【Isaac Lab/Isaac Sim】教程2:CAD转URDF——基于SolidWorks插件solidworks_urdf_exporter
文章目录
0 准备
- Solid Works 2018 SP5及以上版本
- solidworks_urdf_exporter
- UR3六轴机械臂CAD装配模型(可从官网获得)
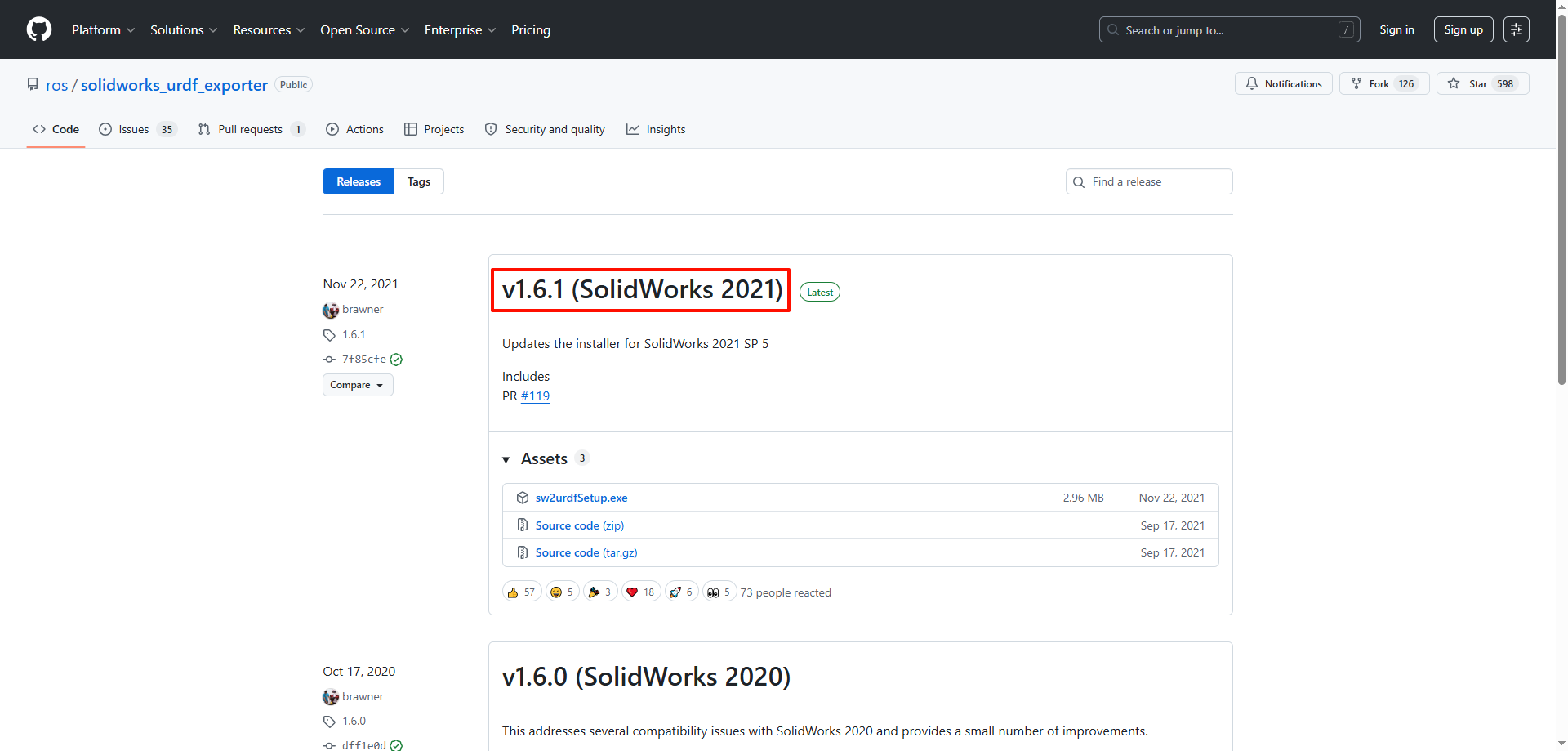
1 安装solidworks_urdf_exporter
-
根据SolidWorks版本下载对应的solidworks_urdf_exporter插件
-
双击sw2urdfSetup.exe即可完成安装。
-
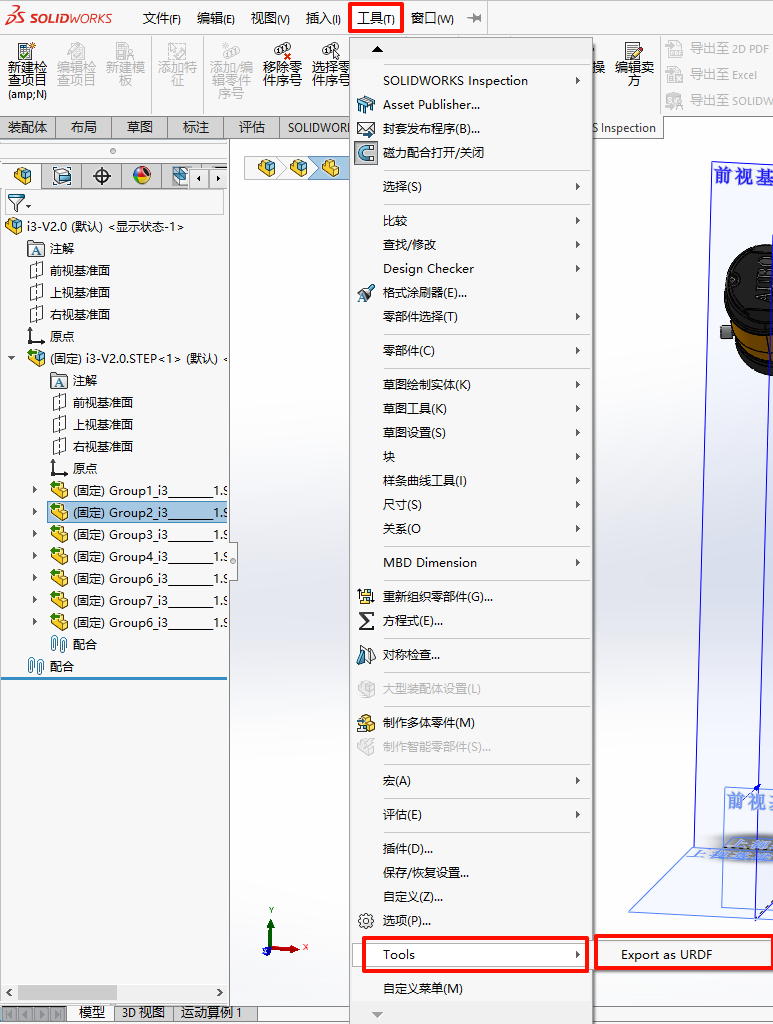
打开Solid Works,选择工具->Tools即可看到Export as URDF插件,表示插件已经安装成功。
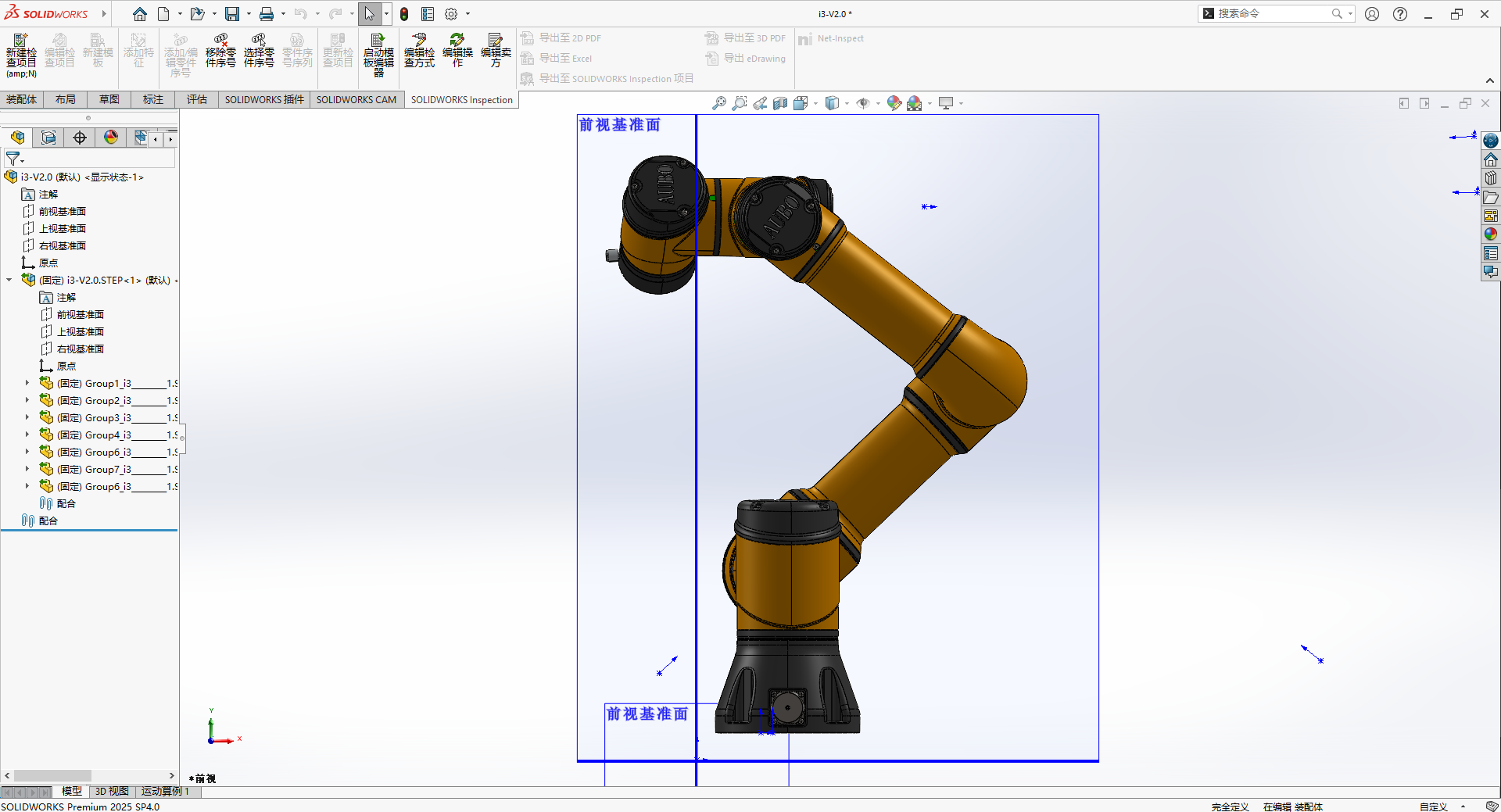
2 利用solidworks_urdf_exporter插件导出urdf机器人模型(以UR3六轴机械臂为例)
- 打开Solid Works,加载UR3六轴机械臂Step模型。
-
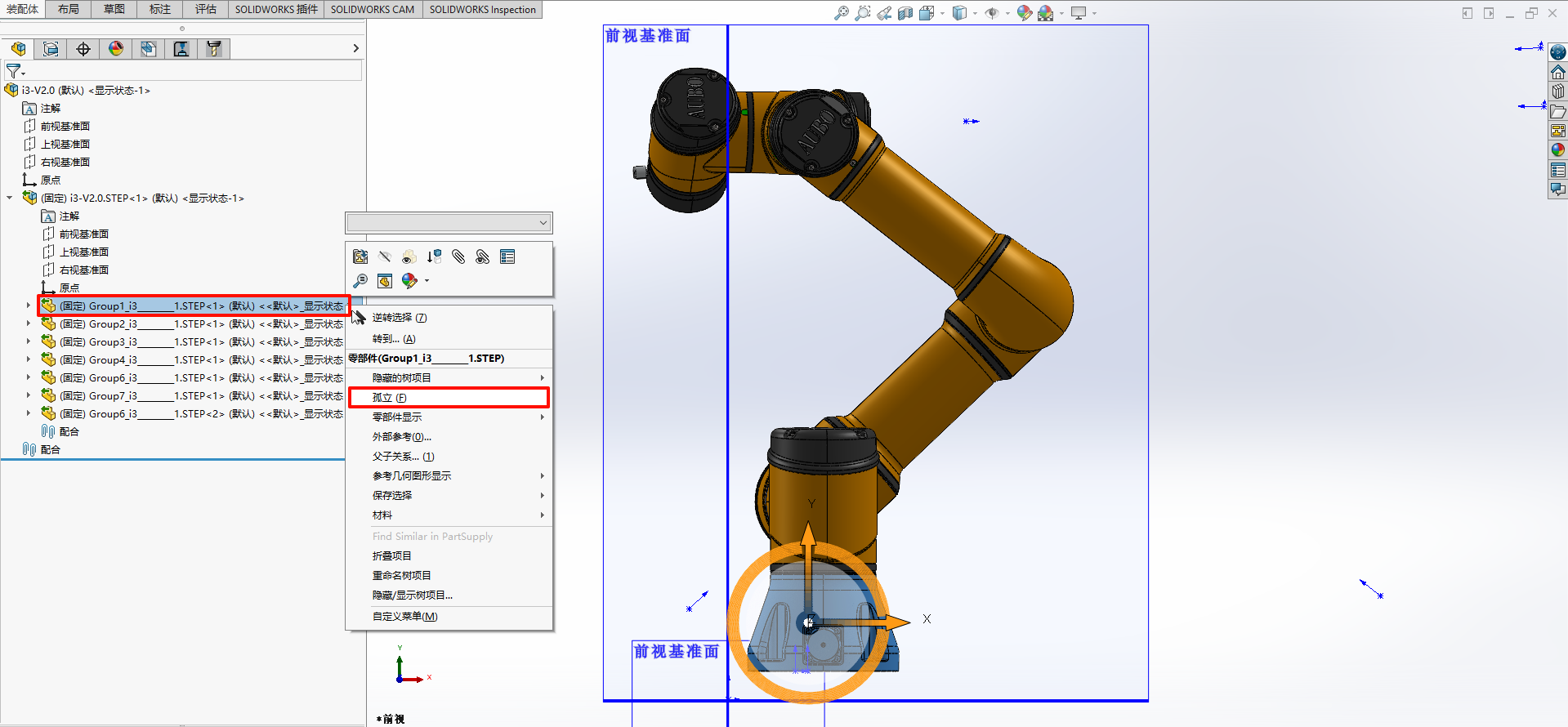
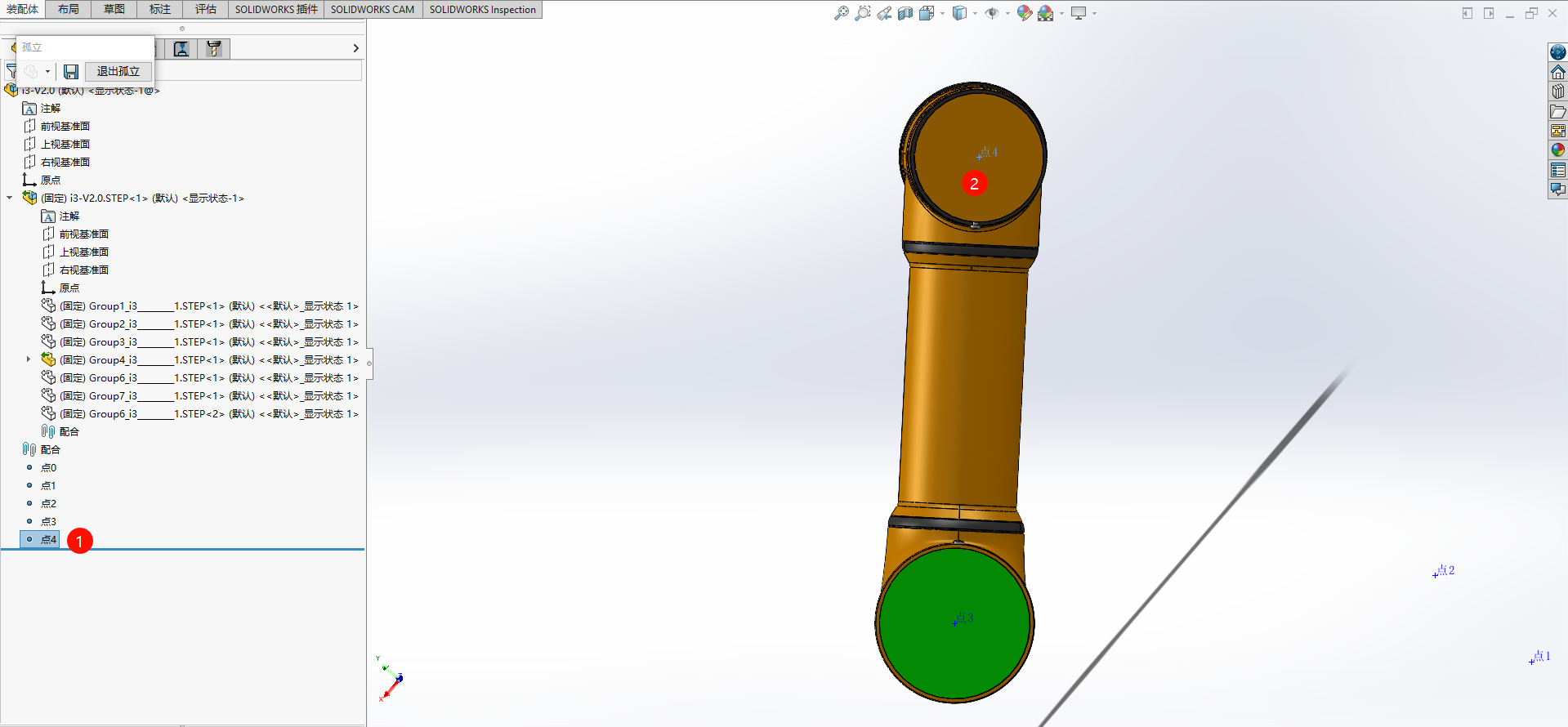
创建参考点
-
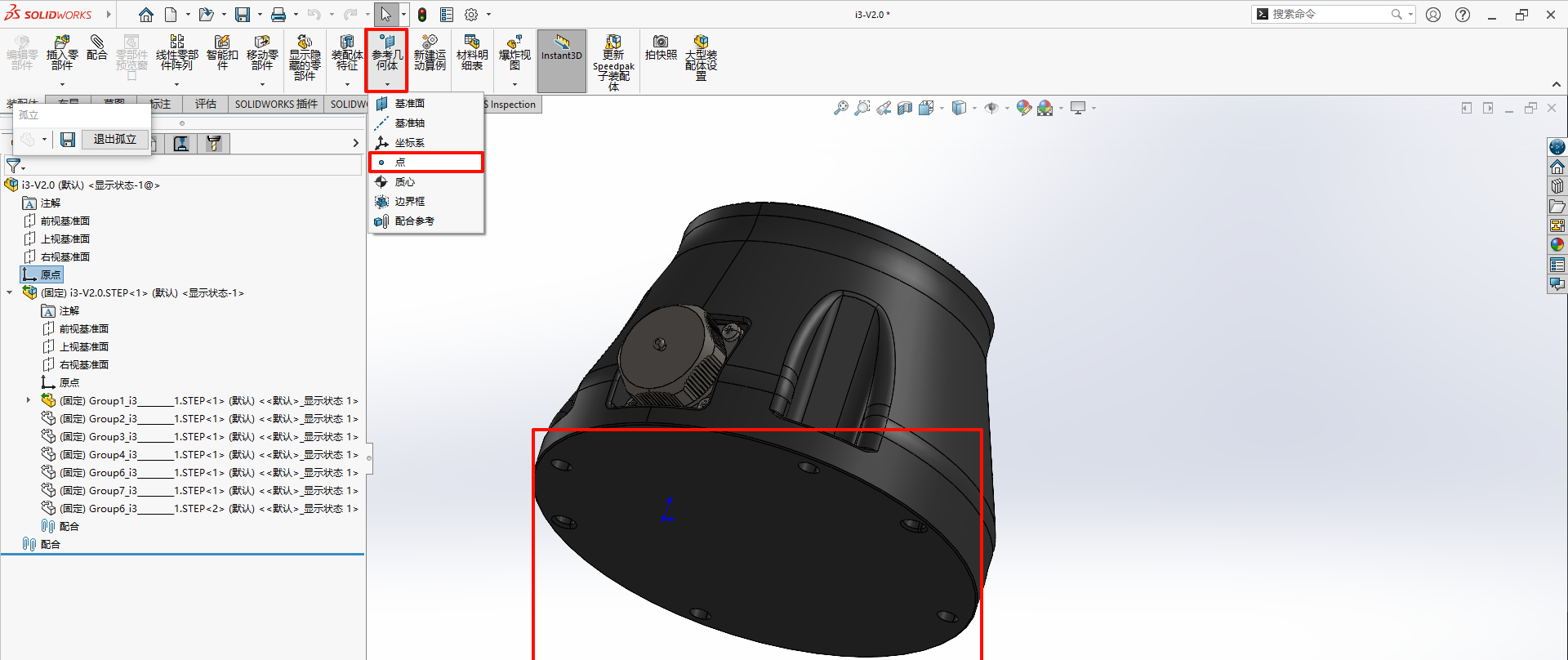
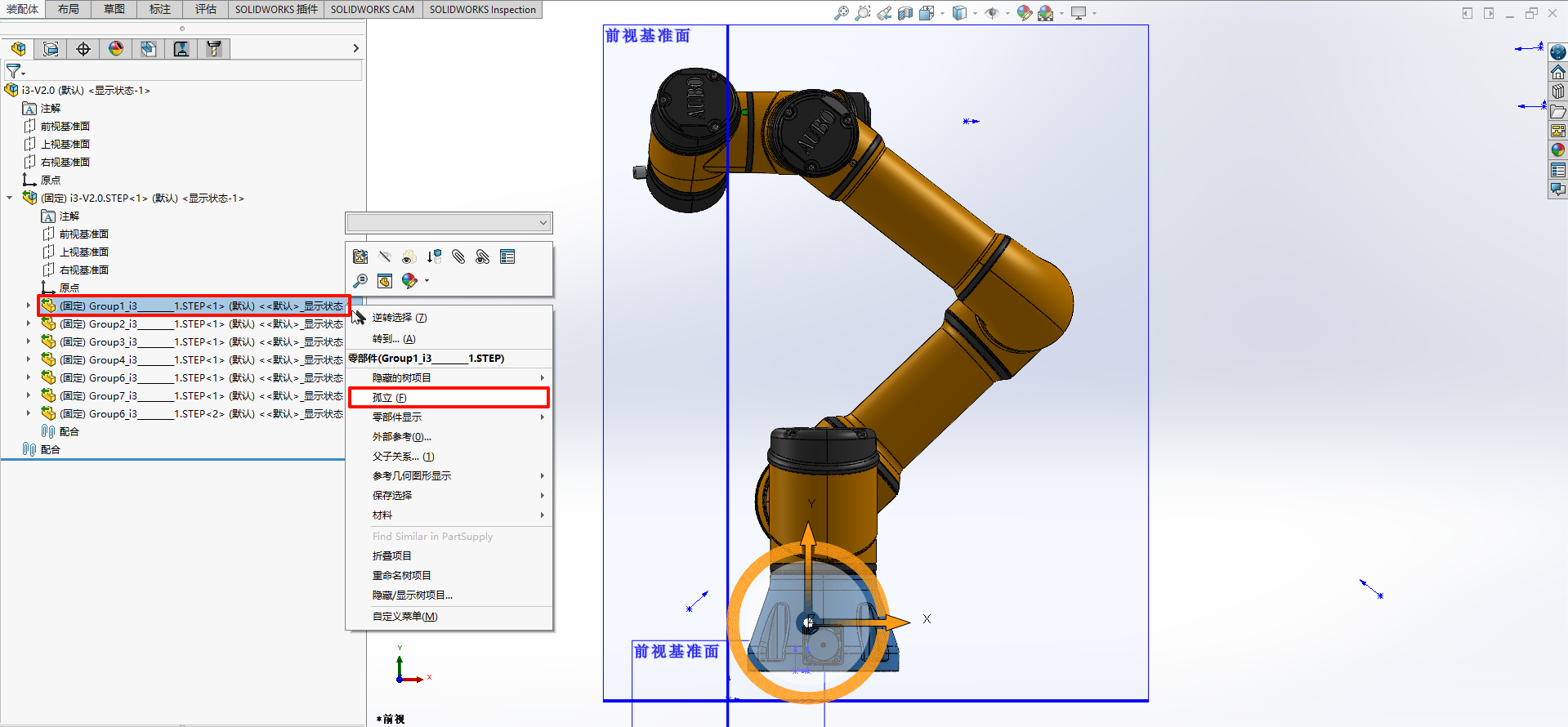
选中基座实体,右键点击孤立,单独显示基座实体
-
点击装配体->参考几何体->点,创建点
-
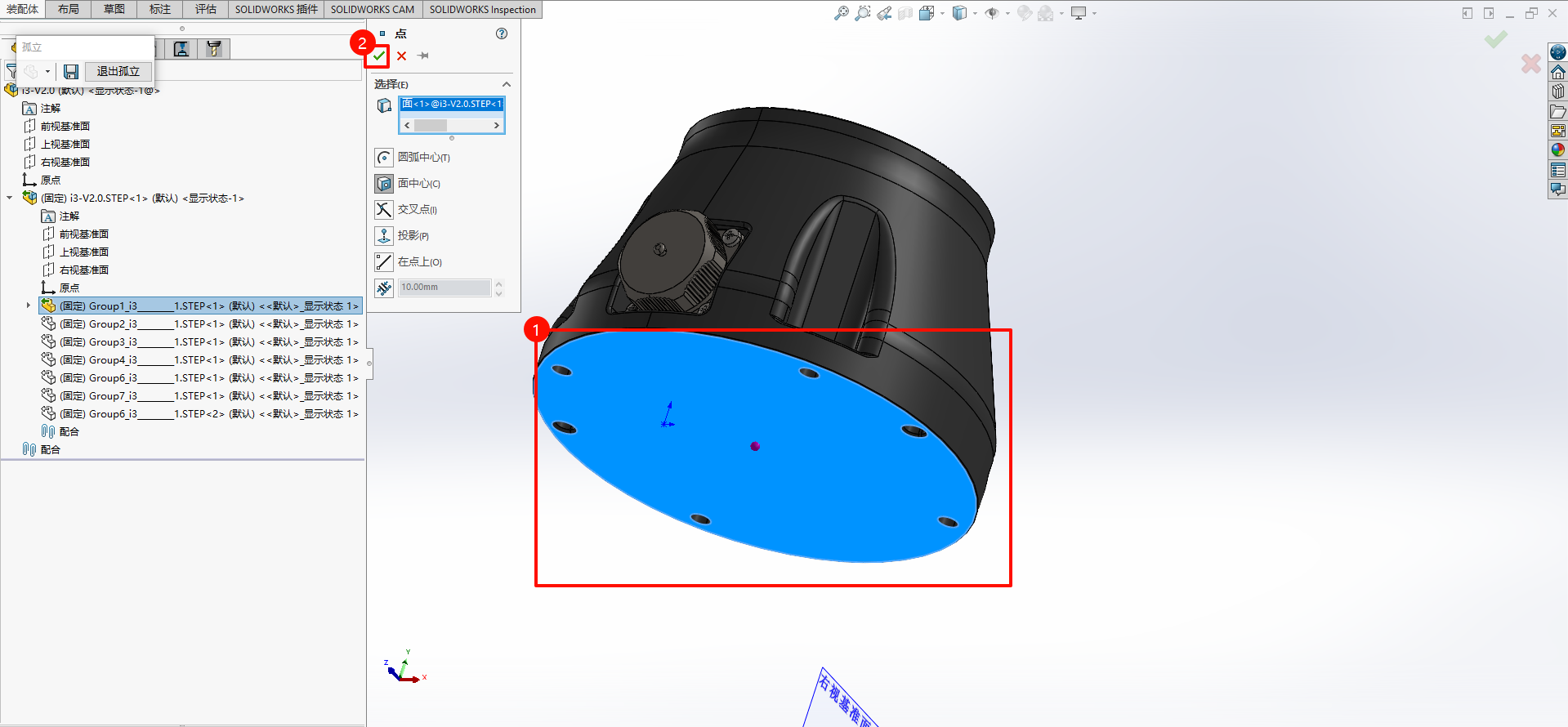
选择底面圆弧,然后点击对勾,创建一个点。
-
将点重命名为点0。
-
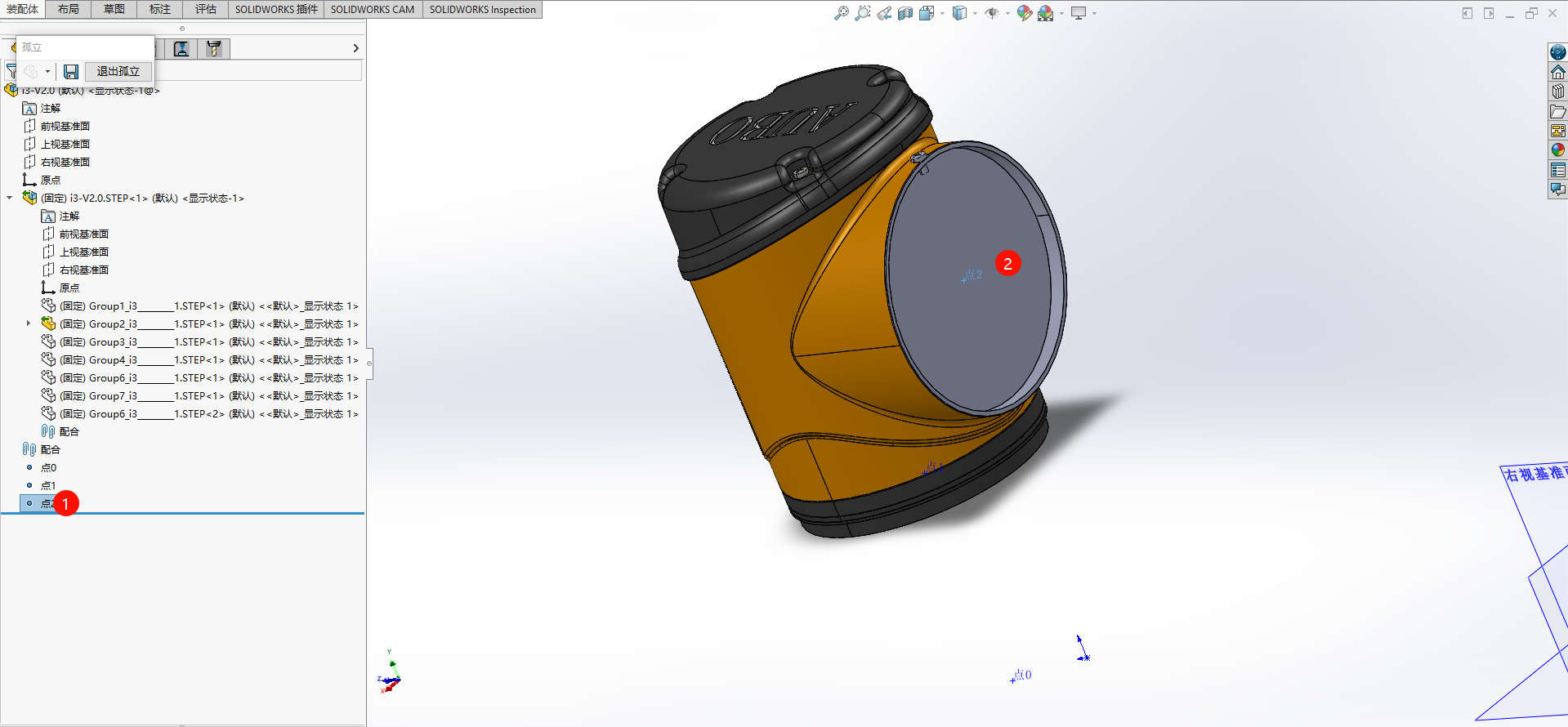
相同的操作选择顶面圆弧,创建另外一个参考点,命名为点1。
-
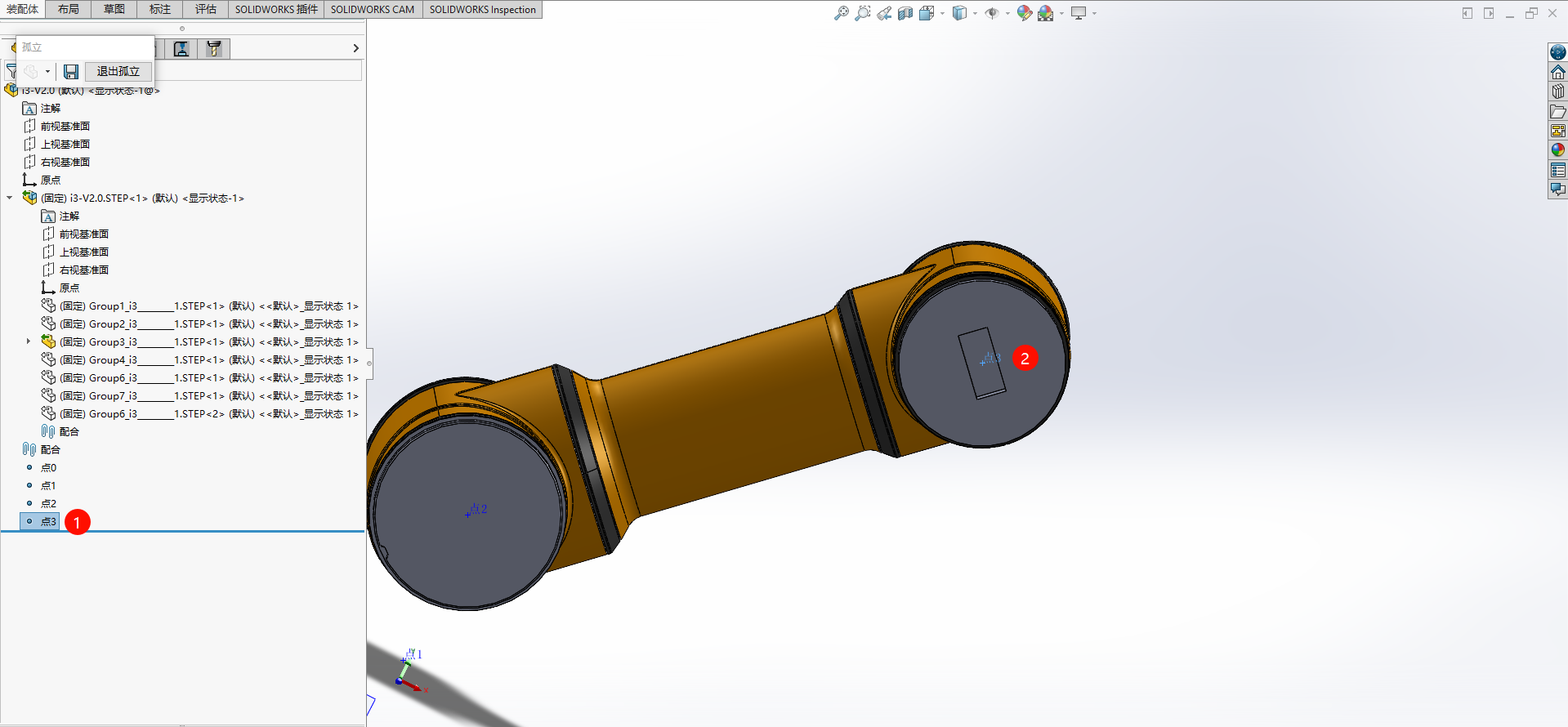
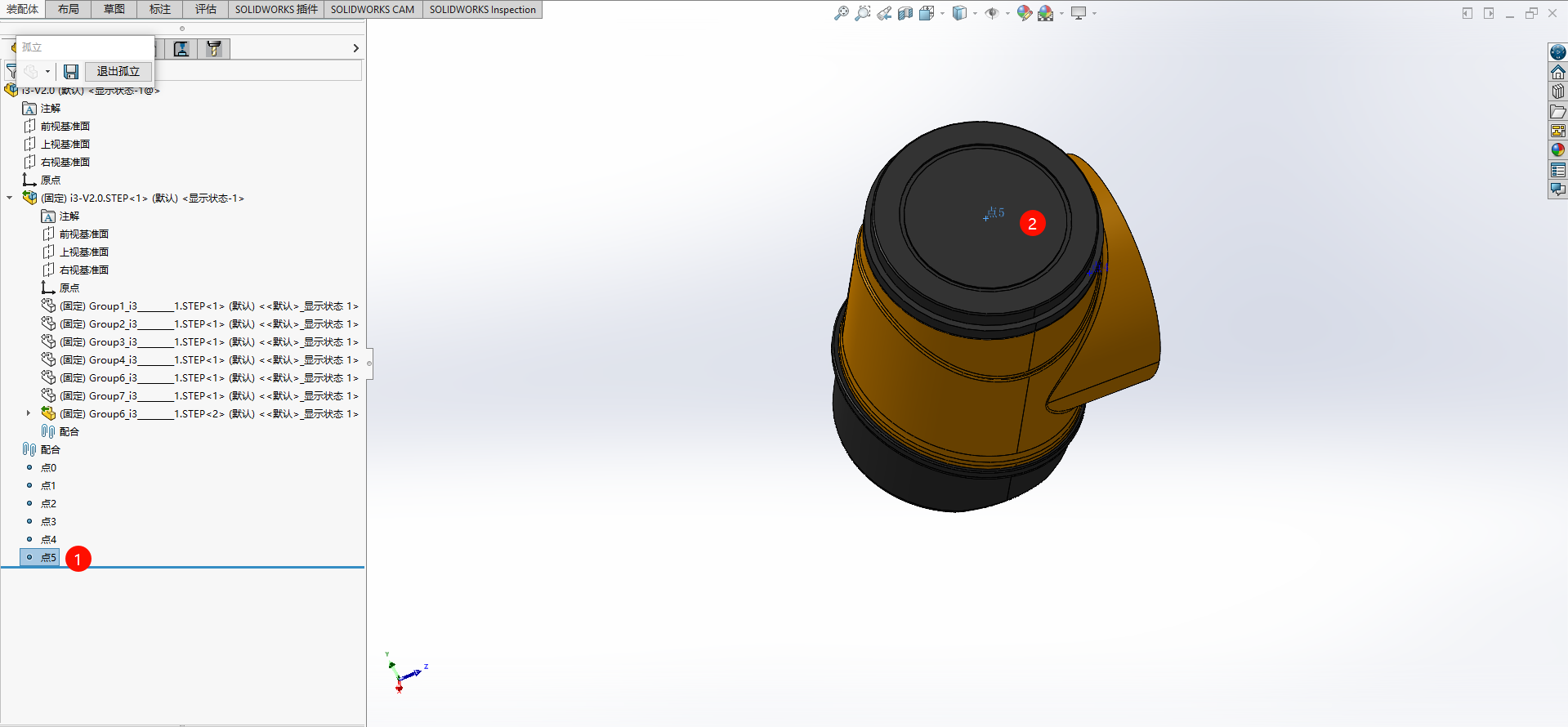
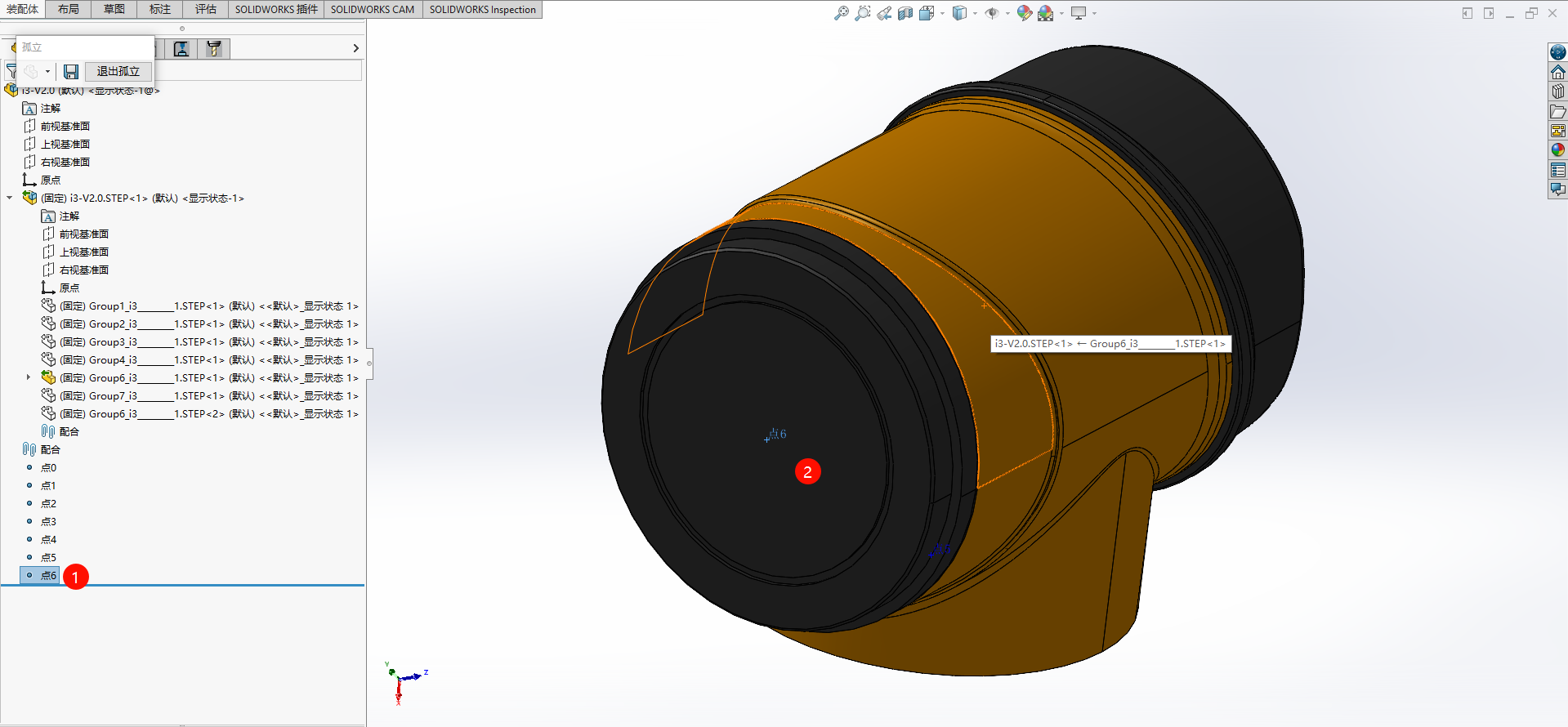
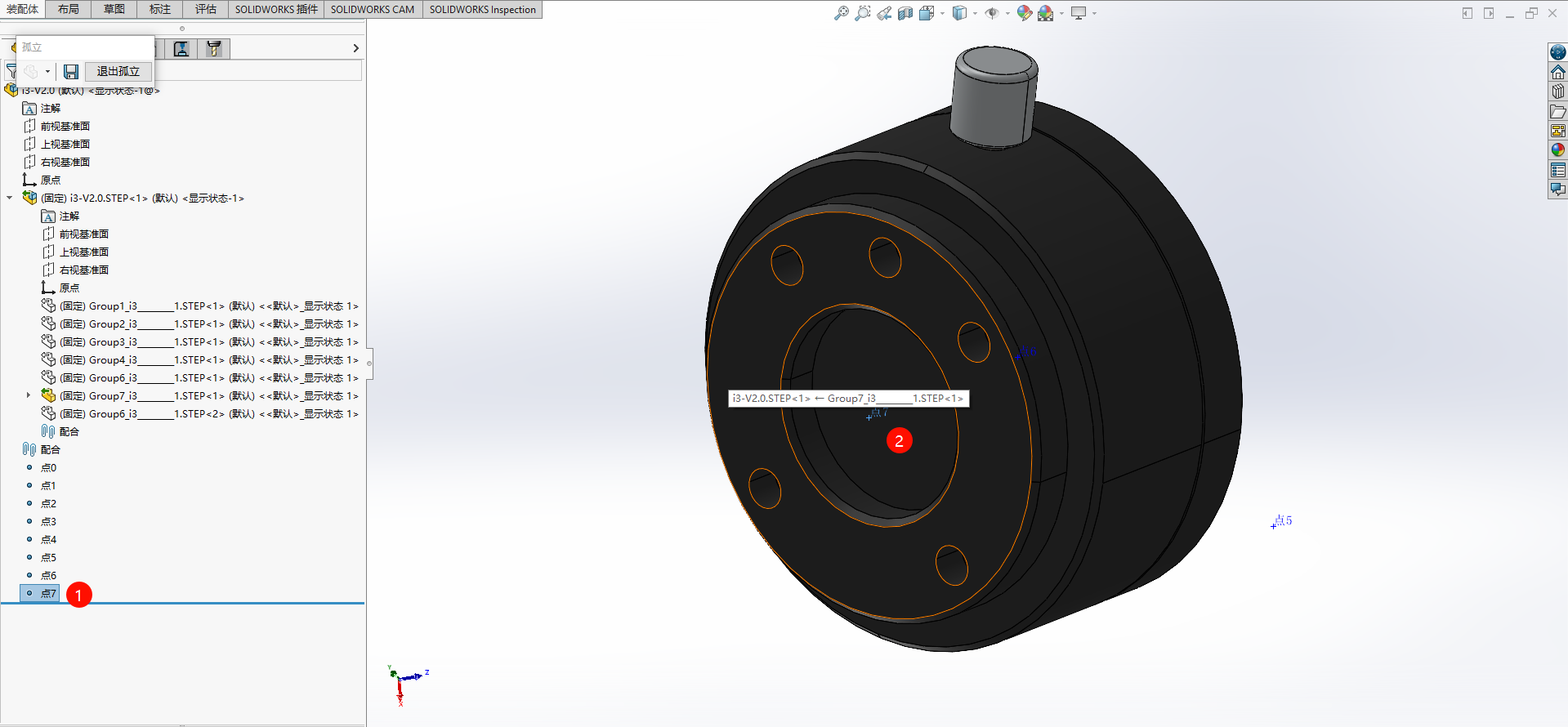
相同的操作给第二节连杆顶面创建一个参考点。
-
依次类推。
-
-
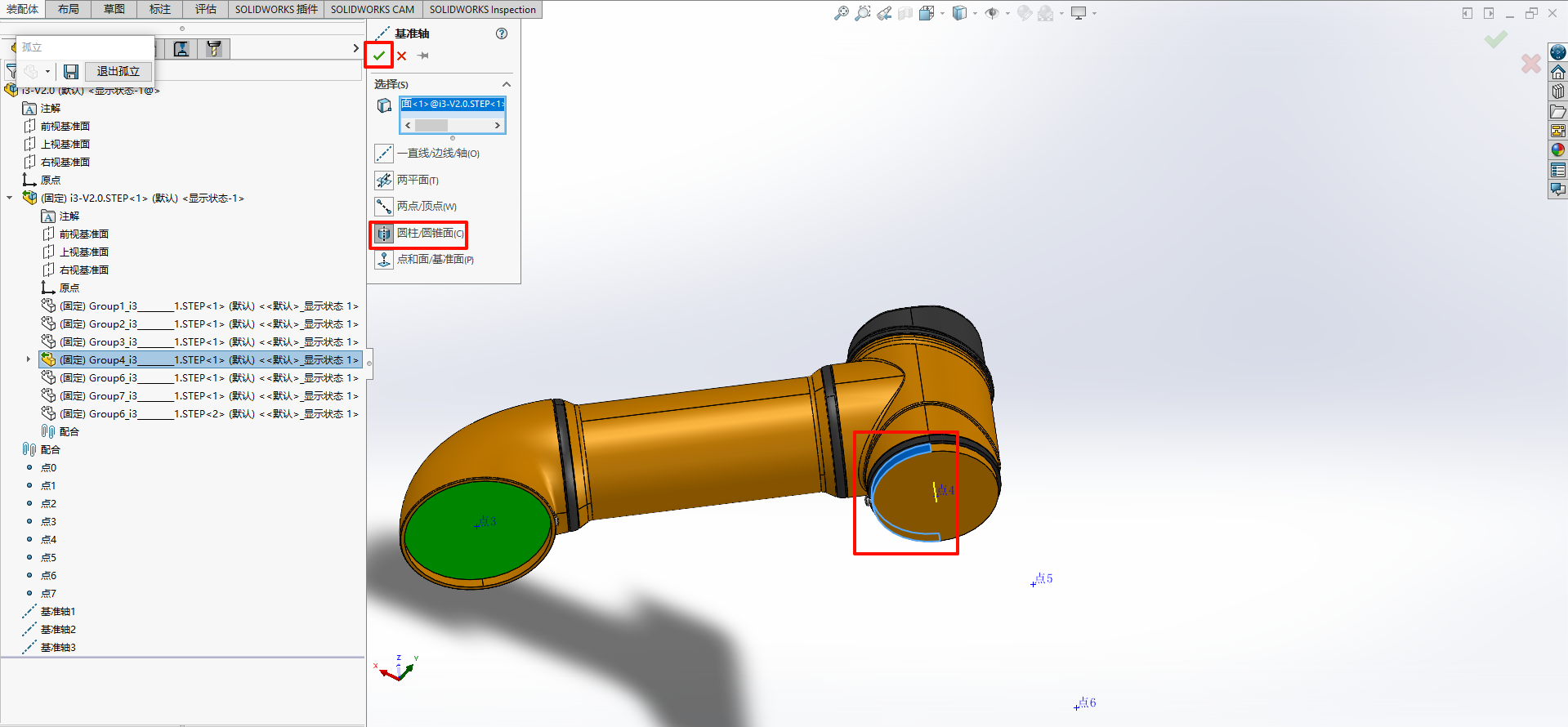
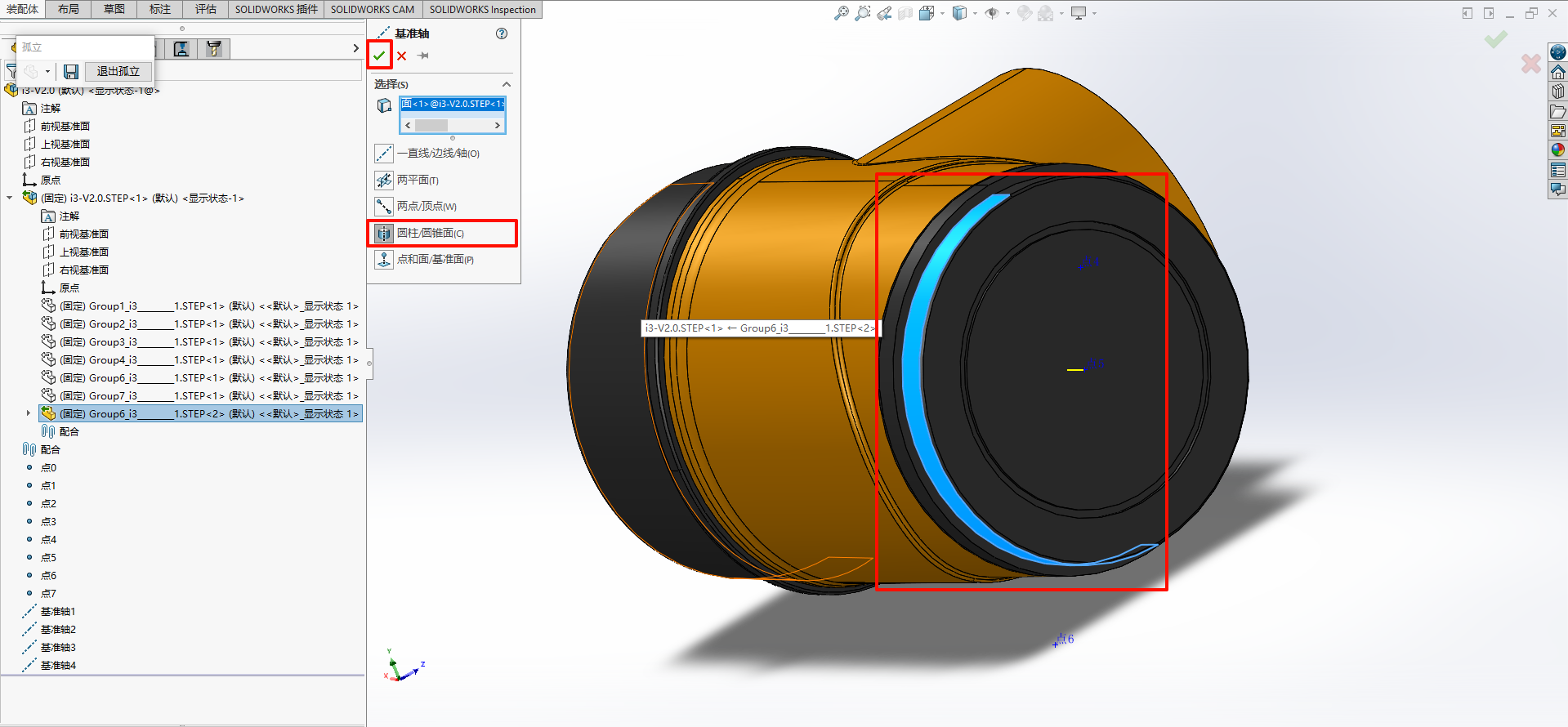
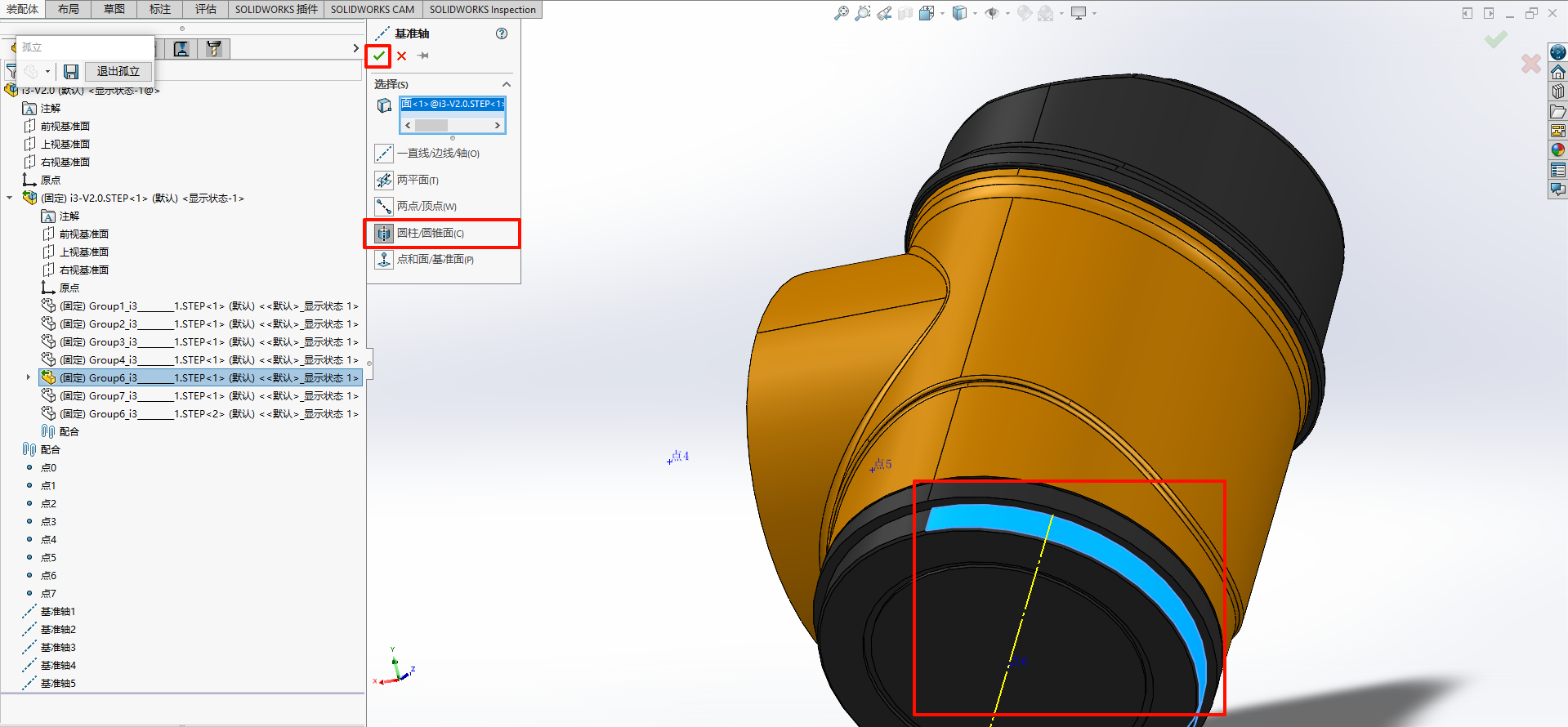
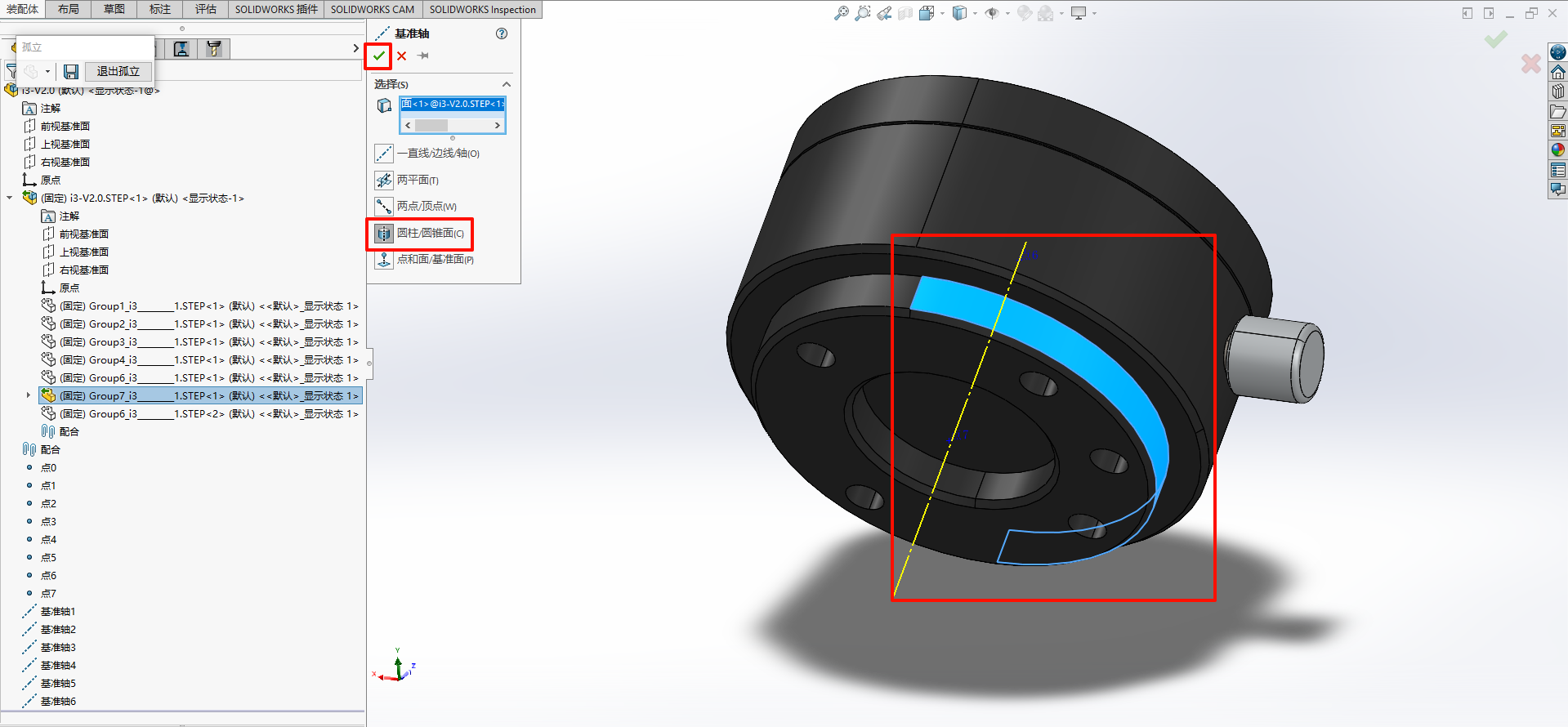
创建基准轴
-
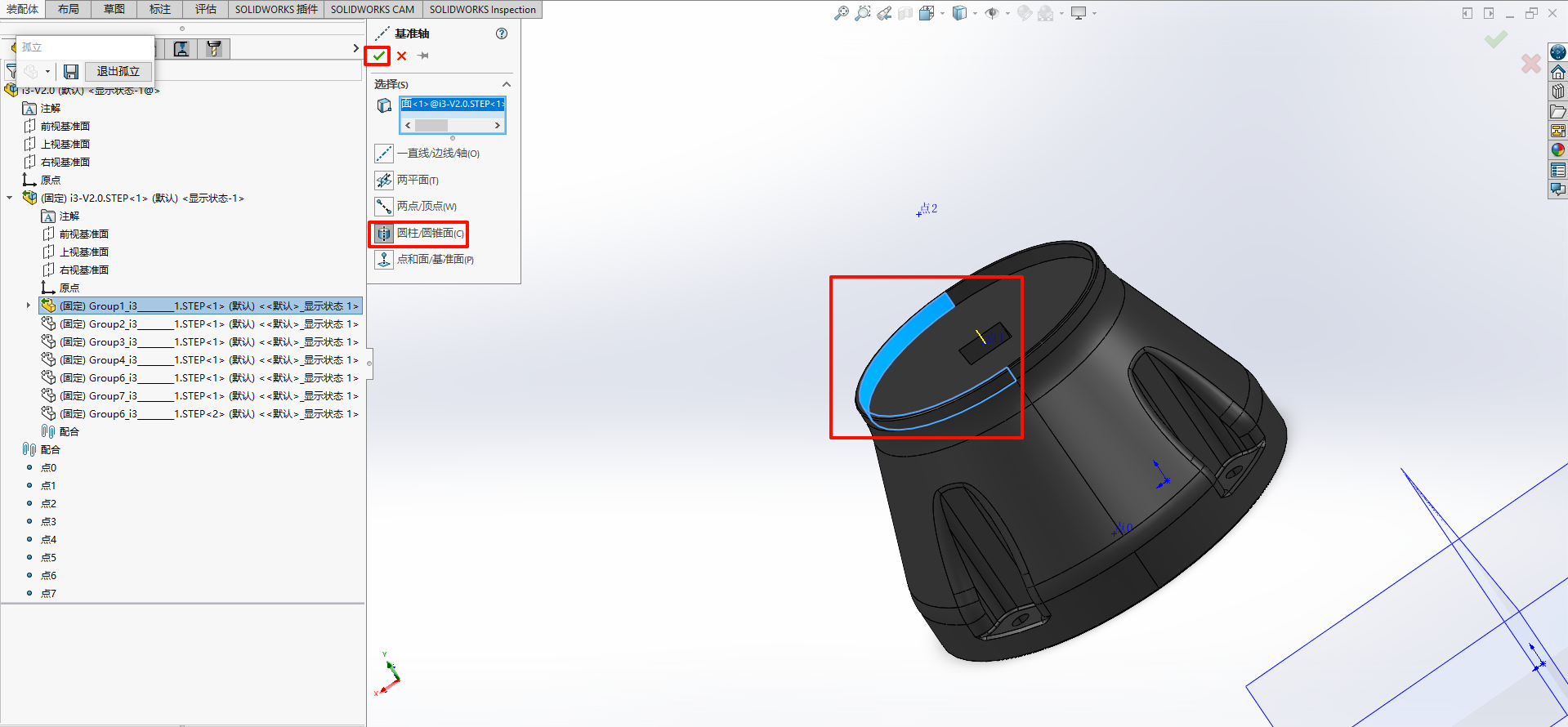
选中基座实体,右键点击孤立,单独显示基座实体
-
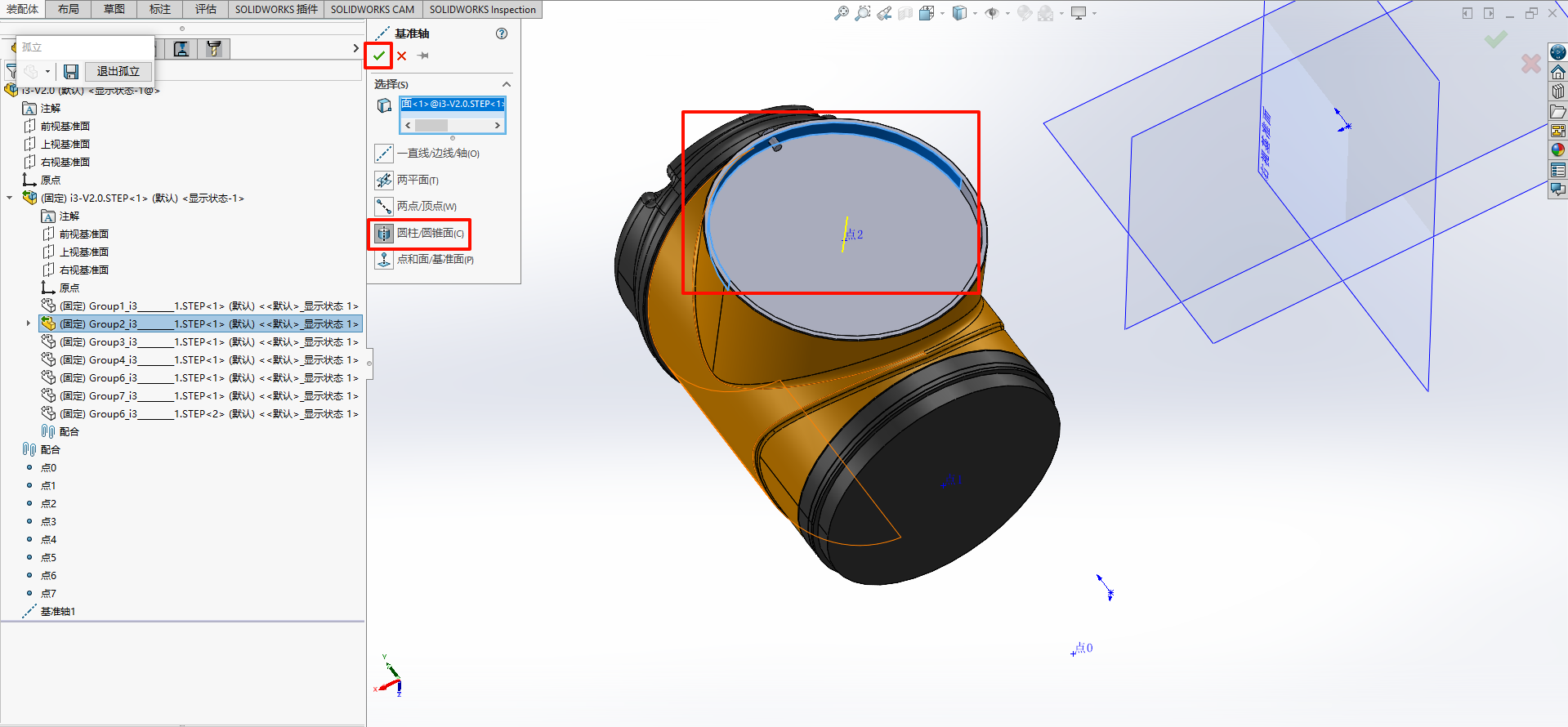
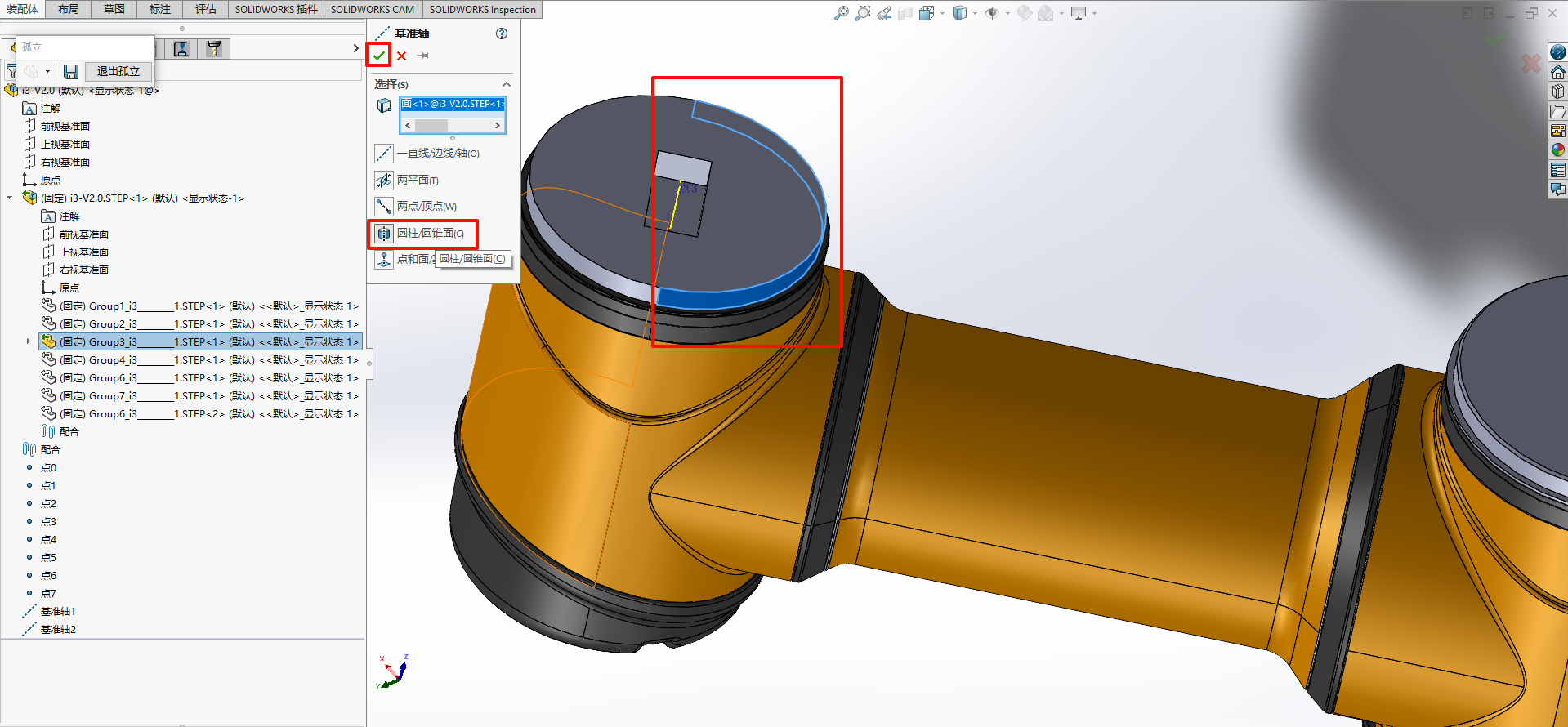
点击装配体->参考几何体->基准轴,创建基准轴,命名为基准轴1
-
依次类推,为每一个连杆创建基准轴。
-
-
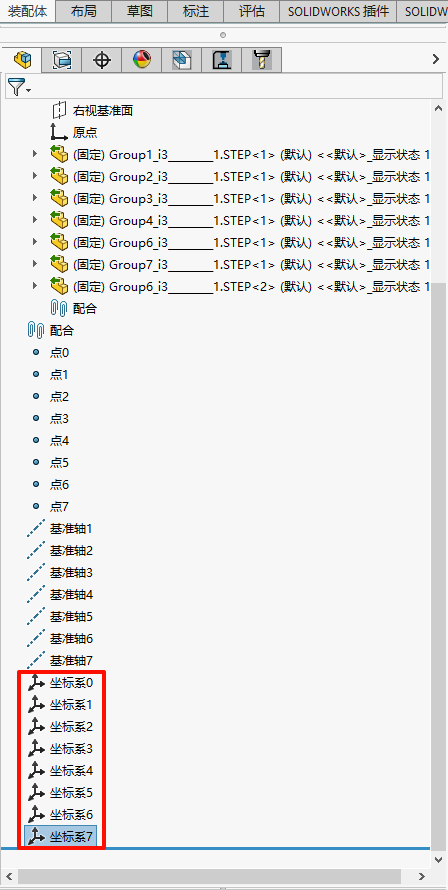
创建坐标系
-
选中点0,点击装配体->参考几何体->坐标系,创建坐标系,并命名为坐标系0。
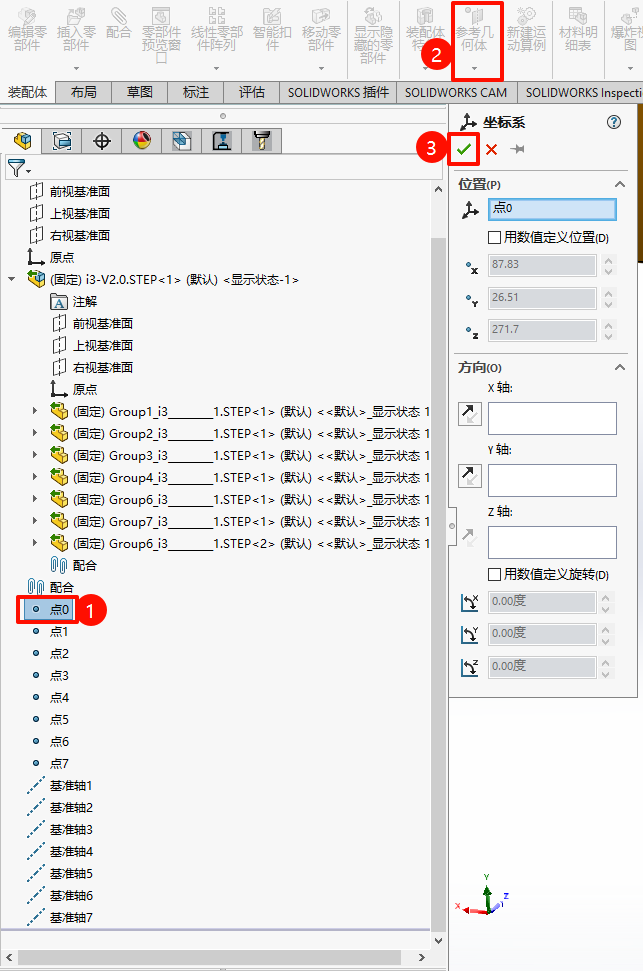
-
依次类推,为每一个点创建一个坐标系。
-
-
导出URDF
-
先保存工程,然后点击工具->Tools->Export as URDF。
-
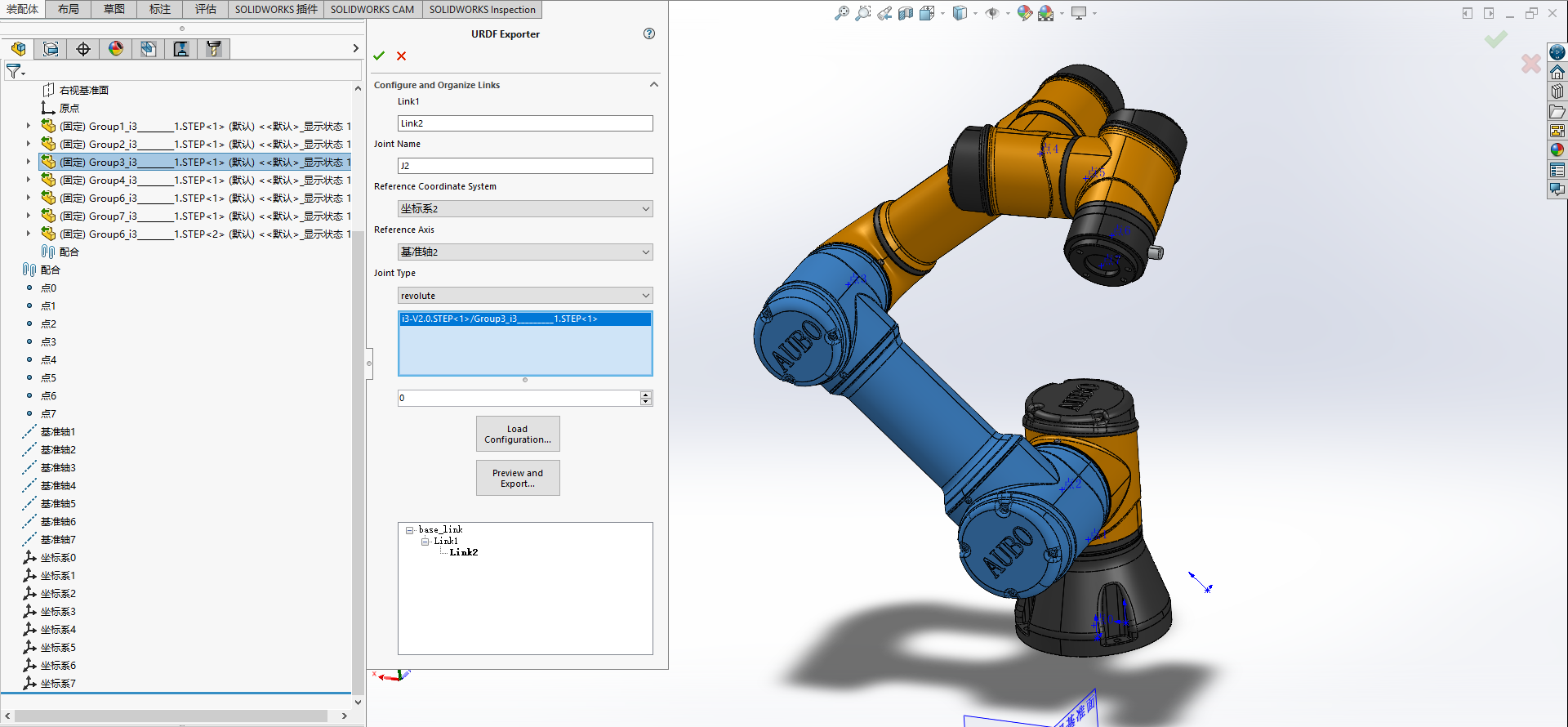
设置基座参数,选择坐标系0,选中基座实体。
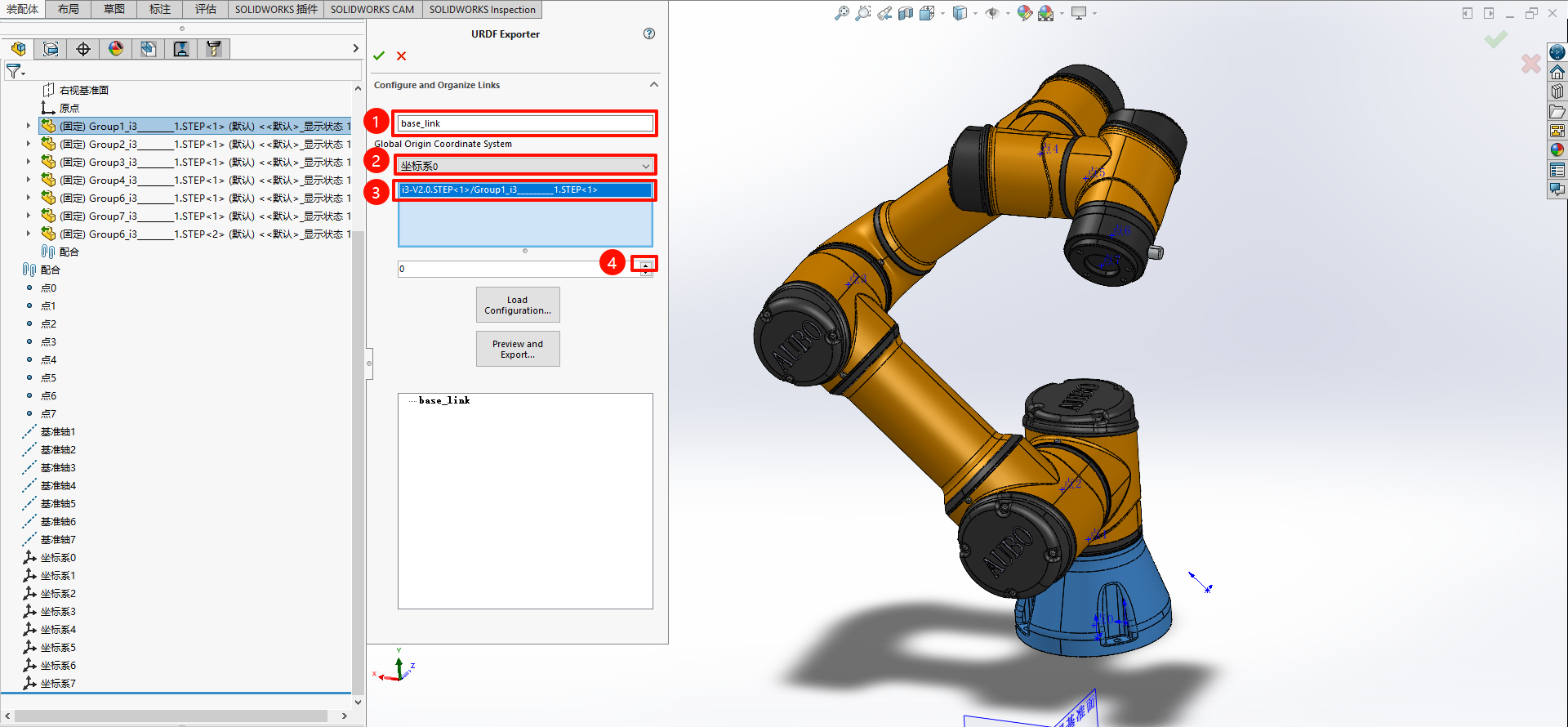
-
依次类推,设置所有连杆
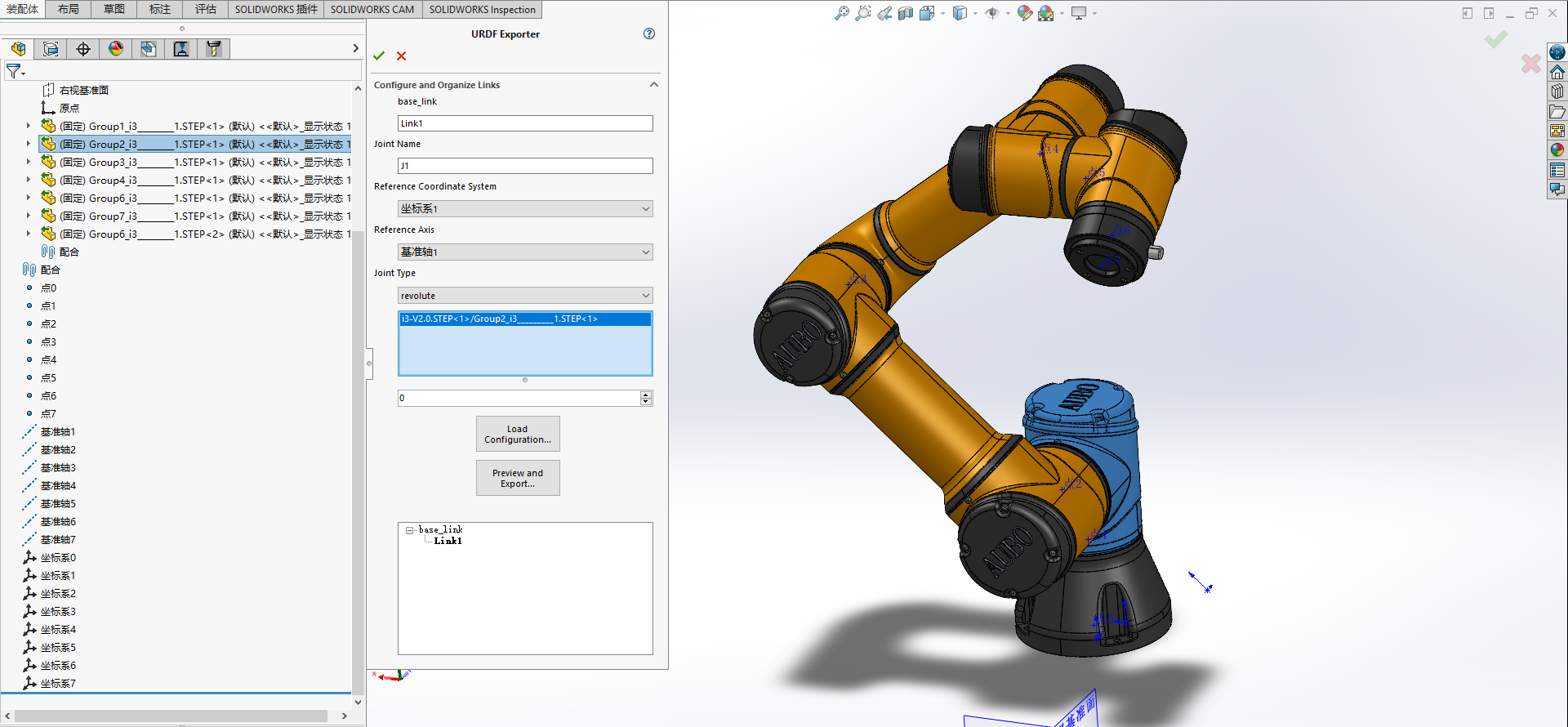
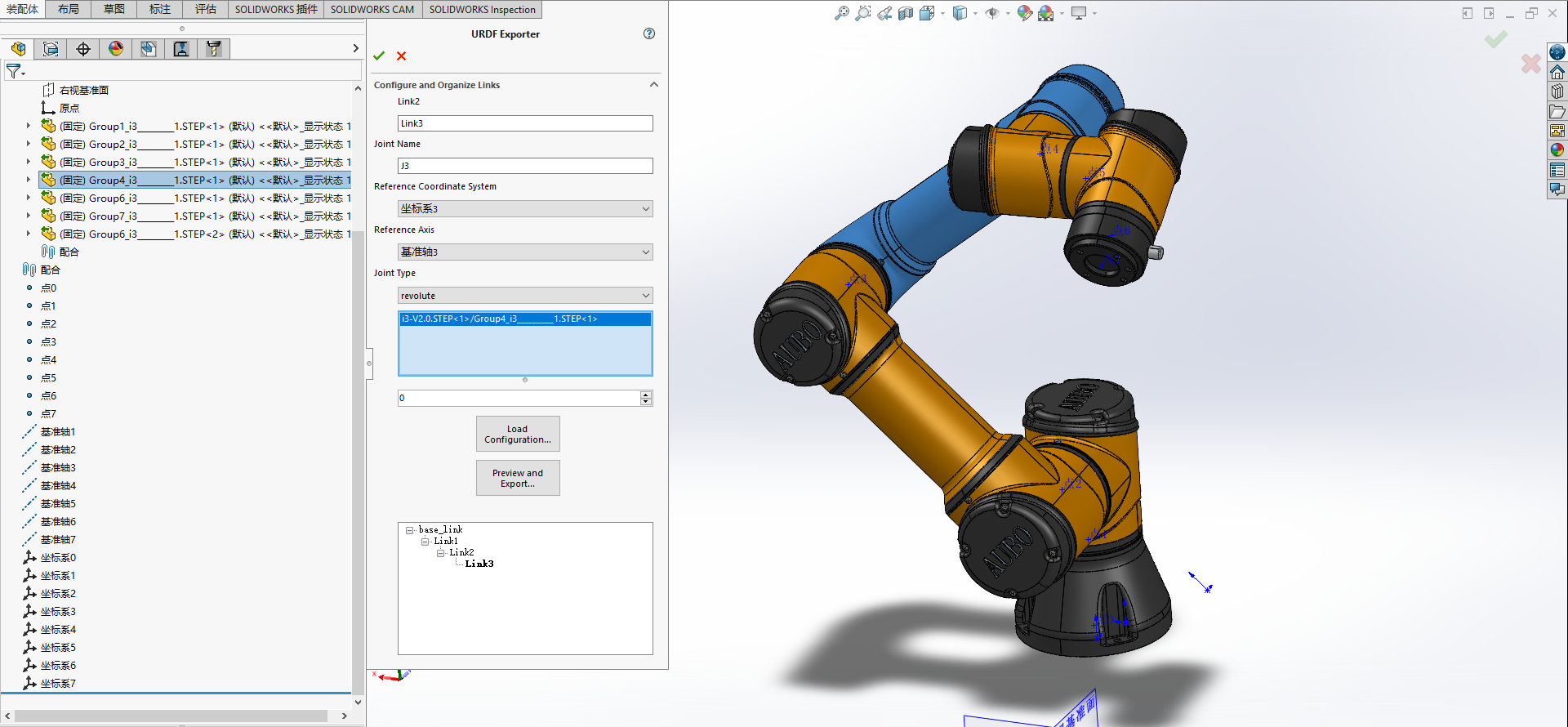
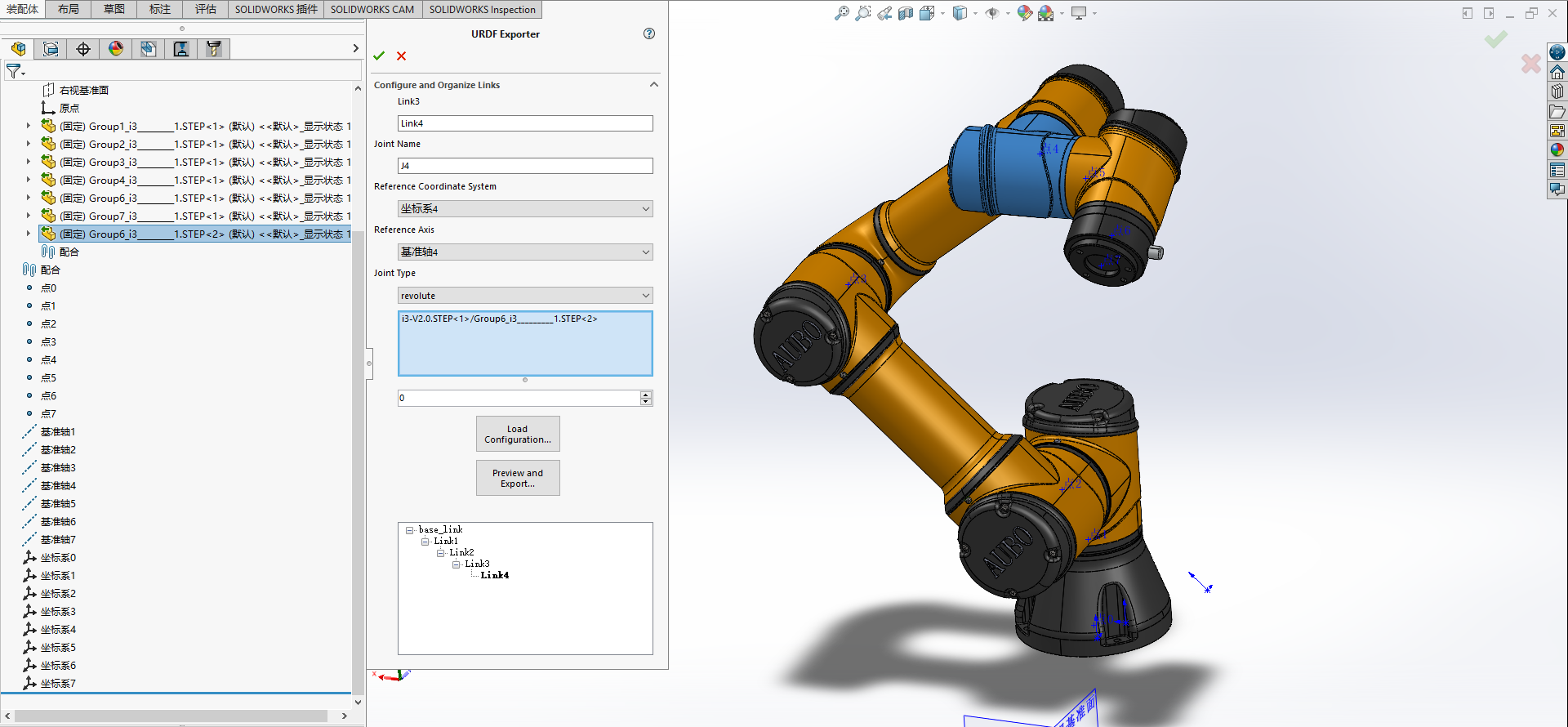
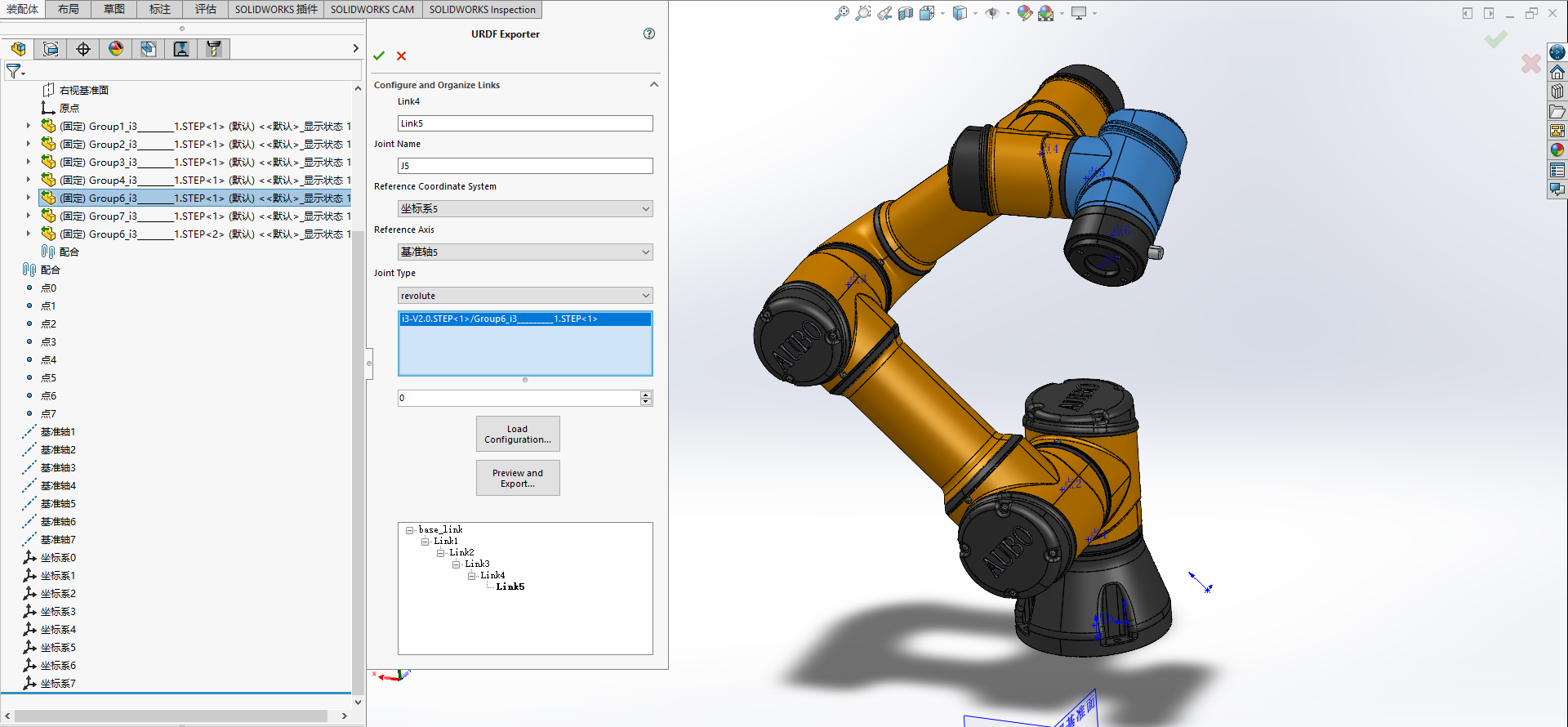
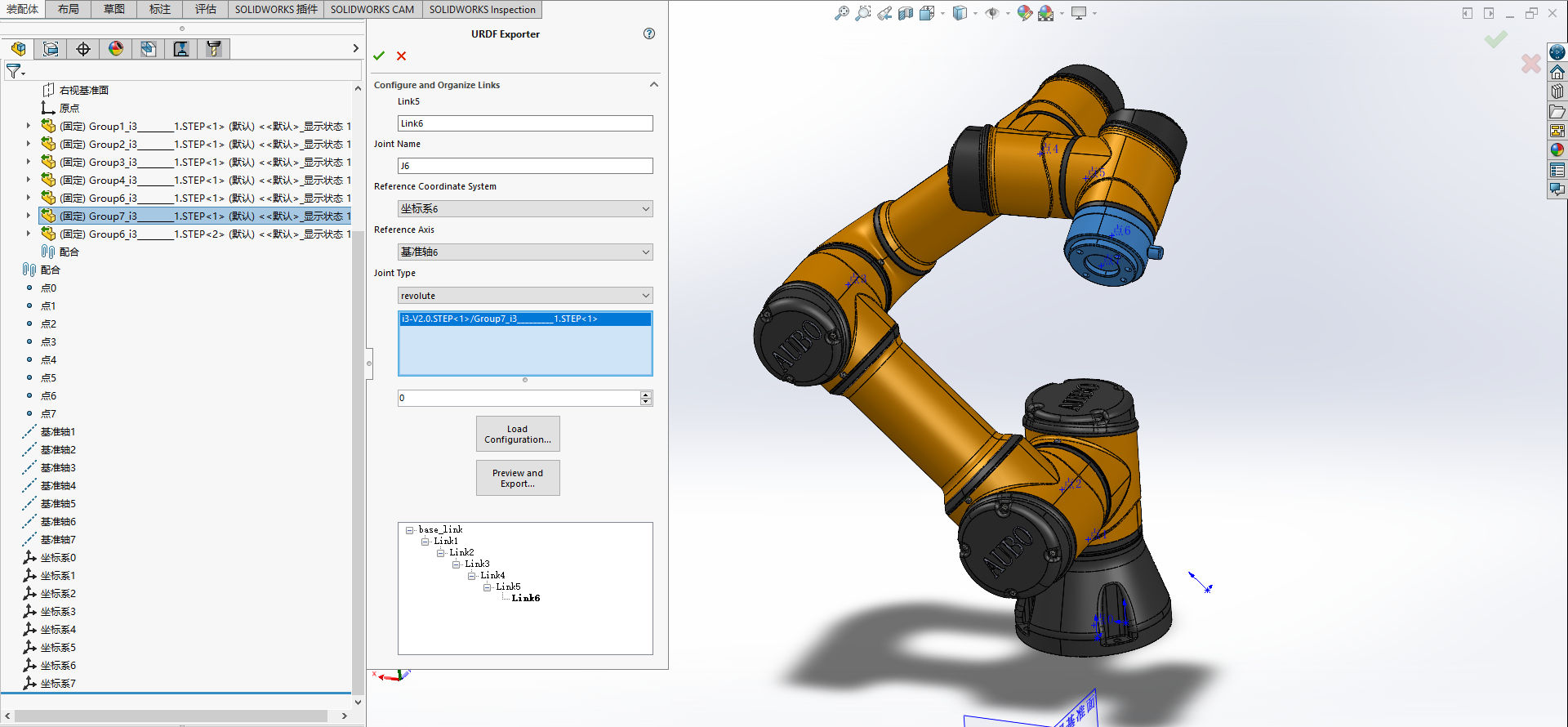
-
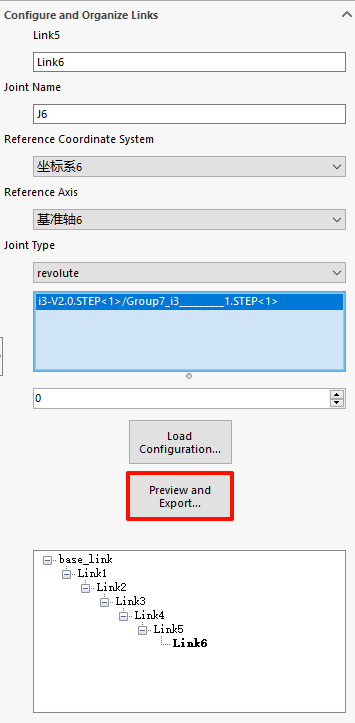
连杆设置完成后,点击Preview and Export。
-
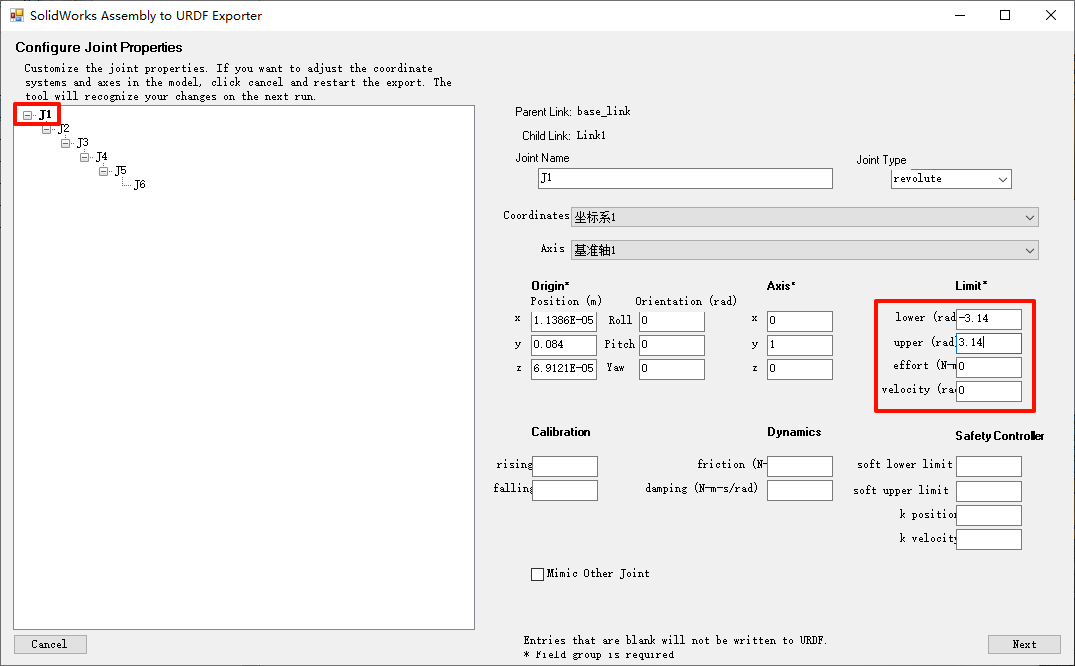
根据实际情况设置每个关节的限位等参数。设置完成后点击next。
-
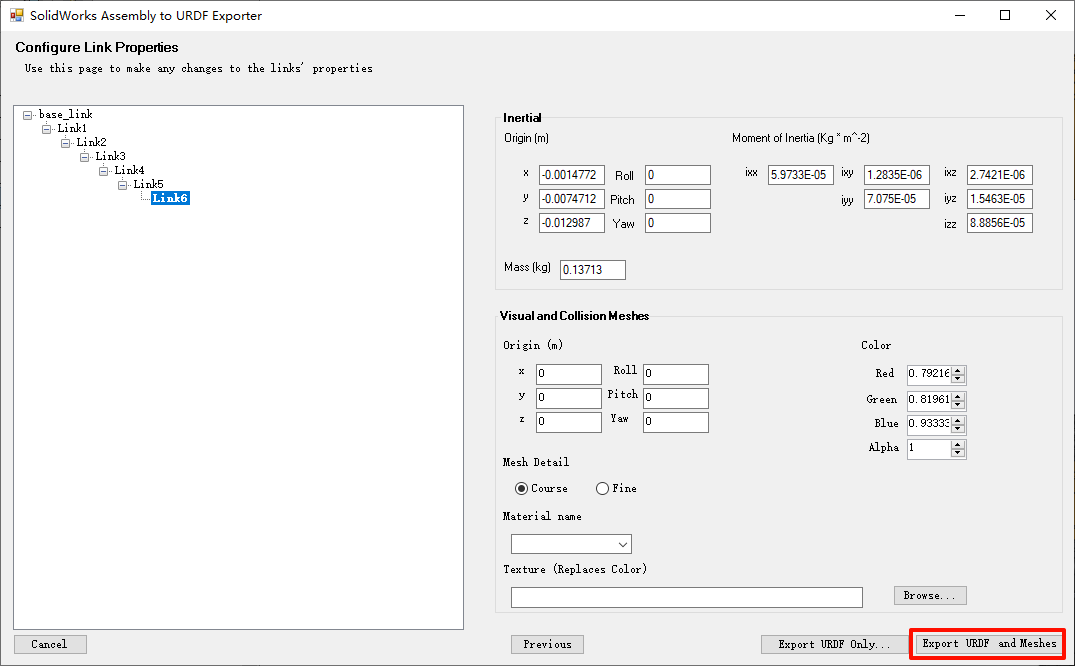
选择Export URDF and Meshes。
-
设置导出结果保存路径。
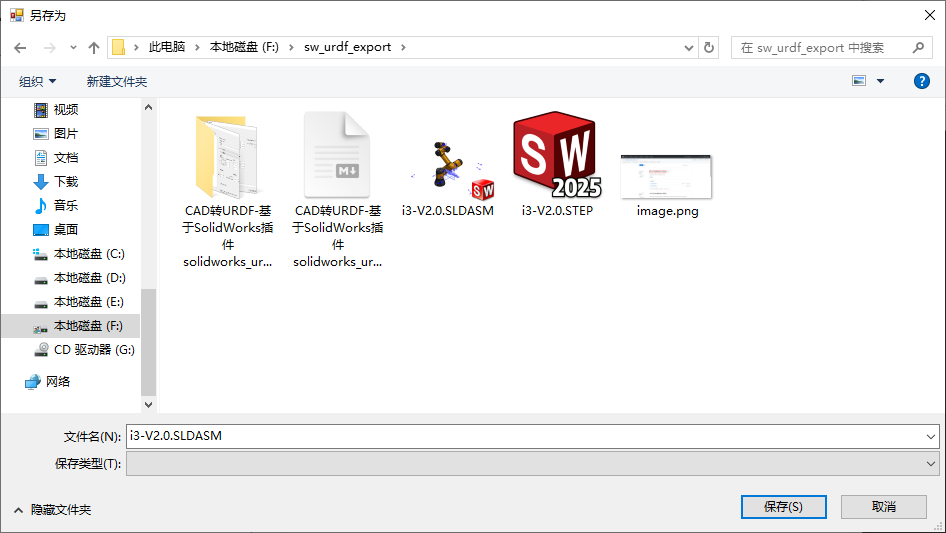
-
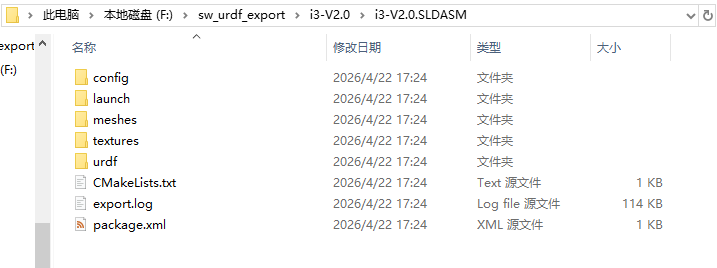
导出完成。
-
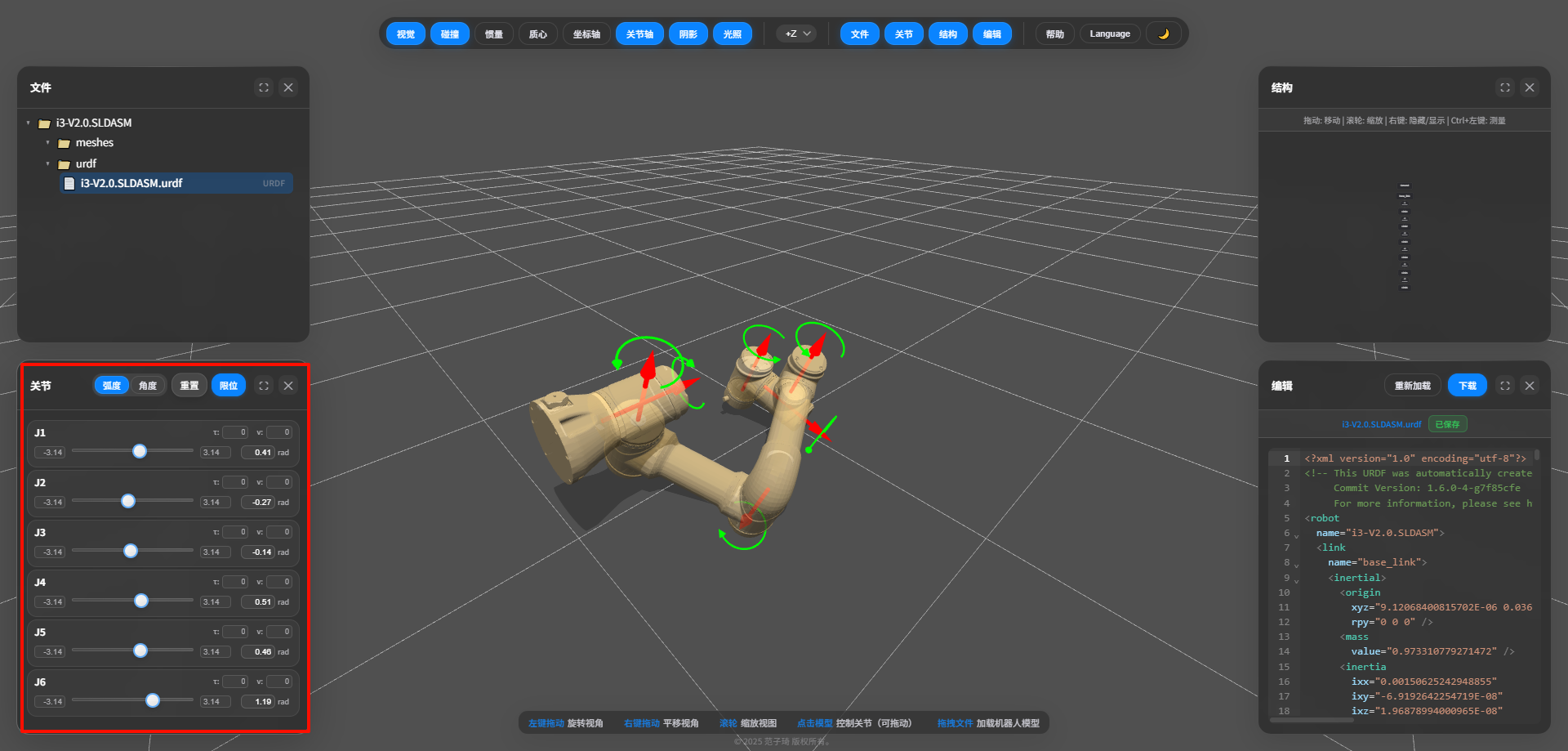
3 查看 URDF
-
用浏览器打开urdf.robotsfan.com
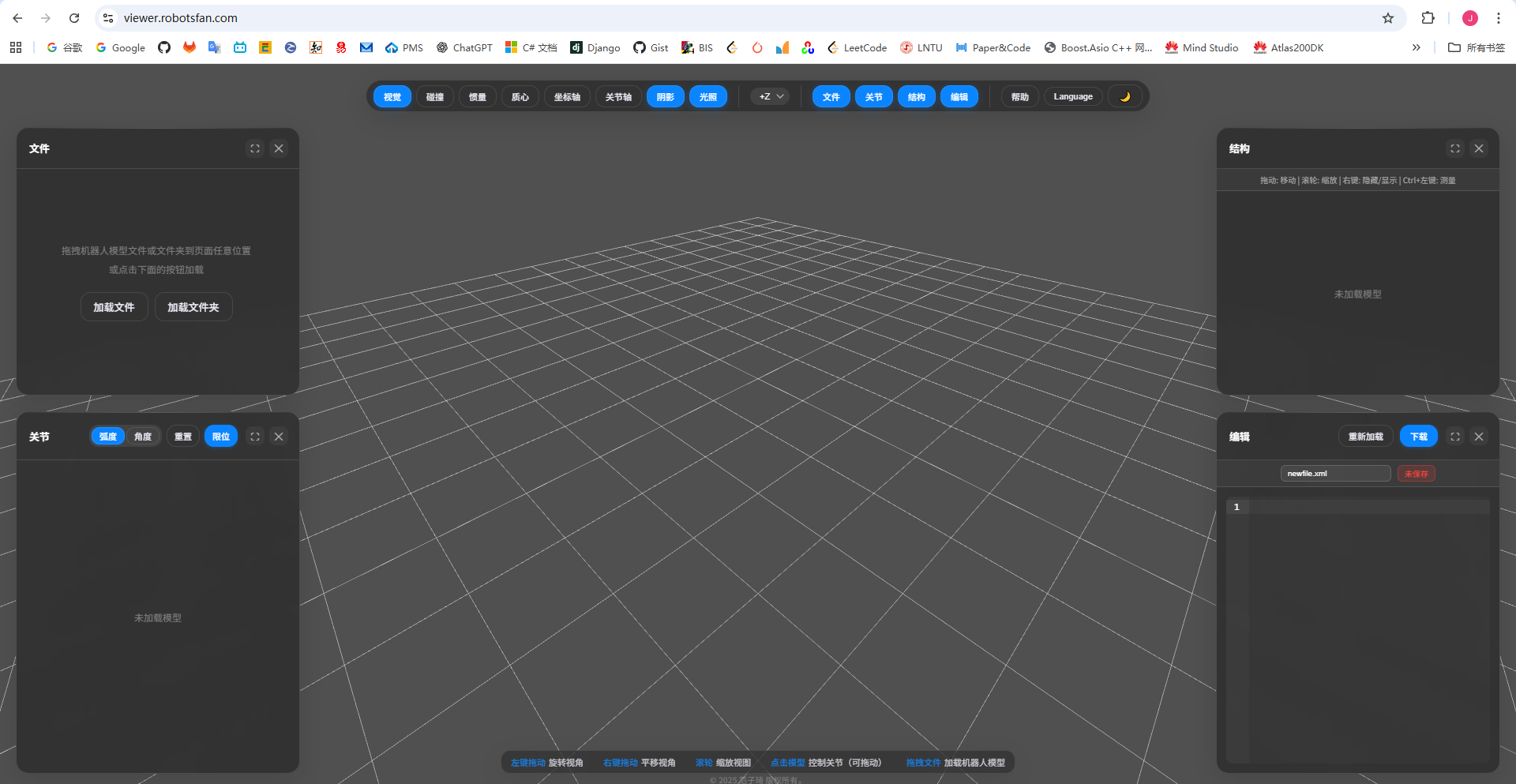
-
将导出文件拖入到窗口
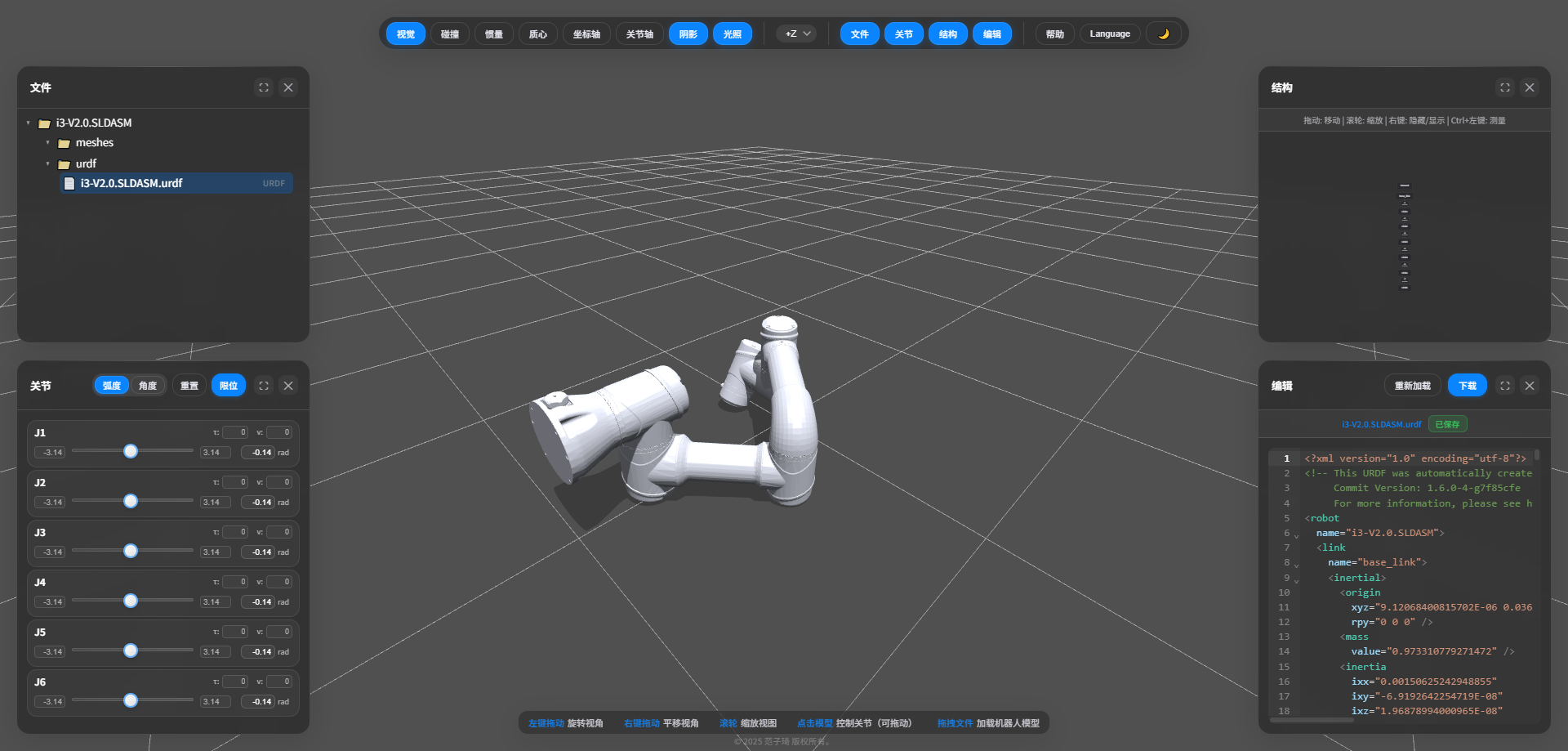
-
控制关节转动,验证关节配置是否正确。
4 导入到Isaac Sim
-
由于导出的urdf中对mash的引用采用的是如下形式:
<mesh filename="package://i3-V2.0.SLDASM/meshes/base_link.STL" />Isaac Sim无法识别package,所以需要将mesh的路径修改为相对路径。
-
用VSCode打开urdf文件,将所有的
package://i3-V2.0.SLDASM替换为..,并保存。 -
打开Isaac Sim。
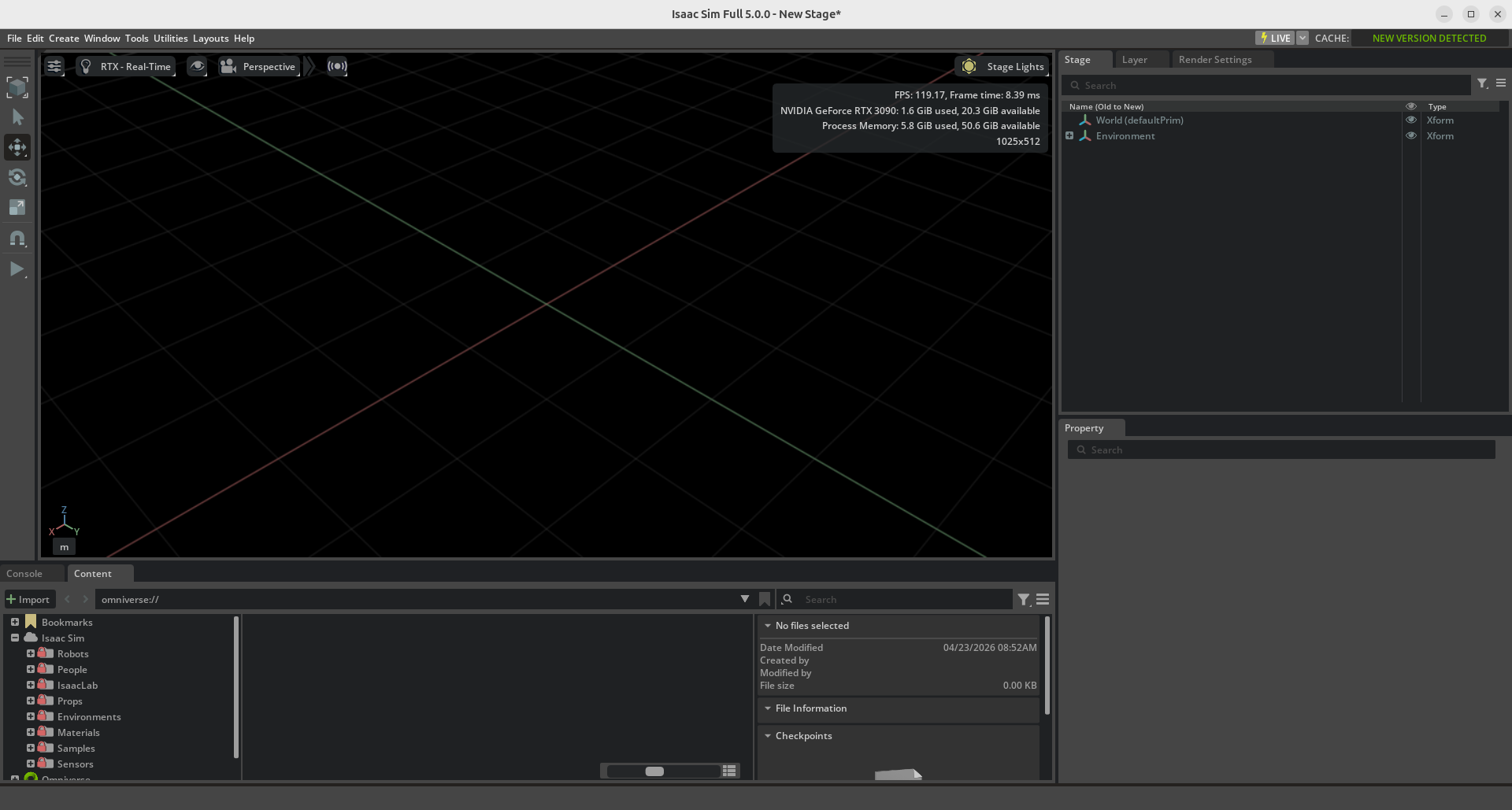
-
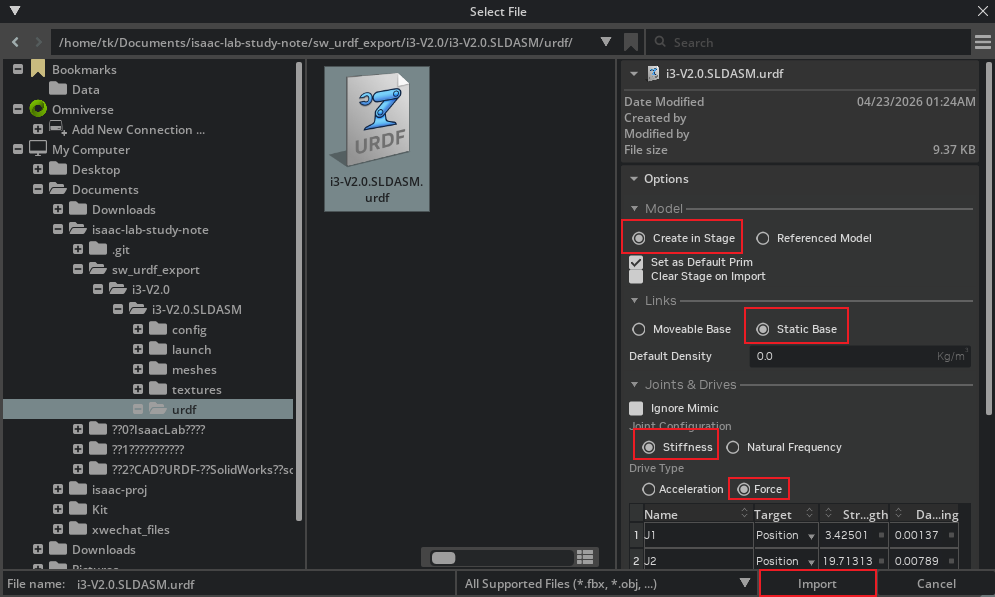
File->Import,打开导入窗口。
- Model:选择Create in Stage
- Links:由于是机械臂,选择StaticBase
- Joints&Drives:Joint Configuration选择Stiffness,Driver Type选择Force
- 勾选Allow Self-Collision,启用自碰撞,否则
配置完成后,点击Import导入
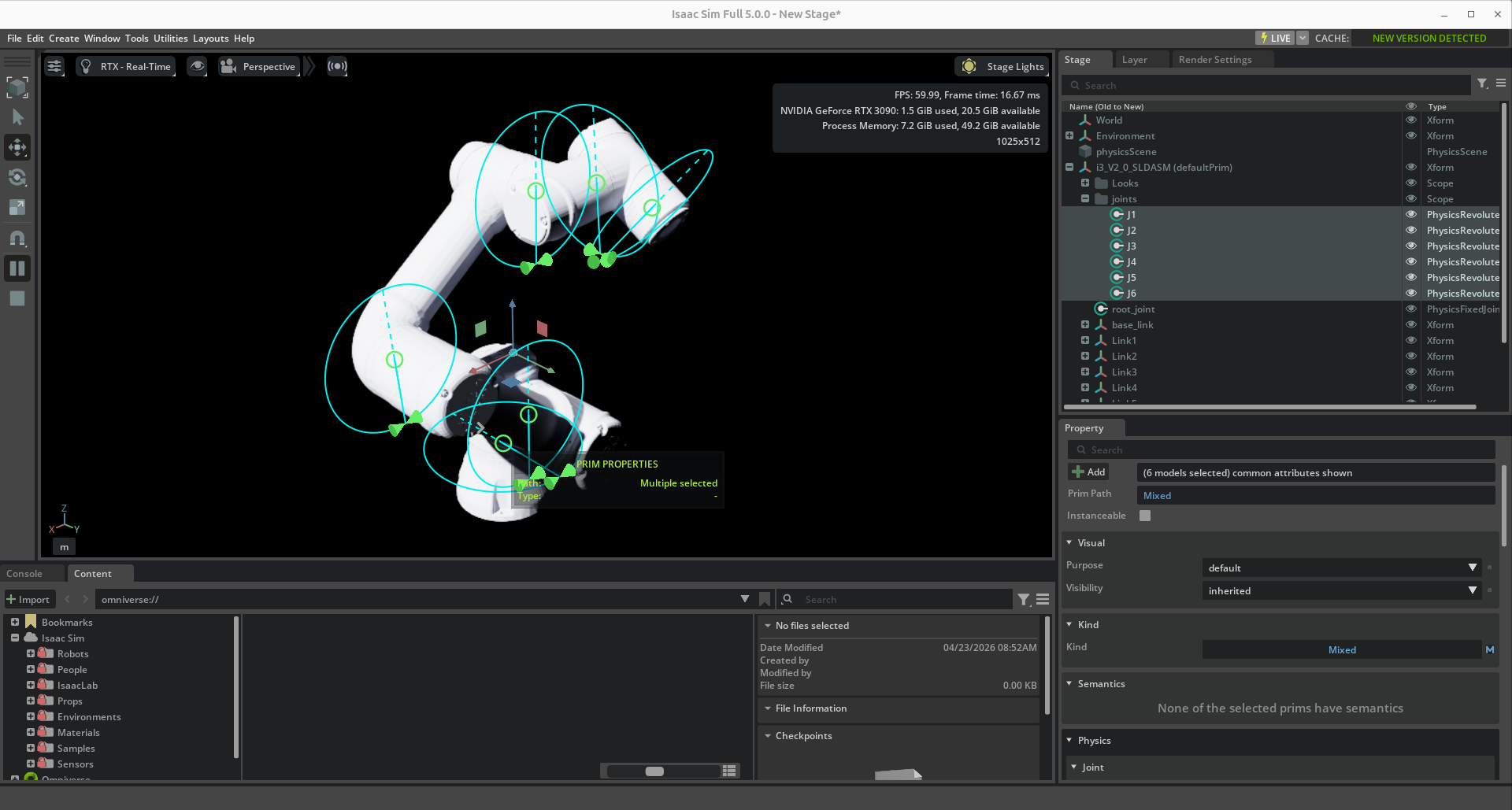
-
导入成功后点击Play,选中关节,即可控制机器人运动。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐
 12
12 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)