yolov26改进 | Conv/卷积篇 | 轻量化SAConv可切换空洞卷积二次创新C3k2(含手绘网络结构图,全网独家整理)
开始讲解之前推荐一下我的专栏,本专栏的内容支持(分类、检测、分割、追踪、关键点检测),专栏目前为限时折扣,欢迎大家订阅本专栏,本专栏每周更新5-7篇最新机制,更有包含我所有改进的文件和交流群提供给大家,本人定期在群内分享发表论文方法和经验。
一、本文介绍
本文给大家带来的改进机制是可切换的空洞卷积(Switchable Atrous Convolution, SAC)是一种创新的卷积网络机制,专为增强物体检测和分割任务中的特征提取而设计。SAC的核心思想是在相同的输入特征上应用不同的空洞率进行卷积,并通过特别设计的开关函数来融合这些不同卷积的结果。这种方法使得网络能够更灵活地适应不同尺度的特征,从而更准确地识别和分割图像中的物体。 通过本文你能够了解到:可切换的空洞卷积的基本原理和框架,能够在你自己的网络结构中进行添加(含二次创新C3k2机制)。
专栏链接:YOLOv26有效涨点专栏包含:Conv、注意力机制、主干/Backbone、损失函数、优化器、后处理等改进机制
目录
二、SAConv的机制原理介绍
论文地址:官方论文地址
代码地址:官方代码地址
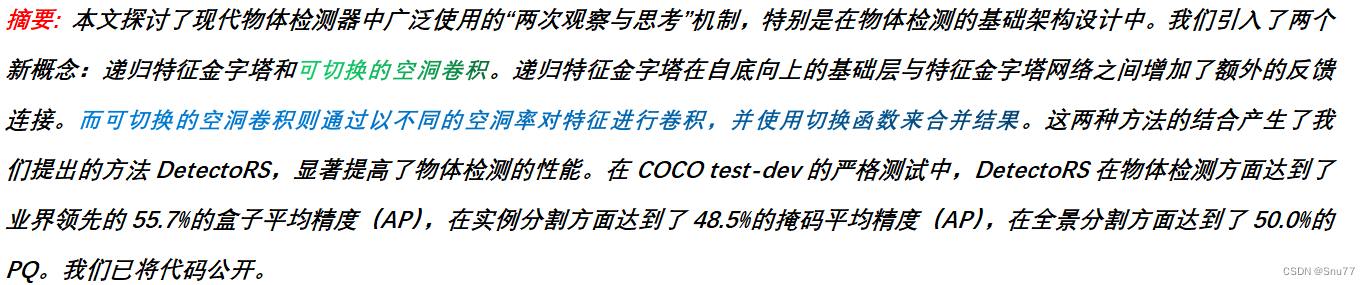
可切换的空洞卷积(Switchable Atrous Convolution,简称SAC)是一种高级的卷积机制,用于在物体检测和分割任务中增强特征提取。以下是SAC的主要原理和机制:
1. 不同空洞率的应用: SAC的核心思想是对相同的输入特征应用不同的空洞率进行卷积。空洞卷积通过在卷积核中引入额外的空间(即空洞),扩大了感受野,而不增加参数数量或计算量。SAC利用这一点来捕获不同尺度的特征。
2. 开关函数的使用: SAC的另一个关键特点是使用开关函数来组合不同空洞率卷积的结果。这些开关函数是空间依赖的,意味着特征图的每个位置可能有不同的开关来控制SAC的输出,从而使网络对于特征的大小和尺度更加灵活。
3. 转换机制: SAC能够将传统的卷积层转换为SAC层。这是通过在不同空洞率的卷积操作中使用相同的权重(除了一个可训练的差异)来实现的。这种转换机制包括一个平均池化层和一个1x1卷积层,以实现开关功能。
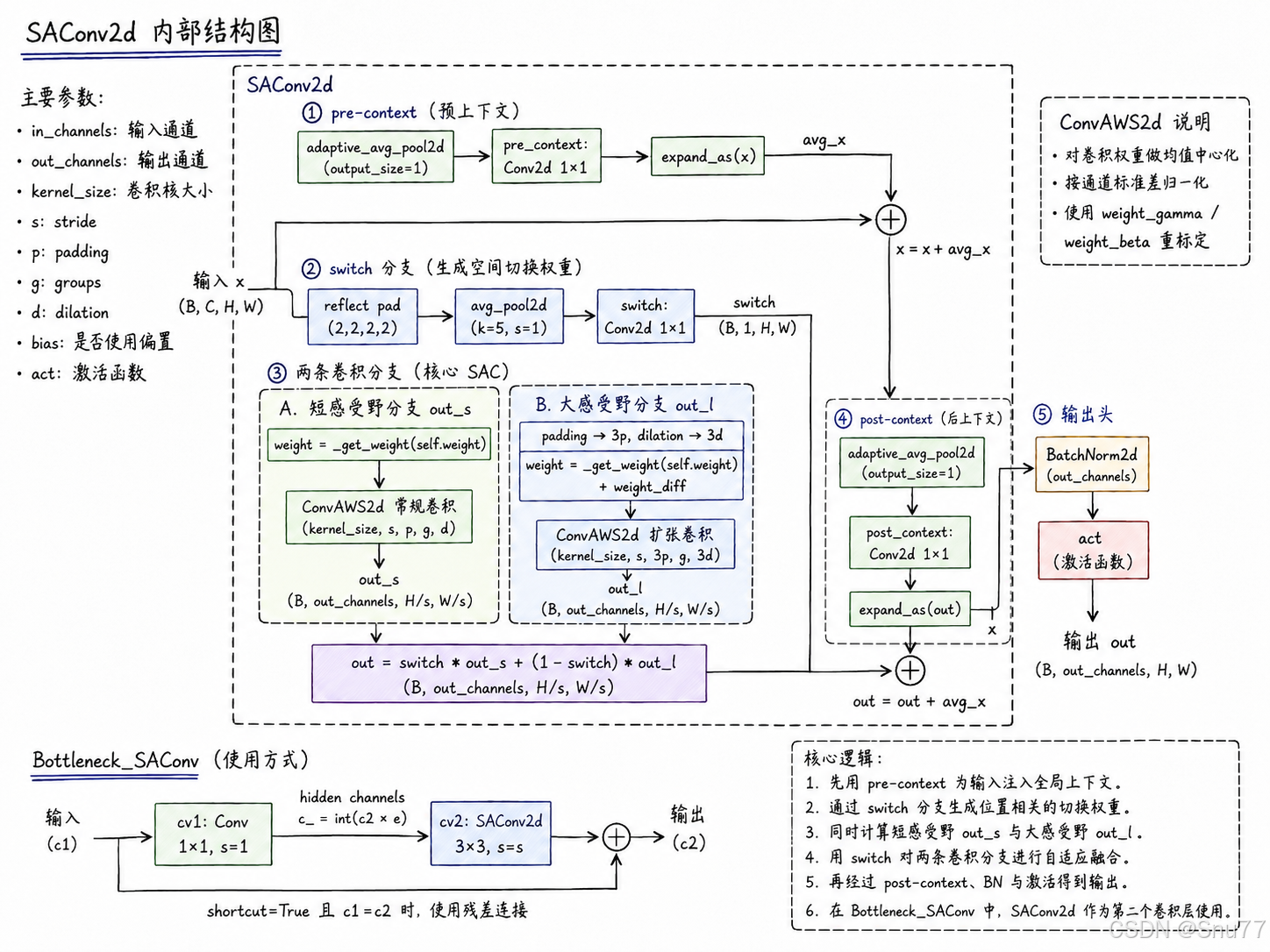
4. 结构设计: SAC的架构包括三个主要部分:两个全局上下文模块分别位于SAC组件的前后。这些模块有助于更全面地理解图像内容,使SAC组件能够在更宽泛的上下文中有效地工作。
总结:SAC通过这些创新的设计和机制,提高了网络在处理不同尺度和复杂度的特征时的适应性和准确性,从而在物体检测和分割领域显示出显著的性能提升。
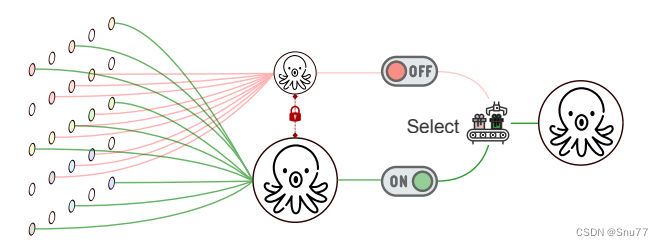
上图我们能看到其中的关键点如下->
-
双重观察机制: SAC特别设计了一种机制,它能够对输入特征进行两次观察,但每次使用不同的空洞率。这意味着,同一组输入特征会被两种不同配置的卷积核处理,其中每种配置对应一种特定的空洞率。这样做可以捕获不同尺度的特征信息,从而更全面地理解和分析输入数据。
-
开关函数的应用: 不同空洞率得到的输出结果随后通过开关函数结合在一起。这些开关决定了如何从两次卷积中选择或融合信息,从而生成最终的输出特征。开关的运作方式可能依赖于特征本身的特性,如其空间位置等。
总结:SAC通过这种“双重观察并结合”的策略,能够有效地处理复杂的特征模式,特别是在尺度变化较大的情况下。这种方法不仅提高了特征提取的灵活性和适应性,而且还提升了物体检测和分割任务中的准确性和效率。
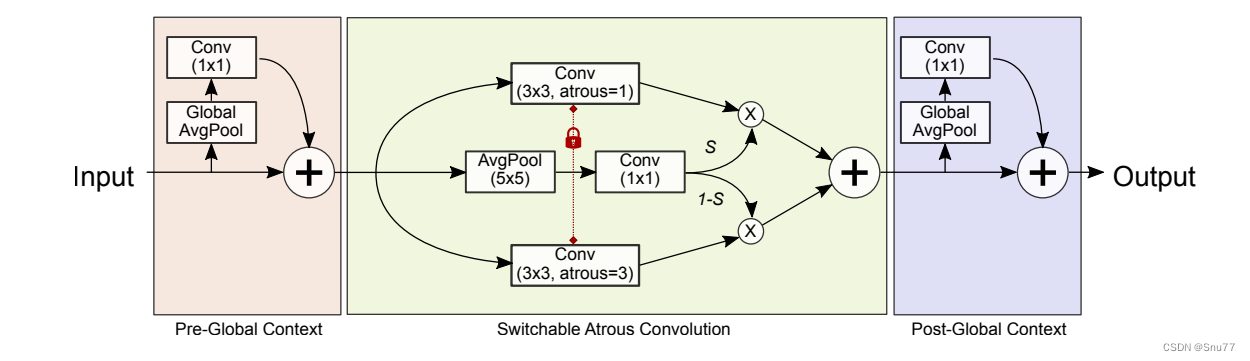
在上图中展示了可切换的空洞卷积(Switchable Atrous Convolution, SAC)的具体实现方式。这里的关键点包括:
-
转换传统卷积层为SAC: 他们将骨干网络ResNet中的每一个3x3卷积层都转换为SAC。这种转换使得卷积计算可以在不同的空洞率之间软切换。
-
权重共享与训练差异: 重要的一点是,尽管SAC在不同的空洞率间进行切换,但所有这些操作共享相同的权重,只有一个可训练的差异。这种设计减少了模型复杂性,同时保持了灵活性。
-
全局上下文模块: SAC结构还包括两个全局上下文模块,这些模块为特征添加了图像级的信息。全局上下文模块有助于网络更好地理解和处理图像的整体内容,从而提高特征提取的质量和准确性。
总结:SAC通过这些机制,允许网络在不同的空洞率之间灵活切换,同时通过全局上下文模块和共享权重的策略,有效地提升了特征的提取和处理能力。这些特性使得SAC在物体检测和分割任务中表现出色。
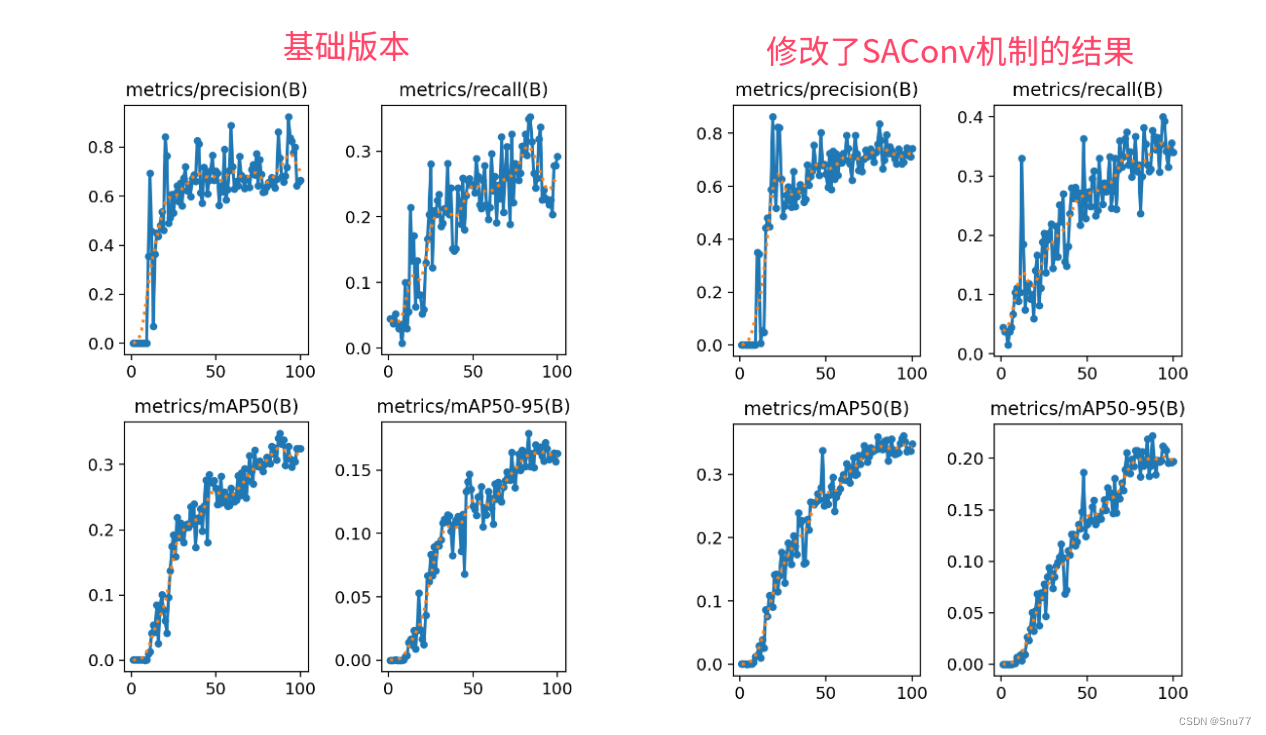
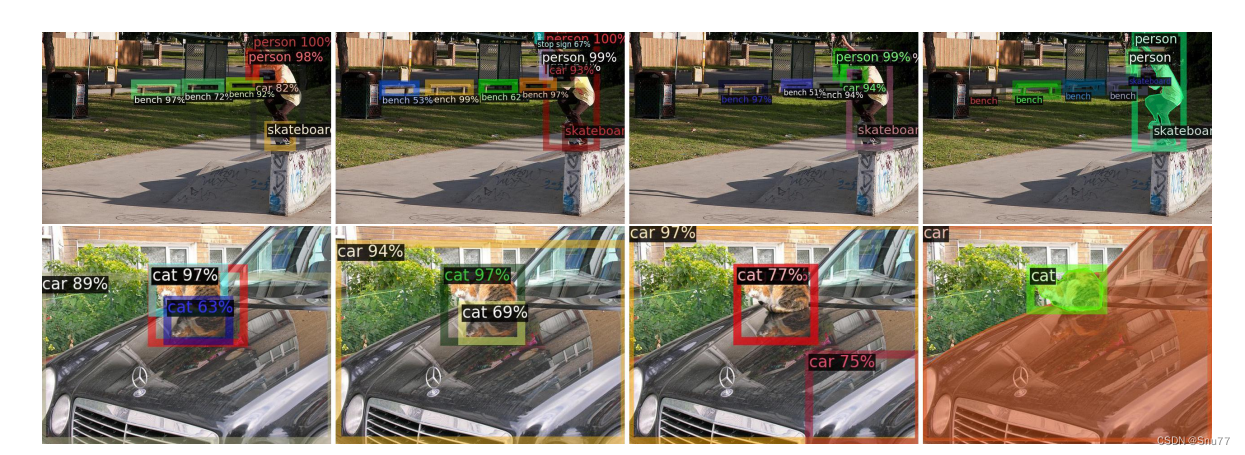
下面是部分的检测效果图->
三、核心代码
import torch
import torch.nn as nn
from ultralytics.nn.modules.conv import autopad, Conv
__all__ = ['SAConv2d', 'C3k2_SAConv']
class ConvAWS2d(nn.Conv2d):
def __init__(self,
in_channels,
out_channels,
kernel_size,
stride=1,
padding=0,
dilation=1,
groups=1,
bias=True):
super().__init__(
in_channels,
out_channels,
kernel_size,
stride=stride,
padding=padding,
dilation=dilation,
groups=groups,
bias=bias)
self.register_buffer('weight_gamma', torch.ones(self.out_channels, 1, 1, 1))
self.register_buffer('weight_beta', torch.zeros(self.out_channels, 1, 1, 1))
def _get_weight(self, weight):
weight_mean = weight.mean(dim=1, keepdim=True).mean(dim=2,
keepdim=True).mean(dim=3, keepdim=True)
weight = weight - weight_mean
std = torch.sqrt(weight.view(weight.size(0), -1).var(dim=1) + 1e-5).view(-1, 1, 1, 1)
weight = weight / std
weight = self.weight_gamma * weight + self.weight_beta
return weight
def forward(self, x):
weight = self._get_weight(self.weight)
return super()._conv_forward(x, weight, None)
def _load_from_state_dict(self, state_dict, prefix, local_metadata, strict,
missing_keys, unexpected_keys, error_msgs):
self.weight_gamma.data.fill_(-1)
super()._load_from_state_dict(state_dict, prefix, local_metadata, strict,
missing_keys, unexpected_keys, error_msgs)
if self.weight_gamma.data.mean() > 0:
return
weight = self.weight.data
weight_mean = weight.data.mean(dim=1, keepdim=True).mean(dim=2,
keepdim=True).mean(dim=3, keepdim=True)
self.weight_beta.data.copy_(weight_mean)
std = torch.sqrt(weight.view(weight.size(0), -1).var(dim=1) + 1e-5).view(-1, 1, 1, 1)
self.weight_gamma.data.copy_(std)
class SAConv2d(ConvAWS2d):
def __init__(self,
in_channels,
out_channels,
kernel_size,
s=1,
p=None,
g=1,
d=1,
act=True,
bias=True):
super().__init__(
in_channels,
out_channels,
kernel_size,
stride=s,
padding=autopad(kernel_size, p, d),
dilation=d,
groups=g,
bias=bias)
self.switch = torch.nn.Conv2d(
self.in_channels,
1,
kernel_size=1,
stride=s,
bias=True)
self.switch.weight.data.fill_(0)
self.switch.bias.data.fill_(1)
self.weight_diff = torch.nn.Parameter(torch.Tensor(self.weight.size()))
self.weight_diff.data.zero_()
self.pre_context = torch.nn.Conv2d(
self.in_channels,
self.in_channels,
kernel_size=1,
bias=True)
self.pre_context.weight.data.fill_(0)
self.pre_context.bias.data.fill_(0)
self.post_context = torch.nn.Conv2d(
self.out_channels,
self.out_channels,
kernel_size=1,
bias=True)
self.post_context.weight.data.fill_(0)
self.post_context.bias.data.fill_(0)
self.bn = nn.BatchNorm2d(out_channels)
self.act = Conv.default_act if act is True else act if isinstance(act, nn.Module) else nn.Identity()
def forward(self, x):
# pre-context
avg_x = torch.nn.functional.adaptive_avg_pool2d(x, output_size=1)
avg_x = self.pre_context(avg_x)
avg_x = avg_x.expand_as(x)
x = x + avg_x
# switch
avg_x = torch.nn.functional.pad(x, pad=(2, 2, 2, 2), mode="reflect")
avg_x = torch.nn.functional.avg_pool2d(avg_x, kernel_size=5, stride=1, padding=0)
switch = self.switch(avg_x)
# sac
weight = self._get_weight(self.weight)
out_s = super()._conv_forward(x, weight, None)
ori_p = self.padding
ori_d = self.dilation
self.padding = tuple(3 * p for p in self.padding)
self.dilation = tuple(3 * d for d in self.dilation)
weight = weight + self.weight_diff
out_l = super()._conv_forward(x, weight, None)
out = switch * out_s + (1 - switch) * out_l
self.padding = ori_p
self.dilation = ori_d
# post-context
avg_x = torch.nn.functional.adaptive_avg_pool2d(out, output_size=1)
avg_x = self.post_context(avg_x)
avg_x = avg_x.expand_as(out)
out = out + avg_x
return self.act(self.bn(out))
class Bottleneck_SAConv(nn.Module):
# Standard bottleneck with DCN
def __init__(self, c1, c2, shortcut=True, g=1, k=(3, 3), e=0.5): # ch_in, ch_out, shortcut, groups, kernels, expand
super().__init__()
c_ = int(c2 * e) # hidden channels
self.cv1 = Conv(c1, c_, k[0], 1)
self.cv2 = SAConv2d(c_, c2, 3, s=1, g=g)
self.add = shortcut and c1 == c2
def forward(self, x):
return x + self.cv2(self.cv1(x)) if self.add else self.cv2(self.cv1(x))
class Bottleneck(nn.Module):
"""Standard bottleneck."""
def __init__(
self, c1: int, c2: int, shortcut: bool = True, g: int = 1, k: tuple[int, int] = (3, 3), e: float = 0.5
):
"""Initialize a standard bottleneck module.
Args:
c1 (int): Input channels.
c2 (int): Output channels.
shortcut (bool): Whether to use shortcut connection.
g (int): Groups for convolutions.
k (tuple): Kernel sizes for convolutions.
e (float): Expansion ratio.
"""
super().__init__()
c_ = int(c2 * e) # hidden channels
self.cv1 = Conv(c1, c_, k[0], 1)
self.cv2 = Conv(c_, c2, k[1], 1, g=g)
self.add = shortcut and c1 == c2
def forward(self, x: torch.Tensor) -> torch.Tensor:
"""Apply bottleneck with optional shortcut connection."""
return x + self.cv2(self.cv1(x)) if self.add else self.cv2(self.cv1(x))
class C2f(nn.Module):
"""Faster Implementation of CSP Bottleneck with 2 convolutions."""
def __init__(self, c1, c2, n=1, shortcut=False, g=1, e=0.5):
"""Initializes a CSP bottleneck with 2 convolutions and n Bottleneck blocks for faster processing."""
super().__init__()
self.c = int(c2 * e) # hidden channels
self.cv1 = Conv(c1, 2 * self.c, 1, 1)
self.cv2 = Conv((2 + n) * self.c, c2, 1) # optional act=FReLU(c2)
self.m = nn.ModuleList(Bottleneck(self.c, self.c, shortcut, g, k=((3, 3), (3, 3)), e=1.0) for _ in range(n))
def forward(self, x):
"""Forward pass through C2f layer."""
y = list(self.cv1(x).chunk(2, 1))
y.extend(m(y[-1]) for m in self.m)
return self.cv2(torch.cat(y, 1))
def forward_split(self, x):
"""Forward pass using split() instead of chunk()."""
y = list(self.cv1(x).split((self.c, self.c), 1))
y.extend(m(y[-1]) for m in self.m)
return self.cv2(torch.cat(y, 1))
class C3(nn.Module):
"""CSP Bottleneck with 3 convolutions."""
def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5):
"""Initialize the CSP Bottleneck with given channels, number, shortcut, groups, and expansion values."""
super().__init__()
c_ = int(c2 * e) # hidden channels
self.cv1 = Conv(c1, c_, 1, 1)
self.cv2 = Conv(c1, c_, 1, 1)
self.cv3 = Conv(2 * c_, c2, 1) # optional act=FReLU(c2)
self.m = nn.Sequential(*(Bottleneck(c_, c_, shortcut, g, k=((1, 1), (3, 3)), e=1.0) for _ in range(n)))
def forward(self, x):
"""Forward pass through the CSP bottleneck with 2 convolutions."""
return self.cv3(torch.cat((self.m(self.cv1(x)), self.cv2(x)), 1))
class C3k(C3):
"""C3k is a CSP bottleneck module with customizable kernel sizes for feature extraction in neural networks."""
def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5, k=3):
"""Initializes the C3k module with specified channels, number of layers, and configurations."""
super().__init__(c1, c2, n, shortcut, g, e)
c_ = int(c2 * e) # hidden channels
# self.m = nn.Sequential(*(RepBottleneck(c_, c_, shortcut, g, k=(k, k), e=1.0) for _ in range(n)))
self.m = nn.Sequential(*(Bottleneck(c_, c_, shortcut, g, k=(k, k), e=1.0) for _ in range(n)))
class Attention_YOLOv26(nn.Module):
"""Attention module that performs self-attention on the input tensor.
Args:
dim (int): The input tensor dimension.
num_heads (int): The number of attention heads.
attn_ratio (float): The ratio of the attention key dimension to the head dimension.
Attributes:
num_heads (int): The number of attention heads.
head_dim (int): The dimension of each attention head.
key_dim (int): The dimension of the attention key.
scale (float): The scaling factor for the attention scores.
qkv (Conv): Convolutional layer for computing the query, key, and value.
proj (Conv): Convolutional layer for projecting the attended values.
pe (Conv): Convolutional layer for positional encoding.
"""
def __init__(self, dim: int, num_heads: int = 8, attn_ratio: float = 0.5):
"""Initialize multi-head attention module.
Args:
dim (int): Input dimension.
num_heads (int): Number of attention heads.
attn_ratio (float): Attention ratio for key dimension.
"""
super().__init__()
self.num_heads = num_heads
self.head_dim = dim // num_heads
self.key_dim = int(self.head_dim * attn_ratio)
self.scale = self.key_dim**-0.5
nh_kd = self.key_dim * num_heads
h = dim + nh_kd * 2
self.qkv = Conv(dim, h, 1, act=False)
self.proj = Conv(dim, dim, 1, act=False)
self.pe = Conv(dim, dim, 3, 1, g=dim, act=False)
def forward(self, x: torch.Tensor) -> torch.Tensor:
"""Forward pass of the Attention module.
Args:
x (torch.Tensor): The input tensor.
Returns:
(torch.Tensor): The output tensor after self-attention.
"""
B, C, H, W = x.shape
N = H * W
qkv = self.qkv(x)
q, k, v = qkv.view(B, self.num_heads, self.key_dim * 2 + self.head_dim, N).split(
[self.key_dim, self.key_dim, self.head_dim], dim=2
)
attn = (q.transpose(-2, -1) @ k) * self.scale
attn = attn.softmax(dim=-1)
x = (v @ attn.transpose(-2, -1)).view(B, C, H, W) + self.pe(v.reshape(B, C, H, W))
x = self.proj(x)
return x
class PSABlock(nn.Module):
"""PSABlock class implementing a Position-Sensitive Attention block for neural networks.
This class encapsulates the functionality for applying multi-head attention and feed-forward neural network layers
with optional shortcut connections.
Attributes:
attn (Attention): Multi-head attention module.
ffn (nn.Sequential): Feed-forward neural network module.
add (bool): Flag indicating whether to add shortcut connections.
Methods:
forward: Performs a forward pass through the PSABlock, applying attention and feed-forward layers.
"""
def __init__(self, c: int, attn_ratio: float = 0.5, num_heads: int = 4, shortcut: bool = True) -> None:
"""Initialize the PSABlock.
Args:
c (int): Input and output channels.
attn_ratio (float): Attention ratio for key dimension.
num_heads (int): Number of attention heads.
shortcut (bool): Whether to use shortcut connections.
"""
super().__init__()
self.attn = Attention_YOLOv26(c, attn_ratio=attn_ratio, num_heads=num_heads)
self.ffn = nn.Sequential(Conv(c, c * 2, 1), Conv(c * 2, c, 1, act=False))
self.add = shortcut
def forward(self, x: torch.Tensor) -> torch.Tensor:
"""Execute a forward pass through PSABlock.
Args:
x (torch.Tensor): Input tensor.
Returns:
(torch.Tensor): Output tensor after attention and feed-forward processing.
"""
x = x + self.attn(x) if self.add else self.attn(x)
x = x + self.ffn(x) if self.add else self.ffn(x)
return x
class C3k_SAConv(C3):
"""C3k is a CSP bottleneck module with customizable kernel sizes for feature extraction in neural networks."""
def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5, k=3):
"""Initializes the C3k module with specified channels, number of layers, and configurations."""
super().__init__(c1, c2, n, shortcut, g, e)
c_ = int(c2 * e) # hidden channels
# self.m = nn.Sequential(*(RepBottleneck(c_, c_, shortcut, g, k=(k, k), e=1.0) for _ in range(n)))
self.m = nn.Sequential(*(Bottleneck_SAConv(c_, c_, shortcut, g, k=(k, k), e=1.0) for _ in range(n)))
class C3k2_SAConv(C2f):
"""Faster Implementation of CSP Bottleneck with 2 convolutions."""
def __init__(
self,
c1: int,
c2: int,
n: int = 1,
c3k: bool = False,
e: float = 0.5,
attn: bool = False,
g: int = 1,
shortcut: bool = True,
):
"""Initialize C3k2 modu
Args:
c1 (int): Input channels.
c2 (int): Output channels.
n (int): Number of blocks.
c3k (bool): Whether to use C3k blocks.
e (float): Expansion ratio.
attn (bool): Whether to use attention blocks.
g (int): Groups for convolutions.
shortcut (bool): Whether to use shortcut connections.
"""
super().__init__(c1, c2, n, shortcut, g, e)
self.m = nn.ModuleList(
nn.Sequential(
Bottleneck_SAConv(self.c, self.c, shortcut, g),
PSABlock(self.c, attn_ratio=0.5, num_heads=max(self.c // 64, 1)),
)
if attn
else C3k_SAConv(self.c, self.c, 2, shortcut, g)
if c3k
else Bottleneck_SAConv(self.c, self.c, shortcut, g)
for _ in range(n)
)
if __name__ == "__main__":
# Generating Sample image
image_size = (1, 64, 240, 240)
image = torch.rand(*image_size)
# Model
mobilenet_v1 = C3k2_SAConv(64, 64)
out = mobilenet_v1(image)
print(out.size())四、手把手教你添加SAConv
下面的步骤如果你不会或者不想麻烦操作,可以联系作者获得本专栏添加所有项目文件的源代码,可直接训练.
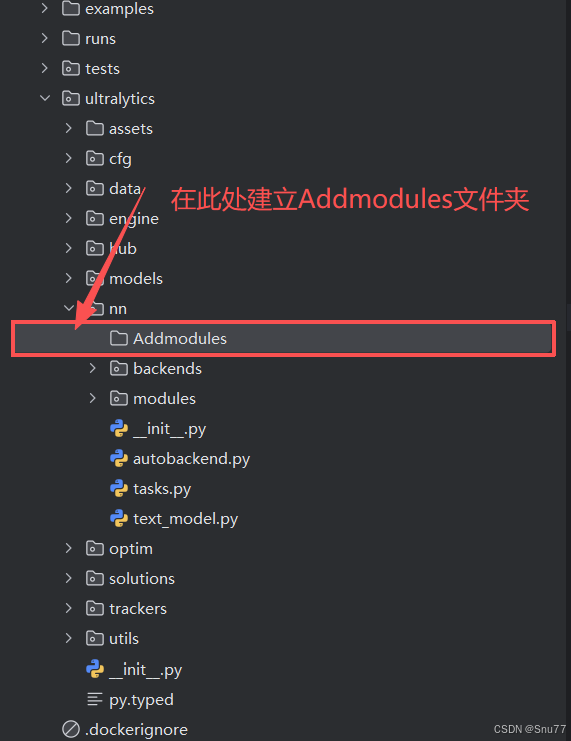
4.1 修改一
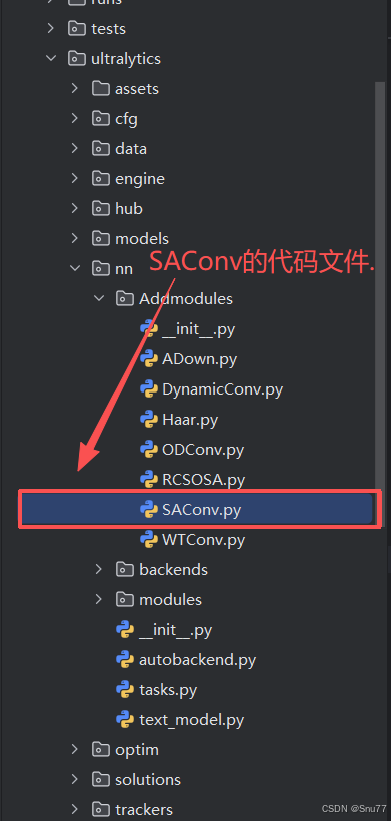
第一还是建立文件,我们找到如下ultralytics/nn文件夹下建立一个目录名字呢就是'Addmodules'文件夹!
4.2 修改二
然后在Addmodules文件夹内建立一个新的py文件,将本文章节三中的“核心代码"复制粘贴进去。
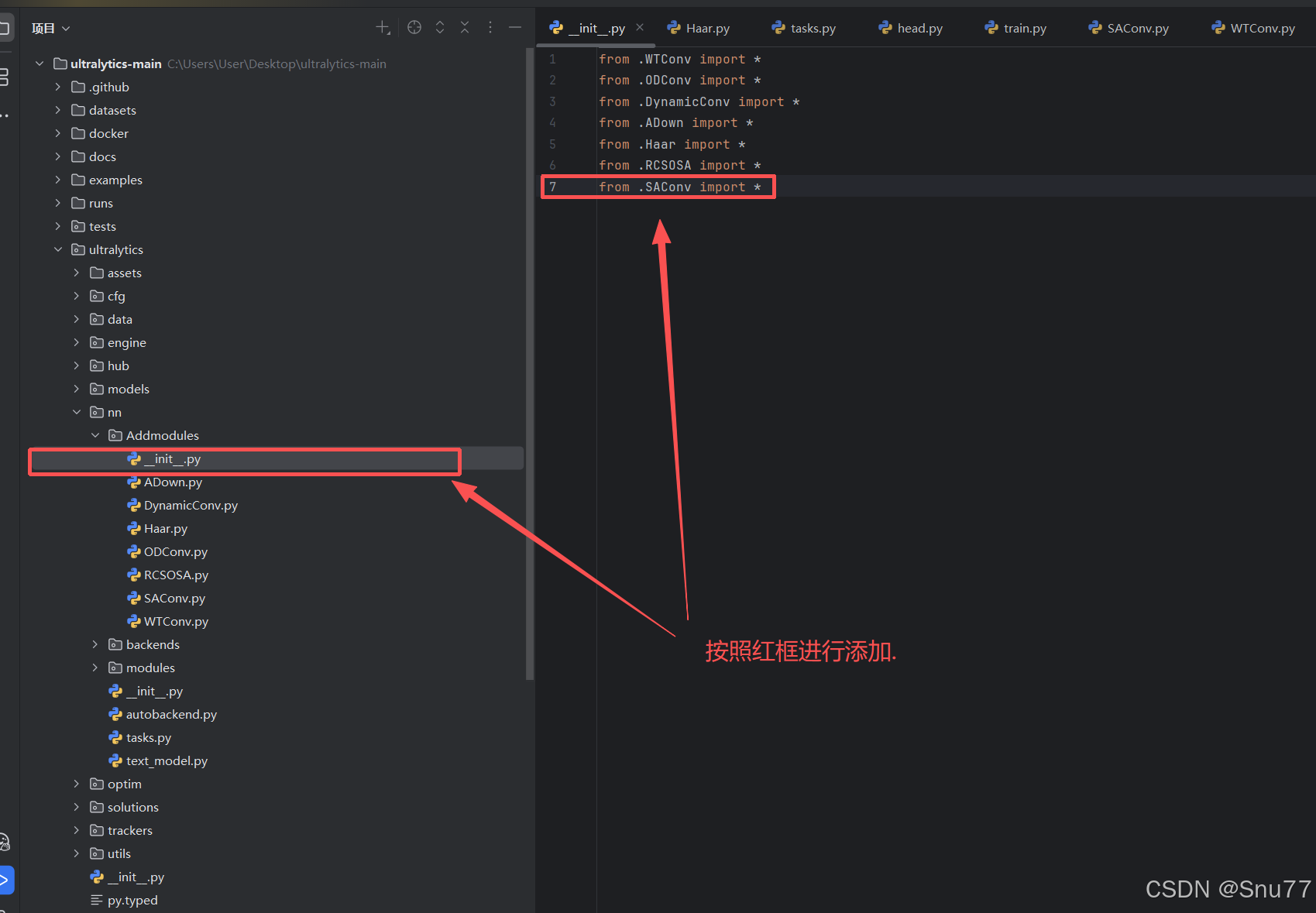
4.3 修改三
第二步我们在该目录下创建一个新的py文件名字为'__init__.py',然后在其内部导入我们的文件,如下图所示。
4.4 修改四
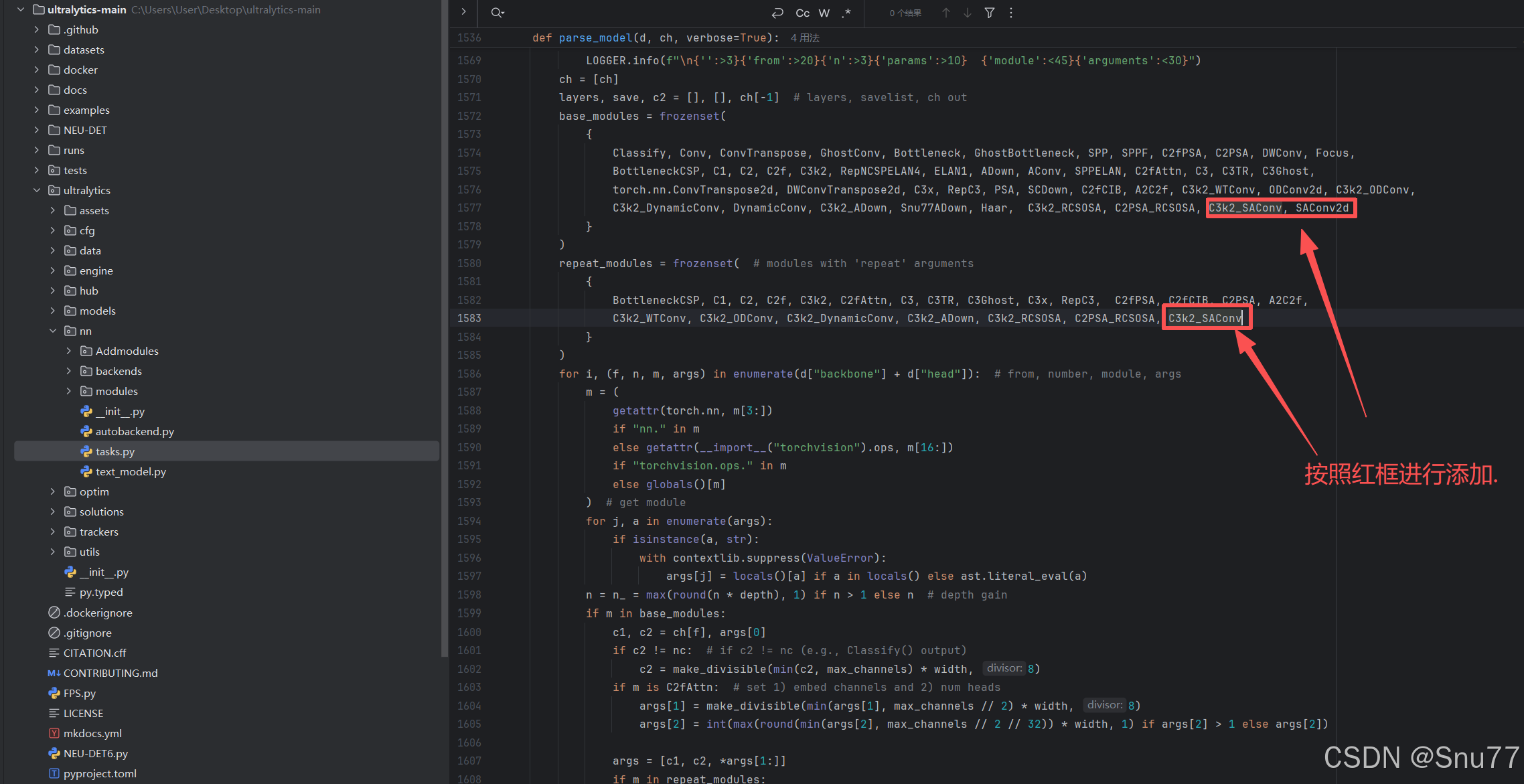
第三步我门中到如下文件'ultralytics/nn/tasks.py'进行导入和注册我们的模块(此处只需要添加一次即可,如果你用我其它的改进机制这里的步骤只需要添加一次)!

4.5 修改五
在'ultralytics/nn/tasks.py'文件内的parse_model方法函数内(位置大概在1500+行左右),按照图示位置添加即可(此处需要自己有一定的判别能力,如果不会可联系作者获得视频教程)。
4.6 修改六
在'ultralytics/nn/tasks.py'文件内的parse_model方法函数内(位置大概在1600+行左右),按照图示位置进行代码的替换即可(此处不改如果你yaml文件中的所有C3k2都被改名了,则检测头会使用老版本的v8检测头参数量会大幅度增加,但不影响运行很多人都忽略了这一步)。
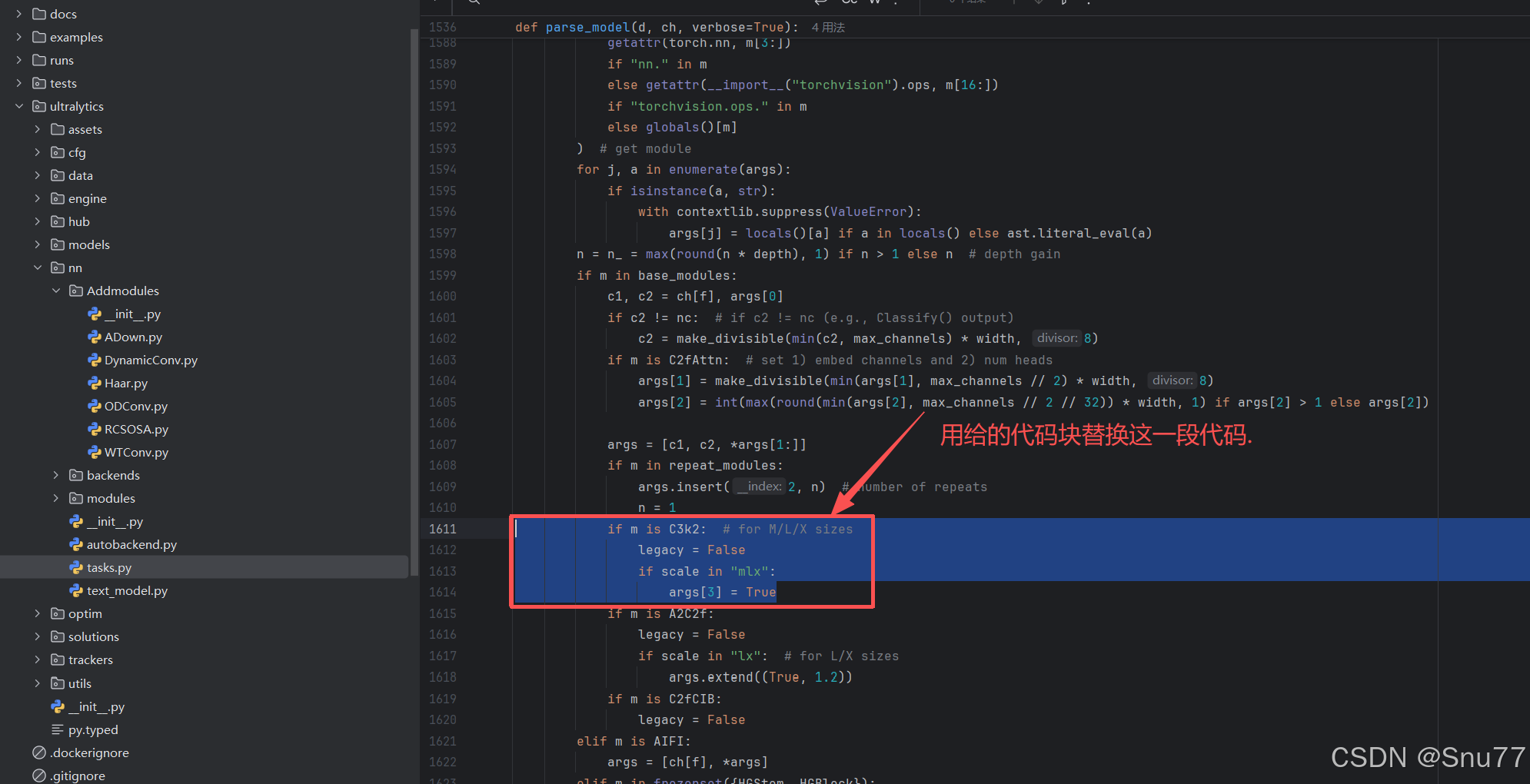
if "C3k2" in getattr(m, "__name__", str(m)):
legacy = False
if scale in "mlx":
args[3] = True到此就修改完成了,大家可以复制下面的yaml文件运行,更多使用方式可以联系作者获得使用视频,本文仅列出常见的使用方式。
五、正式训练
5.1 yaml文件
5.1.1 yaml文件1
训练信息:YOLO26-C3k2-SAConv-1 summary: 272 layers, 2,627,058 parameters, 2,627,058 gradients, 5.5 GFLOPs
# Ultralytics 🚀 AGPL-3.0 License - https://ultralytics.com/license
# Ultralytics YOLO26 object detection model with P3/8 - P5/32 outputs
# Model docs: https://docs.ultralytics.com/models/yolo26
# Task docs: https://docs.ultralytics.com/tasks/detect
# Parameters
nc: 80 # number of classes
end2end: True # whether to use end-to-end mode
reg_max: 1 # DFL bins
scales: # model compound scaling constants, i.e. 'model=yolo26n.yaml' will call yolo26.yaml with scale 'n'
# [depth, width, max_channels]
n: [0.50, 0.25, 1024] # summary: 260 layers, 2,572,280 parameters, 2,572,280 gradients, 6.1 GFLOPs
s: [0.50, 0.50, 1024] # summary: 260 layers, 10,009,784 parameters, 10,009,784 gradients, 22.8 GFLOPs
m: [0.50, 1.00, 512] # summary: 280 layers, 21,896,248 parameters, 21,896,248 gradients, 75.4 GFLOPs
l: [1.00, 1.00, 512] # summary: 392 layers, 26,299,704 parameters, 26,299,704 gradients, 93.8 GFLOPs
x: [1.00, 1.50, 512] # summary: 392 layers, 58,993,368 parameters, 58,993,368 gradients, 209.5 GFLOPs
# YOLO26n backbone
backbone:
# [from, repeats, module, args]
- [-1, 1, Conv, [64, 3, 2]] # 0-P1/2
- [-1, 1, Conv, [128, 3, 2]] # 1-P2/4
- [-1, 2, C3k2_SAConv, [256, False, 0.25]]
- [-1, 1, Conv, [256, 3, 2]] # 3-P3/8
- [-1, 2, C3k2_SAConv, [512, False, 0.25]]
- [-1, 1, Conv, [512, 3, 2]] # 5-P4/16
- [-1, 2, C3k2_SAConv, [512, True]]
- [-1, 1, Conv, [1024, 3, 2]] # 7-P5/32
- [-1, 2, C3k2_SAConv, [1024, True]]
- [-1, 1, SPPF, [1024, 5, 3, True]] # 9
- [-1, 2, C2PSA, [1024]] # 10
# YOLO26n head
head:
- [-1, 1, nn.Upsample, [None, 2, "nearest"]]
- [[-1, 6], 1, Concat, [1]] # cat backbone P4
- [-1, 2, C3k2, [512, True]] # 13
- [-1, 1, nn.Upsample, [None, 2, "nearest"]]
- [[-1, 4], 1, Concat, [1]] # cat backbone P3
- [-1, 2, C3k2, [256, True]] # 16 (P3/8-small)
- [-1, 1, Conv, [256, 3, 2]]
- [[-1, 13], 1, Concat, [1]] # cat head P4
- [-1, 2, C3k2, [512, True]] # 19 (P4/16-medium)
- [-1, 1, Conv, [512, 3, 2]]
- [[-1, 10], 1, Concat, [1]] # cat head P5
- [-1, 1, C3k2, [1024, True, 0.5, True]] # 22 (P5/32-large)
- [[16, 19, 22], 1, Detect, [nc]] # Detect(P3, P4, P5)
5.1.2 yaml文件2
训练信息:YOLO26-C3k2-SAConv-2 summary: 274 layers, 2,652,067 parameters, 2,652,067 gradients, 5.5 GFLOPs
# Ultralytics 🚀 AGPL-3.0 License - https://ultralytics.com/license
# Ultralytics YOLO26 object detection model with P3/8 - P5/32 outputs
# Model docs: https://docs.ultralytics.com/models/yolo26
# Task docs: https://docs.ultralytics.com/tasks/detect
# Parameters
nc: 80 # number of classes
end2end: True # whether to use end-to-end mode
reg_max: 1 # DFL bins
scales: # model compound scaling constants, i.e. 'model=yolo26n.yaml' will call yolo26.yaml with scale 'n'
# [depth, width, max_channels]
n: [0.50, 0.25, 1024] # summary: 260 layers, 2,572,280 parameters, 2,572,280 gradients, 6.1 GFLOPs
s: [0.50, 0.50, 1024] # summary: 260 layers, 10,009,784 parameters, 10,009,784 gradients, 22.8 GFLOPs
m: [0.50, 1.00, 512] # summary: 280 layers, 21,896,248 parameters, 21,896,248 gradients, 75.4 GFLOPs
l: [1.00, 1.00, 512] # summary: 392 layers, 26,299,704 parameters, 26,299,704 gradients, 93.8 GFLOPs
x: [1.00, 1.50, 512] # summary: 392 layers, 58,993,368 parameters, 58,993,368 gradients, 209.5 GFLOPs
# YOLO26n backbone
backbone:
# [from, repeats, module, args]
- [-1, 1, Conv, [64, 3, 2]] # 0-P1/2
- [-1, 1, Conv, [128, 3, 2]] # 1-P2/4
- [-1, 2, C3k2, [256, False, 0.25]]
- [-1, 1, Conv, [256, 3, 2]] # 3-P3/8
- [-1, 2, C3k2, [512, False, 0.25]]
- [-1, 1, Conv, [512, 3, 2]] # 5-P4/16
- [-1, 2, C3k2, [512, True]]
- [-1, 1, Conv, [1024, 3, 2]] # 7-P5/32
- [-1, 2, C3k2, [1024, True]]
- [-1, 1, SPPF, [1024, 5, 3, True]] # 9
- [-1, 2, C2PSA, [1024]] # 10
# YOLO26n head
head:
- [-1, 1, nn.Upsample, [None, 2, "nearest"]]
- [[-1, 6], 1, Concat, [1]] # cat backbone P4
- [-1, 2, C3k2_SAConv, [512, True]] # 13
- [-1, 1, nn.Upsample, [None, 2, "nearest"]]
- [[-1, 4], 1, Concat, [1]] # cat backbone P3
- [-1, 2, C3k2_SAConv, [256, True]] # 16 (P3/8-small)
- [-1, 1, Conv, [256, 3, 2]]
- [[-1, 13], 1, Concat, [1]] # cat head P4
- [-1, 2, C3k2_SAConv, [512, True]] # 19 (P4/16-medium)
- [-1, 1, Conv, [512, 3, 2]]
- [[-1, 10], 1, Concat, [1]] # cat head P5
- [-1, 1, C3k2_SAConv, [1024, True, 0.5, True]] # 22 (P5/32-large)
- [[16, 19, 22], 1, Detect, [nc]] # Detect(P3, P4, P5)
5.1.3 yaml文件3
训练信息:YOLO26-C3k2-SAConv-3 summary: 286 layers, 2,772,985 parameters, 2,772,985 gradients, 5.3 GFLOPs
# Ultralytics 🚀 AGPL-3.0 License - https://ultralytics.com/license
# Ultralytics YOLO26 object detection model with P3/8 - P5/32 outputs
# Model docs: https://docs.ultralytics.com/models/yolo26
# Task docs: https://docs.ultralytics.com/tasks/detect
# Parameters
nc: 80 # number of classes
end2end: True # whether to use end-to-end mode
reg_max: 1 # DFL bins
scales: # model compound scaling constants, i.e. 'model=yolo26n.yaml' will call yolo26.yaml with scale 'n'
# [depth, width, max_channels]
n: [0.50, 0.25, 1024] # summary: 260 layers, 2,572,280 parameters, 2,572,280 gradients, 6.1 GFLOPs
s: [0.50, 0.50, 1024] # summary: 260 layers, 10,009,784 parameters, 10,009,784 gradients, 22.8 GFLOPs
m: [0.50, 1.00, 512] # summary: 280 layers, 21,896,248 parameters, 21,896,248 gradients, 75.4 GFLOPs
l: [1.00, 1.00, 512] # summary: 392 layers, 26,299,704 parameters, 26,299,704 gradients, 93.8 GFLOPs
x: [1.00, 1.50, 512] # summary: 392 layers, 58,993,368 parameters, 58,993,368 gradients, 209.5 GFLOPs
# YOLO26n backbone
backbone:
# [from, repeats, module, args]
- [-1, 1, Conv, [64, 3, 2]] # 0-P1/2
- [-1, 1, Conv, [128, 3, 2]] # 1-P2/4
- [-1, 2, C3k2_SAConv, [256, False, 0.25]]
- [-1, 1, Conv, [256, 3, 2]] # 3-P3/8
- [-1, 2, C3k2_SAConv, [512, False, 0.25]]
- [-1, 1, Conv, [512, 3, 2]] # 5-P4/16
- [-1, 2, C3k2_SAConv, [512, True]]
- [-1, 1, Conv, [1024, 3, 2]] # 7-P5/32
- [-1, 2, C3k2_SAConv, [1024, True]]
- [-1, 1, SPPF, [1024, 5, 3, True]] # 9
- [-1, 2, C2PSA, [1024]] # 10
# YOLO26n head
head:
- [-1, 1, nn.Upsample, [None, 2, "nearest"]]
- [[-1, 6], 1, Concat, [1]] # cat backbone P4
- [-1, 2, C3k2_SAConv, [512, True]] # 13
- [-1, 1, nn.Upsample, [None, 2, "nearest"]]
- [[-1, 4], 1, Concat, [1]] # cat backbone P3
- [-1, 2, C3k2_SAConv, [256, True]] # 16 (P3/8-small)
- [-1, 1, Conv, [256, 3, 2]]
- [[-1, 13], 1, Concat, [1]] # cat head P4
- [-1, 2, C3k2_SAConv, [512, True]] # 19 (P4/16-medium)
- [-1, 1, Conv, [512, 3, 2]]
- [[-1, 10], 1, Concat, [1]] # cat head P5
- [-1, 1, C3k2_SAConv, [1024, True, 0.5, True]] # 22 (P5/32-large)
- [[16, 19, 22], 1, Detect, [nc]] # Detect(P3, P4, P5)
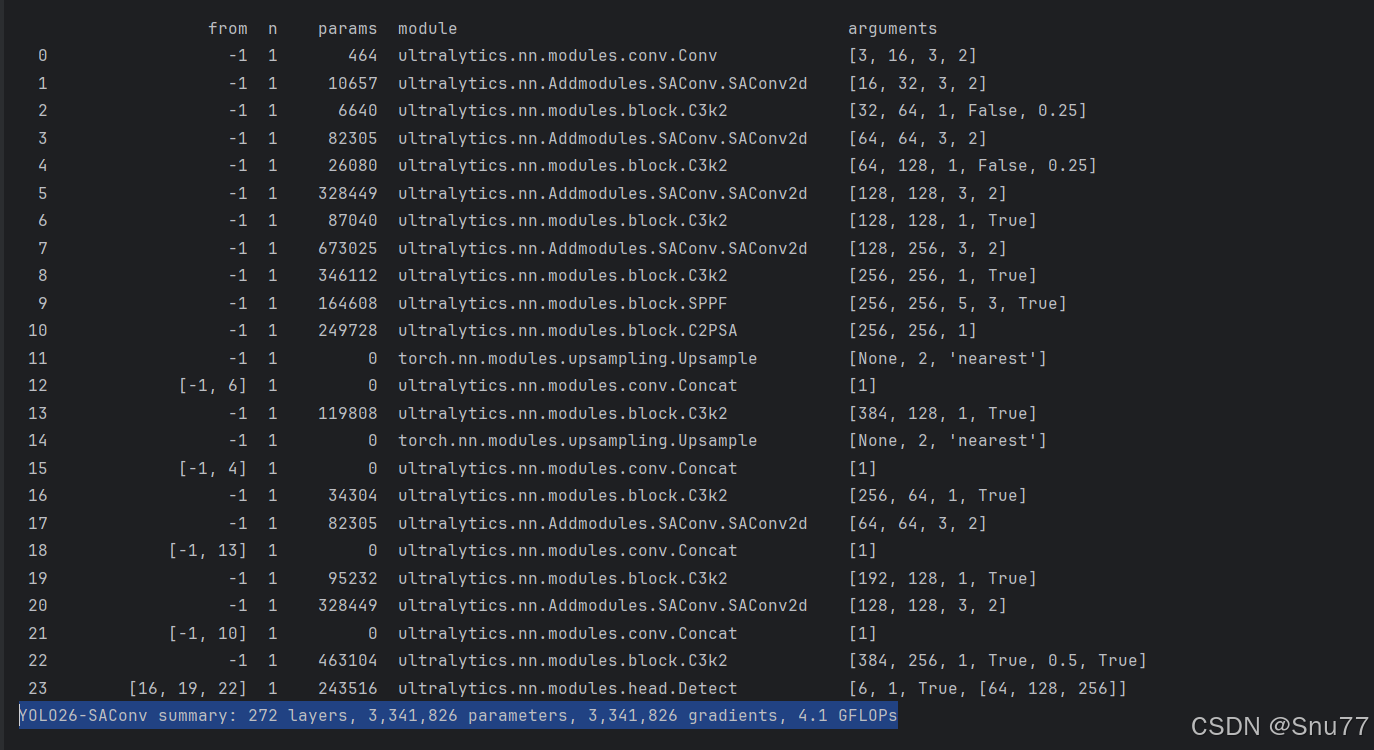
5.1.4 yaml文件4
训练信息:YOLO26-SAConv summary: 272 layers, 3,341,826 parameters, 3,341,826 gradients, 4.1 GFLOPs
# Ultralytics 🚀 AGPL-3.0 License - https://ultralytics.com/license
# Ultralytics YOLO26 object detection model with P3/8 - P5/32 outputs
# Model docs: https://docs.ultralytics.com/models/yolo26
# Task docs: https://docs.ultralytics.com/tasks/detect
# Parameters
nc: 80 # number of classes
end2end: True # whether to use end-to-end mode
reg_max: 1 # DFL bins
scales: # model compound scaling constants, i.e. 'model=yolo26n.yaml' will call yolo26.yaml with scale 'n'
# [depth, width, max_channels]
n: [0.50, 0.25, 1024] # summary: 260 layers, 2,572,280 parameters, 2,572,280 gradients, 6.1 GFLOPs
s: [0.50, 0.50, 1024] # summary: 260 layers, 10,009,784 parameters, 10,009,784 gradients, 22.8 GFLOPs
m: [0.50, 1.00, 512] # summary: 280 layers, 21,896,248 parameters, 21,896,248 gradients, 75.4 GFLOPs
l: [1.00, 1.00, 512] # summary: 392 layers, 26,299,704 parameters, 26,299,704 gradients, 93.8 GFLOPs
x: [1.00, 1.50, 512] # summary: 392 layers, 58,993,368 parameters, 58,993,368 gradients, 209.5 GFLOPs
# YOLO26n backbone
backbone:
# [from, repeats, module, args]
- [-1, 1, Conv, [64, 3, 2]] # 0-P1/2
- [-1, 1, SAConv2d, [128, 3, 2]] # 1-P2/4
- [-1, 2, C3k2, [256, False, 0.25]]
- [-1, 1, SAConv2d, [256, 3, 2]] # 3-P3/8
- [-1, 2, C3k2, [512, False, 0.25]]
- [-1, 1, SAConv2d, [512, 3, 2]] # 5-P4/16
- [-1, 2, C3k2, [512, True]]
- [-1, 1, SAConv2d, [1024, 3, 2]] # 7-P5/32
- [-1, 2, C3k2, [1024, True]]
- [-1, 1, SPPF, [1024, 5, 3, True]] # 9
- [-1, 2, C2PSA, [1024]] # 10
# YOLO26n head
head:
- [-1, 1, nn.Upsample, [None, 2, "nearest"]]
- [[-1, 6], 1, Concat, [1]] # cat backbone P4
- [-1, 2, C3k2, [512, True]] # 13
- [-1, 1, nn.Upsample, [None, 2, "nearest"]]
- [[-1, 4], 1, Concat, [1]] # cat backbone P3
- [-1, 2, C3k2, [256, True]] # 16 (P3/8-small)
# - [-1, 1, Conv, [256, 3, 2]]
- [-1, 1, SAConv2d, [256, 3, 2]] # 和上面一层二选一.
- [[-1, 13], 1, Concat, [1]] # cat head P4
- [-1, 2, C3k2, [512, True]] # 19 (P4/16-medium)
# - [-1, 1, Conv, [512, 3, 2]]
- [-1, 1, SAConv2d, [512, 3, 2]] # 和上面一层二选一.
- [[-1, 10], 1, Concat, [1]] # cat head P5
- [-1, 1, C3k2, [1024, True, 0.5, True]] # 22 (P5/32-large)
- [[16, 19, 22], 1, Detect, [nc]] # Detect(P3, P4, P5)
5.2 训练代码
大家可以创建一个py文件将我给的代码复制粘贴进去,配置好自己的文件路径即可运行。
import warnings
warnings.filterwarnings('ignore')
from ultralytics import YOLO
if __name__ == '__main__':
model = YOLO('模型配置文件地址,也就是5.1你保存到本地文件的地址')
# 如何切换模型版本, 上面的ymal文件可以改为 yolo26s.yaml就是使用的26s,
# 类似某个改进的yaml文件名称为yolo26-XXX.yaml那么如果想使用其它版本就把上面的名称改为yolo26l-XXX.yaml即可(改的是上面YOLO中间的名字不是配置文件的)!
# model.load('yolo26n.pt') # 是否加载预训练权重,科研不建议大家加载否则很难提升精度
model.train(
data=r"数据集文件地址",
# 如果大家任务是其它的'ultralytics/cfg/default.yaml'找到这里修改task可以改成detect, segment, classify, pose
cache=False,
imgsz=640,
epochs=20,
single_cls=False, # 是否是单类别检测
batch=16,
close_mosaic=0,
workers=0,
device='0',
optimizer='MuSGD', # using SGD/MuSGD
# resume=, # 这里是填写last.pt地址
amp=True, # 如果出现训练损失为Nan可以关闭amp
project='runs/train',
name='exp',
)
5.3 训练过程截图
五、本文总结
到此本文的正式分享内容就结束了,在这里给大家推荐我的YOLOv26改进有效涨点专栏,本专栏目前为新开的平均质量分98分,后期我会根据各种最新的前沿顶会进行论文复现,也会对一些老的改进机制进行补充,如果大家觉得本文帮助到你了,订阅本专栏,关注后续更多的更新~
专栏链接:YOLOv26有效涨点专栏包含:Conv、注意力机制、主干/Backbone、损失函数、优化器、后处理等改进机制


AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐

 9
9 0
0- 0



 已为社区贡献17条内容
已为社区贡献17条内容

所有评论(0)