盘点3大建模方式:倾斜摄影、激光点云、高斯泼溅
工厂车间、产线设备、仓储物流……这些物理实体要“搬”进虚拟数字世界里,离不开三维重建技术。
目前主流的方式有三种:倾斜摄影、激光点云、高斯泼溅。
三种方法各有长短,但哪个最适合数字孪生工厂项目?我们今天一次说清楚。
01 倾斜摄影:大场景“航拍手”
倾斜摄影,简单说就是无人机挂个五镜头相机,在空中多角度拍照。

软件把照片自动拼接成连续的三维Mesh模型,带真实纹理,看起来像卫星地图的升级版。
优点很明显:
-
覆盖范围大,一次飞几十平方公里不是问题
-
带真实颜色纹理,肉眼看起来直观
-
自动化程度高,导入照片就能跑
但放在工厂项目里,缺点也很致命:
-
近距离细节差,设备铭牌、管道接口、螺栓……基本看不清
-
模型只是表面,内部结构无法表达
-
文件巨大,动辄几十GB,加载卡顿
-
受天气影响大,阴天、阴影区域容易出现破洞
适用场景:园区级宏观展示、厂区鸟瞰、土方量测算。
不适合:车间内部、设备级精细孪生。
02 激光点云:高精度“测绘仪”
激光点云,靠激光雷达(LiDAR)发射激光束,测量反射回来的距离,生成密密麻麻的坐标点。

点的数量从几十万到几十亿不等,每个点带XYZ坐标和反射强度,精度可达毫米级。
优点:
-
精度最高,误差1-2毫米
-
不受光照影响,黑暗环境也能扫
-
直接获取真实尺度,无需后期标定
缺点同样突出:
-
纯点云是“无色的”,需要额外相机贴纹理
-
数据量极大,一个车间轻松上亿点
-
后处理复杂:去噪、抽稀、三角化……需要专业软件和人工
-
设备贵,一台地面架站式LiDAR十几万起步
适用场景:精密测量、逆向工程、设备级高精度建模。
不适合:快速迭代、预算有限的中小工厂。
03 高斯泼溅:工厂孪生的“新黑马”
高斯泼溅(3D Gaussian Splatting)是近两年火起来的新技术,它不建三角网,而是用几十万到数百万个半透明椭球体拼出整个场景。
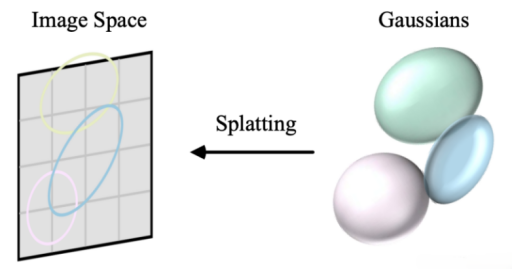
每个椭球都有自己的位置、大小、颜色、透明度。从任意角度渲染,都能实时生成高质量画面。
为什么适合数字孪生工厂?我们拆开看。
优势一:建模速度快
传统倾斜摄影或激光点云,从采集到可用模型,通常要几小时甚至几天。
高斯泼溅呢?拍一圈照片或视频,十几分钟就能生成可交互的3D场景。
对工厂项目来说,产线调整频繁,快速建模意味着可以随时更新孪生体,不用等外包团队排期。
优势二:细节与效率的平衡
激光点云精度高,但数据太重;倾斜摄影轻量,但细节糊。
高斯泼溅做到了中间路线:设备上的螺丝、管道上的阀门、甚至反光金属表面……都能高保真还原。
同时文件体积更小——相比传统Mesh模型,同等画质下文件压缩60%以上,加载速度快5倍。
优势三:支持动态场景
工厂里有运动设备:AGV小车、机械臂、传送带……
传统建模方法只能表达静态“快照”,而高斯泼溅的进阶版——4D高斯泼溅,可以重建动态过程。
这意味着你可以用它模拟产线运行、人员动线、物料流转,真正实现“活”的数字孪生。
优势四:采集门槛低
不需要几十万的激光雷达,也不怕阴天下雨。
一台扫描设备,围着设备或车间走一圈,拍几十到两百张照片,就能出活。一线工人、工艺工程师稍微培训都能上手采集。

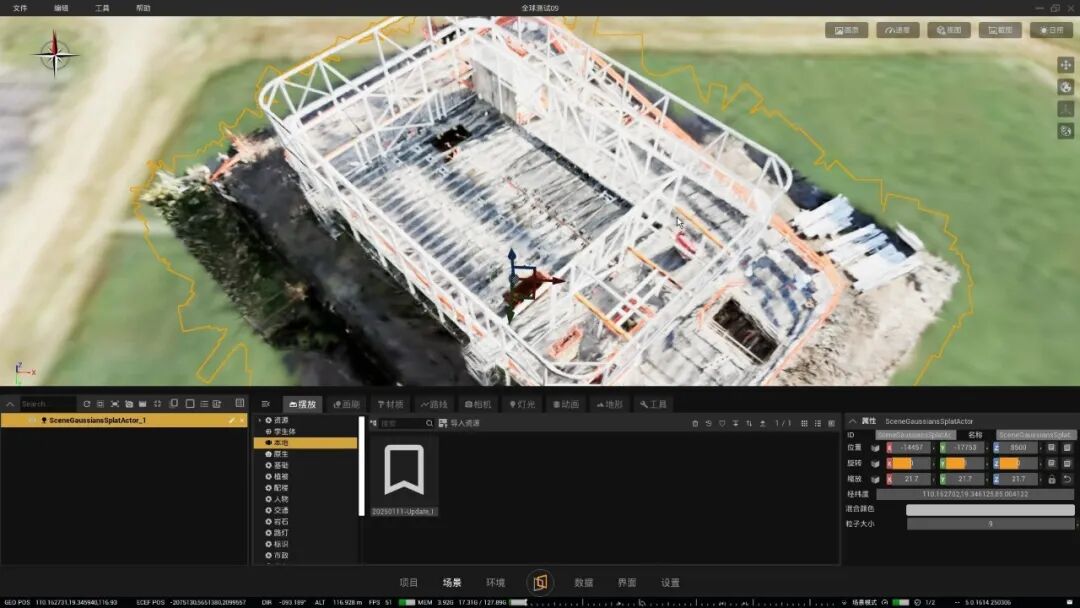
图源:其域创新官网
一个真实案例:宁夏某750千伏输变电工程,用高斯泼溅技术对铁塔和现场环境进行全景建模。结果:模型细节保真度提升40%,存储体积压缩60%,动态加载速度提高5倍。前期勘测周期从15天缩短到5天,成本降低20万元。
放在工厂场景里,这个账算下来非常划算。
04 对比总结:一张表看懂
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
结论很直接:
-
要看工厂整体布局?倾斜摄影够用。
-
要抄数逆向一个零件?激光点云无可替代。
-
要做可交互、可更新、可动态模拟的数字孪生工厂?高斯泼溅是最优解。
05 CIMPro孪大师:让高斯泼溅模型变成数字孪生应用
模型只是起点,真正的数字孪生工厂,要能接入数据、做分析、支持决策。
高斯泼溅模型怎么变成可交互的数字孪生应用?
CIMPro孪大师——上海漂视网络自主研发的零代码/低代码数字孪生开发平台,就是答案。

CIMPro孪大师支持导入各类GIS数据
-
无缝导入:支持高斯泼溅生成的 .ply等格式,无需额外转换
-
多源融合:在模型上叠加GIS地图、IoT传感器数据(PLC、Modbus、OPC UA)、视频流、数据库
-
零代码开发:拖拽式搭建厂区看板、设备状态监控、告警联动、历史回放
-
超写实渲染:PBR材质、光影特效,让高斯模型更逼真
-
多端发布:一键生成Web链接或EXE,PC、大屏都能看
一个典型的工作流:
-
用手持设备或无人机采集工厂数据(10分钟)
-
生成高斯泼溅模型(15分钟)
-
导入CIMPro孪大师(1分钟)
-
叠加设备台帐和实时数据(半天)
-
发布为Web数字孪生应用,分享给生产、设备、安全部门
从采集到上线,一天之内跑通一个车间级的数字孪生。这就是高斯泼溅 + CIMPro孪大师给智能制造行业带来的效率革命。
最后说两句:
三种建模方式没有绝对的好与坏,只有适合不适合。
如果你的工厂正在上数字孪生项目,别一上来就砸钱买激光雷达,也别只盯着倾斜摄影的“大场面”。
试试高斯泼溅,再配上CIMPro孪大师——低成本、高效率、真能用。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐



 6
6 0
0- 0



 已为社区贡献12条内容
已为社区贡献12条内容

所有评论(0)