SGAD-SLAM Jetson 部署指南
项目包:
「2026 SGAD-SLAM 部署项目」
/~4dff3YW018~:/
链接:https://pan.quark.cn/s/caa78d7aa678
环境信息
设备: Jetson Orin NX
内存: 15GB RAM + 7.5GB Swap
数据集: Replica room0 (2000 帧)
状态: ✅ 成功运行,无 OOM
1. conda 环境创建
conda create -n sgadslam python=3.8 -y conda activate sgadslam2. PyTorch 安装
编译安装
✅ 版本: torch==1.12.0a0, torchvision==0.13.0a0
可以用我编译好的
3. 基础依赖安装
pip install wandb trimesh==4.0.10 pytorch_msssim torchmetrics tqdm imageio==2.35.1 scipy plyfile roma einops matplotlib evo==1.11.04. Open3D + OpenCV
pip install open3d==0.18.0 pip install opencv-python==4.7.0.72
接下来需要编译安装( 相关包 也在项目链接里面)
5. faiss-gpu 编译安装
# 改为编译 GPU 版本 cd /home/jetson/aaa-Point-SLAM/faiss-1.7.2 export PATH=/home/jetson/aaa-Point-SLAM/cmake-3.25.1-linux-aarch64/bin:$PATH mkdir -p build && cd build cmake -DFAISS_ENABLE_GPU=ON -DFAISS_ENABLE_PYTHON=ON -DBUILD_TESTING=OFF -DBUILD_SHARED_LIBS=OFF -DCMAKE_BUILD_TYPE=Release .. make -j$(nproc) cd ../python pip install -e .
✅ faiss 1.7.2 GPU 版本编译成功
6. simple-knn 编译
cd ~/aaa-SGAD-SLAM/SGAD-SLAM-main/submodules/simple-knn sed -i 's/"sm_86",/"sm_86", "sm_8.7",/g' setup.py pip install -e .7. fast_gicp 编译
export PATH=/home/jetson/aaa-Point-SLAM/cmake-3.25.1-linux-aarch64/bin:$PATH pip install empy catkin_pkg rospkg cd ~/aaa-SGAD-SLAM/SGAD-SLAM-main/submodules/fast_gicp/build cmake .. -DCMAKE_BUILD_TYPE=Release make -j$(nproc) cd .. python setup.py install8. git 依赖安装
# 方式1: pip install git+ (网络不稳定) # 方式2: 下载后本地安装 pip install -e /home/jetson/aaa-SGAD-SLAM/evaluate_3d_reconstruction_lib-main pip install -e /home/jetson/aaa-SGAD-SLAM/gaussian_rasterizer_smallerGSradii-master9. rerun 安装
# 新版 rerun 不支持 Python 3.8 pip install 'rerun-sdk==0.16.0'
📂 数据集准备
Replica 数据集整理
/home/jetson/aaa-SGAD-SLAM/Replica-room0/
├── images/ # RGB: frame_0.jpg, frame_1.jpg, ...
├── depth_images/ # 深度: depth_0.png, depth_1.png, ...
└── traj.txt
## 📦 依赖版本清单 | 依赖 | 版本 | 状态 | | -------------------------- | ------------ | ---- | | torch | 1.12.0a0 | ✅ | | torchvision | 0.13.0a0 | ✅ | | numpy | 1.24.4 | ✅ | | open3d | 0.18.0 | ✅ | | opencv-python | 4.7.0 | ✅ | | faiss | 1.7.2 (GPU) | ✅ | | simple-knn | 0.0.0 (编译) | ✅ | | pygicp | 0.0.1 (编译) | ✅ | | gaussian_rasterizer | - (编译) | ✅ | | evaluate_3d_reconstruction | - | ✅ | | rerun-sdk | 0.16.0 | ✅ | --- ##修改数据集路径
configs_map/Replica/room0.yaml
input_path: /home/jetson/aaa-SGAD-SLAM/Replica-room0
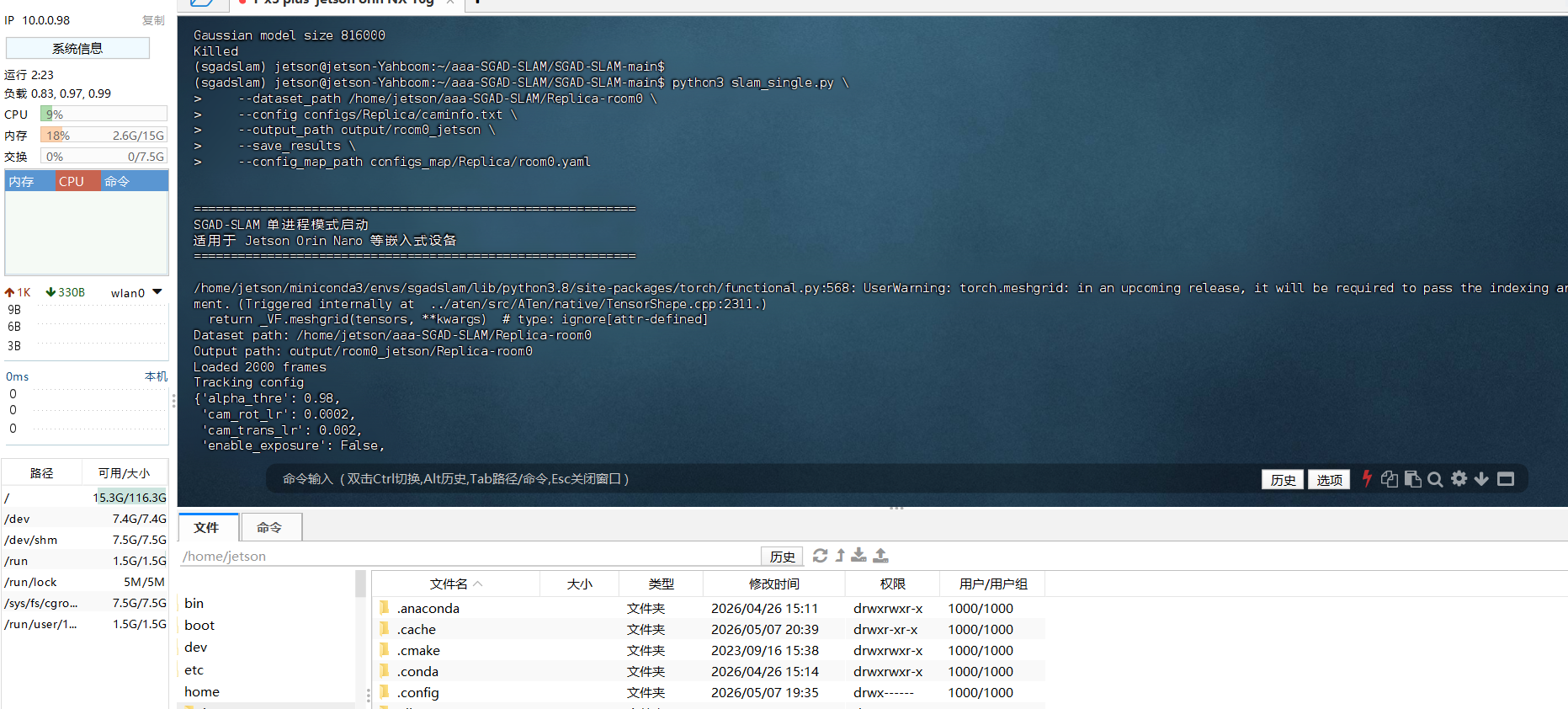
运行
python3 slam_single.py \
--dataset_path /home/jetson/aaa-SGAD-SLAM/Replica-room0 \
--config configs/Replica/caminfo.txt \
--output_path output/room0_jetson \
--save_results \
--config_map_path configs_map/Replica/room0.yaml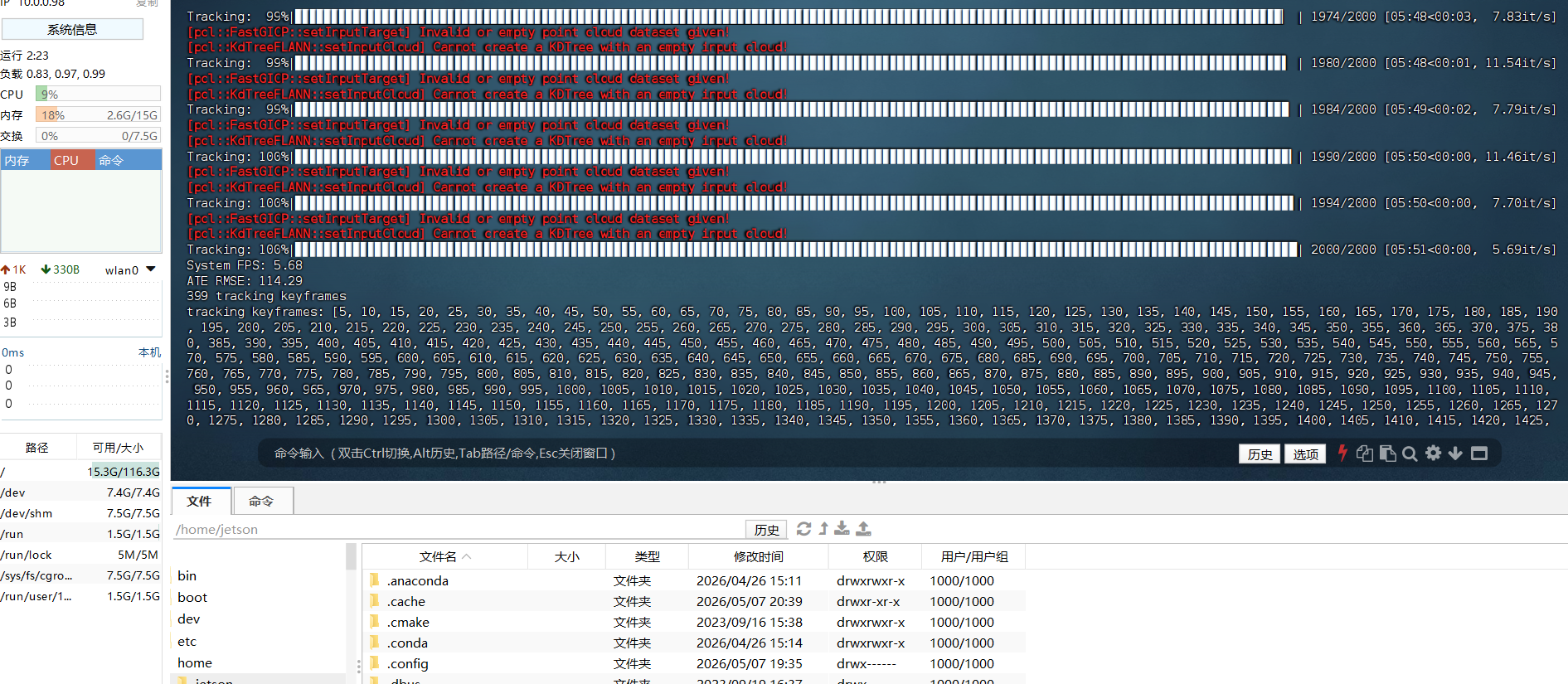
预期内存占用
-
Tracker: ~500 MB
-
Mapper: ~1-1.5 GB
-
峰值总计: < 2 GB
在 Jetson Orin Nano (15GB RAM + 7.5GB Swap) 上稳定运行。
🔍 问题排查记录
faiss-cpu libstdc++ 问题
ImportError: /lib/aarch64-linux-gnu/libstdc++.so.6: version `GLIBCXX_3.4.29' not found解决: 编译安装 faiss-gpu 1.7.2
rerun TypeError
TypeError: 'type' object is not subscriptable (Python 3.8)解决: 降级到
rerun-sdk==0.16.0Open3D 读取深度图失败
Image has unrecognized bytes_per_channel解决: 改用
imageio.imread()读取 16-bit PNGFileNotFoundError 深度图
No such file: '.../depth_0.png' (实际是 depthframe_0.png)解决: 重命名文件格式
最终配置
configs_map/Replica/replica.yaml
project_name: "SGADSLAM_replica" dataset_name: "replica" checkpoint_path: null use_wandb: False frame_limit: 200 # 限制处理帧数 seed: 1 mapping: new_submap_every: 1 map_every: 10 # 每 10 帧映射一次 iterations: 30 # 减少迭代次数 new_submap_iterations: 30 new_submap_points_num: 50000 # 关键!限制高斯点数 new_submap_gradient_points_num: 5000 new_frame_sample_size: -1 new_points_radius: 0.0000001 current_view_opt_iterations: 0.4 alpha_thre: 0.6 pruning_thre: 0.1 submap_using_motion_heuristic: False scaling_lr: 0.075 tracking: gt_camera: False gicp_camera: True w_color_loss: 0.95 iterations: 200 cam_rot_lr: 0.0002 cam_trans_lr: 0.002 odometry_type: "const_speed" help_camera_initialization: False init_err_ratio: 5 odometer_method: "point_to_plane" filter_alpha: True filter_outlier_depth: True alpha_thre: 0.98 soft_alpha: True mask_invalid_depth: False enable_exposure: False cam: H: 680 W: 1200 fx: 600.0 fy: 600.0 cx: 599.5 cy: 339.5 depth_scale: 6553.5
性能指标
Tracker 阶段
处理帧数: 2000 帧
耗时: 约 7.5 分钟 (439 秒)
FPS: ~5.68
ATE RMSE: 114.29 cm
关键帧数: 399 个
Mapper 阶段
每帧高斯点数: 5-19 万(受 new_submap_points_num 限制)
每帧处理时间: 13-15 秒
PSNR: 23-26 dB
关键修改说明
1. 单进程架构 (
slam_single.py)
移除
torch.multiprocessing,顺序执行 Tracker → Mapper避免多进程带来的内存开销(约节省 2/3 内存)
2. 减少共享内存 (
slam_single.py:103)# 原始: SharedTargetPoints(1000000000) # 40 GB # 修改: SharedTargetPoints(100000) # ~4 MB3. 限制高斯点数 (关键!)
new_submap_points_num: 50000 # 原始: -1 (无限制)4. 减少映射频率
map_every: 10 # 原始: 5 iterations: 30 # 原始: 100故障排除
问题 1: OOM - Killed
解决方案: 减少
new_submap_points_num到 50000 或更低问题 2: 配置不生效
解决方案:
确认修改的是
configs_map/Replica/replica.yaml(基础配置)而不是
configs_map/Replica/room0.yaml(继承基础配置)

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐
 8
8 0
0- 0



 已为社区贡献26条内容
已为社区贡献26条内容

所有评论(0)