Clutter-Aware Integrated Sensing and Communication: Models, Methods, and Future Directions (II)
文章目录
V. Clutter Supression in ISAC Systems
基于第四节中的杂波模型和估计方法,本节重点关注在受杂波污染的 ISAC 测量上运行的接收端杂波抑制。核心要素反映了经典的雷达处理,包括利用多普勒分离的慢时间滤波,利用角度分离的空间波束赋形和置零,以及由干扰协方差估计实现的联合空时自适应滤波。这些操作可以解释为在多普勒、角度和联合域中的线性差分、投影和自适应加权。以下方法假设采用前面介绍的 MIMO-OFDM 波形,但一旦获得合适的空时快拍,它们也适用于其他传感波形。对于宽带处理,还需要频域快拍。
ISAC 引入了影响算法设计和性能的额外问题。探测波形通常是数据相关的,并且在传感接收器处可能仅部分已知。冷杂波和热杂波可能共存并随环境和网络流量演变,并且用于协方差估计的辅助数据通常是有限且异构的。宽带操作进一步产生依赖于子载波的阵列响应,这推动了每个子载波或子带的自适应以及跨频率的仔细重组。因此,我们按可用的处理维度来组织讨论。我们
- 从慢时间抑制开始,
- 转向空间域方法
- 然后回顾针对耦合角度-多普勒场景(coupled angle–Doppler scenarios)的空时和空频时处理。
- 我们以辅助知识(knowledge-aided,KA)和基于学习的方法结束。
对于每种情况,我们总结了适用的场景、样本支持要求和实现问题,并以应用指南得出结论(conclude with application guidelines)。
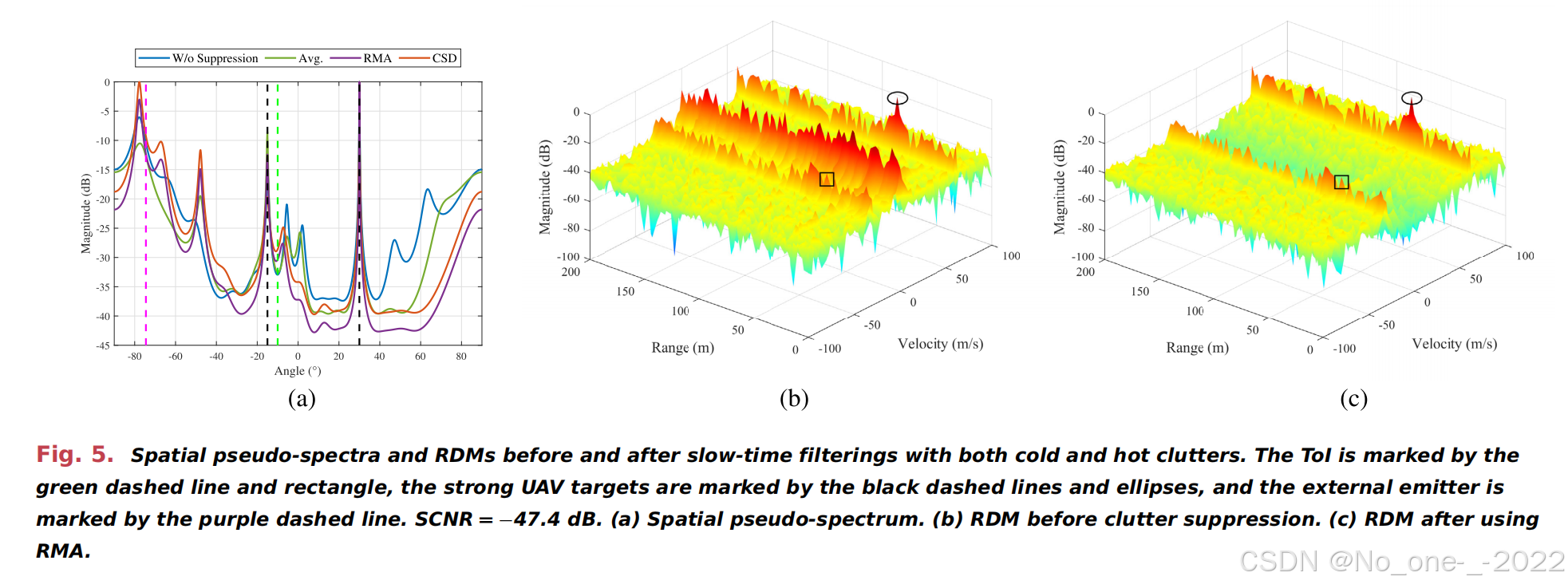
图 5. 存在冷、热杂波的情况下,慢时间滤波前后的空间伪谱和距离-多普勒图 (RDM)。感兴趣目标 (ToI) 由绿色虚线和矩形标记,强无人机 (UAV) 目标由黑色虚线和椭圆标记,外部辐射源由紫色虚线标记。SCNR = -47.4 dB。(a) 空间伪谱。(b) 杂波抑制前的 RDM。 (c) \text{(c)} (c) 使用 RMA 后的 RDM。
A. Slow-Time-Domain Processing
慢时间处理方法通过沿慢时间索引应用一维时间滤波,利用(准)静止杂波和运动目标之间的多普勒对比度。基于第三节中的角度门控和波形去随机化框架,令 y p , n [ ℓ ] \mathbf{y}_{p,n}[\ell] yp,n[ℓ] 表示在长度为 L L L 的 CPI 内,在角度扇区 p p p 、子载波 n n n 和 OFDM 符号 ℓ \ell ℓ 处受杂波污染的回波。下面回顾的大多数慢时间抑制方法可以写成统一形式 y ~ p , n [ ℓ ] = y p , n [ ℓ ] − y ^ c , p , n [ ℓ ] \tilde{\mathbf{y}}_{p,n}[\ell] = \mathbf{y}_{p,n}[\ell] - \widehat{\mathbf{y}}_{\text{c},p,n}[\ell] y~p,n[ℓ]=yp,n[ℓ]−y c,p,n[ℓ] ,其中 y ^ c , p , n [ ℓ ] \widehat{\mathbf{y}}_{\text{c},p,n}[\ell] y c,p,n[ℓ] 是通过以下方式获得的杂波/背景估计:1)基于运动目标指示(MTI)的高通滤波;2)背景估计和减法;或 3)基于模型的自适应跟踪,如卡尔曼滤波。
- 基于 MTI 的方法(High-Pass Filtering,高通滤波):MTI 方法通过沿慢时间应用离散时间高通滤波来抑制低多普勒杂波。一种经典方法是单延迟对消器(the single-delay canceller,SDC) [65], [66]
y ~ p , n [ ℓ ] = y p , n [ ℓ ] − y p , n [ ℓ − G d ] , G d ∈ Z + (74) \tilde{\mathbf{y}}_{p,n}[\ell] = \mathbf{y}_{p,n}[\ell] - \mathbf{y}_{p,n}[\ell - G_d], \quad G_d \in \mathbb{Z}_+ \tag{74} y~p,n[ℓ]=yp,n[ℓ]−yp,n[ℓ−Gd],Gd∈Z+(74)
其多普勒响应由下式给出
H SDC ( f D ) = 1 − e − j 2 π f D G d T sym (75) H_{\text{SDC}}(f_D) = 1 - e^{-j2\pi f_D G_d T_{\text{sym}}} \tag{75} HSDC(fD)=1−e−j2πfDGdTsym(75)
其中 f D f_D fD 在无模糊区间 [ − 1 / ( 2 T sym ) , 1 / ( 2 T sym ) ) [-1/(2T_{\text{sym}}), 1/(2T_{\text{sym}})) [−1/(2Tsym),1/(2Tsym)) 内解释。虽然 SDC 在 f D ≈ 0 f_D \approx 0 fD≈0 附近提供强烈的抑制,但它在以下位置表现出频谱零点
f D blind = m G d T sym , m ∈ Z . (76) f_D^{\text{blind}} = \frac{m}{G_d T_{\text{sym}}}, \quad m \in \mathbb{Z}. \tag{76} fDblind=GdTsymm,m∈Z.(76)
这些零点产生了盲多普勒区域,会衰减多普勒落在零点位置附近的目标。此外,噪声方差固有地增加;双脉冲 SDC 使其翻倍,更高阶的差分进一步放大了它,因此需要仔细的阈值校准(necessitating careful threshold calibration)。为了减轻对低多普勒目标(例如,行人)的抑制,选择更大的延迟间隔 G d > 1 G_d > 1 Gd>1 或采用无限脉冲响应(infinite impulse response,IIR)高通滤波器可以在杂波抑制深度和目标失真之间提供灵活的权衡。
基于 MTI 的杂波抑制已在最近的 ISAC 工作中得到有效证明。例如,
- Luo 等人 [67] 在波束扫描框架内的慢时间上实现了 IIR 高通滤波器,增强了动态车辆场景中后续的 root-MUSIC 和 GLRT 性能。
- 为了解决异步车辆网络中定时和 CFO 带来的同步挑战,Wang 等人 [65] 在 MTI 处理之前引入了循环移位杂波图相关(CMCC)同步方案。该方法利用环境杂波图作为参考指纹,并在异步条件下产生了优于传统递归均值平均(recursive mean averaging,RMA)方法的改进。
-
背景估计与相减方法:背景相减通过预测缓慢变化的杂波分量并将其从观测值中减去,从而提高目标的可见度 [68]。主要的设计选择是如何从慢时间历史中构建背景估计。在下文中,我们将回顾基于符号级平均的批量估计、基于指数平滑的递归估计以及基于差分的一步预测器。
-
a) 符号级平均与相减:该方法假设杂波在 CPI 内保持平稳或表现出极小的变化。杂波估计是通过对多个符号上接收到的信号求平均来计算的
y ^ c , p , n stat = 1 L ∑ m = 0 L − 1 y p , n [ m ] (77) \widehat{\mathbf{y}}_{\text{c},p,n}^{\text{stat}} = \frac{1}{L} \sum_{m=0}^{L-1} \mathbf{y}_{p,n}[m] \tag{77} y c,p,nstat=L1m=0∑L−1yp,n[m](77) y ~ p , n [ ℓ ] = y p , n [ ℓ ] − y ^ c , p , n stat (78) \tilde{\mathbf{y}}_{p,n}[\ell] = \mathbf{y}_{p,n}[\ell] - \widehat{\mathbf{y}}_{\text{c},p,n}^{\text{stat}} \tag{78} y~p,n[ℓ]=yp,n[ℓ]−y c,p,nstat(78)
符号级平均已被有效地集成到多子载波联合检测方法中,通过利用频率分集来改进角度-多普勒估计 [10], [69]。 [70] 中的 YOLO 方案在支持波束斜视的架构中应用了符号级平均,展示了针对大角度杂波抑制的鲁棒性能。 -
b) RMA:当杂波统计特性随时间缓慢漂移时,RMA 通过指数平滑更新递归杂波图估计
y ^ c , p , n [ ℓ ] = ρ y ^ c , p , n [ ℓ − 1 ] + ( 1 − ρ ) y p , n [ ℓ ] (79) \widehat{\mathbf{y}}_{\text{c},p,n}[\ell] = \rho \widehat{\mathbf{y}}_{\text{c},p,n}[\ell - 1] + (1 - \rho) \mathbf{y}_{p,n}[\ell] \tag{79} y c,p,n[ℓ]=ρy c,p,n[ℓ−1]+(1−ρ)yp,n[ℓ](79) y ~ p , n [ ℓ ] = y p , n [ ℓ ] − y ^ c , p , n [ ℓ ] (80) \tilde{\mathbf{y}}_{p,n}[\ell] = \mathbf{y}_{p,n}[\ell] - \widehat{\mathbf{y}}_{\text{c},p,n}[\ell] \tag{80} y~p,n[ℓ]=yp,n[ℓ]−y c,p,n[ℓ](80)
其中参数 0 < ρ < 1 0 < \rho < 1 0<ρ<1 在收敛速度与稳定性之间进行权衡。在频域中,所得的残差序列表现为具有在 f D ≈ 0 f_D \approx 0 fD≈0 附近可调陷波的 IIR 高通滤波器,与针对缓慢漂移杂波的批量平均相比,能够提供改进的鲁棒性。对感知移动网络中 RMA 的详细研究表明,平衡收敛速度和稳定性的最佳选择为 ρ ≈ 0.99 ∼ 0.995 \rho \approx 0.99 \sim 0.995 ρ≈0.99∼0.995 [71]。 -
c) 连续符号差分 (CSD):CSD 是 SDC 在 G d = 1 G_d = 1 Gd=1 时的一个特例,可以解释为一步杂波预测器 y ^ c , p , n [ ℓ ] = y p , n [ ℓ − 1 ] \widehat{\mathbf{y}}_{\text{c},p,n}[\ell] = \mathbf{y}_{p,n}[\ell - 1] y c,p,n[ℓ]=yp,n[ℓ−1] 。它试图最小化预测误差
y ~ p , n [ ℓ ] = y p , n [ ℓ ] − y p , n [ ℓ − 1 ] (81) \tilde{\mathbf{y}}_{p,n}[\ell] = \mathbf{y}_{p,n}[\ell] - \mathbf{y}_{p,n}[\ell - 1] \tag{81} y~p,n[ℓ]=yp,n[ℓ]−yp,n[ℓ−1](81)
这有效地抑制了静态或缓慢变化的杂波,但增加了残余噪声,并且可能像其他基于差分的 MTI 滤波器一样衰减极低多普勒目标。其鲁棒的 ISAC 杂波抑制性能已在 [66] 中得到实验证实,特别是当与后续的二维 IFFT 和基于 MUSIC 的参数估计相结合时。
-
-
自适应滤波技术:自适应滤波技术,如卡尔曼滤波器(KF),通过将杂波的慢时间演变建模为一阶自回归过程来处理时间相关的杂波。如前所述,在进行角度门控和波形去随机化之后,杂波分量 y c , p , n [ ℓ ] \mathbf{y}_{\text{c},p,n}[\ell] yc,p,n[ℓ] 表示为
y c , p , n [ ℓ ] = a c y c , p , n [ ℓ − 1 ] + ϵ p , n [ ℓ ] (82) \mathbf{y}_{\text{c},p,n}[\ell] = a_c \mathbf{y}_{\text{c},p,n}[\ell - 1] + \boldsymbol{\epsilon}_{p,n}[\ell] \tag{82} yc,p,n[ℓ]=acyc,p,n[ℓ−1]+ϵp,n[ℓ](82)
其中 a c a_c ac 表征时间相关性,而 ϵ p , n [ ℓ ] \boldsymbol{\epsilon}_{p,n}[\ell] ϵp,n[ℓ] 表示代表杂波演变不确定性的过程噪声。包含杂波、目标信号和噪声的相应观测模型表示为
y p , n [ ℓ ] = y t , p , n [ ℓ ] + y c , p , n [ ℓ ] + z p , n [ ℓ ] (83) \mathbf{y}_{p,n}[\ell] = \mathbf{y}_{\text{t},p,n}[\ell] + \mathbf{y}_{\text{c},p,n}[\ell] + \mathbf{z}_{p,n}[\ell] \tag{83} yp,n[ℓ]=yt,p,n[ℓ]+yc,p,n[ℓ]+zp,n[ℓ](83)
KF 通过标准的预测和更新步骤递归地估计杂波状态。随后,通过从观测信号中减去估计的杂波状态 y ^ c , p , n [ ℓ ] \widehat{\mathbf{y}}_{\text{c},p,n}[\ell] y c,p,n[ℓ] 来实现杂波抑制
y ~ p , n [ ℓ ] = y p , n [ ℓ ] − y ^ c , p , n [ ℓ ] (84) \tilde{\mathbf{y}}_{p,n}[\ell] = \mathbf{y}_{p,n}[\ell] - \widehat{\mathbf{y}}_{\text{c},p,n}[\ell] \tag{84} y~p,n[ℓ]=yp,n[ℓ]−y c,p,n[ℓ](84)
在实际实现中,可以通过集成通信辅助的估计方法或基于神经网络的预测器,调整模型参数以应对动态杂波条件,从而进一步增强 KF 的鲁棒性。
上面讨论的每种慢时间杂波抑制方法都具有不同的优势和局限性。基于 MTI 的方法在静止环境中提供了简单而有效的杂波抑制,但存在衰减低多普勒目标和放大噪声的风险。背景估计技术(符号级平均和 RMA)能够稳健地处理缓慢漂移的杂波,但需要仔细的调整和稳定的系统同步。自适应卡尔曼滤波为非平稳杂波提供了增强的灵活性,但增加了计算复杂度和同步要求。选择合适的慢时间处理策略需要对杂波特性、目标动态和实际系统约束进行透彻的分析。
B. Spatial-Domain Processing
空域杂波抑制利用接收阵列来衰减来自非期望方向的干扰,同时保持对目标的增益。可以将空间组合器应用于式 (8) 中的 N r N_r Nr 维快拍,或者应用于波形去随机化和距离聚焦后获得的距离选通快拍,这取决于待测单元和训练数据是如何定义的。
在宽带 MIMO-OFDM 中,由于波束斜视,导向矢量 b n ( θ ) \mathbf{b}_n(\theta) bn(θ) 随子载波索引而变化,因此组合器通常是针对每个子载波或在阵列响应和干扰统计特性近似平稳的窄子带内设计的。基于第 III-B 节中空间滤波的角度门控作用,我们接下来总结杂波感知的空间设计,这些设计
- 要么施加显式的零点约束,
- 要么自适应于估计的干扰协方差。
在本节中, R I , n ≜ E { y n [ ℓ ] y n H [ ℓ ] } ∈ C N r × N r \mathbf{R}_{I,n} \triangleq \mathbb{E}\{\mathbf{y}_n[\ell]\mathbf{y}_n^H[\ell]\} \in \mathbb{C}^{N_r \times N_r} RI,n≜E{yn[ℓ]ynH[ℓ]}∈CNr×Nr 表示每个子载波的空间扰动协方差,或者当 y n [ ℓ ] \mathbf{y}_n[\ell] yn[ℓ] 被 y p , τ [ ℓ ] \mathbf{y}_{p,\tau}[\ell] yp,τ[ℓ] 替换时的距离选通对应物(its range-gated counterpart)。
- 确定性波束置零:当先验已知少量主要杂波方向或可以可靠地估计这些方向时,确定性波束置零是一种简单且计算效率高的解决方案,例如,从杂波图 [17], [73] 或从高 SCNR 空间伪谱中估计。其基本方法包括在杂波方向上放置深度零点,同时在目标方向上保持无失真接收 [74]。令 { θ c , 1 , … , θ c , C 0 } \{\theta_{c,1}, \dots, \theta_{c,C_0}\} {θc,1,…,θc,C0} 表示为置零选择的杂波 AoA 集合,并定义杂波导向矩阵 B c , n = [ b n ( θ c , 1 ) , … , b n ( θ c , C 0 ) ] ∈ C N r × C 0 \mathbf{B}_{c,n} = [\mathbf{b}_n(\theta_{c,1}), \dots, \mathbf{b}_n(\theta_{c,C_0})] \in \mathbb{C}^{N_r \times C_0} Bc,n=[bn(θc,1),…,bn(θc,C0)]∈CNr×C0 。正交于由 B c , n \mathbf{B}_{c,n} Bc,n 张成子空间的投影矩阵为
P ⊥ , n = I N r − B c , n B c , n † (85) \mathbf{P}_{\perp, n} = \mathbf{I}_{N_r} - \mathbf{B}_{c,n} \mathbf{B}_{c,n}^{\dagger} \tag{85} P⊥,n=INr−Bc,nBc,n†(85)
其中 ( ⋅ ) † (\cdot)^{\dagger} (⋅)† 表示 Moore-Penrose 伪逆。当 B c , n \mathbf{B}_{c,n} Bc,n 具有全列秩时, B c , n † = ( B c , n H B c , n ) − 1 B c , n H \mathbf{B}_{c,n}^{\dagger} = (\mathbf{B}_{c,n}^H \mathbf{B}_{c,n})^{-1} \mathbf{B}_{c,n}^H Bc,n†=(Bc,nHBc,n)−1Bc,nH 。当 B c , n H B c , n \mathbf{B}_{c,n}^H \mathbf{B}_{c,n} Bc,nHBc,n 条件数较差时,正则化器可以提高数值稳定性。此时,对目标 AoA θ t \theta_t θt 具有单位增益的无失真空间组合器(a distortionless spatial combiner)由下式给出
u det , n = P ⊥ , n b n ( θ t ) b n H ( θ t ) P ⊥ , n b n ( θ t ) . (86) \mathbf{u}_{\text{det},n} = \frac{\mathbf{P}_{\perp, n} \mathbf{b}_n(\theta_t)}{\mathbf{b}_n^H(\theta_t) \mathbf{P}_{\perp, n} \mathbf{b}_n(\theta_t)}. \tag{86} udet,n=bnH(θt)P⊥,nbn(θt)P⊥,nbn(θt).(86)
该设计强制 u det , n b n ( θ t ) = 1 \mathbf{u}_{\text{det},n} \mathbf{b}_n(\theta_t) = 1 udet,nbn(θt)=1 ,同时将零点放置在主要杂波源方向。当目标 AoA 接近杂波子空间时,式 (86) 中的分母变小,组合器变得对导向矢量失配和校准误差敏感(steering vector mismatch and calibration errors)。在这种情况下,仅靠空域抑制可能无法提供足够的目标辨别力,需要额外的处理维度。
-
子空间投影:当未明确知道杂波 AoA 时,或者当杂波占据扩展的角区域时,估计杂波子空间更为有效 [75]。给定子载波 n n n 的协方差估计 R ^ I , n ∈ C N r × N r \widehat{\mathbf{R}}_{I,n} \in \mathbb{C}^{N_r \times N_r} R I,n∈CNr×Nr 的主特征向量 U c , n ∈ C N r × r c , n \mathbf{U}_{c,n} \in \mathbb{C}^{N_r \times r_{c,n}} Uc,n∈CNr×rc,n ,相应的正交投影矩阵可以写为
P ⊥ , n = I N r − U c , n U c , n H . (87) \mathbf{P}_{\perp, n} = \mathbf{I}_{N_r} - \mathbf{U}_{c,n} \mathbf{U}_{c,n}^H. \tag{87} P⊥,n=INr−Uc,nUc,nH.(87)
所得的子空间投影组合器与式 (86) 采用相同的形式。与确定性置零相比,子空间投影的性能取决于选择适当的杂波子空间维度 r c , n r_{c,n} rc,n 。高估 r c , n r_{c,n} rc,n 会增加目标自相消的风险,而低估 r c , n r_{c,n} rc,n 则会增加残余杂波。在实践中,如第 IV-C 节所述,可以使用特征值阈值、能量捕获率或信息论准则(如 MDL 或 AIC)来确定 r c , n r_{c,n} rc,n 。 -
协方差自适应波束赋形(Covariance-Adaptive Beamforming):协方差自适应空间波束赋形直接结合了 R ^ I , n \widehat{\mathbf{R}}_{I,n} R I,n ,并且当协方差估计准确且训练数据局部均匀时(the training data are locally homogeneous),可以实现接近最优的输出 SCNR(achieve near-optimal output SCNR)
MVDR 组合器是通过在受到针对 θ t \theta_t θt 的无失真约束条件下最小化输出干扰功率来获得的
u MVDR , n = R ^ I , n − 1 b n ( θ t ) b n H ( θ t ) R ^ I , n − 1 b n ( θ t ) . (88) \mathbf{u}_{\text{MVDR},n} = \frac{\widehat{\mathbf{R}}_{I,n}^{-1} \mathbf{b}_n(\theta_t)}{\mathbf{b}_n^H(\theta_t) \widehat{\mathbf{R}}_{I,n}^{-1} \mathbf{b}_n(\theta_t)}. \tag{88} uMVDR,n=bnH(θt)R I,n−1bn(θt)R I,n−1bn(θt).(88)
线性约束最小方差(linearly constrained minimum variance,LCMV)波束赋形器通过允许多个线性约束来保护目标或通信信号,从而推广了 MVDR [76]
u LCMV , n = R ^ I , n − 1 C n ( C n H R ^ I , n − 1 C n ) − 1 f (89) \mathbf{u}_{\text{LCMV},n} = \widehat{\mathbf{R}}_{I,n}^{-1} \mathbf{C}_n \left( \mathbf{C}_n^H \widehat{\mathbf{R}}_{I,n}^{-1} \mathbf{C}_n \right)^{-1} \mathbf{f} \tag{89} uLCMV,n=R I,n−1Cn(CnHR I,n−1Cn)−1f(89)
其中 C n \mathbf{C}_n Cn 收集了应约束其响应的导向矢量, f \mathbf{f} f 指定了期望的增益,例如,对于期望方向和干扰,分别等于 1 或 0。
式 (88) 中的 MVDR 组合器可以作为式 (89) 的特例恢复,其中针对目标方向 θ t \theta_t θt 取 C n = b n ( θ t ) \mathbf{C}_n = \mathbf{b}_n(\theta_t) Cn=bn(θt) 且 f = 1 \mathbf{f} = 1 f=1 。在快拍数受限的设置中,MVDR 和 LCMV 的鲁棒性可以通过第 IV 节中的正则化和结构化协方差估计器得到显著改善。
算法的核心目标是在满足特定方向增益约束的前提下,最小化阵列输出的总干扰与噪声功率。设波束赋形权重向量为 u \mathbf{u} u ,阵列输出的干扰和噪声的平均总功率(方差)表示为:
P out = E [ u H y y H u ] = u H R ^ I , n u P_{\text{out}} = \mathbb{E}[\mathbf{u}^H \mathbf{y} \mathbf{y}^H \mathbf{u}] = \mathbf{u}^H \widehat{\mathbf{R}}_{I,n} \mathbf{u} Pout=E[uHyyHu]=uHR I,nu
其中, R ^ I , n \widehat{\mathbf{R}}_{I,n} R I,n 为干扰协方差矩阵。
MVDR(最小方差无失真响应)
核心思想: 最小化输出总功率,同时强制目标方向 θ t \theta_t θt 的增益恒为 1(无失真约束),迫使算法在干扰方向形成零点。
数学优化模型:
min u u H R ^ I , n u s.t. u H b n ( θ t ) = 1 \min_{\mathbf{u}} \mathbf{u}^H \widehat{\mathbf{R}}_{I,n} \mathbf{u} \quad \text{s.t.} \quad \mathbf{u}^H \mathbf{b}_n(\theta_t) = 1 uminuHR I,nus.t.uHbn(θt)=1
最优解: 通过拉格朗日乘数法求解该等式约束极值问题,可得 MVDR 最优权重:
u MVDR , n = R ^ I , n − 1 b n ( θ t ) b n H ( θ t ) R ^ I , n − 1 b n ( θ t ) (88) \mathbf{u}_{\text{MVDR},n} = \frac{\widehat{\mathbf{R}}_{I,n}^{-1} \mathbf{b}_n(\theta_t)}{\mathbf{b}_n^H(\theta_t) \widehat{\mathbf{R}}_{I,n}^{-1} \mathbf{b}_n(\theta_t)} \tag{88} uMVDR,n=bnH(θt)R I,n−1bn(θt)R I,n−1bn(θt)(88)
注:分子利用协方差矩阵的逆来抑制干扰,分母为标量,用于保证目标增益的归一化。LCMV(线性约束最小方差)
核心思想: MVDR 的多约束推广版本。允许同时设置多个线性约束(例如:保持目标方向增益为 1,同时强制某干扰方向增益为 0)。
数学优化模型:
min u u H R ^ I , n u s.t. C n H u = f \min_{\mathbf{u}} \mathbf{u}^H \widehat{\mathbf{R}}_{I,n} \mathbf{u} \quad \text{s.t.} \quad \mathbf{C}_n^H \mathbf{u} = \mathbf{f} uminuHR I,nus.t.CnHu=f
- C n \mathbf{C}_n Cn:约束矩阵(列向量为需要约束方向的导向矢量)。
- f \mathbf{f} f:期望增益向量(指定各方向的目标增益值)。
最优解: 同样利用拉格朗日乘数法求解,得到 LCMV 最优权重:
u LCMV , n = R ^ I , n − 1 C n ( C n H R ^ I , n − 1 C n ) − 1 f (89) \mathbf{u}_{\text{LCMV},n} = \widehat{\mathbf{R}}_{I,n}^{-1} \mathbf{C}_n \left( \mathbf{C}_n^H \widehat{\mathbf{R}}_{I,n}^{-1} \mathbf{C}_n \right)^{-1} \mathbf{f} \tag{89} uLCMV,n=R I,n−1Cn(CnHR I,n−1Cn)−1f(89)
注:当 C n = b n ( θ t ) \mathbf{C}_n = \mathbf{b}_n(\theta_t) Cn=bn(θt) 且 f = 1 \mathbf{f} = 1 f=1 时,LCMV 退化为 MVDR。
C. Space–Time Adaptive Processing
STAP 通过联合利用可用的空间和慢时间自由度(DoFs)来抑制杂波 [77]。在 MIMO-OFDM ISAC 中,STAP 对每个子载波 n n n 处的式 (17) 中的堆叠快拍 y n ∈ C N r L \mathbf{y}_n \in \mathbb{C}^{N_r L} yn∈CNrL 或式 (20) 中的全频带堆叠快拍 y ∈ C N r N L \mathbf{y} \in \mathbb{C}^{N_r N L} y∈CNrNL 进行操作。它对来自接收阵列在多个 OFDM 符号上收集的测量值进行相干处理。
这种联合处理对于具有耦合角度-多普勒结构的杂波非常有效,因为这类杂波很难仅使用角度或多普勒抑制来减轻。当平台运动或移动的散射体引起多普勒扩展的杂波时,杂波跨越较宽的角度扇区并在 1-D 处理后留下明显的残余旁瓣时,或者当热杂波占据角度-多普勒平面中的广阔区域时,STAP 尤其有用。这些增益伴随着计算复杂度和样本复杂度的增加,因为 STAP 依赖于估计并求逆一个巨大的 N r L × N r L N_r L \times N_r L NrL×NrL 或 N r N L × N r N L N_r N L \times N_r N L NrNL×NrNL 干扰协方差矩阵,这通常需要降低复杂度和结构化的公式。我们
- 首先回顾经典的 MVDR-STAP,
- 讨论宽带 SFTAP 扩展,
- 提出降低复杂度和结构化的 STAP 变体,
- 最后转向双基地和多基地的推广。
在本节中, R I , n ≜ E { y n y n H } ∈ C N r L × N r L \mathbf{R}_{I,n} \triangleq \mathbb{E}\{\mathbf{y}_n \mathbf{y}_n^H\} \in \mathbb{C}^{N_r L \times N_r L} RI,n≜E{ynynH}∈CNrL×NrL 表示与式 (17) 中堆叠快拍 y n \mathbf{y}_n yn 相关的空时协方差,而 R I ∈ C N r N L × N r N L \mathbf{R}_I \in \mathbb{C}^{N_r N L \times N_r N L} RI∈CNrNL×NrNL 对应于式 (20) 中的全频带堆叠快拍 y \mathbf{y} y 。
- 经典 STAP:经典的窄带 STAP 方法使用每个子载波的堆叠快拍 y n \mathbf{y}_n yn 为每个假设的角度-多普勒单元 ( θ , f D ) (\theta, f_D) (θ,fD) 设计一个空时自适应滤波器。回想一下,堆叠的空时快拍 y n ∈ C N r L \mathbf{y}_n \in \mathbb{C}^{N_r L} yn∈CNrL 采用以下形式
y n = ∑ q ∈ Q γ q , n e − j 2 π n Δ f τ q X n v n ( θ q , f D , q ) + η n (90) \mathbf{y}_n = \sum_{q \in \mathcal{Q}} \gamma_{q,n} e^{-j2\pi n \Delta f \tau_q} \mathbf{X}_n \mathbf{v}_n(\theta_q, f_{D,q}) + \boldsymbol{\eta}_n \tag{90} yn=q∈Q∑γq,ne−j2πnΔfτqXnvn(θq,fD,q)+ηn(90)
其中 X n \mathbf{X}_n Xn 是根据式 (16) 由发射信号 { x n [ ℓ ] } ℓ = 0 L − 1 \{\mathbf{x}_n[\ell]\}_{\ell=0}^{L-1} {xn[ℓ]}ℓ=0L−1 构造的, v n ( θ , f D ) \mathbf{v}_n(\theta, f_D) vn(θ,fD) 是式 (19) 中定义的空时导向矢量,而 η n \boldsymbol{\eta}_n ηn 是总干扰。对于 ISAC-STAP 设计,定义有效的依赖于波形的空时导向矢量是很方便的
v ~ n ( θ , f D ) ≜ X n v n ( θ , f D ) ∈ C N r L . (91) \tilde{\mathbf{v}}_n(\theta, f_D) \triangleq \mathbf{X}_n \mathbf{v}_n(\theta, f_D) \in \mathbb{C}^{N_r L}. \tag{91} v~n(θ,fD)≜Xnvn(θ,fD)∈CNrL.(91)
针对单元 ( θ , f D ) (\theta, f_D) (θ,fD) 的 STAP 权重是从标准的 MVDR 问题中获得的
min w n w n H R ^ I , n w n s.t. w n H v ~ n ( θ , f D ) = 1 (92) \begin{aligned} \min_{\mathbf{w}_n} \quad & \mathbf{w}_n^H \widehat{\mathbf{R}}_{I,n} \mathbf{w}_n \\ \text{s.t.} \quad & \mathbf{w}_n^H \tilde{\mathbf{v}}_n(\theta, f_D) = 1 \end{aligned} \tag{92} wnmins.t.wnHR I,nwnwnHv~n(θ,fD)=1(92)
其中 R ^ I , n ∈ C N r L × N r L \widehat{\mathbf{R}}_{I,n} \in \mathbb{C}^{N_r L \times N_r L} R I,n∈CNrL×NrL 是空时干扰加噪声协方差估计值。式 (92) 的解是归一化的 MVDR 形式
w MVDR , n = R ^ I , n − 1 v ~ n ( θ , f D ) v ~ n H ( θ , f D ) R ^ I , n − 1 v ~ n ( θ , f D ) . (93) \mathbf{w}_{\text{MVDR},n} = \frac{\widehat{\mathbf{R}}_{I,n}^{-1} \tilde{\mathbf{v}}_n(\theta, f_D)}{\tilde{\mathbf{v}}_n^H(\theta, f_D) \widehat{\mathbf{R}}_{I,n}^{-1} \tilde{\mathbf{v}}_n(\theta, f_D)}. \tag{93} wMVDR,n=v~nH(θ,fD)R I,n−1v~n(θ,fD)R I,n−1v~n(θ,fD).(93)
将 v ~ n ( θ , f D ) = X n v n ( θ , f D ) \tilde{\mathbf{v}}_n(\theta, f_D) = \mathbf{X}_n \mathbf{v}_n(\theta, f_D) v~n(θ,fD)=Xnvn(θ,fD) 代入,得到一个显式的依赖于波形的表达式
w MVDR , n = R ^ I , n − 1 X n v n ( θ , f D ) v n H ( θ , f D ) X n H R ^ I , n − 1 X n v n ( θ , f D ) . (94) \mathbf{w}_{\text{MVDR},n} = \frac{\widehat{\mathbf{R}}_{I,n}^{-1} \mathbf{X}_n \mathbf{v}_n(\theta, f_D)}{\mathbf{v}_n^H(\theta, f_D) \mathbf{X}_n^H \widehat{\mathbf{R}}_{I,n}^{-1} \mathbf{X}_n \mathbf{v}_n(\theta, f_D)}. \tag{94} wMVDR,n=vnH(θ,fD)XnHR I,n−1Xnvn(θ,fD)R I,n−1Xnvn(θ,fD).(94)
单位功率目标对应的输出 SCNR 为
SCNR n = v n H ( θ , f D ) X n H R ^ I , n − 1 X n v n ( θ , f D ) . (95) \text{SCNR}_n = \mathbf{v}_n^H(\theta, f_D) \mathbf{X}_n^H \widehat{\mathbf{R}}_{I,n}^{-1} \mathbf{X}_n \mathbf{v}_n(\theta, f_D). \tag{95} SCNRn=vnH(θ,fD)XnHR I,n−1Xnvn(θ,fD).(95)
请注意, R ^ I , n \widehat{\mathbf{R}}_{I,n} R I,n 和 w MVDR , n ( θ , f D ) \mathbf{w}_{\text{MVDR},n}(\theta, f_D) wMVDR,n(θ,fD) 都通过 X n \mathbf{X}_n Xn 依赖于发射波形。因此,有效的杂波抑制不仅是接收端的问题。联合收发优化可以塑造照射方向图并减少波形引起的杂波旁瓣。我们将在第六节 B 部分进一步探讨这种主动优化的视角。
当干扰统计特性在 CPI 内是平稳的,并且有足够的同质训练数据可用于可靠的协方差估计时(sufficient homogeneous training data are available for reliable covariance estimation),经典 STAP 可实现接近最优的抑制效果。其实际部署受到求逆 N r L N_r L NrL 维矩阵的三次方复杂度,以及稳定估计 R I , n \mathbf{R}_{I,n} RI,n 所需的样本支持量的限制。由于波束斜视和频率选择性杂波会引起依赖于频率的导向矢量和协方差矩阵,因此经典窄带处理在宽带场景中也会变得不匹配。在 OFDM 系统中,这种频率依赖性需要特定于子载波的 STAP 滤波器。然而,当对独立处理的子载波结果进行组合以实现时延/距离聚焦时,由每个子载波自适应引起的残余失配会降低相干积累性能(residual mismatches arising from per-subcarrier adaptation can degrade coherent integration performance)。这些局限性推动了 SFTAP 的发展。
- 空频时自适应处理:SFTAP 通过在空间、慢时间和频率维度上进行联合自适应来扩展经典的 STAP。这种扩展通过考虑依赖于频率的阵列响应,并显式地结合跨子载波的延迟结构,从而解决了宽带效应。基于信号模型
y = ∑ q ∈ Q Γ q T ( τ q ) X v ( θ q , f D , q ) + η \mathbf{y} = \sum_{q \in \mathcal{Q}} \boldsymbol{\Gamma}_q \mathbf{T}(\tau_q) \mathbf{X} \mathbf{v}(\theta_q, f_{D,q}) + \boldsymbol{\eta} y=q∈Q∑ΓqT(τq)Xv(θq,fD,q)+η ,以及一种常见的简化(即依赖于频率的反射率项 Γ q \boldsymbol{\Gamma}_q Γq 在处理的频带/子带上可以被近似视为平坦的),在 ( θ , f D , τ ) (\theta, f_D, \tau) (θ,fD,τ) 处的假设散射体的响应正比于
v ~ ( θ , f D , τ ) ≜ T ( τ ) X v ( θ , f D ) (96) \widetilde{\mathbf{v}}(\theta, f_D, \tau) \triangleq \mathbf{T}(\tau) \mathbf{X} \mathbf{v}(\theta, f_D) \tag{96} v (θ,fD,τ)≜T(τ)Xv(θ,fD)(96)
其中 (22) 中定义的 T ( τ ) \mathbf{T}(\tau) T(τ) 捕获了频率-延迟相位级数, (21) 中的 X \mathbf{X} X 是全频带波形矩阵,而 (24) 中的 v ( θ , f D ) \mathbf{v}(\theta, f_D) v(θ,fD) 是全频带角度-多普勒导向矢量。如果 R ^ I ∈ C N r N L × N r N L \widehat{\mathbf{R}}_I \in \mathbb{C}^{N_r N L \times N_r N L} R I∈CNrNL×NrNL 是全维干扰加噪声协方差的估计值,则 MVDR-SFTAP 滤波器为
w SFTAP = R ^ I − 1 v ~ ( θ , f D , τ ) v ~ H ( θ , f D , τ ) R ^ I − 1 v ~ ( θ , f D , τ ) = R ^ I − 1 T ( τ ) X v ( θ , f D ) v H ( θ , f D ) X H T H ( τ ) R ^ I − 1 T ( τ ) X v ( θ , f D ) . (97) \mathbf{w}_{\text{SFTAP}} = \frac{\widehat{\mathbf{R}}_I^{-1} \widetilde{\mathbf{v}}(\theta, f_D, \tau)}{\widetilde{\mathbf{v}}^H(\theta, f_D, \tau) \widehat{\mathbf{R}}_I^{-1} \widetilde{\mathbf{v}}(\theta, f_D, \tau)} = \frac{\widehat{\mathbf{R}}_I^{-1} \mathbf{T}(\tau) \mathbf{X} \mathbf{v}(\theta, f_D)}{\mathbf{v}^H(\theta, f_D) \mathbf{X}^H \mathbf{T}^H(\tau) \widehat{\mathbf{R}}_I^{-1} \mathbf{T}(\tau) \mathbf{X} \mathbf{v}(\theta, f_D)}. \tag{97} wSFTAP=v H(θ,fD,τ)R I−1v (θ,fD,τ)R I−1v (θ,fD,τ)=vH(θ,fD)XHTH(τ)R I−1T(τ)Xv(θ,fD)R I−1T(τ)Xv(θ,fD).(97)
SFTAP 自然地契合基于 OFDM 的 ISAC 架构,因为它在信号带宽内保留了依赖于频率的杂波结构,同时在慢时间上保持了相干处理。其主要的局限性在于计算和统计的可扩展性。矩阵求逆现在的维度是 N r N L N_r N L NrNL ,直接的矩阵求逆会导致 O { ( N r N L ) 3 } \mathcal{O}\{(N_r N L)^3\} O{(NrNL)3} 阶的复杂度。此外,扩大的协方差矩阵更难从有限的训练数据中进行鲁棒的估计。这些挑战推动了降低复杂度和结构化的 STAP 变体的发展,我们将在接下来进行讨论。
- 降低复杂度的 STAP 方法:降低复杂度的 STAP 变体旨在保留全维 MVDR 滤波的大部分干扰抑制能力,同时降低高维协方差求逆的成本以及可靠协方差估计所需的训练数据量。在宽带 OFDM 设置中,这些思想也可以与子带处理相结合,从而使自适应维度随局部相干带宽成比例缩放。我们简要总结三种代表性的方法。
- a) 降维 (Reduced-dimension,ReD)-STAP:ReD-STAP 通过将 N r L N_rL NrL 维空时快拍投影到较低维的子空间来降低计算负荷。该子空间通常在波束空间、多普勒域中定义,或者利用预计存在杂波和目标的角度-多普勒区域的先验知识来定义。令 T RD ∈ C N r L × d \mathbf{T}_{\text{RD}} \in \mathbb{C}^{N_rL \times d} TRD∈CNrL×d 表示一个基矩阵,其中 d ≪ N r L d \ll N_rL d≪NrL 。将子载波 n n n 处的协方差、导向矢量和滤波器权重投影到该基上,得到
w RD , n = T RD ( T RD H R ^ I , n T RD ) − 1 T RD H X n v n ( θ , f D ) v n H ( θ , f D ) X n H T RD ( T RD H R ^ I , n T RD ) − 1 T RD H X n v n ( θ , f D ) (98) \mathbf{w}_{\text{RD},n} = \frac{\mathbf{T}_{\text{RD}} \left( \mathbf{T}_{\text{RD}}^H \widehat{\mathbf{R}}_{I,n} \mathbf{T}_{\text{RD}} \right)^{-1} \mathbf{T}_{\text{RD}}^H \mathbf{X}_n \mathbf{v}_n(\theta, f_D)}{\mathbf{v}_n^H(\theta, f_D) \mathbf{X}_n^H \mathbf{T}_{\text{RD}} \left( \mathbf{T}_{\text{RD}}^H \widehat{\mathbf{R}}_{I,n} \mathbf{T}_{\text{RD}} \right)^{-1} \mathbf{T}_{\text{RD}}^H \mathbf{X}_n \mathbf{v}_n(\theta, f_D)} \tag{98} wRD,n=vnH(θ,fD)XnHTRD(TRDHR I,nTRD)−1TRDHXnvn(θ,fD)TRD(TRDHR I,nTRD)−1TRDHXnvn(θ,fD)(98)
这将问题维度从 N r L N_rL NrL 降低到 d d d 。基 T RD \mathbf{T}_{\text{RD}} TRD 可以由参数化模型(如 STAR [62])构成,或者利用杂波脊和目标搜索区域的先验知识来构造。
- b) 降秩 (Reduced-rank,RR)-STAP 方法:RR-STAP 与 ReD-STAP 类似,但它利用干扰协方差的特征结构,并且仅在 R ^ I , n \widehat{\mathbf{R}}_{I,n} R
I,n 的主导低秩子空间内进行自适应。一种常见的方法是基于以下近似的主成分 STAP
R ^ I , n ≈ U r Λ r U r H (99) \widehat{\mathbf{R}}_{I,n} \approx \mathbf{U}_r \boldsymbol{\Lambda}_r \mathbf{U}_r^H \tag{99} R I,n≈UrΛrUrH(99)
其中 U r ∈ C N r L × r \mathbf{U}_r \in \mathbb{C}^{N_rL \times r} Ur∈CNrL×r 包含 r r r 个主导特征向量, Λ r ∈ C r × r \boldsymbol{\Lambda}_r \in \mathbb{C}^{r \times r} Λr∈Cr×r 是对应的特征值。相关的权重向量则为
w RR , n = U r Λ r − 1 U r H X n v n ( θ , f D ) v n H ( θ , f D ) X n H U r Λ r − 1 U r H X n v n ( θ , f D ) . (100) \mathbf{w}_{\text{RR},n} = \frac{\mathbf{U}_r \boldsymbol{\Lambda}_r^{-1} \mathbf{U}_r^H \mathbf{X}_n \mathbf{v}_n(\theta, f_D)}{\mathbf{v}_n^H(\theta, f_D) \mathbf{X}_n^H \mathbf{U}_r \boldsymbol{\Lambda}_r^{-1} \mathbf{U}_r^H \mathbf{X}_n \mathbf{v}_n(\theta, f_D)}. \tag{100} wRR,n=vnH(θ,fD)XnHUrΛr−1UrHXnvn(θ,fD)UrΛr−1UrHXnvn(θ,fD).(100)
当所选子空间捕获了有效杂波,同时主要留下白噪声时,ReD-STAP 和 RR-STAP 可以接近满秩 STAP 的性能。在实践中,当 N r L N_rL NrL 很大时,选择 r r r 和高效计算主导特征向量是主要的实现问题。
- c) 结构化 STAP(Structured STAP):在这种方法中,强加了协方差的结构化模型以减少估计方差和计算成本。一个例子是假设空间和慢时间维度之间近似可分,这产生了克罗内克(Kronecker)模型
R ^ I , n ≈ R ^ t , n ⊗ R ^ s , n (101) \widehat{\mathbf{R}}_{I,n} \approx \widehat{\mathbf{R}}_{\text{t},n} \otimes \widehat{\mathbf{R}}_{\text{s},n} \tag{101} R I,n≈R t,n⊗R s,n(101)
其中 R ^ s , n ∈ C N r × N r \widehat{\mathbf{R}}_{\text{s},n} \in \mathbb{C}^{N_r \times N_r} R
s,n∈CNr×Nr 和 R ^ t , n ∈ C L × L \widehat{\mathbf{R}}_{\text{t},n} \in \mathbb{C}^{L \times L} R
t,n∈CL×L 表示空间和慢时间协方差。当波形感知导向矢量也是可分的时,MVDR 解可以分解为两个较低维 MVDR 滤波器的克罗内克积 w struct , n = R ^ t , n − 1 t n ( θ , f D ) t n H ( θ , f D ) R ^ t , n − 1 t n ( θ , f D ) ⊗ R ^ s , n − 1 b n ( θ ) b n H ( θ ) R ^ s , n − 1 b n ( θ ) (102) \mathbf{w}_{\text{struct},n} = \frac{\widehat{\mathbf{R}}_{\text{t},n}^{-1} \mathbf{t}_n(\theta, f_D)}{\mathbf{t}_n^H(\theta, f_D) \widehat{\mathbf{R}}_{\text{t},n}^{-1} \mathbf{t}_n(\theta, f_D)} \otimes \frac{\widehat{\mathbf{R}}_{\text{s},n}^{-1} \mathbf{b}_n(\theta)}{\mathbf{b}_n^H(\theta) \widehat{\mathbf{R}}_{\text{s},n}^{-1} \mathbf{b}_n(\theta)} \tag{102} wstruct,n=tnH(θ,fD)R
t,n−1tn(θ,fD)R
t,n−1tn(θ,fD)⊗bnH(θ)R
s,n−1bn(θ)R
s,n−1bn(θ)(102)
其中 t n ( θ , f D ) = [ a n H ( θ ) x n [ 0 ] , … , a n H ( θ ) x n [ L − 1 ] ] T ⊙ d ( f D ) \mathbf{t}_n(\theta, f_D) = [\mathbf{a}_n^H(\theta)\mathbf{x}_n[0], \dots, \mathbf{a}_n^H(\theta)\mathbf{x}_n[L-1]]^T \odot \mathbf{d}(f_D) tn(θ,fD)=[anH(θ)xn[0],…,anH(θ)xn[L−1]]T⊙d(fD) ,并且 X n v n ( θ , f D ) = t n ( θ , f D ) ⊗ b n ( θ ) \mathbf{X}_n \mathbf{v}_n(\theta, f_D) = \mathbf{t}_n(\theta, f_D) \otimes \mathbf{b}_n(\theta) Xnvn(θ,fD)=tn(θ,fD)⊗bn(θ) 。这种克罗内克结构将矩阵求逆的计算量从 O { ( N r L ) 3 } \mathcal{O}\{(N_rL)^3\} O{(NrL)3} 降低到 O { N r 3 + L 3 } \mathcal{O}\{N_r^3 + L^3\} O{Nr3+L3} ,并在有限的训练数据下提高了数值稳定性。然而,强烈的空时耦合、异构杂波或快速动态变化可能会破坏该模型并降低抑制性能。
-
向双基地/多基地 STAP 的扩展:式 (94) 中的 STAP 公式是波形感知的,因为有效的空时导向矢量采用以下形式 v ~ n = X n v n ( ⋅ ) \widetilde{\mathbf{v}}_n = \mathbf{X}_n \mathbf{v}_n(\cdot) v n=Xnvn(⋅) ,并且通过式 (16) 中的 X n \mathbf{X}_n Xn 依赖于瞬时探测符号 { x n [ ℓ ] } ℓ = 0 L − 1 \{\mathbf{x}_n[\ell]\}_{\ell=0}^{L-1} {xn[ℓ]}ℓ=0L−1 。在双基地和多基地传感中,STAP 的可行性很大程度上取决于传感接收器是否能获取此类符号级波形信息。根据注 3,我们根据此类信息的可用性考虑两种情况。
- a)当接收端能够获取传感波形时,通过将单基地空时导向矢量替换为其双基地对应物,即可实现式 (94) 和式 (95) 的扩展。关于波形的知识可能来自共享 { x n [ ℓ ] } \{\mathbf{x}_n[\ell]\} {xn[ℓ]} 的合作发射机,或者来自支持波形重建的参考链路。在发射和接收阵列不共址的情况下,空时导向矢量必须考虑不同的发射离开角(AoDs)和接收到达角(AoAs)。对于子载波 n n n ,定义双基地导向矢量为
v n bi ( θ T , θ R , f D ) ≜ d ( f D ) ⊗ b n ( θ R ) ⊗ a n ∗ ( θ T ) (103) \mathbf{v}_n^{\text{bi}}(\theta_{\text{T}}, \theta_{\text{R}}, f_D) \triangleq \mathbf{d}(f_D) \otimes \mathbf{b}_n(\theta_{\text{R}}) \otimes \mathbf{a}_n^*(\theta_{\text{T}}) \tag{103} vnbi(θT,θR,fD)≜d(fD)⊗bn(θR)⊗an∗(θT)(103)其中 θ T \theta_{\text{T}} θT 和 θ R \theta_{\text{R}} θR 分别表示发射 AoD 和接收 AoA。将式 (94) 和式 (95) 中的导向矢量替换为 v n bi ( θ T , θ R , f D ) \mathbf{v}_n^{\text{bi}}(\theta_{\text{T}}, \theta_{\text{R}}, f_D) vnbi(θT,θR,fD) ,即可得到相应的波形感知的双基地/多基地 STAP 权重和 SCNR。
- a)当接收端能够获取传感波形时,通过将单基地空时导向矢量替换为其双基地对应物,即可实现式 (94) 和式 (95) 的扩展。关于波形的知识可能来自共享 { x n [ ℓ ] } \{\mathbf{x}_n[\ell]\} {xn[ℓ]} 的合作发射机,或者来自支持波形重建的参考链路。在发射和接收阵列不共址的情况下,空时导向矢量必须考虑不同的发射离开角(AoDs)和接收到达角(AoAs)。对于子载波 n n n ,定义双基地导向矢量为
D. KA Methods and Machine Learning
尽管前面讨论的时域、空域和空时杂波抑制方法很有效,但实际的 ISAC 场景可能需要更复杂的处理策略。传统方法严重依赖于均匀快拍(homogeneous snapshots)和稳态杂波假设,这在真实的动态环境中可能不成立。为了解决这些局限性,出现了基于知识辅助(KA)和机器学习的方法。这些“智能”方法利用外部先验知识或数据,在可用数据有限且对杂波条件了解不精确的情况下,提高杂波抑制性能。
-
KA方法:KA 方法通过利用外部可用的先验环境信息 [78] 来改进自适应处理,例如从数字高程模型(DEMs)、建筑轮廓、道路网络和/或通信信道统计中提取的几何信息。其核心思想是将已知或学到的环境特征转化为干扰建模、协方差估计和自适应滤波的先验信息,从而减少对大量均匀辅助数据集的依赖,并提高在杂波异质性和非平稳性下的鲁棒性。
近期研究的一个共同主题是,首先构建一个由可用先验知识指导的杂波表示,然后将其合并到传感接收器中。一个具有代表性的方向集中在结构和子空间信息上。先验知识约束了杂波能量预计集中的区域,从而降低了有效的自适应维度。这一观点与降维和 RR-STAP 密切相关,在后者中,投影基由杂波支撑集引导,以便自适应自由度(DoFs)用于相关的干扰区域。
在 ISAC 系统中,信道知识图谱(channel knowledge maps)提供了一种实用的机制来存储离线学习到的与位置相关的杂波特征 [17], [73], [79]。存储的信息可能包括主要的散射角和延迟-多普勒特征。在在线运行期间,接收器可以使用这些先验信息执行空间投影或迫零(ZF),以便在参数估计之前抑制已知的杂波方向。这种地图辅助的预置零对于低速或准静止目标特别有用,因为基于多普勒的抑制在该区域中可能是无效的,并且可能会将期望的回波与低多普勒杂波一起抑制。
另一个方向强调统计和协方差信息(statistical and covariance information)。先验知识用于通过收缩、结构化建模和加载策略来正则化协方差估计。一个典型的公式将样本协方差与预测的或历史的协方差模型结合起来,表示为 R ^ I = α R ^ s + ( 1 − α ) R prior \widehat{\mathbf{R}}_I = \alpha \widehat{\mathbf{R}}_{\text{s}} + (1 - \alpha)\mathbf{R}_{\text{prior}} R I=αR s+(1−α)Rprior 。这些技术改善了数值条件,并在小样本区域和异构训练下稳定了自适应滤波器。在宽带 MIMO-OFDM ISAC 中,先验信息还可以反映波形引起的统计特性和依赖于频率的阵列响应,当诸如波束斜视等影响不可忽略时,这一点非常重要。KA 顺序角度-距离处理检测器提供了一个例子,其中利用先验干扰协方差来构建滤波器,从而在实际宽带条件下逼近 SINR 最优性能 [80]。
先验知识也可以贯穿整个处理链被结合进去。在这种情况下,环境信息指导影响后续杂波抑制的上游操作(guides upstream operations)。
- 例如时频同步、传感参数关联和假设管理。在异步感知车载网络中,稳定的杂波回波可以作为特定环境的指纹来支持同步和关联,从而实现更连贯的处理并改善杂波减轻 [65]。
- 此外,从信道知识图谱得出的先验信息可以提供有关多径几何形状的信息,并可以减少非视距(NLoS)传感中的模糊性。这是通过缩小可行的假设空间并将目标相关的回波与多径引起的伪影分离开来实现的 [79]。
KA 方法为鲁棒的杂波抑制提供了一条物理上可解释且模块化的途径。它们通过结合地图和几何驱动的约束、先验正则化协方差学习以及知识引导的接收器处理,对纯粹数据驱动的自适应进行了补充。这些优势在异构 ISAC 环境(包括双基地和多基地部署以及宽带操作)中变得更加明显,在这些环境中,杂波统计特性随位置、波形和网络配置而变化。 -
机器学习方法:机器学习(ML)为杂波感知的 ISAC 中的 KA 处理提供了一条补充途径,特别是当杂波统计特性是异质的、非平稳的,或难以用参数化模型捕捉时。超越纯粹的数据驱动自适应,模型驱动学习通过将基于物理和模型的杂波结构嵌入到可训练网络中(by embedding physics and model-based clutter structure into trainable networks),在优化和学习之间架起了一座实用的桥梁,从而实现了更可靠的性能并降低了计算复杂度 [81]。
最近的进展表明,ML 还可以增强贯穿整个处理链的杂波感知 ISAC。
- 在协作和无小区部署中,基于学习的表示和学习到的先验信息可以捕获网络耦合干扰,并实现可扩展的、几何自适应的融合/推理,因为杂波统计特性随环境和网络配置而变化 [82]。
- 在接收端,学习的去噪或干扰感知滤波可以抑制杂波和残余 SI,随后是端到端估计/跟踪网络,该网络直接从通信波形推断传感状态,从而减少对人工设计模型的依赖 [83]。
- 在发射端,强化学习和策略优化可以进一步支持在线波形/波束控制,主动避开杂波主导的散射体,自然地将接收端的抑制与发射端的自适应以及传感-通信的权衡结合起来 [84], [85]。
将可解释的先验与学习到的组件相结合的混合 KA 和 ML 设计,对于不同类型部署的泛化特别有前途。
VII. Future Direction
A. Robust Clutter Handling in Dynamic Environments
高动态杂波对 ISAC 接收机提出了挑战,因为干扰统计特性可能在 CPI 内和跨 CPI 发生漂移,直接破坏了协方差估计和自适应滤波。经典的跟踪算法(如卡尔曼滤波)在杂波演变能被低阶状态空间模型很好地捕捉时是有效的,但当面临突发的状态改变、多机制动态以及异构或有限的辅助数据时,其性能会显著下降。一个关键的研究方向是开发鲁棒的在线处理方法,使其能够在快拍数有限的情况下跟踪杂波统计特性,同时在分布偏移和模型失配下保持稳定。
在这个方向上,一个很有前景的方法是将基于模型的估计器(couple model-based estimators)与学习组件(learned components)相结合,这些学习组件用于辅助自适应,而不是完全取代物理建模。例如,
-
神经序列模型可以预测或正则化协方差参数的演变,从而实现快速更新并降低对非平稳条件的敏感度。
-
在各种雷达和 ISAC 数据集上训练的基础模型,可以进一步为杂波结构提供可迁移的先验信息,并有助于识别反复出现的依赖于场景的模式 [123]。
要实现这些性能增益,需要用于实时推理的轻量级架构(lightweight architectures for real-time inference)、在标签有限的情况下的数据高效训练方法(data-efficient training and adaptation under limited labels),以及能够验证异构环境性能的评估体系。
此外,
- 自监督自适应可以在无标签的情况下实现持续的优化,
- 物理信息学习(physics-informed learning)可以施加多普勒和几何一致性约束以提高样本效率和可解释性(impose Doppler and geometry consistency),
- 而预测性数字孪生(predictive digital twins)可以提供杂波演变的短期预测(short-horizon forecasts of clutter evolution),以支持主动的跟踪和滤波。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐



 4
4 0
0- 0



 已为社区贡献9条内容
已为社区贡献9条内容

所有评论(0)