【Wenfan Wu + 2026-01 OM】基于物理的标定方法改善切萨皮克湾跨尺度水动力模拟
Improving cross-scale hydrodynamic simulations in the Chesapeake Bay with physically based calibration
基于物理的标定方法改善切萨皮克湾跨尺度水动力模拟
Wenfan Wu a,∗^{a,\ast}a,∗ , Zhengui Wang a^{a}a , Y Joseph Zhang a^{a}a , Jian Shen a^{a}a , Richard Tian b,c^{b,c}b,c , Lewis C Linker b^{b}b , Carl F Cerco d^{d}d
a^{a}a 弗吉尼亚海洋科学研究所,威廉与玛丽学院,格洛斯特角,VA 23062,美国
b^{b}b 美国环境保护署,切萨皮克湾项目办公室,安纳波利斯,MD 21401,美国
c^{c}c 马里兰大学环境科学中心,马里兰大学,安纳波利斯,MD 21613,美国
d^{d}d Arlluk Technology Solutions, LLC. 4840 Westfields Blvd, Ste 200, Chantilly, VA 20151,美国
这篇论文的核心是通过基于物理过程的模型标定方法,显著提升了切萨皮克湾跨尺度水动力模拟的精度。研究利用高分辨率非结构网格模型(SCHISM),摒弃了传统的水深平滑处理,转而引入两种由观测数据驱动的空间异质性参数化方案:一是利用卫星反演的Kd490数据划分Jerlov水体类型,以刻画高浊度水体对太阳辐射衰减及水温结构的影响;二是基于实测沉积物组成(泥、沙、砾石)计算空间变化的曼宁系数,以更真实地反映底摩擦对潮汐传播和盐水入侵的控制作用。结果表明,与以往研究相比,这套物理标定流程将全湾121个长期监测站点的表层/底层温度均方根误差降至约0.48/0.78°C,盐度误差降至约0.81/1.33 PSU,整体误差降低了约60%,并且成功捕捉了飓风等极端事件下的水动力响应。研究强调,在水深得到真实还原的前提下,基于观测约束的物理标定是实现跨尺度、可信赖水动力模拟的有效途径。
文章信息
关键词:SCHISM,切萨皮克湾,跨尺度,浊度,沉积物类型
摘要
河口作为陆海过渡带,呈现出高度非线性的跨尺度水动力过程,给数值模拟带来了巨大挑战。本文以切萨皮克湾为例,展示了一种基于物理的标定流程,该流程采用观测导出的参数化方案,并结合不使用水深平滑处理的高分辨率非结构网格模型。结果表明,高浑浊水体显著影响太阳辐射的下行穿透,尤其是在上湾和支流中。通过引入基于卫星Kd490数据导出的空间变化的Jerlov水体类型,我们系统地改善了全湾的水温模拟,在美国环保署切萨皮克湾项目维护的121个长期监测站上,将表层(底层)水温的平均均方根误差降低至0.484°C (0.775°C)。此外,发现泥层有助于支流中的潮汐传播,从而增强那里的盐水入侵。通过应用根据观测沉积物类型计算的空间变化底部拖曳系数,我们显著改善了盐度模拟,表层(底层)盐度的平均均方根误差为0.809 PSU (1.331 PSU)。总的来说,与先前在该湾的模拟研究相比,本研究将温度和盐度误差减少了约60%。这项研究强调了基于物理的标定流程的优势,该流程有助于使模型结果更具可信度。
1. 引言
河口是陆海之间的过渡带,在广泛的空间和时间尺度上表现出复杂的非线性水动力过程。这些过程受到多种物理因素的影响,包括潮汐强迫、河流输入、风场格局和岸线几何形状(Geyer & MacCready, 2014)。切萨皮克湾(以下简称"湾")是美国最大的河口,是一个典型的微潮、部分分层河口,显示出显著的季节和年际变化(Xu et al., 2012; Du & Shen, 2016)。这个河口-陆架-海洋连续体从北到南绵延超过250公里,以其复杂的支流网络而闻名,这些支流提供重要的生态服务(Bilkovic et al., 2019)。数十条支流(如萨斯奎哈纳河、波托马克河和拉帕汉诺克河)输送大量的淡水、沉积物和营养物质,深刻影响着湾的水动力学和生物地球化学过程(Schubel & Pritchard, 1986; Du & Shen, 2017)。除了营养物质负荷外,湾的形态(例如湾中部的深水盆地)在夏季缺氧现象的发生中起着重要作用(Du et al., 2018a; Cai et al., 2022)。
近几十年来,人们通过观测和数值模拟投入了大量精力来理解湾的水动力学(Levinson et al., 1998; Scully et al., 2005; Zhong et al., 2008)。现场观测通常在空间和时间上有限,因此数值模型已成为理解该区域水动力过程和支持生态研究不可或缺的工具(Cerco & Cole, 1993; Irby et al., 2016)。大多数建模工作集中在湾的主干(Li & Li, 2011; Hong & Shen, 2012; Xu et al., 2012),很少有研究阐明支流、主干和沿海海洋之间的跨尺度联系(Jiang & Xia, 2016)。这一限制仍然是整个海湾稳健水动力模拟的主要挑战。
这种建模空白部分源于小溪和支流中发现的小尺度地形特征的固有复杂性。这些区域通常以水浅和狭窄(且经常被疏浚)的河道为特征,需要在横向和纵向两个方向上都具有高空间分辨率,以准确解析模型域内的空间连通性(Shen & Haas, 2004; Ye et al., 2018; Tian, 2019)。已知这些小尺度特征在湾的水动力和富营养化过程中发挥着重要作用(Zhong et al., 2008; Du & Shen, 2017)。例如,在漏斗形河口中,由于几何收敛和波浪反射,潮波在向陆传播过程中可能被放大,从而增强淡水和咸水之间的混合(Friedrichs & Aubrey, 1994; Lanzoni & Seminara, 1998)。此外,某些支流几何形状可能促进潮汐共振(Zhong et al., 2008; Bonneton et al., 2015)。在浅水河口中,底摩擦通常主导潮汐阻尼(Lyu & Zhu, 2018),这对数值模型中底边界过程的参数化提出了更严格的要求。水深、几何形状和物理强迫因素(如河道形态调节的摩擦阻尼)之间的非线性相互作用使得模拟湾中的过程具有挑战性(Van Rijn, 2010; Du et al., 2018b)。
此外,跨尺度河口连续体的水文特征通常表现出显著的空间异质性,这是由一系列物理过程驱动的。支流和小溪主要受近岸过程影响,如河流流量、岸线侵蚀和人为活动(Shen & Lin, 2006; Tian et al., 2019),而湾的主干则受到沿海海洋和支流的共同影响,包括潮汐强迫、大尺度环流和淡水流入(Zhong et al., 2008; Du & Shen, 2017)。例如,受河流输入的影响,浊度水平通常在河流上游最高,并趋向于向下游降低,如遥感和现场观测所示(Wang et al., 2009; Turner et al., 2021)。相比之下,远洋水体通常具有更高的水清澈度和更低的营养盐浓度。高浊度降低了太阳辐射的穿透深度,从而影响水体中的热结构(Kara et al., 2005; Loptien & Meier, 2011; Kim et al., 2020)。受河流输入影响的另一个重要方面是,在大型河口中,底部沉积物通常表现出特定地点的组成(Sherwood & Creager, 1990; Nitsche et al., 2007; Wei et al., 2021)。在湾的现场观测表明,沉积物特征存在显著的空间异质性,在支流和湾中部普遍观察到较高的泥含量(Nichols et al., 1991)。沉积物质地的差异可能会影响底摩擦,从而影响局部水动力过程(Feddersen et al., 2003; Prandle, 2003; Wu et al., 2011)。
本研究旨在通过应用基于物理的模型标定策略,改善湾的跨尺度水动力模拟。此前,我们已经证明了水深(由高分辨率DEM提供)所起的关键作用;特别是,我们展示了许多其他模型中普遍采用的水深平滑和处理在改变湾的物理和生物过程方面的有害影响(Ye et al., 2018; Cai et al., 2022)。总的来说,水深是沿海和近岸环境中的一阶强迫,应谨慎对待(Zhang et al., 2024)。正如Zhang et al. (2024)所证明的,真实地再现重要的水深特征确实是可信建模的第一步。除了水深之外,他们还提到需要仔细检查其他强迫因素,最好以现场观测为指导。在本文中,我们通过展示基于物理的模型标定策略,延续了可信建模的主题。采用单个高分辨率非结构网格模型来解析整个区域,而不依赖于网格嵌套。我们将重点关注两个重要的物理强迫因素:(1) 影响热结构的水体浊度,以及 (2) 影响底摩擦从而影响盐水入侵的沉积物组成。我们的结果突出了基于物理的模型标定在改善跨尺度模拟方面的优势,并展示了我们在复杂河口环境中的无缝建模能力。这项工作是作为美国环保署切萨皮克湾项目第七阶段主湾模型开发的一部分进行的(Hood et al., 2021; https://www.chesapeakebay.net),因此将支持未来与湾生态动力学相关的研究和管理工作。
我们将在第2.1节中描述数值模型,在第2.2节中描述本研究中使用的观测数据集。第2.3节介绍基于物理的标定方法,随后在第2.4节简要描述模型评估方法。第3节提供模型验证和敏感性实验,以展示标定方法的优势。第4节讨论注意事项和未来的工作计划。第5节给出简短总结。
2. 数据与方法
2.1. 数值模型
2.1.1. 模型描述
本研究采用半隐式跨尺度水动力综合系统模型(SCHISM;Zhang et al., 2016)。SCHISM是一个基于非结构网格的三维、静水、斜压海洋模型,是原始半隐式欧拉-拉格朗日有限元模型(SELFE;Zhang & Baptista, 2008)的先进衍生产品。采用半隐式时间步进方案使得SCHISM不受Courant-Friedrichs-Lewy (CFL) 稳定性约束(Courant et al., 1967),即使在非常精细的空间分辨率下也能确保高数值效率。在水平方向上,SCHISM支持由三角形和四边形单元组成的灵活网格配置,能够同时准确表示复杂的岸线几何形状和河道。在垂直方向上,SCHISM提供了一个高度灵活的坐标系,称为带剃削单元的局部σ坐标(LSC),这已被证明可以减少海洋建模中的压力梯度误差,同时忠实捕捉原始水深(Zhang et al., 2015)。SCHISM不进行水深平滑或处理,这对于沿海和近岸建模至关重要(Zhang et al., 2024)。SCHISM已广泛应用于从近岸带到大洋的各种尺度(Ye et al., 2018; Amores et al., 2022; Zhang et al., 2023),在水动力模拟中表现出高可靠性和鲁棒性。
2.1.2. 模型配置
为了解析研究区域内复杂的岸线几何形状,我们构建了一个覆盖切萨皮克湾及其沿海海洋的高分辨率混合三角形/四边形网格,包括51,215个节点和72,877个单元(图1)。使用总共18,662个四边形单元来更好地解析主湾和支流内的深水河道。水平分辨率(定义为单元的外接圆半径)范围为0.2公里至3.4公里,在湾内保持高分辨率(<1.5公里)。采用LSC²垂直网格,垂直层数范围为11至52层。动量平流使用欧拉-拉格朗日方法,轨迹追踪采用二阶Runge-Kutta方法(Zhang & Baptista, 2008),而示踪物输运方法采用三阶加权本质非振荡(WENO)格式(Ye et al., 2019)。湍流闭合方程使用Umlauf and Burchard (2003)的通用长度尺度(GLS)模型。
模型水深从多个高分辨率水深数据集(如BlueTopo和CoNED)插值得到,并基于海图进行了交叉验证(Danielson et al., 2016; Rice et al., 2023)。本研究中使用的垂直基准是平均海平面(MSL)。从第七阶段流域模型(原始第六阶段流域模型的升级版;Bhatt et al., 2023)获得的每小时流量数据被分配到湾内的海岸线上,以充分考虑来自非点源和点源的淡水输入。此外,我们将几个主要支流(如萨斯奎哈纳河、波托马克河和拉帕汉诺克河)源头的流量数据替换为来自USGS gauges的观测流量,以最小化潜在的输入误差。所有河流都作为盐度为0 PSU的源输入纳入模型。
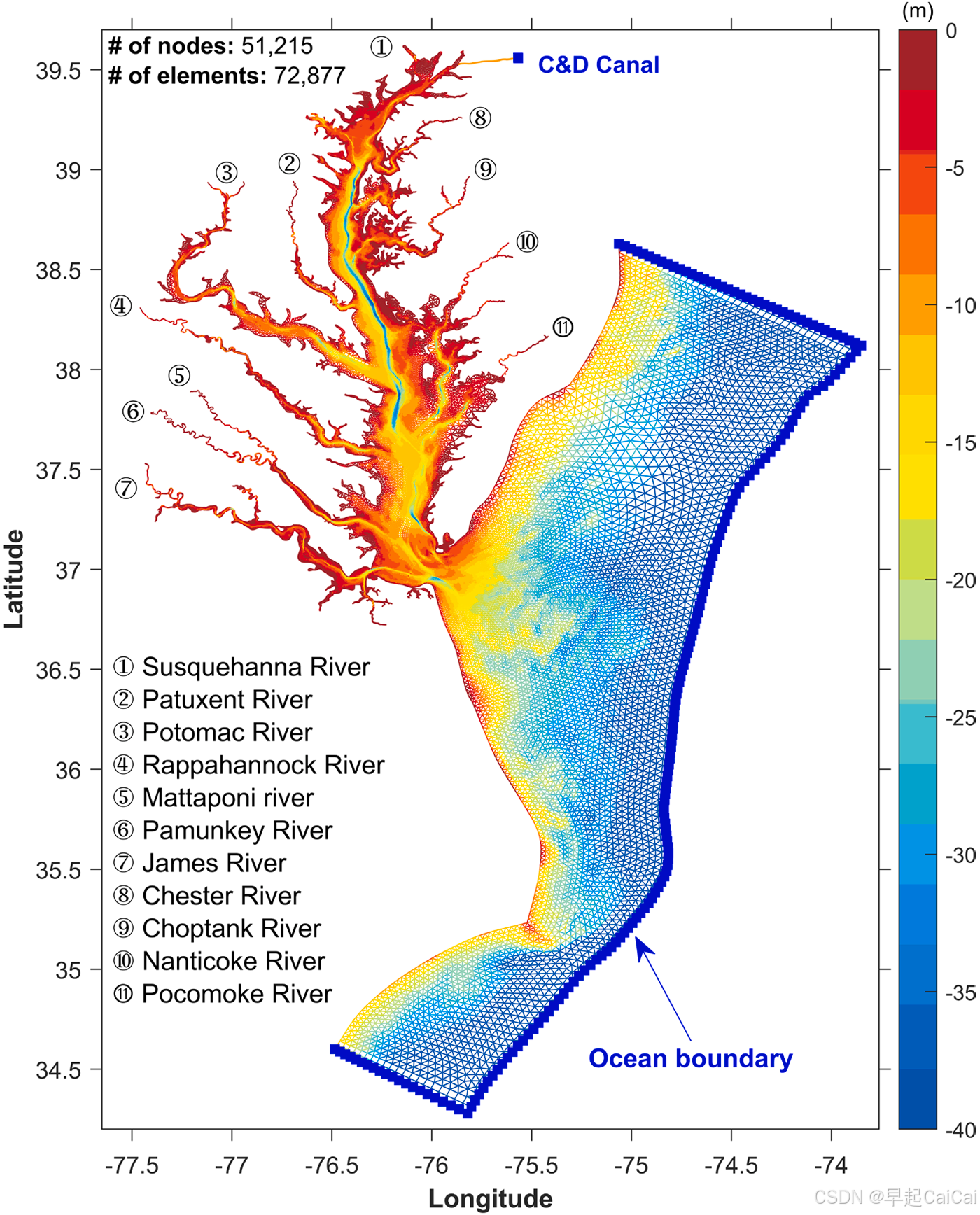
图1 模型域和水深。蓝点表示开边界节点,北部对应C&D运河,南部代表大陆架附近的海洋边界。圆圈数字标记了湾内主要支流的位置,如图例所列。
大气强迫来自欧洲中期天气预报中心(ECMWF)提供的第五代再分析数据集(ERA5;Hersbach et al., 2020),空间分辨率为0.25°,时间分辨率为每小时。初始条件(包括温度、盐度和海面高程)来自先前的长期模拟。模型域中定义了两个开边界。第一个代表海洋边界,位于大陆架断裂带附近。第二个位于切萨皮克和特拉华(C&D)运河,以考虑切萨皮克湾和特拉华湾之间的水交换。在运河边界处,温度和盐度输入从最近的CBP监测站(ET2.1)插值得到。海面高程(包括潮汐信号)从美国国家海洋和大气管理局(NOAA)业务化海洋产品与服务中心(CO-OPS)提供的上游水位站(里迪角,特拉华州)获得。观测水位数据中的缺口使用调和分析填补。在海洋边界处,温度、盐度、亚潮速度和亚潮海面高程来自Copernicus海洋环境监测服务(CMEMS)生产的GLORYS再分析数据集。沿海洋边界还应用了一个14公里宽的温盐松弛区,基于恢复方程每天向随时间变化的GLORYS再分析场松弛。从AVISO提供的FES2014潮汐产品中提取的八个主要潮汐分潮(M₂、S₂、N₂、K₂、K₁、P₁、O₁、Q₁)被施加在海洋边界上。
2.1.3. 实验设计
进行了一系列数值实验以增强湾的跨尺度水动力模拟(表1)。这些实验也旨在分离有助于模型改进的关键物理因素。模拟时段覆盖1993年1月1日至2005年1月1日。第一年被指定为旋转上升阶段,其余十年用于分析。标定过程从基线模拟(RUN01a)开始,该模拟假设中等水体浊度(水体类型=4)和恒定的底部拖曳系数(C_d = 0.0025)。这个C_d值在以前的模拟研究中常用(Munk, 1997; Jayne & Laurent, 2001)。
表1
不同水体类型和底部拖曳系数的敏感性实验。
| 实验 | 水体类型 | 底部拖曳系数 |
|---|---|---|
| RUN01a (基础运行) | 类型4 (中等浊度) | C_d = 0.0025 |
| RUN01b | 类型4 (中等浊度) | 波托马克河C_d = 0.0005,其余地区0.0025 |
| RUN02a | 类型7 (高浊度) | C_d = 0.0025 |
| RUN02b | 类型4 | Chezy-Manning (n = 0.02) |
| RUN03a | Kd490依赖型 | C_d = 0.0025 |
| RUN03b | 类型4 | Chezy-Manning (n 依赖于沉积物类型) |
| RUN04a (标定运行) | Kd490依赖型 | Chezy-Manning (n 依赖于沉积物类型) |
基线运行旨在揭示模拟河口-陆架-海洋连续体中跨尺度水动力学的系统挑战。RUN01b是基于RUN01a的另一个实验,用于证明底摩擦在改善支流(波托马克河)潮汐动力学和盐水入侵中的关键作用。第二组实验(RUN02a和RUN02b)应用了标定方法,但未考虑水文特征(水体浊度和沉积物类型)的空间异质性。第三组实验(RUN03a和RUN03b)使用了受观测约束的空间变化参数,而最终实验(RUN04a)结合了RUN03a和RUN03b,以产生具有最佳性能的完全标定模拟。通过这种标定流程,我们展示了一种可信的、基于物理的方法,用于涉及跨尺度过程的复杂、真实案例,前提是模型已仔细处理了水深(Zhang et al., 2024)。
2.2. 观测数据集
2.2.1. 卫星衍生的Kd490数据
为了推断模型中使用的水体类型,我们利用了多年平均的卫星衍生的490nm漫衰减系数(Kd490)数据。Kd490是水体浊度或清澈度的关键指标。这些数据直接从NOAA CoastWatch提供的可见光红外成像辐射计套件(VIIRS)海洋水色产品获得,时间为2012年至2022年,空间分辨率为750米。本研究未进行额外的偏差校正。请注意,未考虑其他低分辨率卫星产品,因为它们通常缺乏对湾支流上游的覆盖,无法解析这些区域水体清澈度的精细尺度空间特征。尽管VIIRS卫星数据与模拟时段存在时间差异,但它们可以可靠地捕捉水体清澈度的空间格局,这在研究区域内多年来高度一致(Son & Wang, 2012; Turner et al., 2025)。
2.2.2. 综合沉积物数据集
为了计算依赖于沉积物的底部拖曳系数,我们通过整合覆盖整个湾的两个高分辨率现场观测产品,对沉积物组成进行了客观分析。第一个产品由弗吉尼亚海洋科学研究所(VIMS;Anderson et al., 1993)编制,第二个产品来自usSEABED(Buczkowski et al., 2020),这是美国地质调查局及其合作伙伴领导的一项合作成果。
在插值之前,由于两个产品可能使用相同的数据源,因此删除了坐标重叠的重复条目。使用数据插值变分分析(DIVA)方法(Barth et al., 2014)将剩余的散点数据点插值到正交网格上,由于该方法能够考虑海陆边界,因此特别适合沿海环境中的地理空间插值。投影后的网格在经度和纬度方向上的水平分辨率为0.003°,因此能够解析湾中的一些小支流/小溪。这个综合数据集包括三种沉积物类型(泥、沙和砾石)的空间分布,覆盖整个切萨皮克湾及其沿海海洋。它为估计模型中的底部拖曳系数提供了良好的数据源。
2.2.3. 验证数据集
为了全面评估模型在河口-陆架-海洋连续体上的性能,我们收集了来自CBP维护的121个站点的现场温度和盐度观测数据,这些站点覆盖了主湾及其支流。自1984年以来,CBP一直在全湾进行船基调查,在多个深度测量温度、盐度和各种生物地球化学变量,大约每月1-2次。为了评估模型性能,提取了模拟时段的观测数据,并与模型结果进行了比较。此外,我们还获得了来自NOAA CO-OPS潮汐计站点的水位观测数据。其中,位于波托马克河源头的华盛顿站专门用于检查底摩擦对支流潮汐传播的影响。还应用了VIMS制作的基于观测的切萨皮克湾平均潮差图集。
2.3. 基于物理的标定
2.3.1. Jerlov水体类型
水体清澈度是控制短波辐射衰减的关键光学特性,进一步影响水体中的热结构。Jerlov (1976) 引入了一个广泛采用的分类系统,根据水体清澈度对水体进行分类。在SCHISM中,短波辐射的衰减使用Jerlov的双分量(红光和蓝光)指数衰减模型计算。
Qdown(z)=Qsw[exp(−zd1)+(1−r)exp(−zd2)](1)Q_{\mathrm{down}}(z) = Q_{\mathrm{sw}}\left[\mathrm{exp}\left(-\frac{z}{d_1}\right) + (1 - r)\mathrm{exp}\left(-\frac{z}{d_2}\right)\right] \quad (1)Qdown(z)=Qsw[exp(−d1z)+(1−r)exp(−d2z)](1)
其中 QswQ_{\mathrm{sw}}Qsw 是海面的短波辐射。rrr 是红光比例。d1d_1d1 表示红光的穿透深度尺度,d2d_2d2 是蓝光的穿透深度尺度。这三个参数的不同组合导致水体中短波辐射的不同衰减。为了完全解析湾中显著的浊度梯度,本研究将九种Jerlov水体类型(Jerlov, 1976)纳入模型,包括五种大洋类型(I, IA, IB, II, III)和四种沿岸类型(1C, 3C, 5C, 7C)。如图2所示,短波辐射在清澈水中可以穿透更深,可能加热浅水区域的海底,而在浑浊水中,则大部分被上层吸收。
为了在模型中的不同区域分配水体类型,我们使用来自VIIRS海洋水色产品的多年平均Kd490数据作为代理。图3显示了Kd490以及模型中最终使用的水体类型的空间分布。由于文献中没有建立Kd490和Jerlov水体类型之间的经验关系,我们的分类方法主要旨在捕捉不同水体类型之间的相对衰减率(图3b)。VIIRS产品显示整个湾的水体浊度存在强烈的空间梯度(图3a),高浊度通常出现在主湾和支流的头部。这种空间格局直接反映了河流输入的显著影响。
2.3.2. 底部拖曳系数
底摩擦是影响水动力学的关键因素,特别是在湍流底边界层内。在SCHISM中,底部应力(τb\tau_{\mathrm{b}}τb,单位为 Nm−2\mathrm{Nm}^{-2}Nm−2)使用二次定律计算如下:
τb=ρCd∣ub∣ub(2)\tau_{\mathrm{b}} = \rho C_{\mathrm{d}}|u_{\mathrm{b}}|u_{\mathrm{b}} \quad (2)τb=ρCd∣ub∣ub(2)
其中 ρ\rhoρ 是水密度(kgm−3\mathrm{kgm}^{-3}kgm−3),ubu_{\mathrm{b}}ub 是底层的速度矢量(m s−1\mathrm{m~s}^{-1}m s−1)。CdC_{\mathrm{d}}Cd 是无量纲底部拖曳系数,
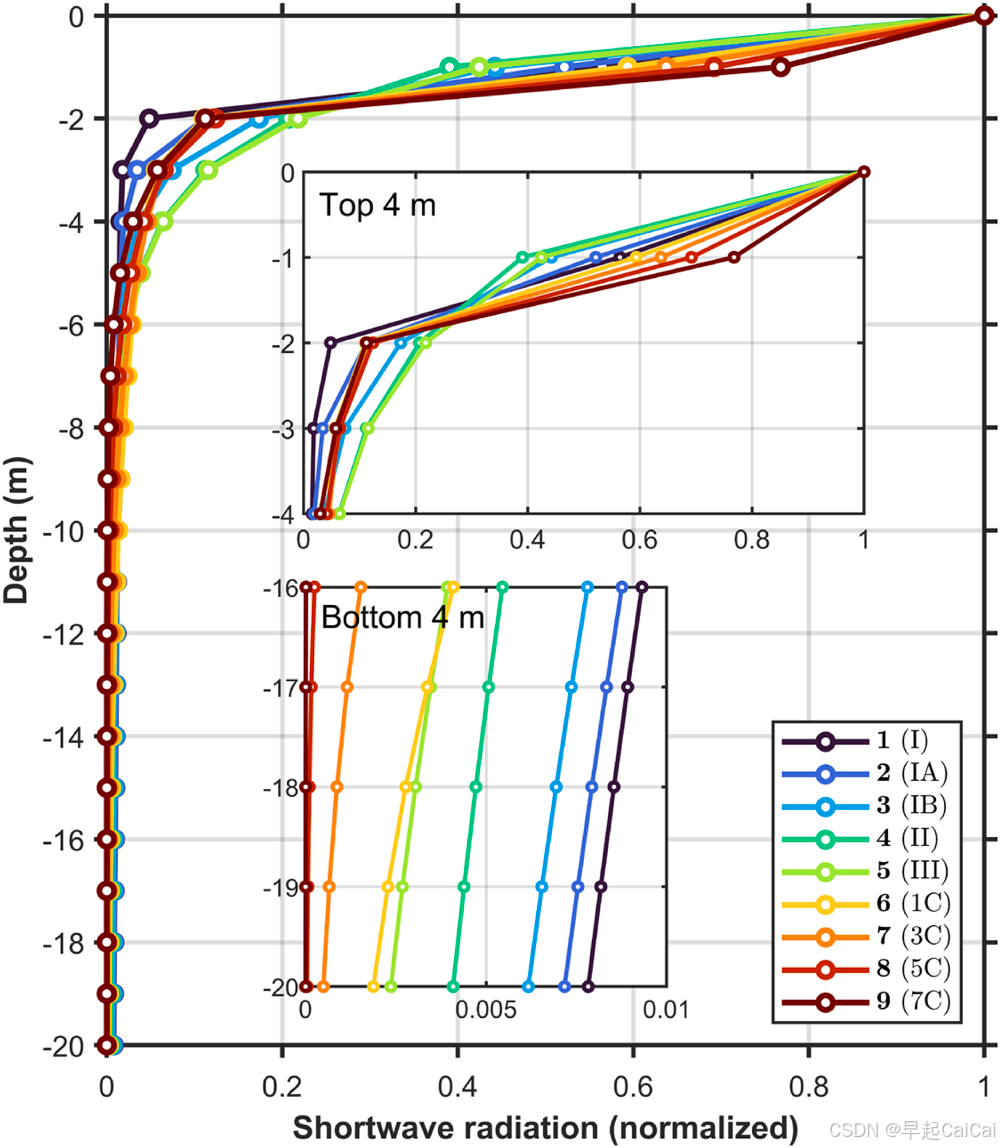
[图2] 不同Jerlov水体类型(I, IA, IB, II, III, 1C, 3C, 5C, 7C)水体中短波辐射(以表面入射值为基准归一化)的下行穿透。
通常作为实际应用中底摩擦的关键调谐参数。该拖曳系数受多种因素影响,如水深、沉积物质地、潮汐幅度等。先前研究中使用的 CdC_dCd 典型值为0.0025(Munk, 1997; Jayne & Laurent, 2001)。本研究应用经典的Chezy-Manning公式(Spitz & Klinck, 1998)来估计 CdC_dCd,如下所示:
Cd=n2gmax(h,5)c(3)C_d = \frac{n^2g}{\max (h,5)^c} \quad (3)Cd=max(h,5)cn2g(3)
其中 hhh 是水深(m),ggg 是重力加速度(9.81 m s−2\mathrm{s}^{-2}s−2),c=1/3c = 1 / 3c=1/3,nnn 代表曼宁系数。为了避免在浅水中出现过大的 CdC_dCd,应用了5米的最小水深。虽然常数曼宁系数0.02在先前研究中通常用作典型值(Spitz & Klinck, 1998),但这种简化忽略了沉积物组成的空间异质性。为了考虑沉积物效应,我们引入了一种加权平均方法,基于局部沉积物分布来估计曼宁系数,如下所述:
n=0.01×Rmud+0.02×Rsand+0.03×Rgravel(4)n = 0.01\times R_{mud} + 0.02\times R_{sand} + 0.03\times R_{gravel} \quad (4)n=0.01×Rmud+0.02×Rsand+0.03×Rgravel(4)
其中 RRR 值表示不同沉积物类型的分数组成,范围从0到1,它们从第2.2.2节的沉积物观测中获得。每个网格点上三种组分的 RRR 值之和等于1。为每种沉积物类型分配了预定义的曼宁系数,较细的沉积物对应较低的值。在本研究中,参考先前的经验值(Barnes, 1967; Arcement & Schneider, 1989; Coon, 1998),将泥、沙和砾石的曼宁系数分别设置为0.01、0.02和0.03。因此,在RUN02b中,采用 n=0.02n = 0.02n=0.02 实质上假设了整个模型域内是纯沙质海底(表1)。
图4展示了模型域中泥分数的空间分布,以及使用常数 n=0.02n = 0.02n=0.02 和依赖于沉积物类型的 nnn 导出的两组Chezy-Manning底部拖曳系数。沉积物组成呈现出显著的空间异质性。在沿海海洋中,海底主要由粗粒沉积物组成,泥含量通常低于20%,在
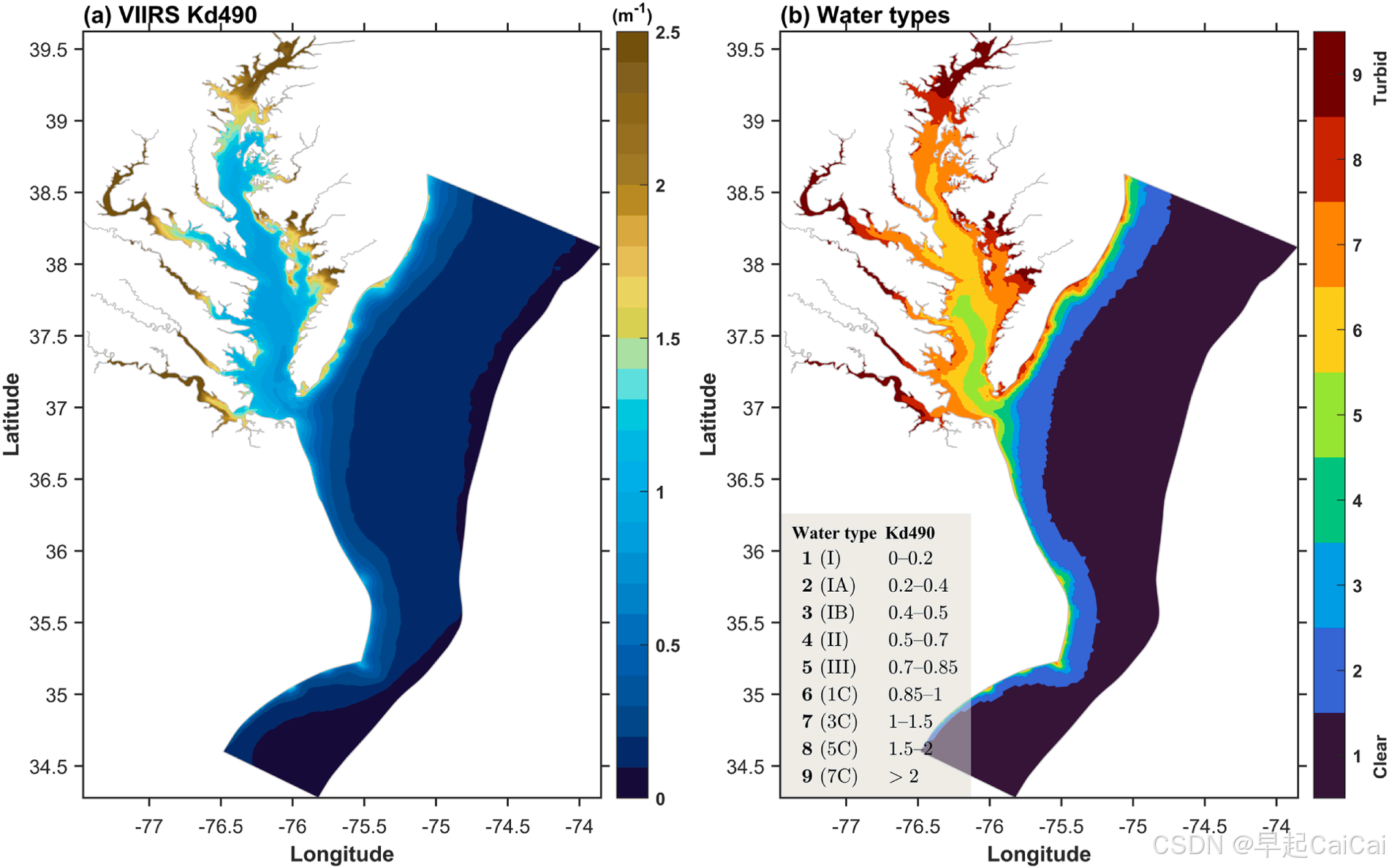
[图3] (a) 来自VIIRS海洋水色产品的多年平均卫星衍生Kd490。(b) 模型中使用的相应水体类型,插图中的表格显示了用于水体类型分类的Kd490阈值范围。
主干的浅水区也观察到类似情况。相比之下,细粒沉积物主导着上湾的深水河道和支流,那里的泥含量超过70%。这种沉积物格局反映在考虑沉积物效应的拖曳系数上(图4d),在细粒沉积物主导的区域明显较低。然而,具有常数 nnn 的拖曳系数在湾内产生高得多的值,尤其是在支流中,这主要是由于那里的水深较浅(图4c)。
2.4. 误差指标
为了评估模型性能,本研究采用了两个广泛使用的统计指标,包括均方根误差(RMSE)和平均误差(ME)。ME表示误差的偏差或方向,而RMSE量化总绝对误差的大小。公式如下:
ME=1N∑i=1N(Pi−Oi)(5)ME = \frac{1}{N} \sum_{i=1}^{N} (P_i - O_i) \quad (5)ME=N1∑i=1N(Pi−Oi)(5)
RMSE=1N∑i=1N(Pi−Oi)2(6)RMSE = \sqrt{\frac{1}{N} \sum_{i=1}^{N} (P_i - O_i)^2} \quad (6)RMSE=N1∑i=1N(Pi−Oi)2(6)
其中 PiP_iPi 和 OiO_iOi 分别表示模型预测值和观测值,NNN 是数据点的总数。
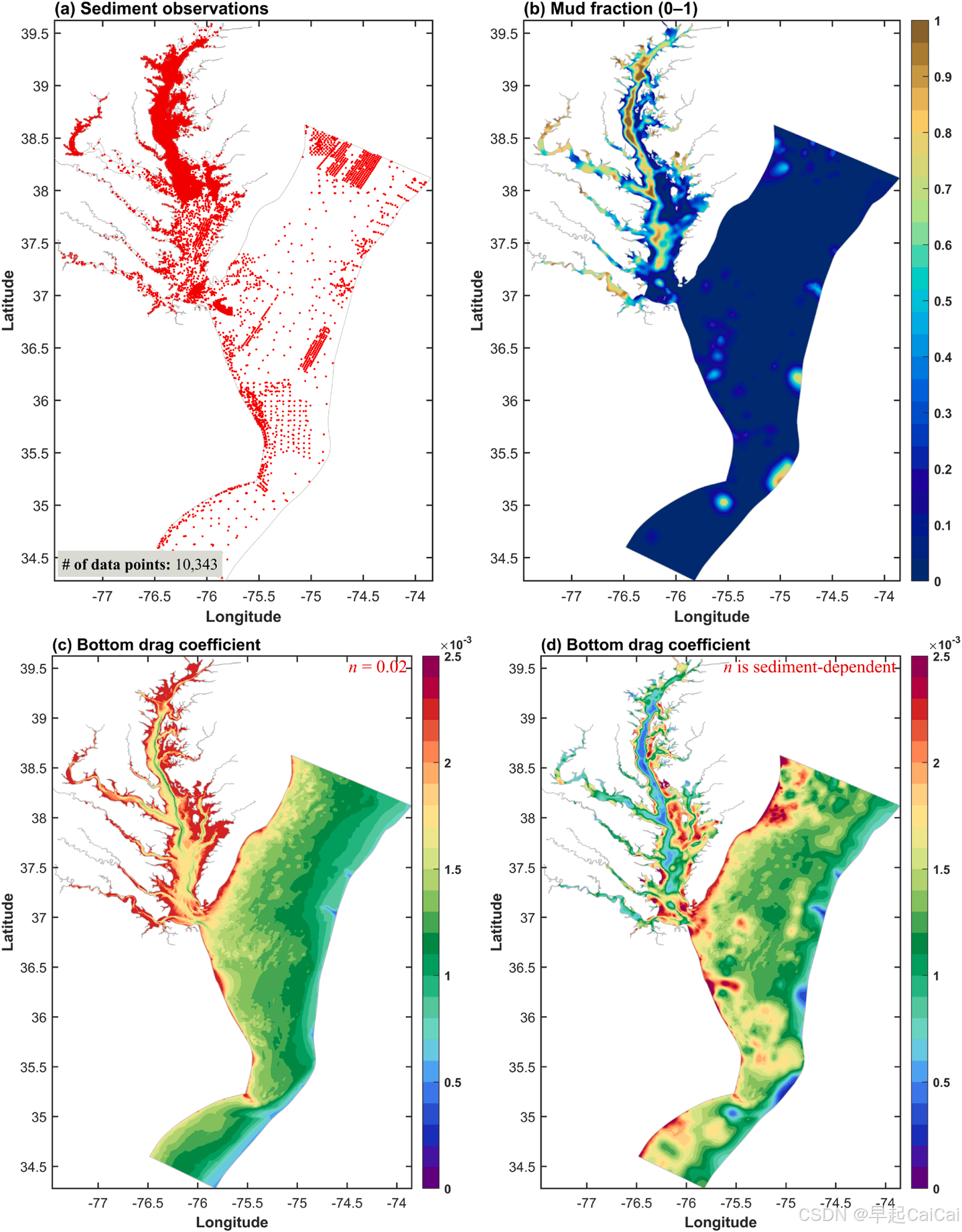
[图4] (a) 客观分析数据集中使用的10,343个沉积物观测点的位置。(b) 来自客观分析数据集的泥分数空间分布(0-1)。© 使用 n=0.02n = 0.02n=0.02 的Chezy-Manning公式计算的底部拖曳系数。(d) 使用依赖于沉积物类型的 nnn 的Chezy-Manning公式计算的底部拖曳系数。
3. 结果
3.1. 跨尺度模拟中的挑战
基线模拟的一个显著特征是在表层和底层普遍低估了温度和盐度(图5),模拟误差具有显著的空间和垂直变异性。在所有支流中,温度的系统性低估都很明显,尤其是在表层(ME = -1.126°C),其模式与主河道明显不同。这种模式表明,某些特定于支流的物理过程没有得到充分体现。相比之下,盐度的低估在底层更为明显(ME = -1.036 PSU),特别是在通常发生强烈淡水-咸水相互作用的上湾及其西部支流。值得注意的是,模拟在下湾表现相当好,但盐水入侵在上湾和支流中明显受到抑制,导致这些地区盐度严重低估。总的来说,温度和盐度最显著的模拟误差都发生在支流中,凸显了在这种复杂的河口系统中捕捉跨尺度水动力过程的挑战。尽管与先前的研究相比取得了良好的水动力性能(参见表2),基线模拟在再现跨尺度动力学方面仍然表现出不可忽视的缺陷,表明需要进一步标定和模型改进。
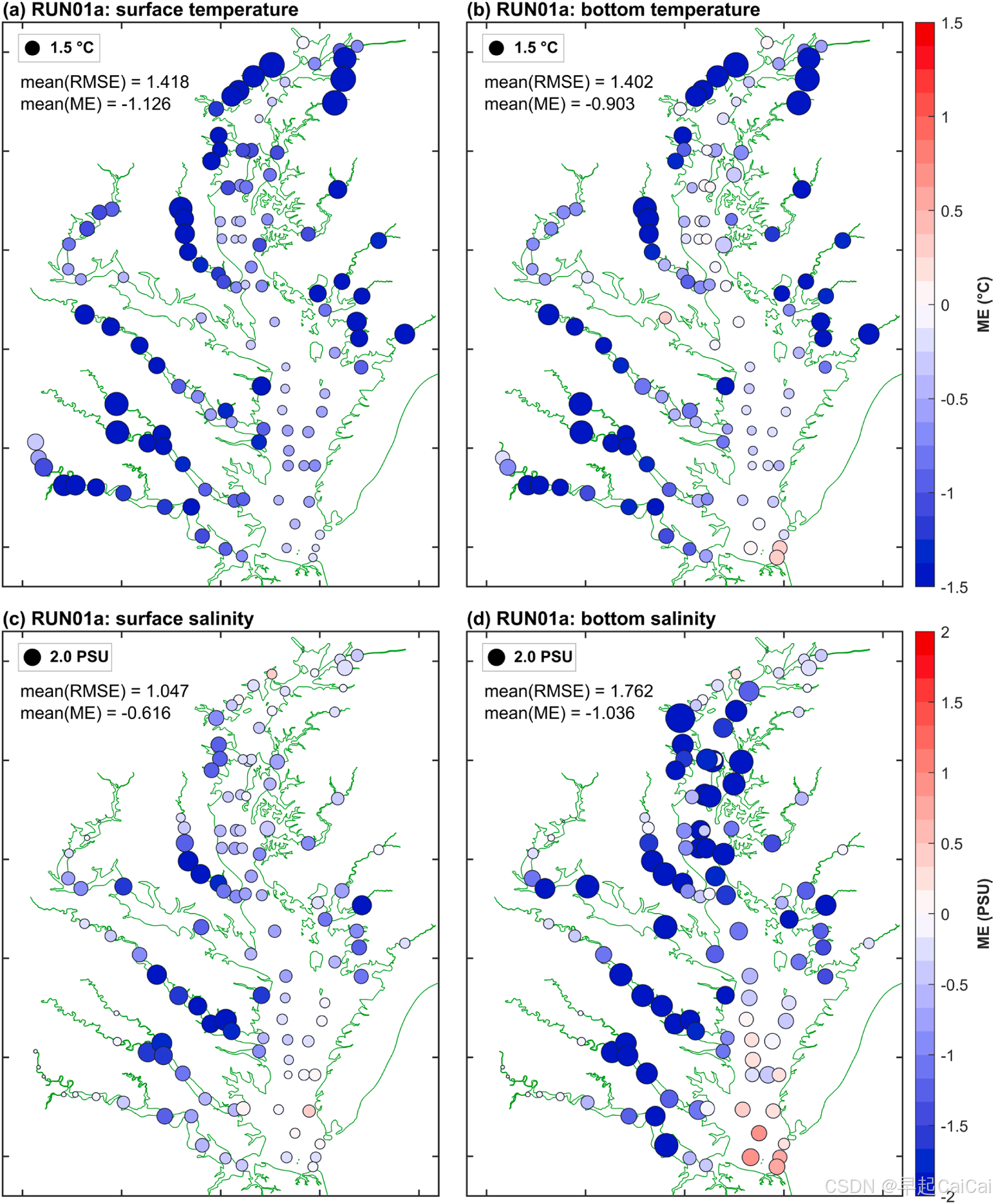
[图5] (a, b) 基线模拟(RUN01a)在121个CBP监测站的表层和底层温度(°C)的ME和RMSE的空间分布,以及 (c, d) 表层和底层盐度(PSU)的ME和RMSE的空间分布。圆圈颜色表示ME,圆圈大小表示RMSE。每个面板的左上角标注了所有站点的平均统计值。
3.2. 水体浊度对热结构的影响
为了解决基线模拟中系统性的温度低估问题,RUN02a和RUN03a应用了两种不同的方法。RUN02a在整个域中使用相对较大的水体类型7,而RUN03a应用了基于卫星衍生的Kd490数据的空间变化水体类型。图6给出了RUN02a和RUN03a温度模拟误差的空间分布。需要注意的是,两个实验的盐度统计结果与RUN01a相似,为简洁起见,此处未显示。显然,使用较大的水体类型有效地缓解了温度低估问题,如RUN02a和RUN03a所示。这种改进在表层尤其显著,因为高浊度水体在上层吸收了更多热量。然而,Kd490依赖型水体类型的优势是明显的,它成功地纠正了支流河口的温度低估,而基线和RUN02a未能做到这一点。
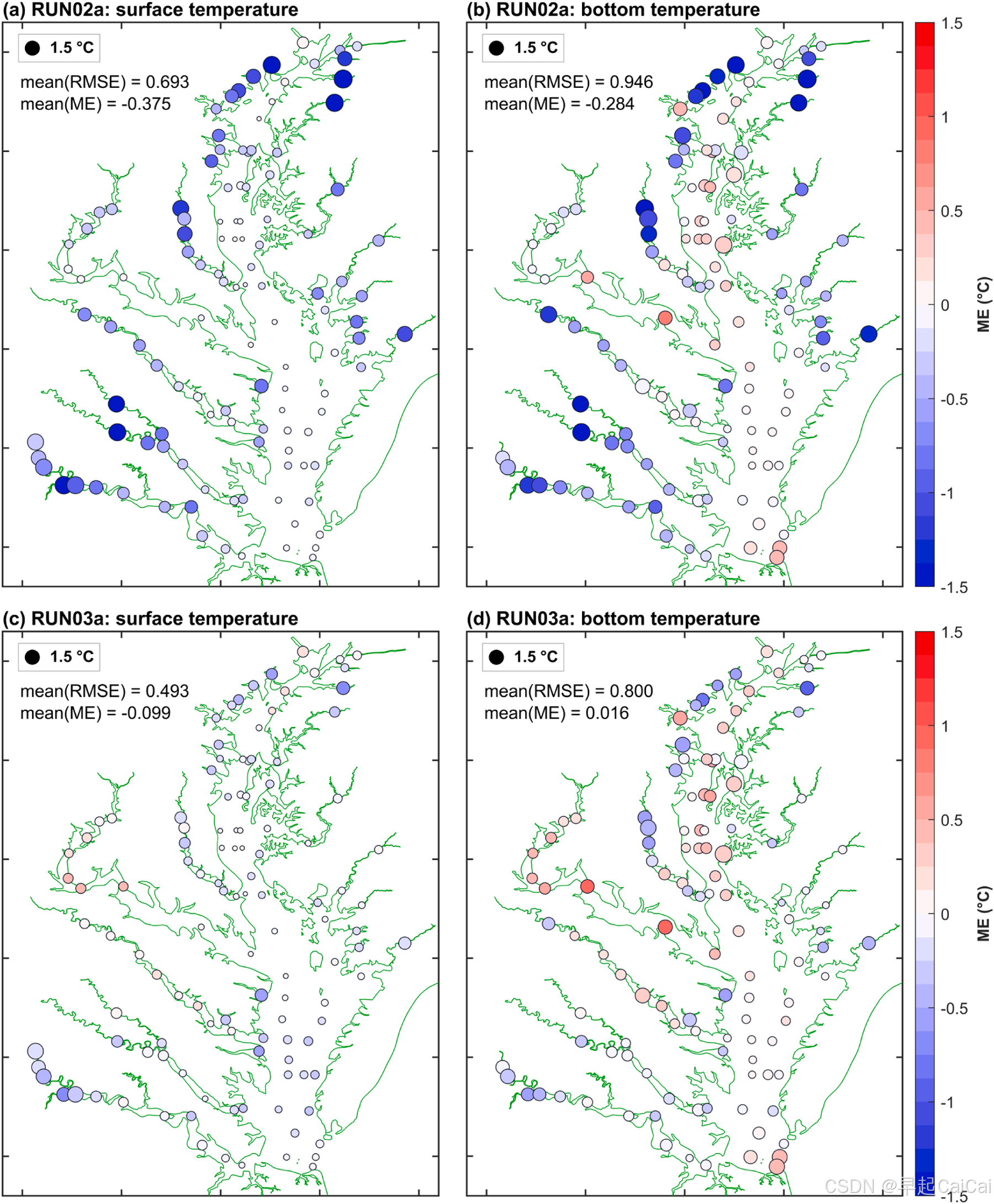
[图6] (a, b) RUN02a在121个CBP监测站的表层和底层温度(°C)的ME和RMSE的空间分布。(c, d) RUN03a的统计结果。圆圈颜色表示ME,圆圈大小表示RMSE。每个面板的左上角标注了所有站点的平均统计值。
[图7] 显示了支流(帕塔克森特河)中的温度改进情况,(帕塔克森特河)是所有支流的典型代表。可以看出,基线模拟中的温度低估在支流中表现出显著的纵向趋势,与观测到的浊度基本一致。通常,较高的温度误差发生在高浊度水域。在RUN02a中,使用较大的水体类型7仍然不足以解决具有极高浊度水的支流上游的温度低估问题。相比之下,RUN03a通过应用Kd490依赖型水体类型纠正了这个问题,这合理地反映了支流中的真实水文条件。与RUN02a相比,RUN03a进一步改善了支流河口的温度。这一结果证明了在跨尺度案例的温度模拟中使用空间变化水体类型的优势。
3.3. 沉积物类型对盐水入侵的影响
通过敏感性模拟RUN02b和RUN03b检验了沉积物类型在盐度模拟中的作用。在计算底部拖曳系数时,RUN02b假设整个域内为沙质海底,n=0.02n = 0.02n=0.02,而RUN03b使用基于观测沉积物类型的空间变化 nnn。图8显示了RUN02b和RUN03b中模拟盐度的误差。两个实验中温度的误差非常相似,此处未给出。如图8所示,依赖于沉积物类型的 nnn 的优势是明显的。RUN03b提供了更好的盐度模拟,特别是在底层,这在RMSE中很明显。RUN01a中上湾和支流中受抑制的盐水入侵在RUN03b中得到显著改善,因此盐度改进在底层更为明显。相比之下,RUN02b中盐水入侵仍然较弱,尤其是在支流中。图9以波托马克河为例说明了这个问题。
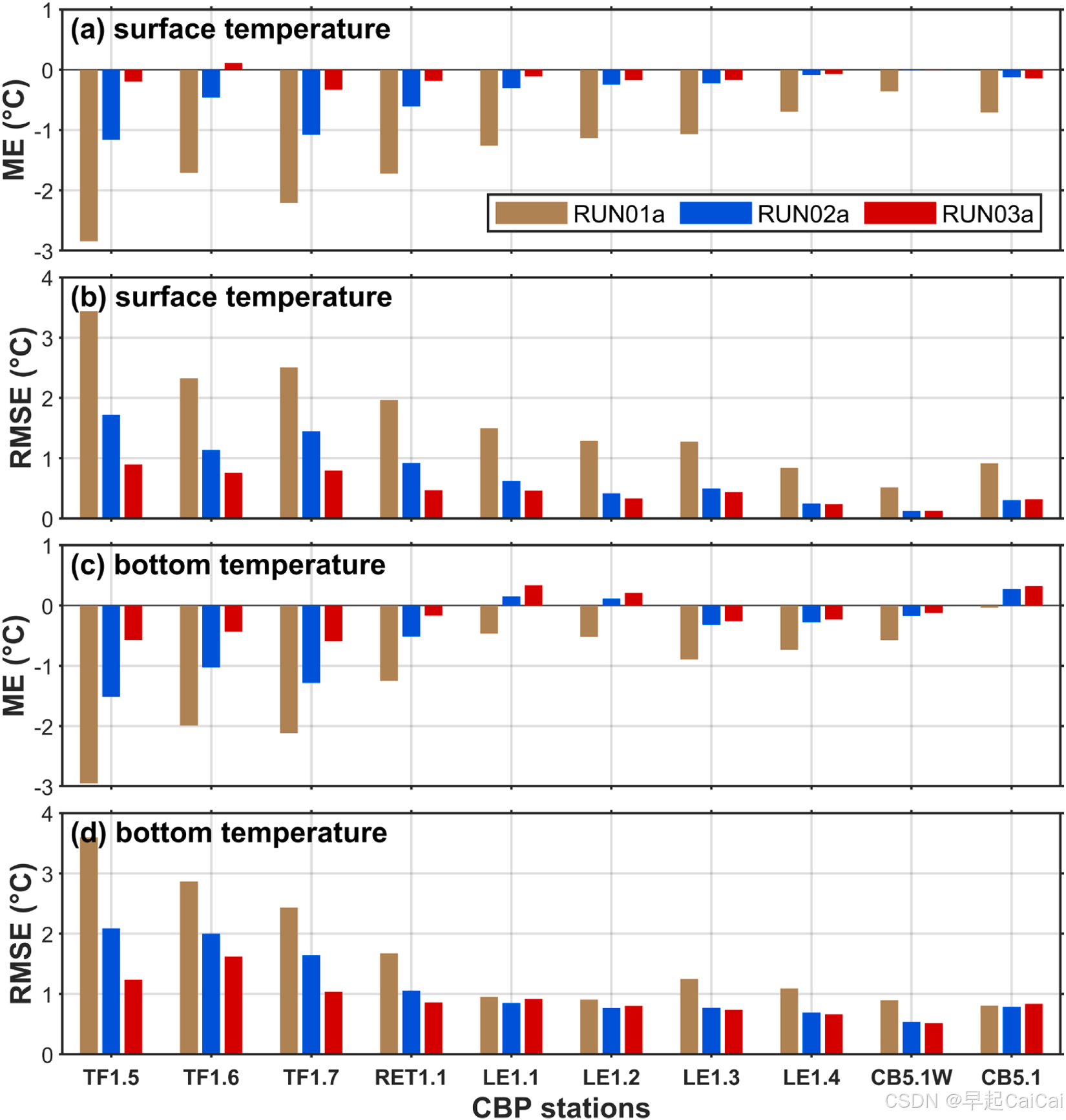
[图7] 帕塔克森特河中 (a, b) 表层温度和 (c, d) 底层温度的模拟ME和RMSE,来自RUN01a、RUN02a和RUN03a。CBP站点按从上游到下游排列。
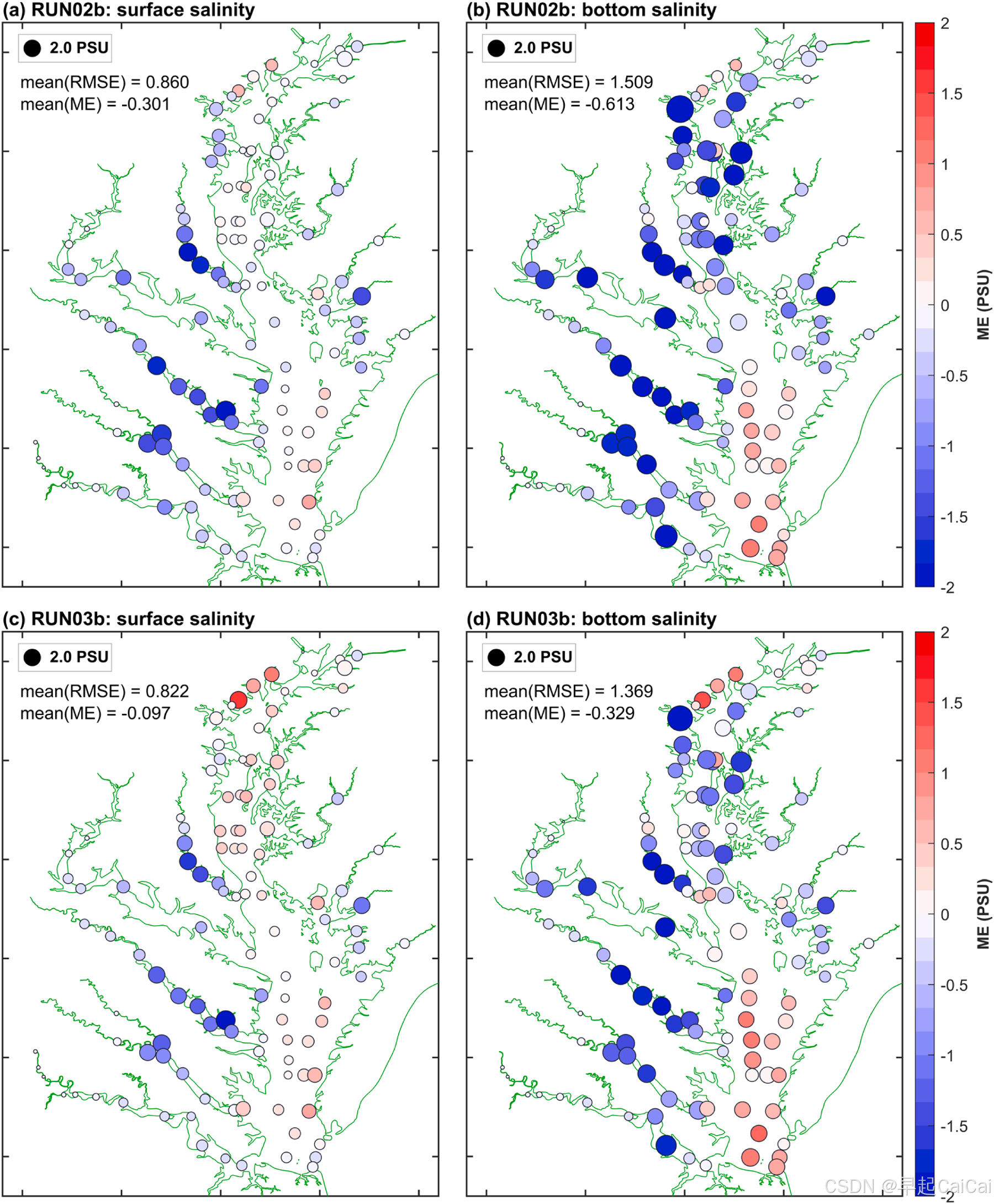
[图8] 与图6相同,但是针对RUN02b和RUN03b的盐度模拟。
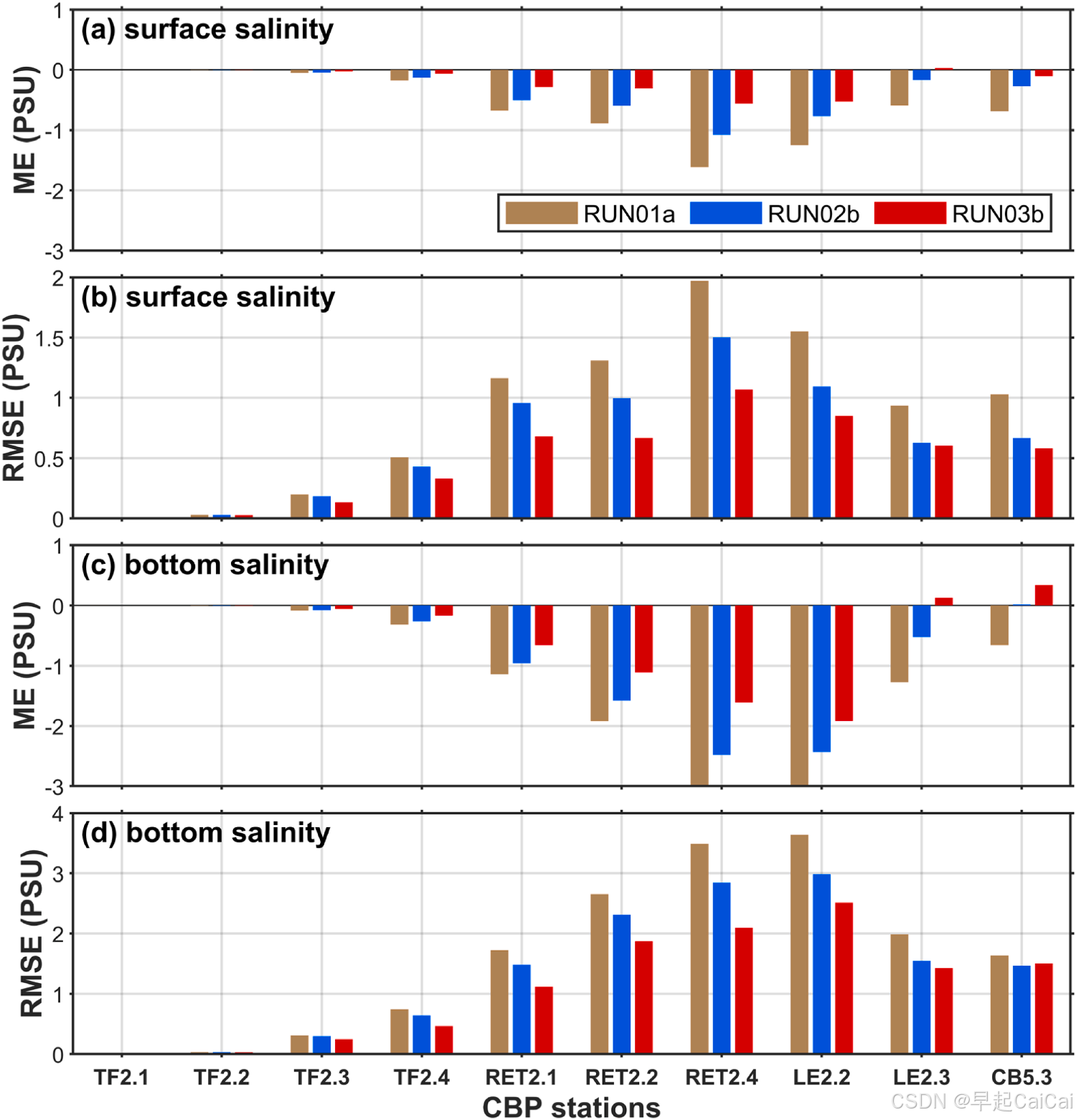
[图9] 波托马克河中 (a, b) 表层盐度和 (c, d) 底层盐度的模拟ME和RMSE,来自RUN01a、RUN02b和RUN03b。CBP站点按从上游到下游排列。
观测到的潮汐放大现象在RUN01a和RUN02b中都未能很好地再现,表现为河口的潮差相对于观测值较小。华盛顿站的时间序列比较进一步证实了这一偏差。如图10e所示,RUN01a和RUN02b中模拟的潮位相似,两者都显著低估了潮差。相比之下,RUN03b明显改善了河口处的潮位模拟,并在再现向上游的潮汐放大方面表现相当好。这种改进与RUN03b中使用的较小底摩擦直接相关。较大的潮差通常意味着河流纵向上更大的潮汐行程,这反过来又增强了向陆的盐水入侵(Geyer & Signell, 1992; Tian et al., 2019)。在RUN03b中,由于泥层的存在,支流中的底部拖曳系数较小,这促进了中湾和支流中的潮汐传播和盐水入侵。Warder et al. (2022) 也报告了在布里斯托尔海峡(一个典型的漏斗形河口)将沉积学数据纳入底摩擦估计后,模拟潮差的显著改进。这些实验强调了沉积物类型在模拟潮汐传播和河口盐水入侵中的关键作用。
为了进一步证明底摩擦在调节支流潮汐动力学和盐水入侵中的关键作用,我们进行了另一个对照实验RUN01b,该实验基于
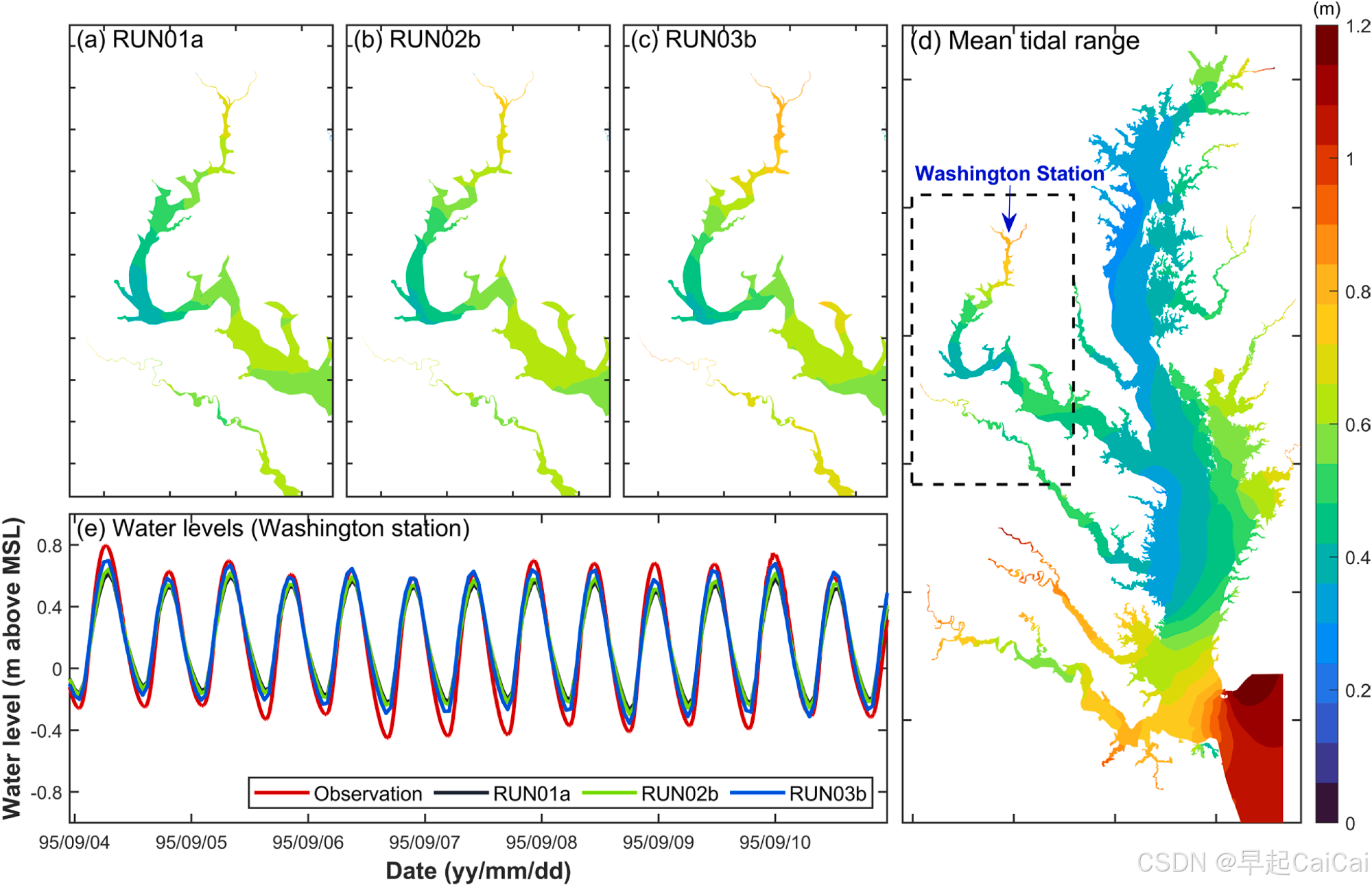
[图10] (a, b, c) 分别来自RUN01a、RUN02b和RUN03b的波托马克河中模拟的潮差。(d) 来自VIMS图集的潮差,黑色虚线框表示波托马克河上游。(e) 位于波托马克河源头的华盛顿站观测和模拟水位的時間序列。
RUN01a。在RUN01b中,波托马克河上游被分配了比RUN01a小得多的 CdC_dCd 值(图11a),以便进行更直接的比较。正如预期的那样,减小的 CdC_dCd 值显著改善了支流河口处的潮汐模拟(图11b)。波托马克河中的盐水入侵在表层和底层也得到增强(图11c和d)。重要的是,河口站点(如LE2.2、LE2.3和CB5.3)的盐度在RUN01a和RUN01b之间几乎保持不变,表明上游的改善不是由来自中湾入侵水盐度变化驱动的。这些结果表明,支流中的潮汐传播和盐水入侵通过底摩擦密切相关。
3.4. 完全标定模拟的性能
前面的部分证明了两种基于物理的标定方法的有效性,温度和盐度模拟的显著改进证明了这一点。本节评估了结合两种方法的完全标定模拟。如预期的那样,集成方法对两个变量都产生了改进(图12)。表层和底层温度的RMSE值分别为0.484°C和0.775°C,而盐度的RMSE值分别为0.809 PSU和1.331 PSU。这些统计结果与先前的标定实验基本相当,误差的空间格局也与它们一致(图12),表明所应用方法的鲁棒性和一致性。
为了更直观地展示本研究在模型性能方面的进展,我们基于先前对湾的模拟研究中报告的误差指标进行了模型间比较(表2)。尽管这些研究的模拟时段各不相同,但所有统计数据都是基于CBP观测得出的。值得注意的是,位于支流中的CBP站点很少被纳入先前的评估中。为了进行定量评估,我们还计算了本研究中在Irby et al. (2018) 用于直接比较的相同23个主流站点的RMSE值。此外,我们使用相同的121个CBP站点集,计算了先前在湾实施的CBP第六阶段主湾模型(Cerco & Noel, 2004)的统计结果。
总的来说,先前研究中报告的RMSE值非常接近,表层温度在1.10-1.76°C之间,表层盐度在1.86-2.50 PSU之间,底层的值更大。相比之下,本研究取得了显著改进,将121个位于主湾和支流的CBP站点的表层平均RMSE降低到约0.48°C和约0.81 PSU。就表层和底层之间的平均RMSE而言,我们的研究通常将温度和盐度误差减少了约60%,相比于先前的模拟研究。更重要的是,这些进步是可信的,因为我们采用的标定策略是基于物理的。
此外,为了与第六阶段主湾模型进行严格比较,我们进行了一个覆盖1989-2001年时段的额外模拟。分析了最后十年的输出,以确保与第六阶段模型的时间覆盖范围一致。由于HYCOM产品在1992年之前不可用,使用SODA再分析作为开边界强迫,并结合边界松弛。在121个CBP站点的验证结果表明,表层/底层温度的RMSE值为0.524/0.844°C,表层/底层盐度的RMSE值为0.930/1.527 PSU。尽管开边界输入发生了变化,该模拟在水动力学方面仍然实现了与第六阶段模型相比的优异性能。这也证明了本研究所应用方法的鲁棒性,并突显了它们在推进切萨皮克湾监管模型未来发展方面的潜力。
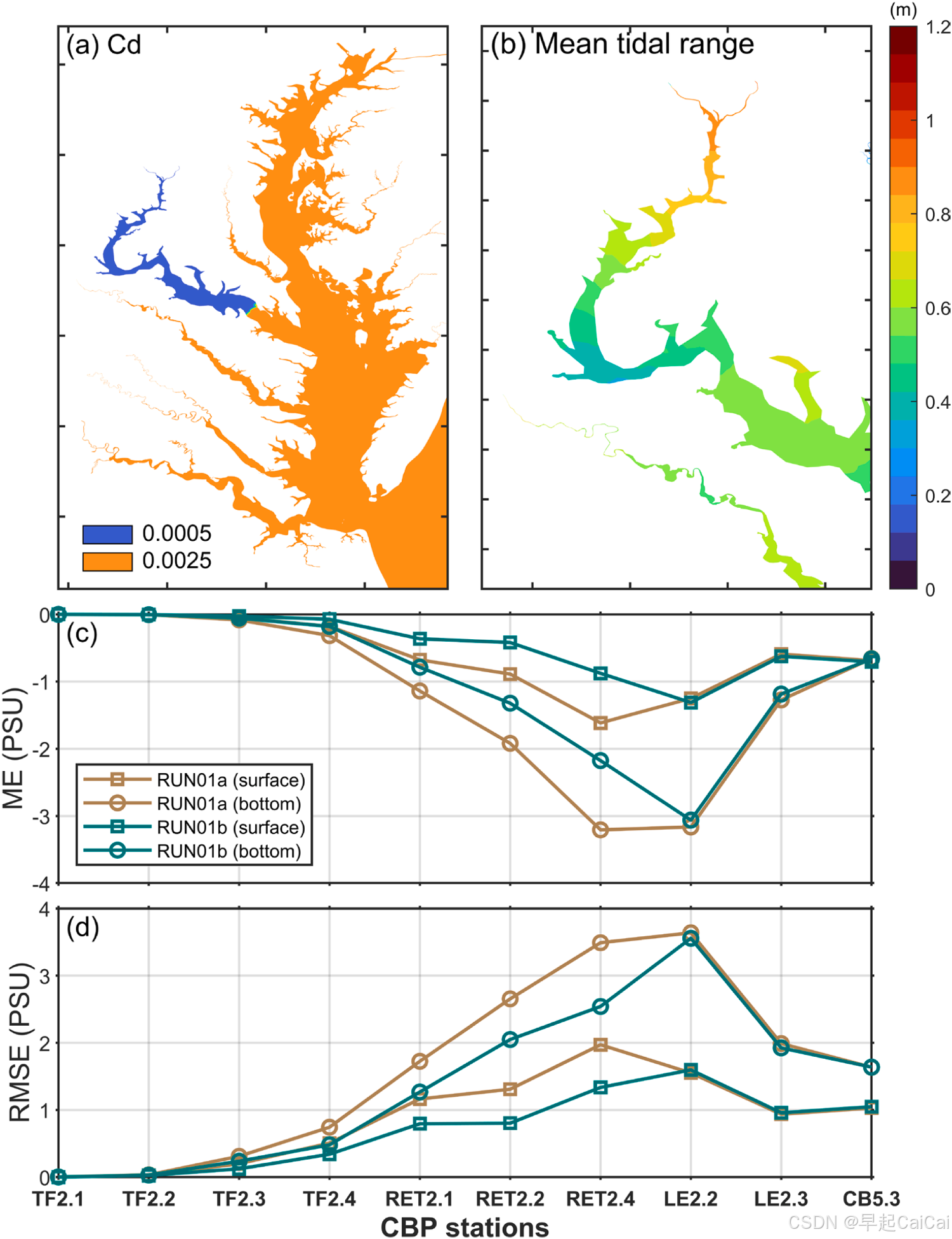
[图11] (a) RUN01b中使用的底部拖曳系数。(b) RUN01b模拟的波托马克河中的潮差。(c, d) 来自RUN01a和RUN01b的沿波托马克河模拟的表层/底层盐度的ME和RMSE。
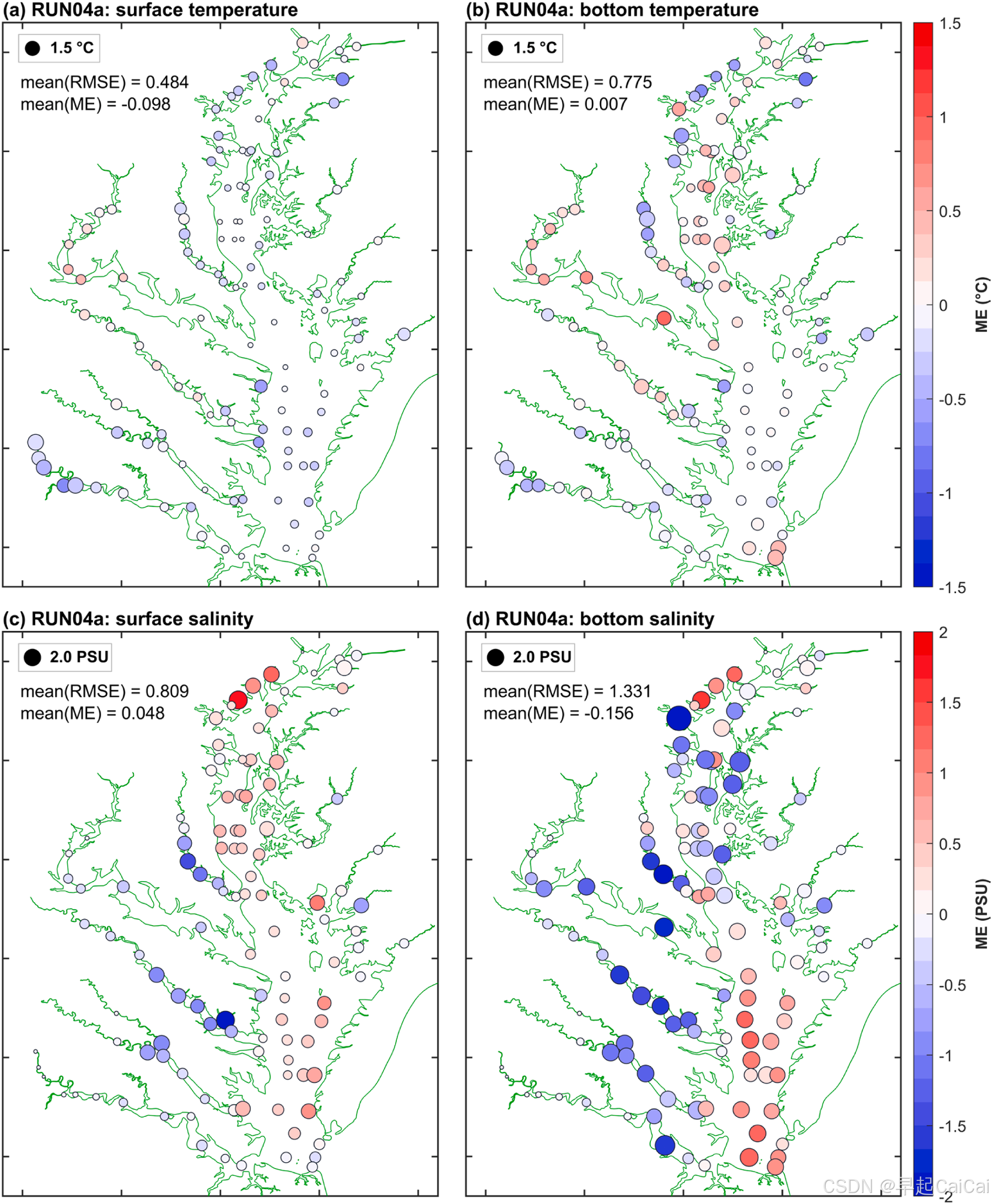
[图12] 与图6相同,但是针对完全标定运行(RUN04a)。
表2
基于CBP观测的不同模拟研究的温度(T)和盐度(S)的RMSE。括号外/内的值分别是表层/底层的RMSE。星号(*)表示计算整个水柱RMSE的研究。
| 参考文献 | RMSE (T, °C) | RMSE (S, PSU) | 模拟时段 | # of CBP站点 |
|---|---|---|---|---|
| Cerco and Noel (2004) | 1.76 (1.94) | 1.90 (2.12) | 1991–2001 | 121 |
| Lanerolle et al. (2009) | 1.10 (1.18) | 2.04 (2.29) | 2003–2005 | 35* |
| Hoffman et al. (2012) | 1.40 | 2.50 | 2003 | 4* |
| Xu et al. (2012) | 1.28 (1.39) | 2.28 (2.47) | 1991–2005 (2003; 2007) | 4 (12) |
| Irby et al. (2018) | 1.23 (2.22) | 1.86 (2.17) | 1993–1995 | 23 |
| Cai et al. (2022) | 1.47 (2.05) | 2.08 (2.04) | 1991–1995 | 62 |
| 本研究 (RUN04a) | 0.27 (0.69) | 0.77 (1.70) | 1995–2005 | 23(主流站点) |
| 本研究 (RUN04a) | 0.48 (0.78) | 0.81 (1.33) | 1995–2005 | 121 |
4. 讨论
4.1. 极端事件下的模型评估
前面的部分已经证明了我们的模型在模拟长期时间尺度上的跨尺度水动力过程的强大性能。在这里,我们基于完全标定运行(RUN04a)将评估扩展到短期天气事件,以进一步突出模型在多个时间尺度上捕捉水动力动力学的能力。飓风是一个理想的测试案例,因为它们可以在短短几天内在近岸水域产生显著的水动力响应(例如风暴潮)。
作为案例研究,我们选择了2003年9月严重影响美国东部的伊莎贝尔飓风(Li et al., 2006)。图13比较了模拟水位与分布在切萨皮克湾主干和支流的七个站点的NOAA潮汐计观测值。现场观测清楚地记录了飓风引起的整个海湾的风暴潮。9月19日左右,随着伊莎贝尔的临近,该地区形成了强烈的西风(图13a)。首先在靠近湾口(Sewells Point和Kiptopeke)的两个站点观测到水位显著上升,然后是湾中部的Lewisetta,随后是上湾的四个站点,那里的亚潮水位超过1.5米。模拟有效地再现了风暴潮的向北传播,展示了在捕捉整个海湾飓风引起的水动力响应方面的卓越能力。
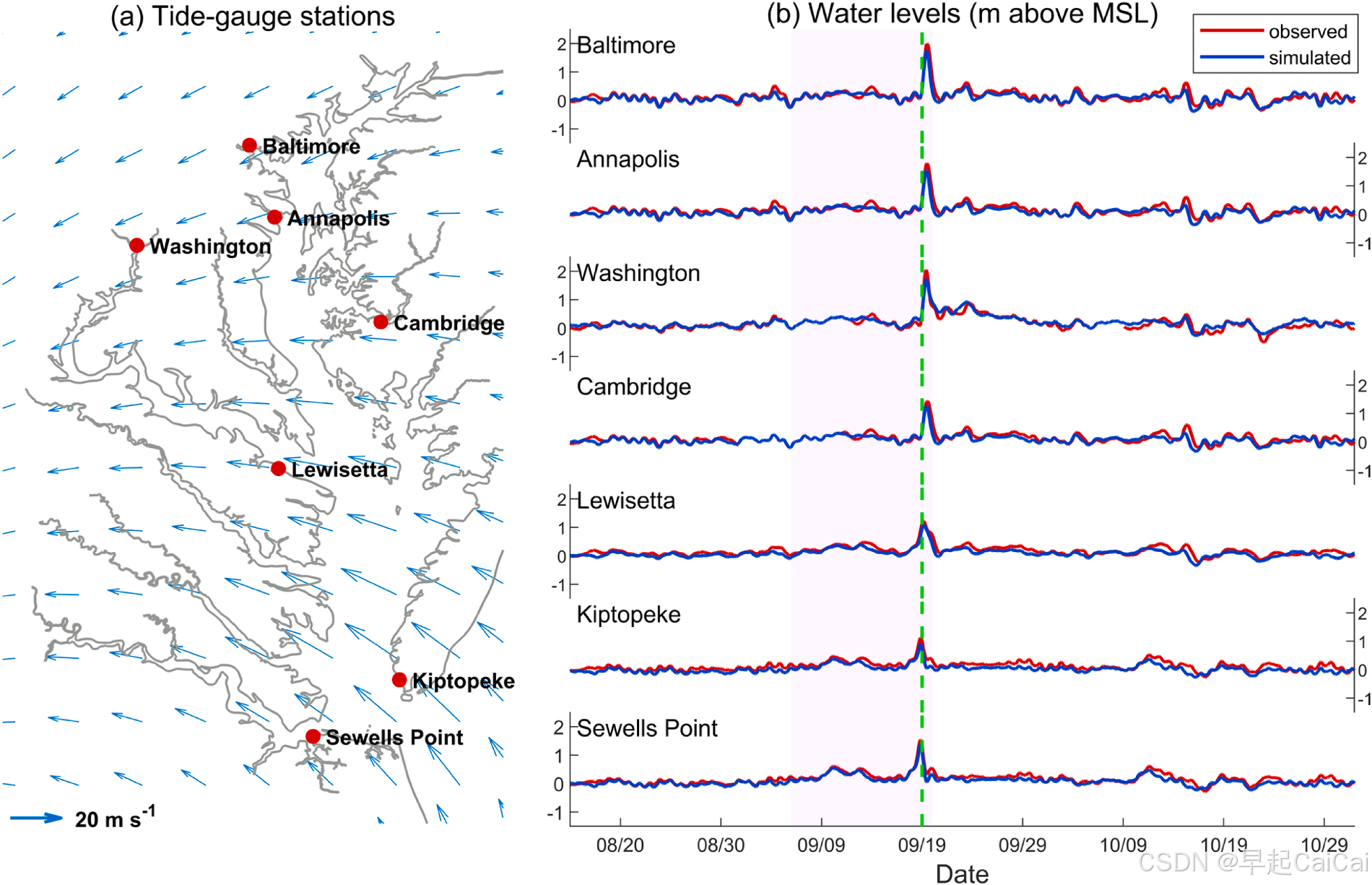
[图13] (a) NOAA潮汐计站点的位置,箭头表示2003年9月19日的ERA5风场。(b) 2003年这些站点12小时移动平均模拟和观测水位的比较,阴影区间表示伊莎贝尔飓风期间(9月6-20日)。绿色虚线标记2003年9月19日。
4.2. 局限性与未来工作
切萨皮克湾代表了一个典型的自然、复杂的河口系统,对大多数海岸模型提出了挑战。建模挑战包括水深表示(Zhang et al., 2024)以及强迫函数的不确定性。除了本文讨论的两个因素外,未来工作中还应检查其他因素。例如,卫星观测显示,湾的水体清澈度在多个时间尺度上表现出显著的时间变化(Son & Wang, 2012; Shi et al., 2013; Turner et al., 2025)。这可能会在一定程度上影响模拟温度的时间变化。沉积物缓冲效应也是温度模拟中不可忽略的影响(Yang et al., 2022)。在目前的模型中,沉积物对近底温度的影响是使用沉积物缓冲层近似的,该缓冲层允许与上覆底层水进行热交换。这种方法假设整个域内具有空间均匀的热交换速率。然而,考虑到不同沉积物类型之间热交换能力的差异,未来可能需要进一步增强以解释这种空间异质性。另一个不确定性与地下水输入有关,因为先前的研究已经表明地下水对温度和盐度有显著影响(Heiss & Michael, 2014; Zhang et al., 2022)。
底部拖曳系数也随时间变化,并可能取决于水流和波浪的幅度(Spitz & Klinck, 1998; Fan et al., 2019)。在湾中,潮汐流在强度上表现出明显的南北差异,在湾口附近水流强得多(Zhong & Li, 2006),但它们对底部拖曳系数的影响在此未被包含。此外,水下水生植被的存在可能在局部水动力学中发挥关键作用,影响水流和湍流(Zhang et al., 2020),因为湾以其广泛的植被覆盖而闻名(Moore et al., 2000)。因此,需要一个完全耦合的水动力-植被模型来准确解释这些相互作用,至少在植被区域(Beudin et al., 2017)。盐度模拟中另一个值得注意的物理过程是泥层上沉积物诱导的层结,它可以通过抑制底边界层中的湍流来减少底摩擦(Adams & Weatherly, 1981; King & Wolanski, 1996; Gabioux et al., 2005)。这个过程可能进一步减少泥层上的潮汐能耗散,从而促进潮汐传播和盐水入侵到支流中。这可能意味着泥浆应该使用更小的曼宁系数。然而,为了准确表示这种效应,需要一个具有适当参数化的耦合水动力-沉积物模型(Wang, 2002)。尽管其他针对湾和其他系统的建模工作已经解决了这些挑战的不同方面,但到目前为止,还缺乏一个能够全面解决整个跨尺度系统、从而证明每个因素相对重要性的集成模型。
在当前工作的基础上,我们利用耦合的水动力-沉积物-植被-波浪-生物地球化学模型,在第七阶段主湾模型的背景下首次尝试解决这些局限性,初步结果与本文所示结果一致(Wang et al., 2026),这进一步证实了本文所示的标定流程。
4.3. 走向可信建模
Zhang et al. (2024) 阐述了许多困扰海岸和河口模型的灰色地带。最恶劣的做法是水深平滑/处理,这从根本上改变了所研究的系统。因此,他们主张在进行定量评估之前,先关注基于过程的定性评估。如果没有像我们在Ye et al. (2018) 和 Cai et al. (2022) 中对湾所做的那样,在模型中正确表示基础水深,本文所取得的进展将是不可能的;事实上,尊重水深是可信建模的第一步也是最重要的一步。
强迫因素的不确定性常常导致标定方法巧妙地补偿不同来源的输入误差。这些"调谐旋钮"代表了建模的灰色地带。因此,本文描述的基于物理的标定方法是朝着可信建模迈出的积极的第一步。事实上,改进的水动力结果也有助于改善水质结果(Wang et al., 2026)。我们完全期望观测技术的进步将继续减少强迫的不确定性,并进一步增强这种可信度。
5. 结论
通过使用一个真实表示切萨皮克湾复杂水深的高分辨率三维非结构网格模型,我们通过可信的、基于物理的标定流程展示了跨尺度水动力模拟中模型技能的显著提升。两个关键强迫因素(水体清澈度和底摩擦)受到高分辨率观测的约束,由此产生的空间变化参数显著提升了模型在整个湾的水位、温度和盐度模拟能力。在CBP维护的121个长期监测站,表层(底层)温度的平均RMSE降低到0.484°C (0.775°C),而对应的表层(底层)盐度的RMSE为0.809 PSU (1.331 PSU)。相对于先前的模拟研究,这些结果代表了温度和盐度RMSE约60%的减少。从我们先前证明水深重要性的研究开始,本研究代表了朝着基于现场观测的可解释和可信模型标定的进一步进展。这项改进现正被纳入EPA CBP的第七阶段河口模型中,并进一步帮助改善水质模拟(Wang et al., 2026)。
数据可用性声明
SCHISM的源代码可在 https://ccrm.vims.edu/schismweb/ 获取。BlueTop水深数据集来自 https://nauticalcharts.noaa.gov/data/blueTopo.html。CoNED水深数据集来自 https://www.usgs.gov/special-topics/coastal-national-elevation-database-applications-project。ERA5大气产品下载自 https://cds.climate.copernicus.eu/datasets/reanalysis-era5-single-levels?tab=download。CMEMS GLORYS再分析数据下载自 https://data.marine.copernicus.eu/product/GLOBAL_MULTIYEAR_PHY.001_030。温度和盐度的现场观测数据可在切萨皮克湾项目数据枢纽(https://datahub.chesapeakebay.net/)获取。SODA 3.15.2再分析数据下载自 https://apdc.soest.hawaii.edu/。usSEABED沉积物产品获取自 https://www.usgs.gov/programs/cmhrp/science/useabed。VIIRS Kd490数据获取自 https://eastcoast.coastwatch.noaa.gov/。NOAA CO-OPS水位观测数据访问自 https://tidesandcurrents.noaa.gov/。平均潮差图集可在 https://www.vims.edu 找到。DIVA方法使用 https://github.com/gher-uliege/DIVAnd.jl 上提供的脚本实现。完全标定运行(RUN04a)的输入文件可在Zenodo上获取(https://doi.org/10.5281/zenodo.4780848)。
CRediT authorship contribution statement
Wenfan Wu: 写作 - 审阅与编辑, 写作 - 初稿, 可视化, 方法, 正式分析, 数据整理, 概念化. Zhengui Wang: 写作 - 审阅与编辑, 可视化, 监督, 方法, 数据整理, 概念化. Y Joseph Zhang: 写作 - 审阅与编辑, 写作 - 初稿, 监督, 资源, 项目管理, 方法, 资金获取, 概念化. Jian Shen: 写作 - 审阅与编辑, 验证, 监督, 资源, 方法. Richard Tian: 写作 - 审阅与编辑, 验证, 监督, 资源, 方法, 调查. Lewis C Linker: 写作 - 审阅与编辑, 验证, 监督, 资源, 项目管理, 方法. Carl F Cerco: 写作 - 审阅与编辑, 可视化, 监督, 方法, 调查.
利益声明
作者声明无已知的竞争性经济利益或个人关系,这些利益或关系可能会对所报道的工作产生影响。
致谢
本研究由美国环保署资助 [grant CB96392201]。所有数值模拟均在威廉玛丽学院研究计算中心(https://www.wm.edu/it/rc)的计算设施上进行。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐



 5
5 0
0- 0



 已为社区贡献9条内容
已为社区贡献9条内容

所有评论(0)