数字孪生驱动智能制造:工厂产线的全周期协同与优化实践
引言
工业4.0浪潮下,制造企业面临柔性生产、快速交付与成本控制的多重压力。传统产线依赖静态设计图纸和事后纠偏的管理模式,已难以应对动态订单扰动、设备衰退与工艺波动。数字孪生(Digital Twin)作为一种融合物理实体、虚拟模型与实时数据的闭环技术体系,正在成为工厂产线从“自动化”迈向“自优化”的关键使能手段。本文将聚焦产线级应用,从数据底座、模型构建、虚实联动到闭环优化,系统阐述数字孪生的落地逻辑与实践价值。

1. 数字孪生的三层架构:打通产线的“物理-数字-决策”链路
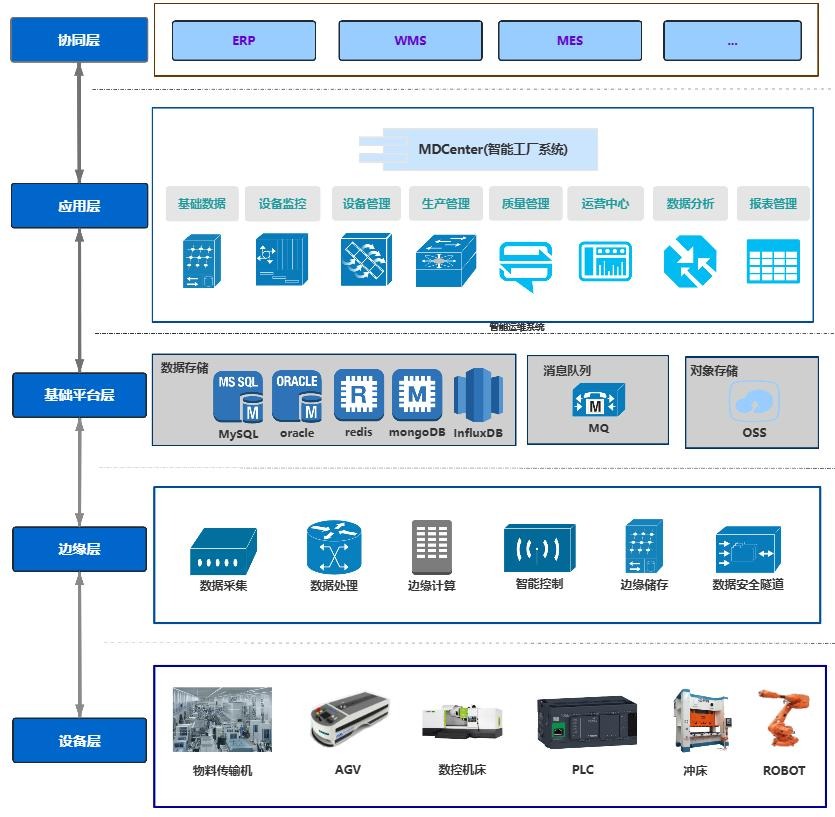
工厂产线的数字孪生并非简单的三维可视化,而是一个具备感知-建模-决策-执行闭环能力的有机系统。其典型架构可分解为三层:
-
物理层:涵盖产线中所有设备(PLC、机器人、AGV、传送带)、传感器(振动、温度、电流)、在制品及操作人员。该层通过工业总线(Profinet、EtherCAT)或5G/TSN网络实时上传状态数据,并接收来自孪生系统的反向控制指令。
-
虚拟层:基于CAD、MBD(基于模型的定义)构建高保真几何模型,同时嵌入多物理场(动力学、热力学)与工艺行为模型。更进一步,需建立数据驱动的代理模型(如神经网络降阶模型)以实现实时仿真。典型工具包括Unity+PiXYZ、西门子NX MCD、达索3DEXPERIENCE。
-
数据与决策层:通过时序数据库(InfluxDB)与资产谱系管理存储历史数据,结合规则引擎、优化算法或强化学习模型,生成产线调度、工艺参数或维护策略的增量决策,并经由OPC UA或MQTT回写至PLC/SCADA。
三层之间通过实时数据管道(如Kafka、MQTT + Spark Streaming)形成双向映射——物理层的每一个动作都会触发虚拟模型的同步更新,而虚拟层仿真推演出的“最优解”也将直接干预物理设备的运行姿态。

2. 产线设计阶段的“镜像验证”:从串行调试到并行协同
传统产线设计往往遵循“工艺规划→布局仿真→设备采购→现场调试”的瀑布流程。当实际安装时发现干涉、节拍不匹配或物流死锁,修改成本可达初始阶段的10~20倍。数字孪生在设计阶段的价值体现为虚拟调试:
-
几何干涉与可达性检查:在虚拟环境中导入机器人、工装夹具与工件模型,模拟完整运动路径,自动输出碰撞报告。例如某汽车焊装线利用NX MCD提前发现6处机器人可达性不足,避免现场切割重焊。
-
工艺节拍仿真:基于离散事件仿真(DES)引擎,输入各工位加工时间、AGV运输速度、缓冲区容量,运行5000次蒙特卡洛仿真,识别瓶颈工位并优化缓存分配。典型输出包括OEE预测、在制品堆积热力图。
-
电气与逻辑验证:将PLC程序加载至虚拟控制器(如Siemens PLCSIM Advanced),与虚拟模型中的传感器、电机模型进行信号级联调。可提前暴露程序死循环、互锁冲突等逻辑错误,减少现场调试时间30%以上。
虚拟调试的结果(优化后的布局、PLC代码、机器人轨迹点)直接导出至现场设备,实现“一次建模、全局复用”。

3. 实时运行层:同步映射、异常预警与自愈控制
产线投产后的核心目标是维持高可用、高质量运行。数字孪生在此阶段扮演“镜像观察员+紧急调控员”的双重角色。
3.1 高保真同步映射
-
位姿同步:对于龙门架、转台等运动部件,通过编码器值和运动学正解算法,实时刷新虚拟模型的空间坐标,要求端到端延迟低于50ms(人眼可接受阈值)。典型方案采用RTDE(实时数据交换)协议采集机器人状态。
-
状态一致性:设备的工作模式(自动/手动/待机)、报警代码、当前加工程序号等离散状态需与虚拟模型完全对应。通过OPC UA节点映射实现双向绑定。
-
异常趋势复现:当产线出现非预期停顿时,可回放历史数据驱动虚拟模型“回放”故障前30秒的物理过程,辅助工程师定位是传感器失灵、控制器输出丢失还是机械卡滞。
3.2 基于模型和数据的异常预警
传统SCADA依赖固定阈值报警,往往发现时已产生次品或发生停线。数字孪生在预警方面引入残差分析与预测模型:
-
残差分析:以虚拟模型的理想输出(如伺服电机的理论电流、理论振动频谱)与物理传感器的实测值作差。当残差持续偏离正态分布(例如超过3σ),系统判定存在隐性衰退,例如刀具钝化导致主轴负载异常升高。
-
预测性维护:采集关键部件的历史故障数据与实时振动/温度信号,训练LSTM或时序Transformer模型,预测剩余寿命(RUL)。当预测置信区间低于定检周期时,自动推送建议更换时间窗口,避免突发失效。
3.3 动态重调度与自愈控制
当产线出现扰动(紧急插单、设备部分降级、物料延迟)时,孪生系统可在虚拟环境中快速推演多种调度策略的效果:
-
场景假设:若机器人R2因减速机过热需限速运行,是否可以通过调整上游传送带节拍、分流部分工件到旁路工位来维持整线产出?
-
优化求解:基于强化学习(DQN或PPO)训练的调度策略网络,在0.5秒内输出最优动作(如AGV路径重规划、缓存区优先级调整)。
-
控制执行:将动作参数封装为指令,经MES或直接写入PLC。整个过程从扰动发生到策略生效可控制在秒级,显著优于人工介入的分钟级响应。

4. 工艺参数智能优化:从离线实验到在线演化
产线中典型工艺参数(焊接电流、注塑保压压力、CNC进给率)通常依靠工艺工程师的经验设定,或者通过田口实验离线优化,一旦工况偏移(环境温度变化、批次材料差异)则效率下降。数字孪生支持在线贝叶斯优化或深度强化学习来持续寻优:
-
定义优化目标(例如:油耗/加工时间+质量损失的综合成本最小化)。
-
孪生模型作为环境的低成本代理:真实产线每次试错成本高昂,而高精度的孪生模型可以在虚拟空间中以加速(例如10倍实时)方式执行参数组合,预估其效果。
-
利用高斯过程回归或贝叶斯神经网络拟合参数→性能的响应面,通过采集函数(如EI)推荐下一组候选参数。
-
将推荐参数下发至产线执行一小批次生产,将实测结果反馈回模型进行贝叶斯更新。
-
逐步收敛至全局最优或适应动态漂移。
某精密加工案例显示,采用上述方法,数控机床的进给率参数经过30次迭代(耗时不到2小时,其中仅5次真实试验),实现了刀具寿命提升18%、表面粗糙度降低22%的改进。
5. 典型技术栈与落地挑战
5.1 关键技术选型建议
| 层级 | 常用方案 |
|---|---|
| 建模与渲染 | Unity + URP(轻量级产线)/ Unreal Engine + PiXYZ(高保真) |
| 实时数据采集 | Kepware OPC UA、Mongoose Push(MQTT桥接) |
| 数字孪生平台 | Microsoft Azure Digital Twins (ADT)、AWS IoT TwinMaker、开源Eclipse Ditto |
| 仿真引擎 | 离散事件:AnyLogic / Simio;多体动力学:Modelica / Simscape |
| 数据与服务层 | InfluxDB + Grafana(可视化);Airflow(工作流编排);PyTorch(AI模型) |
5.2 常见阻碍与应对策略
-
数据孤岛:不同厂商设备提供私有协议。解决方法是部署边缘网关(如Node-RED),将Modbus/Profibus统一转换为MQTT/OPC UA。
-
模型保真度与实时性矛盾:过于精细的有限元模型无法实时运行。可通过降阶ROM、多分辨率网格(远距离粗模型,近距细模型)或仅对关键部件建立高保真子模型。
-
同步延迟累积:超过100ms的延迟会严重降低操作员信任。需采用时间戳补偿机制、预测性插值算法,并优先保证控制信号的确定性传输(例如TSN)。
-
投入产出比:并非所有产线都需要全要素孪生。建议按价值优先级分步实施:首先对瓶颈工位、昂贵设备(如五轴机床)或高危场景(如压铸)建立孪生,再逐步扩展。
6. 案例分享:电子组件SMT产线的数字孪生实践
以某EMS工厂的一条高速贴片线为例,包含自动上板机、印刷机、SPI(焊膏检测)、贴片机、回流焊和AOI。原有痛点:
-
换线时手工调整轨道宽度、吸嘴配置,平均耗时35分钟;
-
SPI误报率高达12%,导致大量不必要的停顿复测;
-
贴片机吸嘴磨损无法感知,偶尔漏贴造成批量返修。
实施数字孪生方案后的关键改进:
-
虚拟换线:操作员在孪生界面输入新产品PCB尺寸与元件清单,系统自动推导轨道参数、吸嘴排布、送料器位置,并生成校验动画。确认后一键下发至设备,换线时间压缩至9分钟。
-
SPI误报抑制:将锡膏体积、高度、面积数据的实时流送入孪生模型的分类器(隔离森林),结合历史AOI数据训练。模型动态调整判定阈值,误报率降至3.5%。
-
吸嘴剩余寿命预测:基于贴片机真空度、拾取成功率时序数据,训练LSTM模型预测吸嘴堵塞风险。提前15分钟预警更换,漏贴缺陷降低76%。
结语
数字孪生在工厂产线的价值递进路径清晰:先“看得见”(同步可视化),再“说得清”(异常诊断与溯源),最终实现“控得准”(自主优化与决策)。它不是一套标准软件,而是一种整合传感、建模、仿真、数据与AI的系统工程方法。企业在推进时,应立足一条典型产线、选择一个明确痛点(如换型效率或设备综合效率),小步迭代,积累模型资产与数据认知。当孪生系统从“被动映射”进化为“主动推演”之时,产线便真正拥有了自优化的“数字大脑”。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐



 10
10 0
0- 0



 已为社区贡献10条内容
已为社区贡献10条内容

所有评论(0)