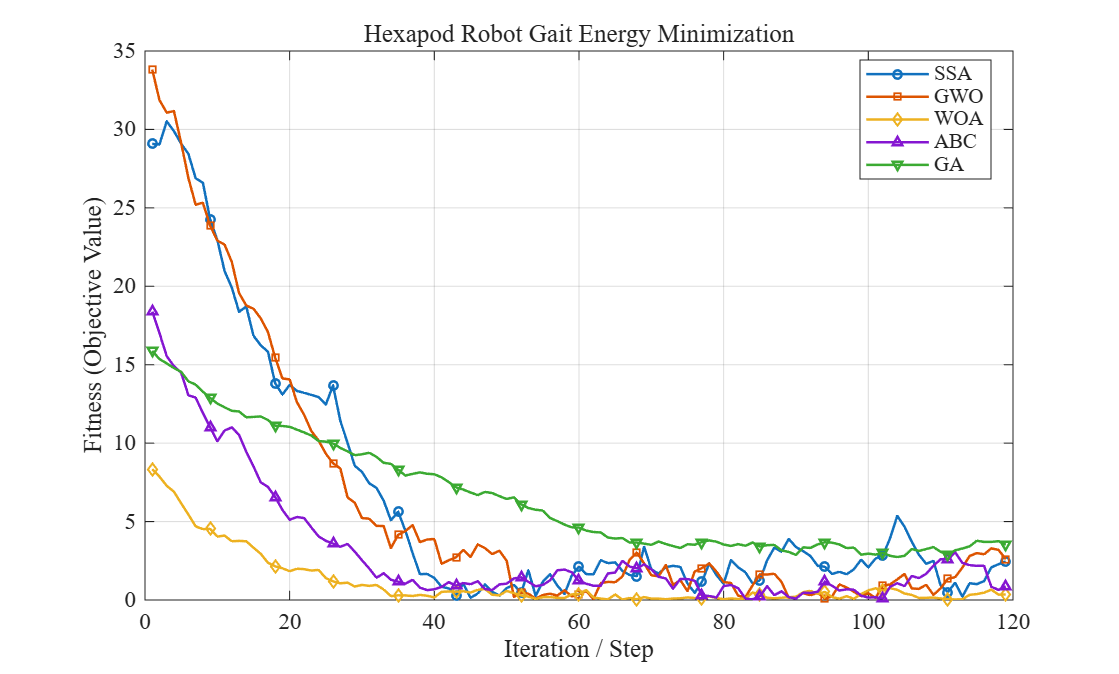

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐
 0
0 0
0- 0



 已为社区贡献16条内容
已为社区贡献16条内容

所有评论(0)