从零搭建电机仿真模型:转矩限制、效率MAP查表与 Simulink 避坑 SOP
一、 核心物理基础与数学模型
在准静态(Quasi-static)整车能量流仿真中,电机模型的核心逻辑分为两部分:物理边界限制(外特性)与能量转换损耗(效率 MAP)。
1. 电机外特性限制(转矩包络线)
电机的最大输出转矩 TlimitT_{limit}Tlimit 受限于额定峰值转矩 TmaxT_{max}Tmax、峰值功率 PmaxP_{max}Pmax 以及当前转速 nnn。其分段数学关系为:
Tlimit(n)={Tmax,0≤n≤nbase9550⋅Pmaxn,n>nbaseT_{limit}(n) = \begin{cases} T_{max}, & 0 \le n \le n_{base} \\ \frac{9550 \cdot P_{max}}{n}, & n > n_{base} \end{cases}Tlimit(n)={Tmax,n9550⋅Pmax,0≤n≤nbasen>nbase
其中,nbasen_{base}nbase 为基速(恒转矩区与恒功率区的分界点)。
2. 功率与效率计算
根据当前实际转矩 TactT_{act}Tact 和实际转速 nnn,计算机械功率 PmechP_{mech}Pmech (kW):
Pmech=Tact⋅n9550P_{mech} = \frac{T_{act} \cdot n}{9550}Pmech=9550Tact⋅n
电机的输入/输出电功率 PelecP_{elec}Pelec 受效率 η(n,Tact)\eta(n, T_{act})η(n,Tact) 的影响。效率由 2-D Lookup Table 插值求得:
-
电动模式(驱动,Pmech≥0P_{mech} \ge 0Pmech≥0):消耗电能,
Pelec=PmechηP_{elec} = \frac{P_{mech}}{\eta}Pelec=ηPmech -
发电模式(制动回收,Pmech<0P_{mech} < 0Pmech<0):发出电能,
Pelec=Pmech⋅ηP_{elec} = P_{mech} \cdot \etaPelec=Pmech⋅η
二、 Simulink 详细建模指南
为了确保您在实际工程或论文复现中能够做到“零歧义”落地,我将这份 Simulink 电机准静态能量流建模过程 重新梳理为一份标准操作程序 (SOP)。
本次生成将严格按照“变量初始化 -> 模块清单 (BOM) -> 逻辑流连线 -> 避坑指南”的顺序展开,精确到每一个参数配置和引脚接入点。
第一阶段:环境与变量初始化 (Workspace Preparation)
在 Simulink 开始连线前,必须让模型知道电机的物理边界和效率数据。
操作步骤:
- 打开您的 Simulink 模型。
- 导航栏选择 Modeling -> Model Settings (或按
Ctrl+E)。 - 在左侧菜单树选择 Model Properties,进入 Callbacks 选项卡。
- 选中 InitFcn,在右侧代码框中粘贴以下初始化脚本:
% === 电机外特性物理参数 ===
P_max_kW = 120; % 峰值电功率 (kW)
T_max_Nm = 310; % 峰值机械转矩 (Nm)
% === 效率 MAP 网格定义 ===
% 注意:实际工程中请用 load('your_map_data.mat') 替代以下模拟生成代码
Map_speed_rpm = 0:500:12000; % 25个转速断点
Map_torque_Nm = 0:10:310; % 32个转矩断点
[Grid_N, Grid_T] = meshgrid(Map_speed_rpm, Map_torque_Nm);
% 模拟一个典型的中心高效区 MAP 矩阵 (32x25)
Map_eff_matrix = 0.96 - 1e-8*(Grid_N - 4000).^2 - 1e-6*(Grid_T - 150).^2;
Map_eff_matrix(Map_eff_matrix < 0.6) = 0.6; % 限制效率下限防报错
Map_eff_matrix(Map_eff_matrix > 0.97) = 0.97; % 限制最高效率
第二阶段:模块采购清单 (Block Bill of Materials)
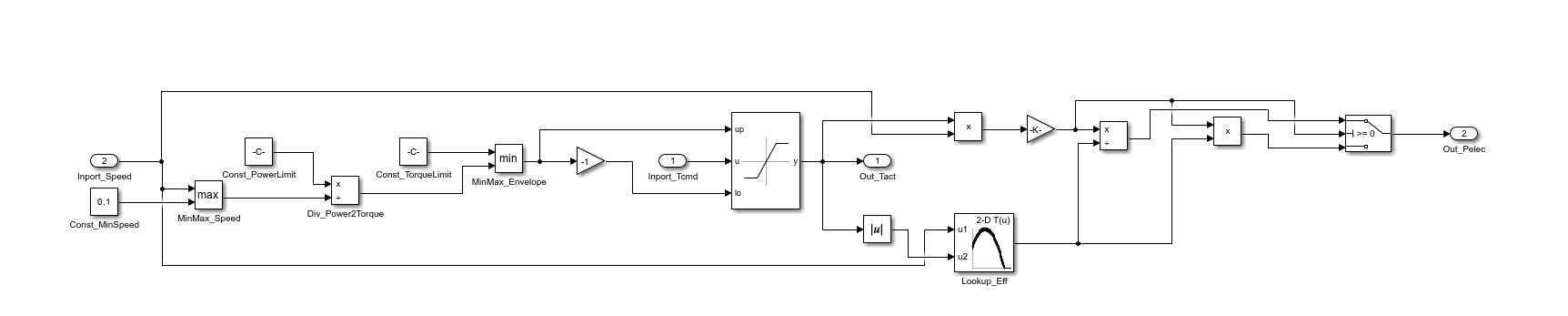
新建一个名为 Electric_Motor 的 Subsystem。双击进入后,请从 Simulink Library Browser 中拖出以下所有模块,并严格按照表格修改参数:
| 自定义模块命名 | 所在模块库路径 | 必须修改的核心参数 |
|---|---|---|
| Inport_Tcmd | Sources / Inport |
Port number: 1 |
| Inport_Speed | Sources / Inport |
Port number: 2 |
| Const_PowerLimit | Sources / Constant |
Value: P_max_kW * 9550 |
| Const_TorqueLimit | Sources / Constant |
Value: T_max_Nm |
| Const_MinSpeed | Sources / Constant |
Value: 0.1 (防止除以零) |
| MinMax_Speed | Math Operations / MinMax |
Function: max |
| Div_Power2Torque | Math Operations / Divide |
Inputs: */ |
| MinMax_Envelope | Math Operations / MinMax |
Function: min |
| Gain_GenLimit | Math Operations / Gain |
Gain: -1 |
| Sat_Dynamic | Math Operations / Saturation Dynamic |
(无修改) |
| Abs_Torque | Math Operations / Abs |
(无修改) |
| Lookup_Eff | Lookup Tables / 2-D Lookup Table |
Table data: Map_eff_matrix' Breakpoints 1: Map_speed_rpm Breakpoints 2: Map_torque_Nm Extrapolation method: Clip (极其重要) |
| Prod_SpeedTorque | Math Operations / Product |
Inputs: ** |
| Gain_To_kW | Math Operations / Gain |
Gain: 1/9550 |
| Div_Motoring | Math Operations / Divide |
Inputs: */ |
| Prod_Generating | Math Operations / Product |
Inputs: ** |
| Switch_Power | Signal Routing / Switch |
Criteria: u2 >= Threshold Threshold: 0 |
| Out_Tact | Sinks / Outport |
Port number: 1 |
| Out_Pelec | Sinks / Outport |
Port number: 2 |
第三阶段:逻辑连线与装配 (Step-by-Step Routing)
为了确保逻辑清晰,我们将连线分为三个功能子网络:
子网络 1:动态转矩边界计算 (TlimitT_{limit}Tlimit)
此部分旨在根据当前转速计算电机能发出的最大扭矩。公式逻辑:Tlimit=min(Tmax,Pmax⋅9550nact)T_{limit} = \min(T_{max}, \frac{P_{max} \cdot 9550}{n_{act}})Tlimit=min(Tmax,nactPmax⋅9550)
- 将 Inport_Speed 和 Const_MinSpeed (值 0.1) 接入 MinMax_Speed (max)。这一步输出安全的非零转速。
- 将 Const_PowerLimit 接入 Div_Power2Torque 的
*端(分子)。 - 将 MinMax_Speed 的输出接入 Div_Power2Torque 的
/端(分母)。此时输出的是恒功率区限制转矩。 - 将 Const_TorqueLimit 接入 MinMax_Envelope (min) 的输入 1。
- 将 Div_Power2Torque 的输出接入 MinMax_Envelope (min) 的输入 2。
- 👉 此时 MinMax_Envelope 的输出即为正向最大转矩 (驱动极限)。
- 从 MinMax_Envelope 的输出引出一根线,接入 Gain_GenLimit (-1)。
- 👉 此时 Gain_GenLimit 的输出即为反向最大转矩 (发电极限)。
子网络 2:指令转矩饱和与查表 (Saturation & Lookup)
此部分限制需求转矩,并查取效率。
- Sat_Dynamic 有三个输入端 (
up,In,lo):
- 将 MinMax_Envelope 的输出连到
up端。 - 将 Inport_Tcmd 连到
In端。 - 将 Gain_GenLimit 的输出连到
lo端。
- Sat_Dynamic 的输出就是真实的电机输出转矩。将其直连到 Out_Tact。
- 从 Sat_Dynamic 的输出引出一根线,接入 Abs_Torque (取绝对值)。
- 将 Abs_Torque 的输出接入 Lookup_Eff 的第一个输入端(对应 Breakpoints 1,转速轴)。注意:如果您的矩阵行列定义不同,请确保输入端与 Breakpoints 对应正确,通常端口 1 查行,端口 2 查列。
- 将 Inport_Speed 引出一根线,接入 Lookup_Eff 的第二个输入端。
- 👉 此时 Lookup_Eff 的输出即为当前工况的电机效率 η\etaη。
子网络 3:能量流状态判断与功率计算
电功率计算逻辑:电动时 Pelec=Pmech/ηP_{elec} = P_{mech} / \etaPelec=Pmech/η,发电时 Pelec=Pmech⋅ηP_{elec} = P_{mech} \cdot \etaPelec=Pmech⋅η。
- 将 Sat_Dynamic (实际转矩) 和 Inport_Speed 接入 Prod_SpeedTorque 相乘。
- 将 Prod_SpeedTorque 的输出接入 Gain_To_kW (1/9550)。
- 👉 此时获得了带有正负号的机械功率 PmechP_{mech}Pmech (kW)。正为电动,负为发电。
- 电动耗电分支:将 PmechP_{mech}Pmech 接入 Div_Motoring 的
*端,将 Lookup_Eff 的输出 η\etaη 接入其/端。 - 发电回馈分支:将 PmechP_{mech}Pmech 和 Lookup_Eff 的输出 η\etaη 接入 Prod_Generating 的两个输入端。
- 状态判定 Switch 配置:
- 第一个输入口 (条件成立时输出):接入 Div_Motoring。
- 第二个输入口 (控制信号):接入机械功率 PmechP_{mech}Pmech。
- 第三个输入口 (条件不成立时输出):接入 Prod_Generating。
- 将 Switch_Power 的输出接入 Out_Pelec。
第四阶段:模型避坑与鲁棒性检查 (Troubleshooting)
如果您在跑闭环工况(如 WLTC、NEDC)时发现模型报错或整车能耗数据异常,请立刻检查以下两点:
- Extrapolation (外推) 灾难:在
2-D Lookup Table模块中,Extrapolation method绝对不能选Linear。当车辆下坡或急刹车导致电机转速/转矩短暂超出 MAP 标定范围时,线性外推可能会算出 150% 的荒谬效率或负效率,导致仿真直接崩溃。必须设置为Clip(截断边缘值)。 - 代数环 (Algebraic Loop):如果您将电机模型放入整车动力学中,
Out_Tact又反算回车速反馈给Inport_Speed,可能会产生代数环警告。解决方法:在Inport_Speed后方串联一个Memory模块或Unit Delay模块打破代数环。
建立一个电机模型,本质上就是用数学公式和控制逻辑来描述物理世界中真实的能量转换过程。
在我们搭建的“准静态能量流模型(Quasi-static Energy Flow Model)”中,我们忽略了电机内部毫秒级的电磁瞬态变化(比如定子磁链、逆变器高频开关),而是将电机视为一个“能量转换黑盒”。
这个黑盒只需要搞清楚两件事:“我最大能出多大的一把力(物理边界)” 和 “我转换能量时要浪费掉多少(能量损耗)”。
以下是具体的数学物理原理,以及它们是如何一一对应到您的 Simulink 模块上的:
一、 物理边界:外特性限制 (Torque Limits)
1. 物理与数学原理
电机不能无限制地输出转矩。它的输出能力受限于两个核心物理瓶颈:
- 最大电流限制(低速区):决定了电机的峰值转矩 TmaxT_{max}Tmax。在低于“基速 (nbasen_{base}nbase)”时,电机可以保持这个最大转矩,这被称为“恒转矩区”。
- 最大电压/电池功率限制(高速区):决定了电机的峰值功率 PmaxP_{max}Pmax。当转速超过基速后,为了维持功率不超载,转矩必须随着转速的升高而反比例下降,这被称为“恒功率区”。
这在数学上是一个分段函数(取两者的较小值):
Tlimit(n)=min(Tmax,Pmax⋅9550n)T_{limit}(n) = \min\left(T_{max}, \frac{P_{max} \cdot 9550}{n}\right)Tlimit(n)=min(Tmax,nPmax⋅9550)
2. Simulink 模块映射
我们在 Simulink 中的第一个逻辑子网络,就是为了实时求解上面这个公式:
- **
Const_PowerLimit&Div_Power2Torque**:这两个模块配合,计算出了公式右边的 Pmax⋅9550n\frac{P_{max} \cdot 9550}{n}nPmax⋅9550。它告诉系统:“以现在的转速,如果满功率运行,能输出多大扭矩”。 Const_TorqueLimit:代表公式左边的常数 TmaxT_{max}Tmax。MinMax_Envelope(选 min):这是核心决策模块。它比较 TmaxT_{max}Tmax 和刚才算出的恒功率扭矩,谁更小就选谁,完美实现了物理上的分段函数限制,输出正向极限。Gain_GenLimit(乘 -1):物理原理上,大多数车用电机在发电(制动)时的极限扭矩与驱动时是对称的。乘 -1 就得到了负向的极限。Sat_Dynamic(动态限幅):物理意义上的“执行器”。驾驶员可能一脚电门踩到底(需求T_cmd极大),但这个模块会强制把输出的实际转矩T_act阉割在算出来的 [Tlimit_min,Tlimit_max][T_{limit\_min}, T_{limit\_max}][Tlimit_min,Tlimit_max] 范围内,保护电机不被烧毁。
二、 能量损耗:效率 MAP (Efficiency MAP)
1. 物理与数学原理
电机在将电能转化为机械能(或反之)时,由于铜损(线圈发热 I2RI^2RI2R)、铁损(涡流和磁滞损耗)以及轴承的机械摩擦,能量无法 100% 传递。
效率 η\etaη 不是一个固定值,而是一个高度依赖于当前转速 nnn 和转矩 TTT 的非线性函数:η=f(n,T)\eta = f(n, T)η=f(n,T)。通常在电机标称转速和中高扭矩区间,效率最高(可达 95% 以上)。
2. Simulink 模块映射
Abs_Torque(绝对值模块):物理意义是,电机正转驱动和反转制动时,只要转速和扭矩的绝对大小一样,其内部的电磁损耗特性是高度近似对称的。为了查表方便,统一转为正值。Lookup_Eff(二维查表模块):这是能量损耗模型的“灵魂”。它本质上是一个经验数据库(基于台架实测数据)。当模型输入当前的实际转速和转矩时,它利用数学上的双线性插值法 (Bilinear Interpolation),在 32x25 的网格点之间平滑地估算出一个当前的瞬间效率 η\etaη。
三、 能量守恒:功率转换逻辑 (Power Flow)
1. 物理与数学原理
整车仿真最关心的就是电功率 PelecP_{elec}Pelec(用于扣减电池 SOC)。
首先,根据牛顿力学算出现在电机轴上输出的机械功率:
Pmech=Tact⋅n9550P_{mech} = \frac{T_{act} \cdot n}{9550}Pmech=9550Tact⋅n
根据能量守恒定律,损耗必须被考虑进去:
- 电动状态 (消耗电池):机械功率为正。为了在轴上输出这么多机械功,电机必须从电池抽取更多的电能来克服损耗。
Pelec=PmechηP_{elec} = \frac{P_{mech}}{\eta}Pelec=ηPmech
- 发电状态 (充入电池):机械功率为负(车辆靠惯性反拖电机)。轴上输入的机械能,经过损耗后,充入电池的电能会变少。
Pelec=Pmech⋅ηP_{elec} = P_{mech} \cdot \etaPelec=Pmech⋅η
2. Simulink 模块映射
- **
Prod_SpeedTorque&Gain_To_kW**:就是执行 Pmech=T⋅n9550P_{mech} = \frac{T \cdot n}{9550}Pmech=9550T⋅n 的计算器。 Div_Motoring:执行除法,对应电动状态公式。Prod_Generating:执行乘法,对应发电状态公式。Switch_Power:物理意义上的“整车能量流控制器”。它实时监测 PmechP_{mech}Pmech 的正负号。只要检测到 ≥0\ge 0≥0,就切通除法模块的线路(放电);一旦 <0< 0<0,瞬间切通乘法模块的线路(充电回收),输出最终真实的 PelecP_{elec}Pelec。
为了让您更直观地感受这些公式是如何在不同转速下运作的,我为您生成了一个电机外特性与功率计算的交互式探索器。您可以在下方调整电机的设计参数和实时工况,观察 TlimitT_{limit}Tlimit 和最终电功率的变化规律。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐

 5
5 0
0- 0



 已为社区贡献18条内容
已为社区贡献18条内容

所有评论(0)