自监督学习时空纠缠Transformer交通流预测
关于自监督学习时空纠缠Transformer交通流预测的论文。
论文基本信息
| 项目 | 内容 |
|---|---|
| 标题 | SSL-STMFormer: Self-Supervised Learning Spatio-Temporal Entanglement Transformer for Traffic Flow Prediction |
| 作者 | 李泽涛、胡正、韩鹏(通讯作者)、顾宇、蔡世民 |
| 单位 | 电子科技大学,成都 |
| 会议 | AAAI-25 (The Thirty-Ninth AAAI Conference on Artificial Intelligence) |
| 页码 | 12130-12138 |
研究背景与核心问题
交通流预测的重要性
快速城市化和人口增长导致城市交通管理面临严峻挑战:交通拥堵、出行时间增加、空气污染。准确的交通流预测对缓解这些问题至关重要。
现有方法的三大核心局限
1. 长距离长时间纠缠捕获不足
- 交通系统存在长距离长时间纠缠:相距遥远的节点可能在特定时段表现出相似交通模式
- 案例(图1):旧金山国际机场(Node A)、奥克兰国际机场(Node B)、Bernal Heights(Node C)
- 7/10-7/13:三处交通流趋势高度相似
- 7/14-7/17:相似性急剧下降
- 现有静态建模方法无法有效捕捉这种动态变化
2. 时空异质性建模不足
- 城市区域功能分割导致不同区域交通模式差异显著
- 即使相距遥远的两个位置也可能因功能相似(如商业区、住宅区)而表现出相似交通模式
- 这种相似性同样随时间动态变化
3. 时空纠缠的静态建模缺陷
- 时空依赖性和异质性因出行模式变化而动态演变
- 现有方法以预定义/静态方式建模,无法捕捉真实交通环境的动态特性
- GNN的过平滑问题进一步阻碍动态长期依赖的捕获
核心创新:SSL-STMFormer架构
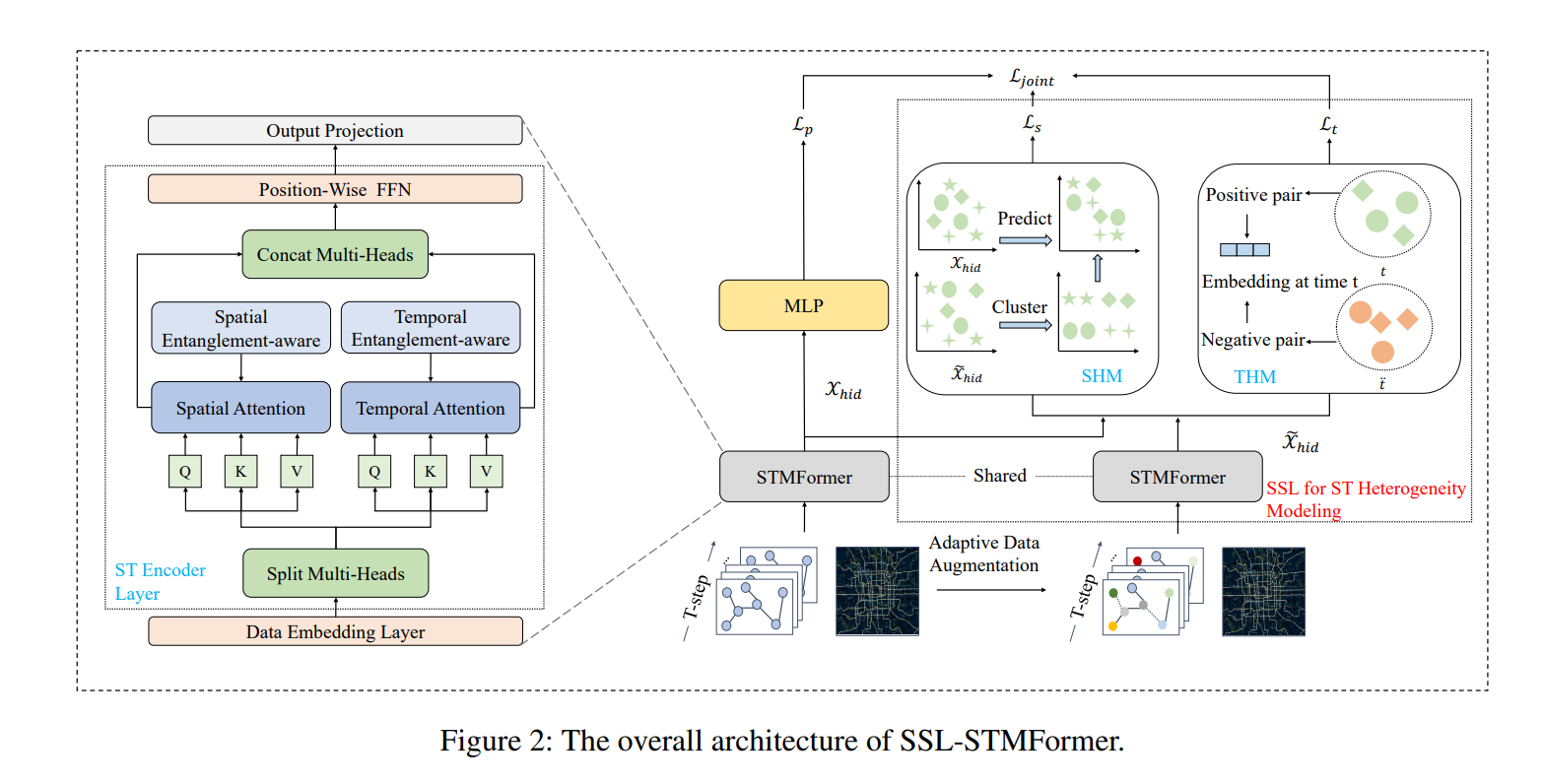
整体框架(图2)
┌─────────────────────────────────────────────────────────────────┐
│ 输入数据嵌入层 │
│ X_emb = X_data + X_spe(图拉普拉斯) + X_w(周周期) + X_d(日周期) + X_tpe │
├─────────────────────────────────────────────────────────────────┤
│ 时空编码器层 (ST Encoder Layer) │
│ ┌─────────────────────────┐ ┌─────────────────────────┐ │
│ │ 空间注意力模块 (SA) │ │ 时间注意力模块 (TA) │ │
│ │ • 短程掩码 M_short │ │ • 随机掩码 M_rand │ │
│ │ • 长程掩码 M_long (DTW) │ │ • 管道掩码 M_tube │ │
│ │ • 随机掩码 M_rand │ │ • 块掩码 M_block │ │
│ │ • 管道掩码 M_tube │ │ • 时间掩码 M_temp │ │
│ │ • 块掩码 M_block │ │ │ │
│ └─────────────────────────┘ └─────────────────────────┘ │
│ ↓ ↓ │
│ 空间纠缠感知模块 时间纠缠感知模块 │
│ (Spatial Entanglement-Aware) (Temporal Entanglement-Aware) │
├─────────────────────────────────────────────────────────────────┤
│ 多头注意力融合 (Concat Multi-Heads) │
│ STA = cat(Z^SRand, Z^STube, Z^SBlock, Z^Short, Z^Long, │
│ Z^TRand, Z^TTube, Z^TBlock, Z^Temp, Z^T) · W^l │
├─────────────────────────────────────────────────────────────────┤
│ 逐位置前馈网络 (Position-Wise FFN) + 输出投影 (Output Projection) │
├─────────────────────────────────────────────────────────────────┤
│ 自监督学习分支 (SSL Branch) │
│ ┌─────────────────────────┐ ┌─────────────────────────┐ │
│ │ 空间异质性建模 (SHM) │ │ 时间异质性建模 (THM) │ │
│ │ • 软聚类自监督任务 │ │ • 正/负样本对比学习 │ │
│ │ • 区域功能识别 │ │ • 时间步判别 │ │
│ └─────────────────────────┘ └─────────────────────────┘ │
│ L_joint = L_p(预测损失) + L_s(SHM损失) + L_t(THM损失) │
└─────────────────────────────────────────────────────────────────┘
核心模块详解
模块一:数据嵌入层
多维度嵌入融合:
Xemb=Xdata+Xspe+Xw+Xd+Xtpe\mathbf{X}_{emb} = \mathbf{X}_{data} + \mathbf{X}_{spe} + \mathbf{X}_{w} + \mathbf{X}_{d} + \mathbf{X}_{tpe}Xemb=Xdata+Xspe+Xw+Xd+Xtpe
| 嵌入类型 | 维度 | 功能 |
|---|---|---|
| 数据嵌入 Xdata\mathbf{X}_{data}Xdata | RT×N×d\mathbb{R}^{T \times N \times d}RT×N×d | 原始交通流数据经全连接层转换 |
| 空间图拉普拉斯嵌入 Xspe\mathbf{X}_{spe}Xspe | RN×d\mathbb{R}^{N \times d}RN×d | 基于图拉普拉斯特征向量,描述节点间距离信息 |
| 周周期嵌入 Xw\mathbf{X}_{w}Xw | RT×d\mathbb{R}^{T \times d}RT×d | 捕捉每周周期性(周一到周日) |
| 日周期嵌入 Xd\mathbf{X}_{d}Xd | RT×d\mathbb{R}^{T \times d}RT×d | 捕捉每日周期性(1-1440分钟) |
| 时间位置编码 Xtpe\mathbf{X}_{tpe}Xtpe | RT×d\mathbb{R}^{T \times d}RT×d | 标准Transformer位置编码 |
矩阵加法通过维度复制实现。
模块二:时空编码器层
2.1 空间注意力模块 (Spatial Attention, SA)
标准自注意力:
Qt(S)=Xt::WQS,Kt(S)=Xt::WKS,Vt(S)=Xt::WVS\mathbf{Q}_t^{(S)} = \mathbf{X}_{t::}\mathbf{W}_Q^S, \quad \mathbf{K}_t^{(S)} = \mathbf{X}_{t::}\mathbf{W}_K^S, \quad \mathbf{V}_t^{(S)} = \mathbf{X}_{t::}\mathbf{W}_V^SQt(S)=Xt::WQS,Kt(S)=Xt::WKS,Vt(S)=Xt::WVS
At(S)=(Qt(S))(Kt(S))⊤d′\mathbf{A}_t^{(S)} = \frac{(\mathbf{Q}_t^{(S)})(\mathbf{K}_t^{(S)})^\top}{\sqrt{d'}}At(S)=d′(Qt(S))(Kt(S))⊤
SA(Qt(S),Kt(S),Vt(S))=F(At(S))Vt(S)\text{SA}(\mathbf{Q}_t^{(S)}, \mathbf{K}_t^{(S)}, \mathbf{V}_t^{(S)}) = F(\mathbf{A}_t^{(S)})\mathbf{V}_t^{(S)}SA(Qt(S),Kt(S),Vt(S))=F(At(S))Vt(S)
关键洞察:空间依赖在不同时间片动态变化,SA模块专门捕捉这些动态空间依赖。
2.2 空间纠缠感知模块 (Spatial Entanglement-Aware)
核心思想:并非所有节点对都重要,需要识别关键节点对(邻近节点对 + 远距离相似节点对)
五种掩码策略:
| 掩码策略 | 数学表达 | 目标 |
|---|---|---|
| 随机掩码 Mrand\mathbf{M}_{rand}Mrand | RandSA=F(At(S)⊙Mrand(S))Vt(S)\text{RandSA} = F(\mathbf{A}_t^{(S)} \odot \mathbf{M}_{rand}^{(S)})\mathbf{V}_t^{(S)}RandSA=F(At(S)⊙Mrand(S))Vt(S) | 捕捉细粒度时空关系(类似MAE) |
| 管道掩码 Mtube\mathbf{M}_{tube}Mtube | TubeSA=F(At(S)⊙Mtube(S))Vt(S)\text{TubeSA} = F(\mathbf{A}_t^{(S)} \odot \mathbf{M}_{tube}^{(S)})\mathbf{V}_t^{(S)}TubeSA=F(At(S)⊙Mtube(S))Vt(S) | 增强空间外推能力(模拟传感器故障) |
| 块掩码 Mblock\mathbf{M}_{block}Mblock | BlockSA=F(At(S)⊙Mblock(S))Vt(S)\text{BlockSA} = F(\mathbf{A}_t^{(S)} \odot \mathbf{M}_{block}^{(S)})\mathbf{V}_t^{(S)}BlockSA=F(At(S)⊙Mblock(S))Vt(S) | 增强空间可迁移性 |
| 短程掩码 Mshort\mathbf{M}_{short}Mshort | ShortSA=F(At(S)⊙Mshort)Vt(S)\text{ShortSA} = F(\mathbf{A}_t^{(S)} \odot \mathbf{M}_{short})\mathbf{V}_t^{(S)}ShortSA=F(At(S)⊙Mshort)Vt(S) | 距离<λ跳的节点权重为1 |
| 长程掩码 Mlong\mathbf{M}_{long}Mlong | LongSA=F(At(S)⊙Mlong)Vt(S)\text{LongSA} = F(\mathbf{A}_t^{(S)} \odot \mathbf{M}_{long})\mathbf{V}_t^{(S)}LongSA=F(At(S)⊙Mlong)Vt(S) | DTW相似度Top-K节点权重为1 |
短程掩码构建:
- 若两节点图距离(跳数)< 阈值λ,则权重为1,否则为0
长程掩码构建(Dynamic Time Warping, DTW):
- 用DTW算法计算节点间历史交通流相似度
- 对每个节点,识别K个最相似节点作为长程邻居
- 当前节点与长程邻居间权重设为1,其余为0
Hadamard积 ⊙\odot⊙ 实现掩码与注意力分数的逐元素相乘。
2.3 时间注意力模块 (Temporal Attention, TA)
节点级时间自注意力:
Qn(T)=X:n:WQT,Kn(T)=X:n:WKT,Vn(T)=X:n:WVT\mathbf{Q}_n^{(T)} = \mathbf{X}_{:n:}\mathbf{W}_Q^T, \quad \mathbf{K}_n^{(T)} = \mathbf{X}_{:n:}\mathbf{W}_K^T, \quad \mathbf{V}_n^{(T)} = \mathbf{X}_{:n:}\mathbf{W}_V^TQn(T)=X:n:WQT,Kn(T)=X:n:WKT,Vn(T)=X:n:WVT
An(T)=(Qn(T))(Kn(T))⊤d′\mathbf{A}_n^{(T)} = \frac{(\mathbf{Q}_n^{(T)})(\mathbf{K}_n^{(T)})^\top}{\sqrt{d'}}An(T)=d′(Qn(T))(Kn(T))⊤
TA(Qn(T),Kn(T),Vn(T))=F(An(T))Vn(T)\text{TA}(\mathbf{Q}_n^{(T)}, \mathbf{K}_n^{(T)}, \mathbf{V}_n^{(T)}) = F(\mathbf{A}_n^{(T)})\mathbf{V}_n^{(T)}TA(Qn(T),Kn(T),Vn(T))=F(An(T))Vn(T)
2.4 时间纠缠感知模块 (Temporal Entanglement-Aware)
四种掩码策略:
- 随机掩码、管道掩码、块掩码(同空间模块)
- 时间掩码 Mtemp\mathbf{M}_{temp}Mtemp:专门设计,遮蔽未来数据,强制模型仅基于历史信息重建未来交通状况
TempTA=F(At(S)⊙Mtemp)Vt(S)\text{TempTA} = F(\mathbf{A}_t^{(S)} \odot \mathbf{M}_{temp})\mathbf{V}_t^{(S)}TempTA=F(At(S)⊙Mtemp)Vt(S)
目标:增强模型从历史到未来的时间依赖捕获能力,感知时间纠缠。
2.5 多头注意力融合 (Multiple Attention Fusion)
STA=cat(Z1⋯hSRandSRand,Z1⋯hSTubeSTube,Z1⋯hSBlockSBlock,Z1⋯hshortshort,Z1⋯hlonglong,Z1⋯hTRandTRand,Z1⋯hTTubeTTube,Z1⋯hTBlockTBlock,Z1⋯htemptemp,Z1⋯htt)Wl\text{STA} = \text{cat}\left(Z_{1\cdots h_{SRand}}^{SRand}, Z_{1\cdots h_{STube}}^{STube}, Z_{1\cdots h_{SBlock}}^{SBlock}, Z_{1\cdots h_{short}}^{short}, Z_{1\cdots h_{long}}^{long}, Z_{1\cdots h_{TRand}}^{TRand}, Z_{1\cdots h_{TTube}}^{TTube}, Z_{1\cdots h_{TBlock}}^{TBlock}, Z_{1\cdots h_{temp}}^{temp}, Z_{1\cdots h_t}^t\right) \mathbf{W}^lSTA=cat(Z1⋯hSRandSRand,Z1⋯hSTubeSTube,Z1⋯hSBlockSBlock,Z1⋯hshortshort,Z1⋯hlonglong,Z1⋯hTRandTRand,Z1⋯hTTubeTTube,Z1⋯hTBlockTBlock,Z1⋯htemptemp,Z1⋯htt)Wl
- cat:拼接操作
- hhh:各注意力头的数量
- Wl\mathbf{W}^lWl:可学习投影矩阵
后续处理:位置级前馈网络 + 层归一化 + 残差连接
模块三:自适应数据增强
3.1 交通流增强 (Traffic Flow Augmentation)
核心思想:基于学习的时间感知交通模式依赖,遮蔽低相关性的交通流量
掩码概率:
ρτ,n∼Ber(1−pτ,n)\rho_{\tau,n} \sim \text{Ber}(1-p_{\tau,n})ρτ,n∼Ber(1−pτ,n)
- ρτ,n\rho_{\tau,n}ρτ,n 越高 → xτ,nx_{\tau,n}xτ,n 越可能被遮蔽(该时间步与该区域整体交通规律相关性低)
- 降低噪声扰动影响
3.2 道路网络增强 (Road Network Augmentation)
- 缓解低互相关交通模式区域连接的偏差
- 捕获全局城市背景下的长程区域依赖
模块四:自监督学习——时空异质性建模
4.1 空间异质性建模 (SHM, Spatial Heterogeneity Modeling)
核心思想:通过软聚类自监督任务,使区域嵌入捕捉空间异质性
步骤:
-
区域投影到多个潜在表示空间(对应不同城市功能:住宅区、商业区等)
-
生成K个聚类嵌入 {c1,…,cK}\{c_1, \ldots, c_K\}{c1,…,cK}
-
聚类关联分数计算:
z~i,n,k=ck⊤h~i,n\tilde{z}_{i,n,k} = \mathbf{c}_k^\top \tilde{\mathbf{h}}_{i,n}z~i,n,k=ck⊤h~i,n
其中 h~i,n\tilde{\mathbf{h}}_{i,n}h~i,n 为增强数据编码的区域嵌入
- 自监督预测任务:基于原始网络编码的区域嵌入 hi,n\mathbf{h}_{i,n}hi,n 预测聚类分配
z^i,n,k=ck⊤hi,n\hat{z}_{i,n,k} = \mathbf{c}_k^\top \mathbf{h}_{i,n}z^i,n,k=ck⊤hi,n
- 损失函数(带温度参数γ\gammaγ的软聚类):
ℓ(hi,n,z~i,n)=−∑kz~i,n,klogexp(z^i,n,k/γ)∑jexp(z^i,n,j/γ)\ell(\mathbf{h}_{i,n}, \tilde{\mathbf{z}}_{i,n}) = -\sum_k \tilde{z}_{i,n,k} \log \frac{\exp(\hat{z}_{i,n,k}/\gamma)}{\sum_j \exp(\hat{z}_{i,n,j}/\gamma)}ℓ(hi,n,z~i,n)=−k∑z~i,n,klog∑jexp(z^i,n,j/γ)exp(z^i,n,k/γ)
LS=∑i=1t−T+1∑n=1Nℓ(hi,n,z~i,n)\mathcal{L}_S = \sum_{i=1}^{t-T+1} \sum_{n=1}^{N} \ell(\mathbf{h}_{i,n}, \tilde{\mathbf{z}}_{i,n})LS=i=1∑t−T+1n=1∑Nℓ(hi,n,z~i,n)
分布正则化策略:确保聚类结果反映城市空间区域特征的真实分布。
4.2 时间异质性建模 (THM, Temporal Heterogeneity Modeling)
核心思想:通过对比学习区分不同时间步的异质性
步骤:
-
融合原始与增强数据的时间维度嵌入:
vt,n=w1⊙ht,n+w2⊙h~t,n\mathbf{v}_{t,n} = \mathbf{w}_1 \odot \mathbf{h}_{t,n} + \mathbf{w}_2 \odot \tilde{\mathbf{h}}_{t,n}vt,n=w1⊙ht,n+w2⊙h~t,n -
城市级表示聚合:
st=σ(1N∑n=1Nvt,n)\mathbf{s}_t = \sigma\left(\frac{1}{N}\sum_{n=1}^{N} \mathbf{v}_{t,n}\right)st=σ(N1n=1∑Nvt,n) -
对比学习:
- 正样本对:同一时间步的区级嵌入 vt,n\mathbf{v}_{t,n}vt,n 与城市级嵌入 st\mathbf{s}_tst
- 负样本对:不同时间步的嵌入
-
损失函数(交叉熵形式):
LT=−∑n=1Nlogg(vt,n,st)−∑n=1Nlog(1−g(vt′,n,st))\mathcal{L}_T = -\sum_{n=1}^{N} \log g(\mathbf{v}_{t,n}, \mathbf{s}_t) - \sum_{n=1}^{N} \log(1-g(\mathbf{v}_{t',n}, \mathbf{s}_t))LT=−n=1∑Nlogg(vt,n,st)−n=1∑Nlog(1−g(vt′,n,st))
其中 g(vt,n,st)=σ(vt,n⊤W3st)g(\mathbf{v}_{t,n}, \mathbf{s}_t) = \sigma(\mathbf{v}_{t,n}^\top \mathbf{W}_3 \mathbf{s}_t)g(vt,n,st)=σ(vt,n⊤W3st),W3\mathbf{W}_3W3 为可学习变换矩阵。
联合损失函数
Ljoint=Lp+Ls+Lt\mathcal{L}_{joint} = \mathcal{L}_p + \mathcal{L}_s + \mathcal{L}_tLjoint=Lp+Ls+Lt
| 损失项 | 公式 | 功能 |
|---|---|---|
| 预测损失 Lp\mathcal{L}_pLp | MSE(xt+1,t+T′,x^t+1,t+T′)\text{MSE}(\mathbf{x}_{t+1,t+T'}, \hat{\mathbf{x}}_{t+1,t+T'})MSE(xt+1,t+T′,x^t+1,t+T′) | 主任务:交通流预测 |
| 空间异质性损失 Ls\mathcal{L}_sLs | 软聚类交叉熵 | 自监督:区域功能识别 |
| 时间异质性损失 Lt\mathcal{L}_tLt | 对比学习交叉熵 | 自监督:时间步判别 |
实验验证
数据集(6个真实世界数据集)
| 数据集 | 类型 | 节点数 | 边数 | 时间步 | 间隔 | 时间范围 |
|---|---|---|---|---|---|---|
| PeMS04 | 图-高速公路 | 307 | 340 | 16,992 | 5min | 2018/01-02 |
| PeMS07 | 图-高速公路 | 883 | 866 | 28,224 | 5min | 2017/05-08 |
| PeMS08 | 图-高速公路 | 170 | 295 | 17,856 | 5min | 2016/07-08 |
| NYCTaxi | 网格-城市 | 75 (15×5) | 484 | 17,520 | 30min | 2014全年 |
| CHIBike | 网格-城市 | 270 (15×18) | 1,966 | 4,416 | 30min | 2020/07-09 |
| T-Drive | 网格-城市 | 1,024 (32×32) | 7,812 | 3,600 | 60min | 2015/02-06 |
基准模型(19个)
| 类别 | 模型 |
|---|---|
| 网格模型 | STResNet, DMVSTNet, DSAN |
| 图神经网络 | DCRNN, STGCN, GWNET, MTGNN, STSGCN, STFGNN, STGODE, STGNCDE |
| 自注意力模型 | STTN, GMAN, TFormer, PDFormer, ASTGNN |
| 自监督/预训练 | ST-SSL, GraphST, STD-MAE |
核心实验结果
图数据集结果(表2)
| 模型 | PeMS04 (MAE/MAPE/RMSE) | PeMS07 (MAE/MAPE/RMSE) | PeMS08 (MAE/MAPE/RMSE) |
|---|---|---|---|
| DCRNN | 22.73/14.75/36.57 | 23.63/12.28/36.51 | 18.18/11.23/28.17 |
| STGCN | 21.75/13.87/34.76 | 22.89/11.98/35.44 | 17.83/11.21/27.12 |
| GWNET | 19.35/13.30/31.71 | 21.22/9.07/34.11 | 15.06/9.51/24.85 |
| MTGNN | 19.07/12.96/31.56 | 20.82/9.03/34.08 | 15.39/10.17/24.93 |
| PDFormer | 18.32/12.10/29.96 | 19.83/8.52/32.87 | 13.58/9.04/23.50 |
| ST-SSL | 18.56/12.74/31.01 | 20.36/9.64/33.98 | 14.73/10.05/24.49 |
| STD-MAE* | 17.80/12.07/29.25 | 18.65/8.47/31.71 | 13.44/8.98/22.47 |
| SSL-STMFormer | 17.06/11.32/28.11 | 18.53/8.41/31.44 | 12.05/8.11/20.15 |
| 提升幅度 | 4.15%/6.21%/3.89% | 0.64%/0.70%/0.85% | 10.34%/9.68%/10.32% |
平均提升:MAE 5.04%,MAPE 5.53%,RMSE 5.02%
网格数据集结果(表3)
| 模型 | NYCTaxi (In/Out) | T-Drive (In/Out) | CHIBike (In/Out) |
|---|---|---|---|
| STResNet | 14.49/12.79 | 19.63/19.61 | 4.76/4.62 |
| PDFormer | 13.15/11.57 | 17.83/17.74 | 3.95/3.83 |
| ST-SSL | 12.97/9.78 | 16.21/16.69 | 4.03/3.94 |
| GraphST | 11.67/10.79 | 15.97/15.84 | 4.01/3.86 |
| STD-MAE* | 10.71/9.53 | 15.42/14.93 | 3.91/3.89 |
| SSL-STMFormer | 9.49/8.98 | 12.85/12.79 | 3.49/3.44 |
| 提升幅度 | 11.39%/8.50% | 10.34%/14.33% | 10.74%/10.18% |
平均提升:MAE 10.91%,MAPE 9.86%,RMSE 7.18%
消融实验(表4)
| 变体 | PeMS08 (MAE/MAPE/RMSE) | T-Drive In (MAE/MAPE/RMSE) | T-Drive Out (MAE/MAPE/RMSE) |
|---|---|---|---|
| w/o SSL(无自监督) | 13.70/9.16/23.30 | 14.14/10.76/30.90 | 14.15/10.69/30.92 |
| w/o EA(无纠缠感知) | 13.59/9.14/23.52 | 14.20/11.04/30.79 | 14.21/11.00/30.78 |
| w/o SEA(无空间纠缠) | 13.46/9.00/23.22 | 13.51/10.60/29.83 | 13.47/10.64/29.80 |
| w/o TEA(无时间纠缠) | 13.40/9.12/23.32 | 13.47/10.16/29.61 | 13.38/10.06/29.50 |
| w/ STEA(混合纠缠) | 13.86/9.31/23.61 | 13.65/10.89/29.90 | 13.60/10.82/29.83 |
| SSL-STMFormer | 12.05/8.11/20.15 | 12.85/9.68/29.10 | 12.79/9.60/29.00 |
关键发现:
| 结论 | 证据 |
|---|---|
| 混合时空掩码策略劣于分离策略 | w/STEA性能低于完整模型 |
| 移除任一纠缠模块均导致性能下降 | w/o SEA和w/o TEA均劣于完整模型 |
| SSL组件对捕捉时空异质性至关重要 | w/o SSL性能显著下降 |
| 掩码策略对识别关键节点对不可或缺 | 各掩码变体均验证其必要性 |
超参数敏感性分析(图3)
| 参数 | 搜索范围 | 最优值 | 观察 |
|---|---|---|---|
| 隐藏维度 d | {8, 16, 32, 64, 128} | 64 | 维度增加提升表达能力,但过大增加计算成本 |
| 编码器深度 | {2, 4, 6, 8, 10} | 6-8 | 深度增加提升复杂依赖建模,但过深导致过拟合 |
| 掩码比例 | {0.05, 0.1, 0.15, 0.2, 0.25} | 0.1-0.15 | 过低无法有效正则化,过高丢失关键信息 |
四篇文献的对比与关联
| 维度 | 第一篇(风电预测) | 第二篇(调度优化) | 第三篇(医疗-交通) | 第四篇(交通预测) |
|---|---|---|---|---|
| 会议/期刊 | IEEE TSTE | IEEE TSTE | CAAI Trans | AAAI-25 |
| 核心问题 | 风电功率预测精度 | 风电不确定性量化 | 医疗-交通融合预测 | 交通流动态预测 |
| 技术范式 | 数据驱动+物理知识嵌入 | 深度学习+DRO优化 | 生成式AI+多尺度Transformer | 自监督学习+时空纠缠Transformer |
| 注意力机制 | 多尺度空间+时间 | 多教师知识蒸馏 | 医疗区域+应急路径 | 多掩码空间+时间注意力融合 |
| 自监督/对比学习 | 无 | 无 | 无 | 有(SHM+THM) |
| 掩码策略 | 无 | 无 | 无 | 随机/管道/块/短程/长程/时间 |
| 异质性建模 | 误差分布形状损失 | JSD模糊集 | 多尺度门控融合 | 时空软聚类+对比学习 |
| 核心创新 | 物理边界约束 | 增强模糊集 | 医疗感知嵌入 | 时空纠缠感知 |
| 损失函数 | MSE+边界+分布 | 预测+DRO | MAE+紧急损失 | MSE+聚类+对比 |
论文核心贡献总结
| 贡献 | 技术实现 | 效果 |
|---|---|---|
| 1. 时空注意力机制 | 动态捕获不同区域和时间步的依赖 | 增强复杂交通模式理解 |
| 2. 自监督学习任务 | 辅助模型捕捉交通数据底层结构 | 提升泛化能力 |
| 3. 时空纠缠感知模块 | 多种掩码策略感知动态交互 | 准确检测演变交通模式 |
| 4. 自适应数据增强 | 基于学习的时间感知依赖掩码 | 降低噪声,捕获长程依赖 |
| 5. 时空异质性建模 | 软聚类(SHM) + 对比学习(THM) | 区分区域功能,识别时间模式 |
关键方法论启示
1. 纠缠感知的核心思想
- 交通系统的时空依赖不是静态预定义的
- 通过多种掩码策略强制模型学习"哪些节点对/时间步是真正重要的"
- 短程掩码捕捉局部连通性,长程掩码(DTW)捕捉功能相似性
2. 自监督学习的双重作用
- SHM:通过区域功能聚类,使嵌入具有语义解释性(住宅区、商业区等)
- THM:通过时间步对比,强化同时间段内城市级模式的一致性
3. 从静态到动态的范式转变
- 传统GNN:预定义邻接矩阵,静态图结构
- SSL-STMFormer:动态注意力 + 自适应掩码,图结构随时间和数据演变

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐

 7
7 0
0- 0



 已为社区贡献11条内容
已为社区贡献11条内容

所有评论(0)