论文解读:Copernicus 地球视觉基础模型
论文解读
Copernicus 地球视觉基础模型:Towards a Unified Copernicus Foundation Model for Earth Vision
论文:**Towards a Unified Copernicus Foundation Model for Earth Vision**,ICCV 2025。
关键词:遥感基础模型、地球视觉、大规模预训练、多任务迁移。
原文链接:https://openaccess.thecvf.com/content/ICCV2025/html/Wang_Towards_a_Unified_Copernicus_Foundation_Model_for_Earth_Vision_ICCV_2025_paper.html
核心观点
这篇论文讨论的是**Copernicus 地球视觉基础模型**。它的核心问题是:如何把 Copernicus 体系中的多源观测转化为统一、可复用的 Earth Vision 表征。 根据摘要表述和论文任务设置,作者并不是只追求单点指标提升,而是希望把数据来源、特征表达和任务适配放在一个更稳定的框架中处理。
摘要线索:Advances in Earth observation (EO) foundation models have unlocked the potential of big satellite data to learn generic representations from space, benefiting a wide range of downstream applications crucial to our planet.
摘要线索:However, most existing efforts remain limited to fixed spectral sensors, focus solely on the Earth’s surface, and overlook valuable metadata beyond imagery.
我的理解是,这类工作的价值主要体现在两点:一是把遥感场景中特有的传感器差异、尺度差异或地理分布差异显式纳入模型;二是让模型输出不仅能在论文实验集上有效,也能更自然地迁移到真实复杂场景。
研究背景与问题定义
遥感影像和普通自然图像最大的不同,在于它同时受到成像传感器、观测尺度、地理区域、季节变化和大气条件影响。对于 Copernicus 地球视觉基础模型,难点通常不只是“识别目标”,而是如何在分布不断变化的观测条件下保持可靠的表征和判断。
这篇论文的问题可以概括为:给定遥感观测、辅助元信息或多模态输入,学习一个函数,使其在目标任务上得到稳定输出,同时尽量减少对单一数据集、单一区域或单一传感器的依赖。
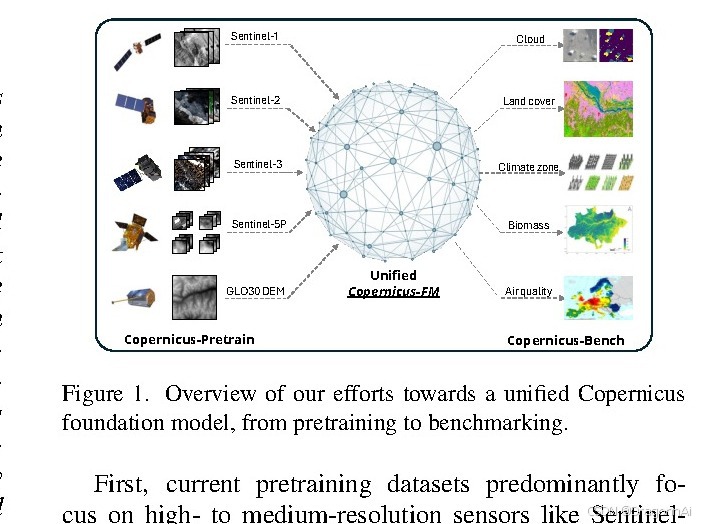
图注:Figure 1. Overview of our efforts towards a unified Copernicus
这张图是理解方法结构的入口。可以重点看输入如何进入模型、核心模块如何串联,以及输出端如何服务 Copernicus 地球视觉基础模型;它对应的不是单个 trick,而是论文整体建模路线。
方法框架概览
方法重点通常在大规模预训练、元信息注入和轻量任务适配之间取得平衡,让一个主干服务分类、分割、检测、变化检测等多类任务。 方法设计背后的共同逻辑是:先获得对遥感数据更友好的中间表征,再围绕任务目标进行适配或约束。
从实现路径上看,可以按三层来理解这篇论文的技术结构:
- **数据/输入组织**:处理多源影像、时相、光谱、空间分辨率或文本/元信息等输入差异。
- **表征学习主干**:通过 Transformer、Mamba、CNN、MoE、Adapter、扩散模型或对比学习等机制构造可迁移特征。
- **任务约束与优化**:用重建、分类、对齐、检测、变化掩码或生成损失把表征拉回具体任务。
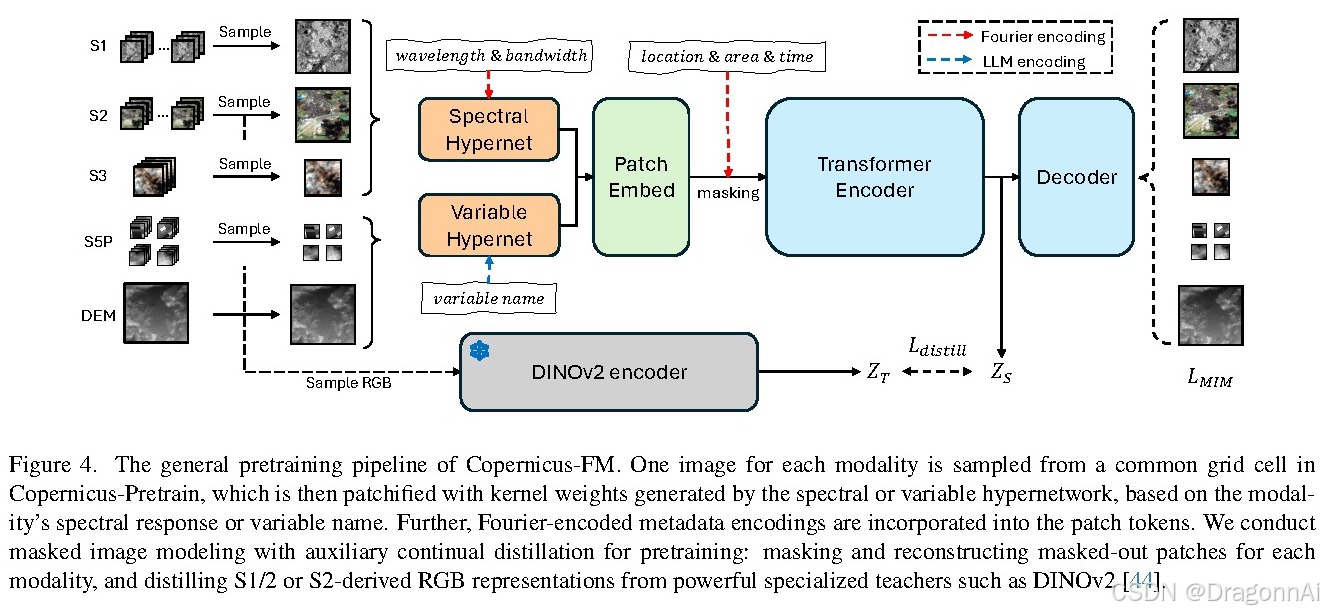
图注:Figure 4. The general pretraining pipeline of Copernicus-FM. One image for each modality is sampled from a common grid cell in Copernicus-Pretrain, which is then patchified with kernel weights generated by the spectral or variable hypernetwork, based on the modal- ity’s spectral response or variable name. Further, Fourier-encoded metadata encodings are incorporated into the patch tokens. We conduct masked image modeling with auxiliary continual distillation for pretraining: masking and reconstructing masked-out patches for each
这张图是理解方法结构的入口。可以重点看输入如何进入模型、核心模块如何串联,以及输出端如何服务 Copernicus 地球视觉基础模型;它对应的不是单个 trick,而是论文整体建模路线。
关键公式与技术表达
为避免公众号排版里出现零散公式占整行的问题,这里把关键公式写成紧凑技术表达:
预训练:z = f_theta(x, m)
任务适配:y_hat = g_phi(z, task)
联合目标:L = L_pretrain + lambda * L_downstream这组表达对应论文中的核心建模思想:输入端要刻画遥感数据的多样性,中间层要学习可迁移表征,输出端再通过任务损失或一致性约束完成优化。
实验设置与结果解读
实验部分通常会回答三个问题:
- 该方法是否优于已有遥感视觉方法或通用视觉主干。
- 在跨区域、跨数据集、跨传感器或不同退化条件下是否仍然稳定。
- 消融实验能否证明核心模块确实带来收益,而不是只依赖更大的模型或更多数据。
结合摘要和任务设置,这篇论文的实验重点应围绕**Copernicus 地球视觉基础模型**展开。阅读时建议重点看主表格中的最佳/次优指标、跨域实验设置,以及作者是否给出模块级消融。对于遥感论文,视觉对比图也很重要,因为空间边界、纹理结构和光谱一致性往往无法被单个指标完全解释。
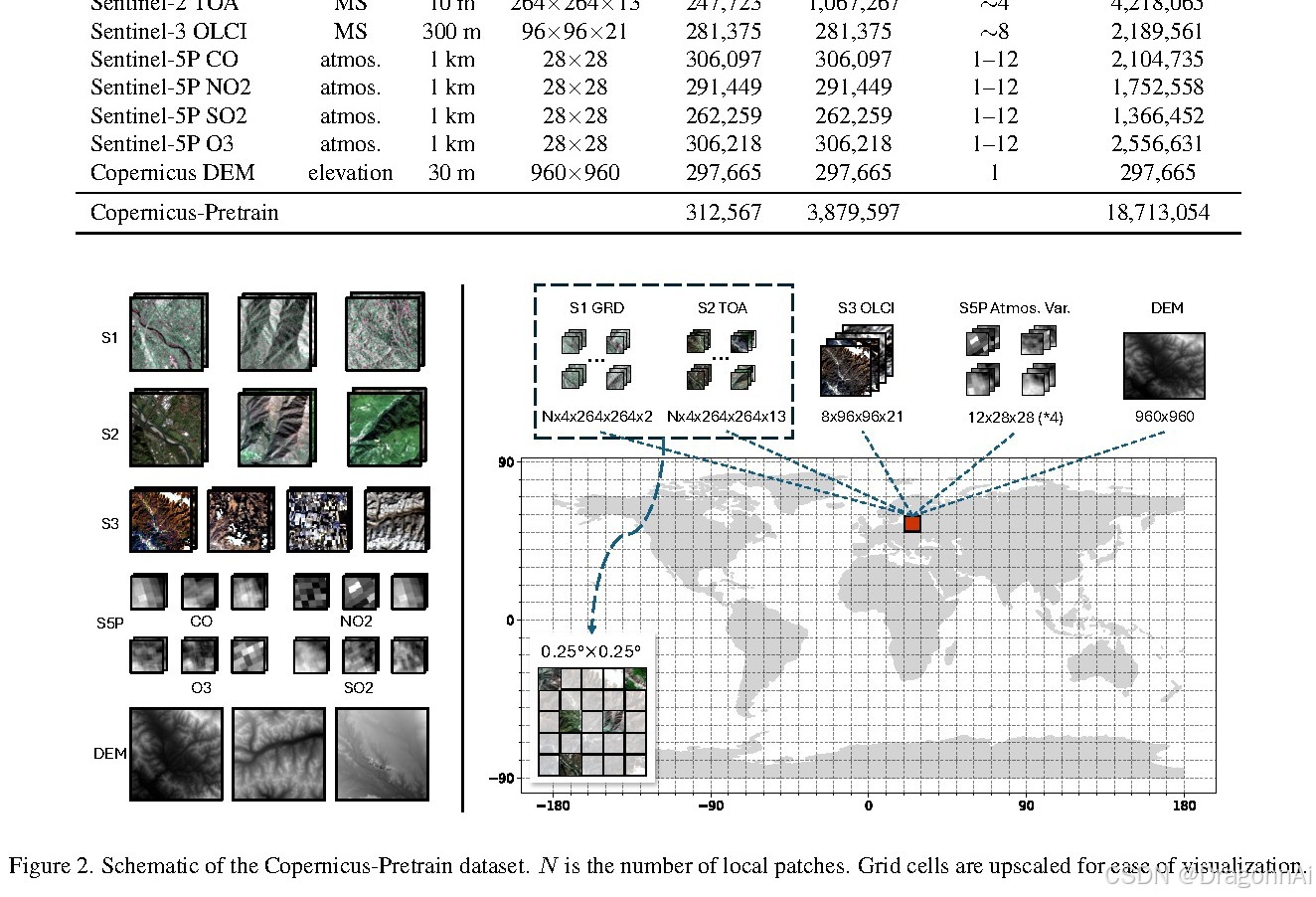
图注:Figure 2. Schematic of the Copernicus-Pretrain dataset. N is the number of local patches. Grid cells are upscaled for ease of visualization.
这张图主要说明数据来源与样本形态。遥感论文的泛化能力很大程度取决于数据覆盖范围、传感器差异和场景多样性,因此这类图比普通示例图更重要。
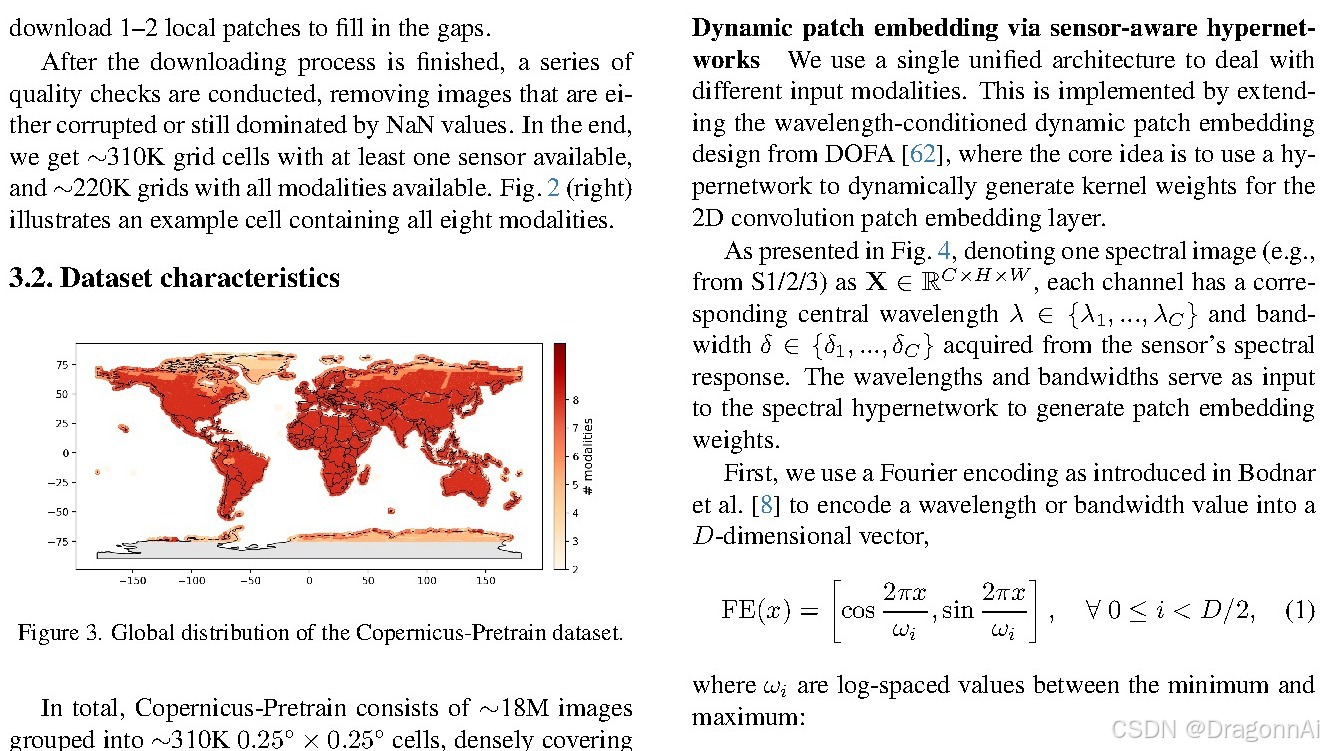
图注:Figure 3. Global distribution of the Copernicus-Pretrain dataset. ω i ω i where ω i are log-spaced values between the minimum and
这张图主要说明数据来源与样本形态。遥感论文的泛化能力很大程度取决于数据覆盖范围、传感器差异和场景多样性,因此这类图比普通示例图更重要。
方法价值与局限
这篇论文的直接价值在于,它把 Copernicus 地球视觉基础模型 中的关键矛盾显式化:模型既要利用遥感数据的大规模、多模态或物理属性,又要避免对某个训练域过拟合。对后续研究来说,可借鉴的地方主要是问题抽象方式、输入组织策略和损失设计。
可能的局限也值得关注:如果方法依赖大规模预训练或复杂模块,部署成本会变高;如果只在少数区域或传感器上验证,泛化结论仍需要更多真实场景支撑;如果公式和结构较复杂,还需要看消融是否足够清楚地证明每个模块的必要性。
总结
总的来说,**Towards a Unified Copernicus Foundation Model for Earth Vision** 是一篇围绕 Copernicus 地球视觉基础模型 展开的工作。它的核心不是简单堆叠模型,而是试图让遥感数据的空间、光谱、时间、传感器或语义特性进入学习过程。对于关注遥感基础模型、多模态融合、变化检测、光谱分析和地理空间智能的读者,这篇论文值得作为一个单独案例细读。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐

 10
10 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)