【路径规划】基于Gurobi规约求解带截止时间的多机器人路径规划问题附matlab代码
✅作者简介:热爱科研的Matlab仿真开发者,擅长毕业设计辅导、数学建模、数据处理、程序设计科研仿真。
🍎完整代码获取 定制创新 论文复现点击:Matlab科研工作室
👇 关注我领取海量matlab电子书和数学建模资料
🍊个人信条:做科研,博学之、审问之、慎思之、明辨之、笃行之,是为:博学慎思,明辨笃行。
🔥 内容介绍
一、引言
多机器人路径规划在现代工业、物流、仓储等领域有着广泛应用。当任务具有截止时间限制时,路径规划变得更加复杂,需要在满足时间约束的前提下,为多个机器人规划出无冲突且高效的路径。Gurobi 作为一款强大的数学规划求解器,通过将多机器人路径规划问题规约为特定的数学模型,能够有效解决此类复杂问题,实现机器人路径的优化规划。
二、问题描述
(一)场景设定
假设有 n 个机器人,在一个二维或三维的工作空间中执行任务。工作空间存在各种障碍物,机器人需要在避开障碍物的同时,从各自初始位置移动到目标位置。每个机器人的任务都有一个截止时间 Ti(i=1,2,⋯,n),即必须在该时间点前到达目标位置。
(二)路径规划要求
-
无冲突性:多个机器人在运动过程中不能发生碰撞,包括机器人之间的碰撞以及机器人与障碍物的碰撞。
-
时间约束满足:每个机器人都要在其截止时间内完成任务,到达目标位置。
-
路径优化:在满足上述条件的基础上,尽可能优化路径长度或其他性能指标,如总移动步数、能量消耗等。
三、基于 Gurobi 的问题规约
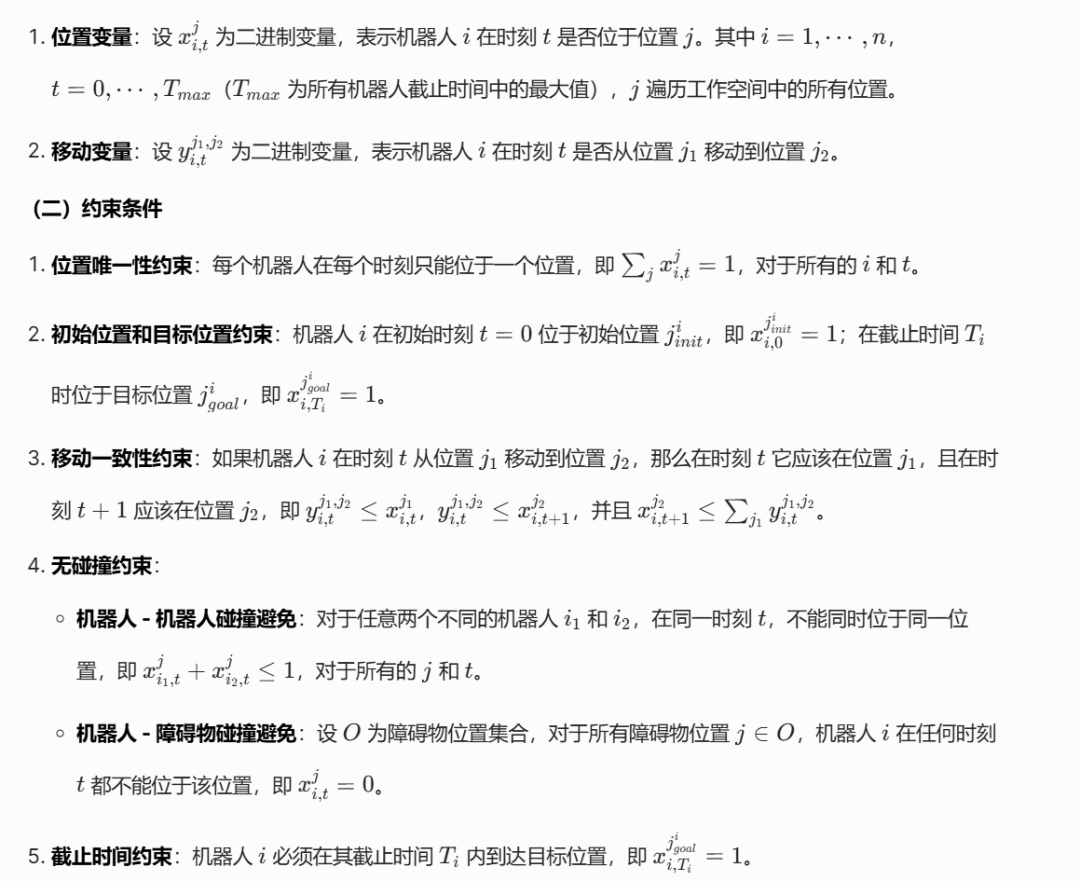
(一)变量定义
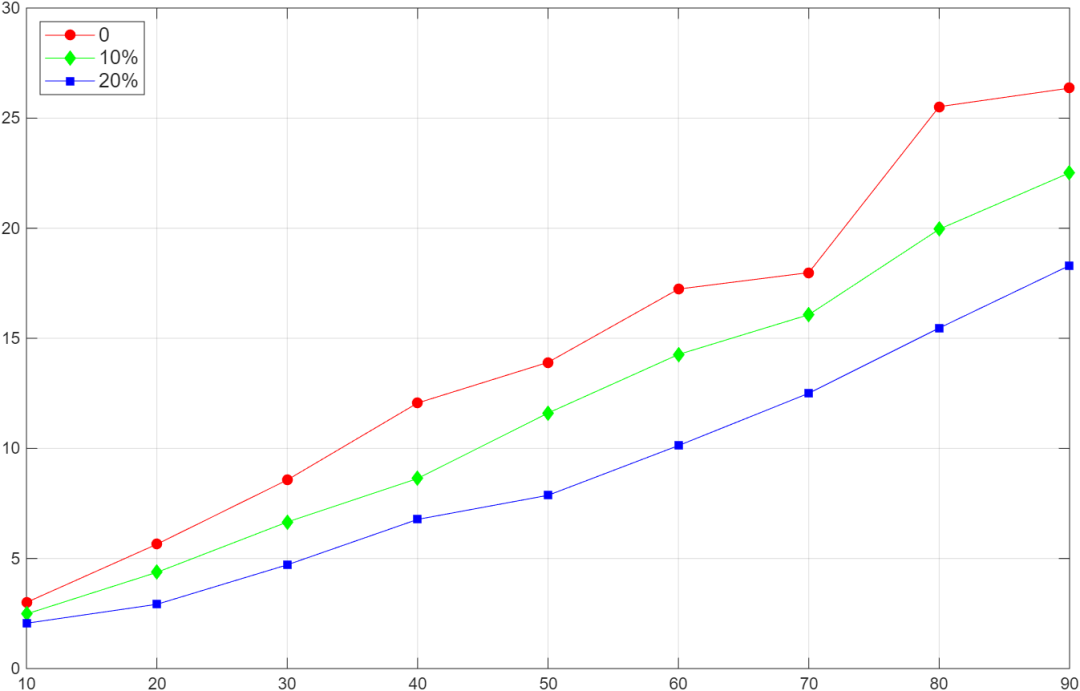
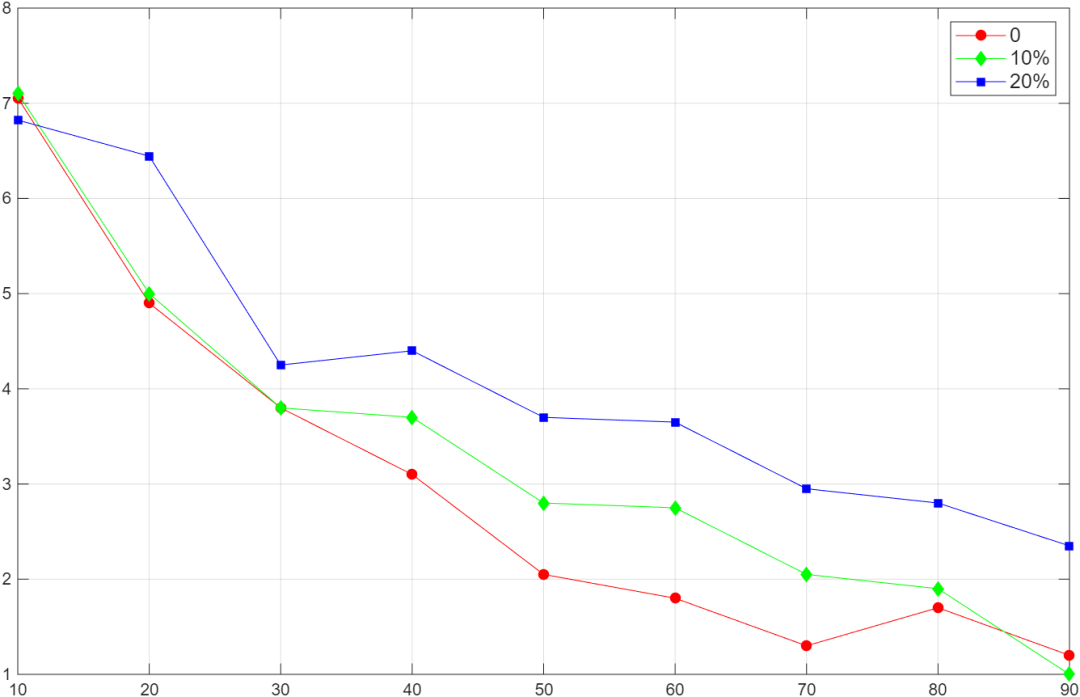
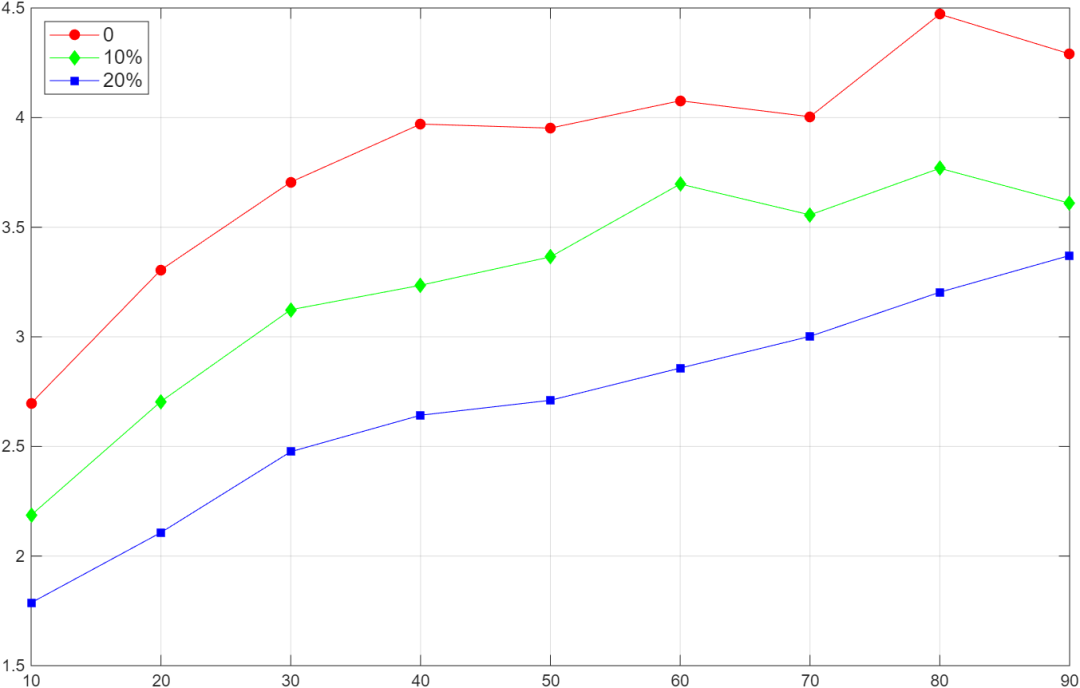
⛳️ 运行结果
📣 部分代码
clear;
clc;
objectiveSelect = 6;
printInfo = false;
load('instances20x20x0%.mat');
typeNum = size(InstanceSet,1);
instanceNum = size(InstanceSet,2);
Results = cell(typeNum,instanceNum);
for typeID = 1:typeNum
for instanceID = 1:instanceNum
instance = InstanceSet{typeID,instanceID};
fprintf("Solving instance20x20x0-%d-%d with robot number %d\n",typeID,instanceID,instance.RobotNum);
mat = instance.GoalRCT;
mat(:,3) = 5;
Results{typeID,instanceID} = MRPP(instance.RobotNum,instance.Map,instance.StartRCT,mat,objectiveSelect,printInfo,0);
save('AMRPP-DT-Results20x20x0-tardiness','Results');
end
end
load('instances20x20x10%.mat');
typeNum = size(InstanceSet,1);
instanceNum = size(InstanceSet,2);
Results = cell(typeNum,instanceNum);
for typeID = 1:typeNum
for instanceID = 1:instanceNum
instance = InstanceSet{typeID,instanceID};
fprintf("Solving instance20x20x10-%d-%d with robot number %d\n",typeID,instanceID,instance.RobotNum);
mat = instance.GoalRCT;
mat(:,3) = 5;
Results{typeID,instanceID} = MRPP(instance.RobotNum,instance.Map,instance.StartRCT,mat,objectiveSelect,printInfo,0);
save('AMRPP-DT-Results20x20x10-tardiness','Results');
end
end
load('instances20x20x20%.mat');
typeNum = size(InstanceSet,1);
instanceNum = size(InstanceSet,2);
Results = cell(typeNum,instanceNum);
for typeID = 1:typeNum
for instanceID = 1:instanceNum
instance = InstanceSet{typeID,instanceID};
fprintf("Solving instance20x20x20-%d-%d with robot number %d\n",typeID,instanceID,instance.RobotNum);
mat = instance.GoalRCT;
mat(:,3) = 5;
Results{typeID,instanceID} = MRPP(instance.RobotNum,instance.Map,instance.StartRCT,mat,objectiveSelect,printInfo,0);
save('AMRPP-DT-Results20x20x20-tardiness','Results');
end
end
🔗 参考文献
🍅更多免费数学建模和仿真教程关注领取

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐

 0
0 0
0- 0



 已为社区贡献191条内容
已为社区贡献191条内容

所有评论(0)