使用逐飞开源库 STC32G12K128 时编码器不能读数的问题排查:初始化 IO 输出为低导致输入电平被拉低
作者:普地编码器 PDEncoder 技术团队
在智能车、机器人小车、电机测速等项目中,编码器是非常常见的速度反馈器件。很多同学在使用 STC32G12K128 配合 逐飞开源库 调试编码器时,可能会遇到一个现象:
编码器接线正常,电源正常,电机也在转,但是程序里面编码器计数始终没有变化,或者读数一直为 0。
这个问题看起来像是编码器坏了,也像是定时器配置错误,但实际原因可能非常简单:
初始化时 IO 输出状态被设置为了低电平,导致编码器输入信号被 MCU 端拉低,最终无法正常读取脉冲。
一、问题现象
在调试过程中,常见表现如下:
-
编码器 Pluse/Dir 相已经接到单片机对应引脚;
-
编码器供电电压正常,例如 5V 或 3.3V;
-
电机转动时,用手感觉编码器机械部分正常;
-
程序调用编码器读取函数,但计数值一直不变;
-
示波器或逻辑分析仪测量时,发现编码器输出信号电平异常偏低;
-
将编码器从单片机 IO 上断开后,编码器自身输出又恢复正常。
这类现象很容易误判为:
-
编码器损坏;
-
定时器编码器模式配置错误;
-
中断没有打开;
-
逐飞库函数调用错误;
-
编码器供电不足。
但如果编码器断开 MCU 后信号正常,接上 MCU 后信号被拉低,就要重点检查 IO 初始化方向和输出状态。
二、核心原因
问题的核心是:
在初始化编码器引脚时,IO 被配置成了某种会主动输出低电平的状态,导致编码器输出信号被单片机端强行拉低。
对于 MCU 来说,这两个引脚应该作为 输入引脚 使用,而不是作为普通推挽输出使用。
如果初始化时把 IO 设置成输出低电平,或者在切换为输入功能前先输出了低电平,就可能出现以下情况:
编码器输出高电平 → MCU IO 端被配置为低电平输出
→ 两边形成冲突
→ 信号被拉低
→ MCU 无法识别有效脉冲
最终结果就是:
编码器本来有脉冲,但 MCU 看到的始终是低电平或异常波形。
三、为什么这个问题容易被忽略?
因为很多同学在使用开源库时,通常会直接调用初始化函数,不会特别关注底层 GPIO 的初始化参数。
例如在一些初始化封装中,可能会看到类似这样的参数:
gpio_init(pin, mode, output_value, pull_mode);
或者类似的 IO 初始化函数:
gpio_mode(pin, mode, value);
其中某个参数可能代表:
-
初始输出电平;
-
上拉/下拉状态;
-
输入输出模式;
-
复用功能;
-
高阻输入或准双向口。
如果这个参数被设置成 低电平输出,就可能影响编码器输入。
尤其是在 STC 系列单片机中,IO 模式本身有多种配置方式,例如:
-
准双向口;
-
推挽输出;
-
高阻输入;
-
开漏输出。
如果编码器信号引脚没有正确设置为输入状态,或者被初始化成低电平输出,就可能导致信号无法被正常读取。
四、解决方法:修改初始化参数
解决方法很简单:
把编码器相关 IO 初始化参数从“输出低电平”改为“输入状态”或“不主动拉低”的状态。
具体修改位置要根据你使用的逐飞库版本和工程结构来确定,一般可以重点检查以下几个地方:
encoder_init();
或者:
gpio_init();
以及编码器初始化中对应 A/B 相引脚的 GPIO 配置。
错误思路一般类似:
// 示例:错误配置,可能会导致 IO 主动拉低
gpio_init(ENCODER_A_PIN, GPO, 0, GPIO_PIN_CONFIG);
gpio_init(ENCODER_B_PIN, GPO, 0, GPIO_PIN_CONFIG);
正确思路应该是:
// 示例:正确配置,应配置为输入或复用输入
gpio_init(ENCODER_A_PIN, GPI, 1, GPIO_PIN_CONFIG);
gpio_init(ENCODER_B_PIN, GPI, 1, GPIO_PIN_CONFIG);
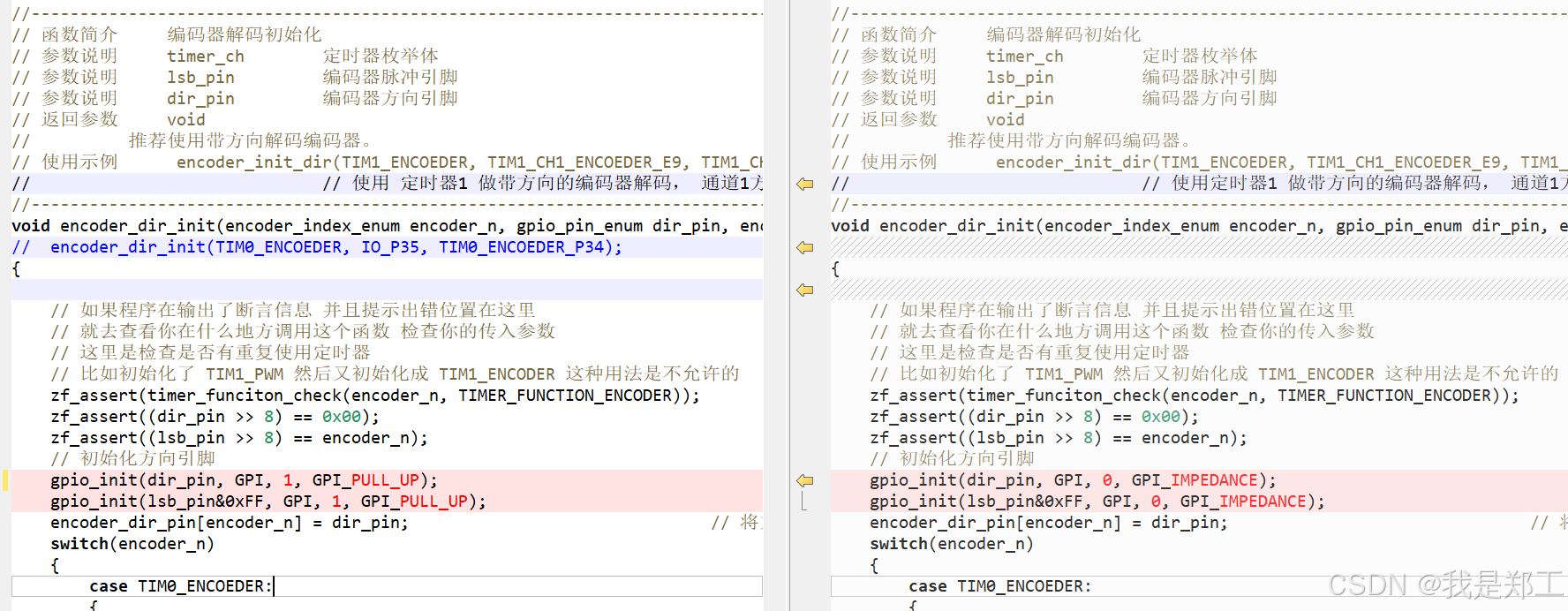
按以上方法修改\Libraries\zf_driver\zf_driver_encoder.c 文件就可以解决编码器读不到的问题。
五、推荐排查步骤
遇到编码器不能读数时,建议按下面顺序排查。
1. 先确认硬件连接
检查:
-
编码器 VCC 是否接对;
-
GND 是否与主控板共地;
-
A 相、B 相是否接到正确引脚;
-
编码器输出电压是否与 MCU 输入电平兼容;
-
是否需要上拉电阻。
很多编码器是开漏输出或 NPN 输出,如果没有上拉,信号也可能无法正常变成高电平。
2. 用万用表或示波器看 A/B 相电平
如果条件允许,最好使用示波器或逻辑分析仪。
观察两种状态:
编码器未接 MCU 时:
A/B 相是否有正常高低电平变化?
编码器接上 MCU 后:
A/B 相是否被拉低?
波形幅度是否明显变小?
高电平是否上不去?
如果断开 MCU 正常,接上 MCU 异常,大概率就是 MCU 端 IO 配置或硬件输入阻抗问题。
3. 检查 IO 初始化模式
重点检查编码器引脚是否被配置为:
-
普通输出;
-
推挽输出;
-
初始输出低;
-
下拉输入;
-
其他外设功能冲突。
对于编码器输入,通常应优先选择:
-
输入模式;
-
上拉输入;
-
高阻输入加外部上拉;
-
定时器编码器复用输入模式。
4. 检查引脚是否被其他模块占用
有时同一个引脚可能同时被配置给:
-
UART;
-
PWM;
-
ADC;
-
普通 GPIO;
-
定时器输入;
-
编码器输入。
如果初始化顺序不对,后面的模块可能把前面配置好的编码器引脚重新改掉。
建议在工程中全局搜索编码器相关引脚,例如:
Pxx
ENCODER_A
ENCODER_B
TIMx_CHx
确认这些引脚只被编码器功能使用。
六、普地编码器应用提示
普地编码器在智能车、机器人小车、自动化设备中,常见输出方式包括:
-
正交增量输出;
-
带方向输出;
-
SPI输出;
-
模拟电压输出;
-
RS485 通讯输出;
在智能车项目中,如果使用 MCU 直接读取 A/B 相信号,建议优先确认以下几点:
| 项目 | 建议 |
|---|---|
| 输出方式 | 优先选择与 MCU 输入电平兼容的 AB 相输出 |
| 供电电压 | 确认 3.3V / 5V 是否匹配 |
| 上拉方式 | 开漏/NPN 输出需要合适上拉 |
| IO配置 | 编码器引脚必须为输入或外设输入 |
| 抗干扰 | 编码器线远离电机线,必要时加滤波 |
编码器本身只是提供脉冲信号,真正能不能稳定读数,还取决于主控 IO 配置、电源、接线和软件初始化是否正确。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐

 9
9 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)