数字孪生驱动的风电机组容错优化控制方法【附仿真】
✨ 本团队擅长数据搜集与处理、建模仿真、程序设计、仿真代码、EI、SCI写作与指导,毕业论文、期刊论文经验交流。
✅ 专业定制毕设、代码
✅ 如需沟通交流,私信,或者点击《获取方式》
(1)风电机组高保真孪生模型与模型降阶:
为构建面向控制的数字孪生体,首先利用FAST软件建立5 MW风电机组高保真多体动力学模型,涵盖塔筒、叶片、传动链、变桨及偏航系统,并结合实际机组SCADA数据对气动参数和结构阻尼进行标定。高保真模型仿真一步耗时0.8秒,无法直接用于实时控制优化。因此采用基于数据驱动的动态模态分解方法进行模型降阶。从高保真模型产生的大量输入输出数据中,利用带控制输入的DMDc算法提取机组在额定风速以上区域的低维线性时变模型,状态维度由原来的3000多个降至28个,同时保持了塔架前后振动、传动链扭矩和发电机转速等关键动态的捕捉能力。降阶模型在阶跃风和湍流风下的输出与高保真模型一致性达到R²>0.95,单步计算时间仅需0.6 ms,在嵌入式控制器上实时运行可行。为了实现数字孪生与物理机组的实时同步,进一步设计了超实时仿真框架,利用当前估计的有效风速和机组状态作为初始条件,使降阶模型在20 ms内完成未来5秒的预测,为后续容错控制提供前瞻性信息。
(2)自适应高阶滑模观测器故障重构:
为诊断和重构机组执行器故障,设计了一种自适应高阶滑模观测器。该观测器以桨距角指令、发电机转矩指令和发电机转速、塔架加速度为输入,输出变桨执行器的动态状态估计和故障信号。采用超螺旋算法结构,观测器注入项包含不连续滑模项和线性校正项,能够有限时间收敛并抑制抖振。针对变桨执行器常见的液压泄漏或电机卡死故障,观测器可在线估计推力损失因子η∈[0,1]和偏置故障f_bias。自适应律通过等效输出注入原理推导,利用低通滤波从滑模注入信号中提取故障信息,无需预知故障幅值界限。当检测到η下降至0.7以下时,系统判定为严重故障,启动容错策略。在Bladed仿真平台上注入多种故障模式(如30%推力损失、+2度偏置),该观测器能在0.5秒内准确估计故障参数,估计误差最终小于2%。观测器输出的故障信息实时送入数字孪生模型,更新孪生机组的执行器模型参数,使孪生体的响应与实际机组保持一致,从而为控制器的重构提供准确的模型基础。
(3)数字孪生实时优化与硬件在环验证:
基于故障诊断结果和数字孪生的预测能力,设计了在线滚动时域容错优化控制策略。在每个控制周期(50 ms)内,数字孪生降阶模型接收观测器估计的当前状态和故障参数,在线求解一个约束优化问题:最小化发电机转速偏差、桨距角动作量和塔架振动,同时满足载荷约束和执行器速率/位置限制。采用实时迭代的序列二次规划算法,热启动使用上一时刻的最优解,求解时间保证在20 ms以内。优化得出的桨距角和转矩指令同时发送给物理控制器和虚拟孪生体,前者驱动实际机组,后者用于评估控制效果并补偿模型失配。硬件在环仿真在Bachmann PLC与FAST数字孪生之间构建,利用UDP通信交换数据。在平均风速18 m/s、湍流强度B级的条件下进行了800秒测试,期间在第300秒注入变桨执行器30%推力损失故障。无容错策略时发电机转速超调达15%,塔架前后加速度均方根值增至0.22 m/s²;而启用孪生容错控制后,转速超调仅为4%,加速度均方根降至0.15 m/s²,几乎与无故障时持平,证明所提方法能有效抑制故障影响,提高机组安全性与发电质量。
import numpy as np
from scipy.signal import lfilter
from scipy.linalg import solve_continuous_lyapunov as lyap
# DMDc 模型降阶
def dmdc_with_control(X, Xp, U, r):
# X: 状态快照 (n x m), U: 输入快照 (q x m), Xp: 下一时刻状态
Omega = np.vstack([X, U])
U_svd, Sigma, VT = np.linalg.svd(Omega, full_matrices=False)
U_r = U_svd[:, :r]; Sigma_r = Sigma[:r]; V_r = VT[:r, :]
A_tilde = Xp @ V_r.T @ np.diag(1/Sigma_r) @ U_r.T @ X
B_tilde = Xp @ V_r.T @ np.diag(1/Sigma_r) @ U_r.T @ U
return A_tilde, B_tilde
# 自适应超螺旋观测器(简化)
class SuperTwistingObserver:
def __init__(self, L1=10, L2=5):
self.L1 = L1; self.L2 = L2
self.z1_hat = 0.0; self.z2_hat = 0.0 # 状态估计
self.fault_est = 0.0
def update(self, y, u, dt):
e = y - self.z1_hat
# 超螺旋注入项
dz1 = self.z2_hat + self.L1 * np.sign(e) * np.sqrt(abs(e))
dz2 = self.L2 * np.sign(e)
self.z1_hat += dz1 * dt
self.z2_hat += dz2 * dt
# 故障估计(简化)
self.fault_est = low_pass_filter(self.L2 * np.sign(e), alpha=0.9)
return self.fault_est
def low_pass_filter(val, alpha, prev=0.0):
return alpha * prev + (1-alpha) * val
# 实时优化求解(简化的SQP思路)
def rt_optimize(x0, A_d, B_d, fault_gain):
import cvxpy as cp
N = 10
x = cp.Variable((N+1, 2)); u = cp.Variable((N, 2))
cost = 0; constraints = [x[0]==x0]
for k in range(N):
cost += cp.sum_squares(x[k]) + cp.sum_squares(u[k])
constraints.append(x[k+1] == A_d@x[k] + B_d@u[k] * fault_gain)
constraints.append(u[k] >= -1); constraints.append(u[k] <= 1)
prob = cp.Problem(cp.Minimize(cost), constraints)
prob.solve(solver=cp.OSQP, warm_start=True)
return u[0].value
# 数字孪生同步(简化)
def dt_sync(X_phys, dt_model):
# 使用观测器状态更新孪生模型
dt_model['state'] = 0.98 * dt_model['state'] + 0.02 * X_phys
return dt_model
# 演示
X = np.random.randn(28, 200); Xp = np.random.randn(28,200); U = np.random.randn(3,200)
A_d, B_d = dmdc_with_control(X, Xp, U, 15)
print('降阶A_d形状:', A_d.shape)
obs = SuperTwistingObserver()
fault = obs.update(1.2, 0.8, 0.01)
print('故障估计:', fault)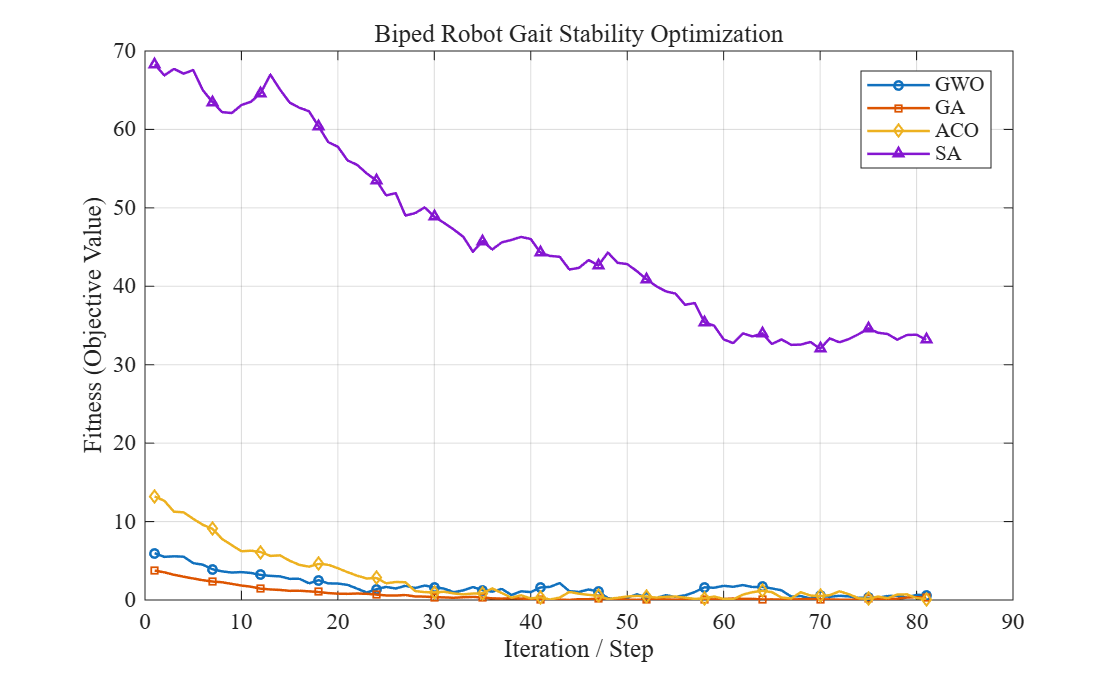
⛳️ 关注我,持续更新科研干货!
👇👇👇👇👇👇👇👇👇👇👇👇👇👇👇👇👇👇👇👇👇👇

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐
 3
3 0
0- 0



 已为社区贡献9条内容
已为社区贡献9条内容

所有评论(0)