系统设计练习 - 实时街头抓拍系统
系统要求和范围:
- 从大量摄像头实时接收视频流
- AI model辨别车辆(车牌,颜色,和车型)
- 按车牌,属性搜索历史记录
- 订阅alert(例如某车出现的时刻)
Non-functional requirements:
- 近乎实时系统,端到端延迟控制在2到5秒
- 高可用
- 高可扩展
API设计
- PUT /video {"id": "<cameraId> + <timestamp>"} -> 200OK: 摄像头存储视频
- POST /vehicle {"color": <color>, "model": <model>, "license": <license>} -> [<vihicle>]: 查询车辆
- PUT /alert {"license": [<license>]} -> 200OK: 创建车辆出现的alert
系统架构设计
架构图如下: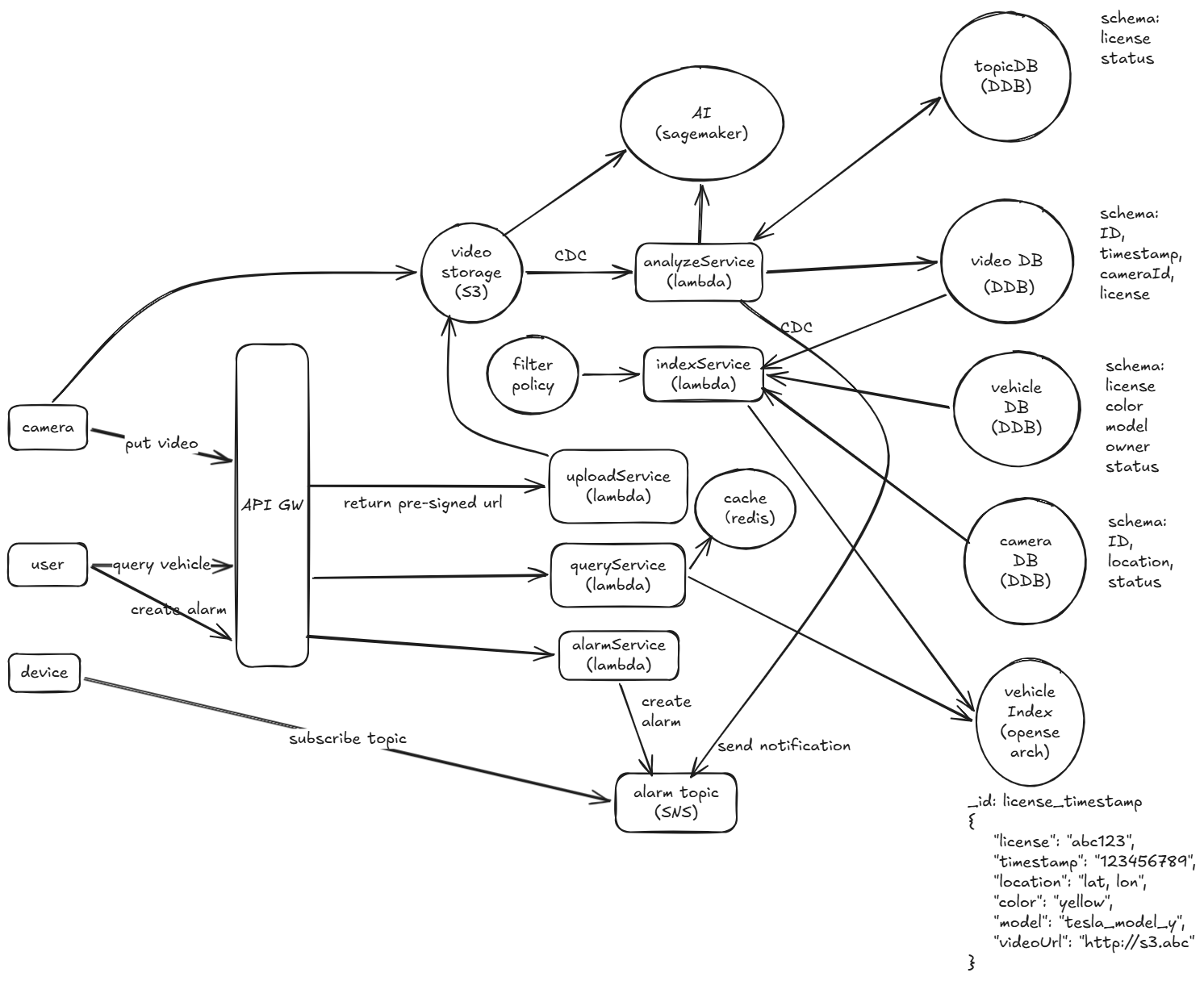
描述如下:
1. camera捕捉到video后向后端service发送put请求。后端service生成S3 presigned url传给camera。camera将video上传到S3。
2. analyzeService捕捉到S3有新的视频对象生成,将video发送给AI进行分析,并将结果存储到videoDB。
3. indexService捕捉到DDB有新的record生成,根据license和camera在DB里的信息,生成OpenIndex的document,存储到OpenSearch。
4. analyzeService查询topicDB,如果已经有关于该license的topic,即向SNS相关topic发送一个通知。
5. user可以通过queryService发送查询请求。为了处理hot query,我们可以加上redis作为cache。
6. 用户可以通过alarmService创建alarm topic。同时将device或者邮箱subscribe到相关的topic。
讨论
1. 使用到lambda,s3,sagemaker,ddb,opensearch,sns。需要注意的是ddb的scale基于partition。我们使用了ID,license,作为partition key。总体来说出现hot partition的可能性很低。OpenSearch需要详细设计index的shards和replica count。我们应该用多个小的index存储数据,比如每天一个index,来降低query的latency。
2. 我们有两个改变数据的api,put video和put alert。如果call失败,可以retry,因为我们可以保证我们的api call是idempotent的。更好的方式是我们可以考虑在service端加入queue。这样我们可以在service retry失败的操作。这样更加resilient,同时解耦了用户请求和请求的处理。
3. 时延问题。系统对时延要求比较高。按照我们目前的设计有两个问题,第一,对于完整video的上传可能会造成时延问题,第二,我们有两处通过CDC进行操作的异步处理,对时延也是一个risk。这里我们可以kaolv两个改进:第一,我们考虑在device或者edge增加处理能力,例如sample video,或者直接调用edge AI model进行预处理甚至完成AI调用。这样可以大大减轻service端的负载。第二,我们可以考虑使用Kafka和FLINK这样的流和流处理服务,在FLINK里完成对AI的调用和到OpenSearch document的整合。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐
 9
9 0
0- 0



 已为社区贡献4条内容
已为社区贡献4条内容

所有评论(0)