AI Mission Cloud 分层架构:多模态 AI 推理的控制平面 + 编排平面 + 模型注册中心
AI Mission Cloud 分层架构:多模态 AI 推理的控制平面 + 编排平面 + 模型注册中心

多模态 AI 推理与任务编排的通用基础设施(Mission AI OS)
-
✅ 应该做 “可插拔 AI 推理框架 + 任务级 AI 能力抽象”
-
✅ 把 YOLO / CLIP / VLM / VLA 视为“算子 / 能力模块”
AI Mission Cloud =
多模态 AI 推理的控制平面 + 编排平面 + 模型注册中心
-
端侧 AI 的“大脑协调者”
-
云端 AI 的“认知与任务规划层”
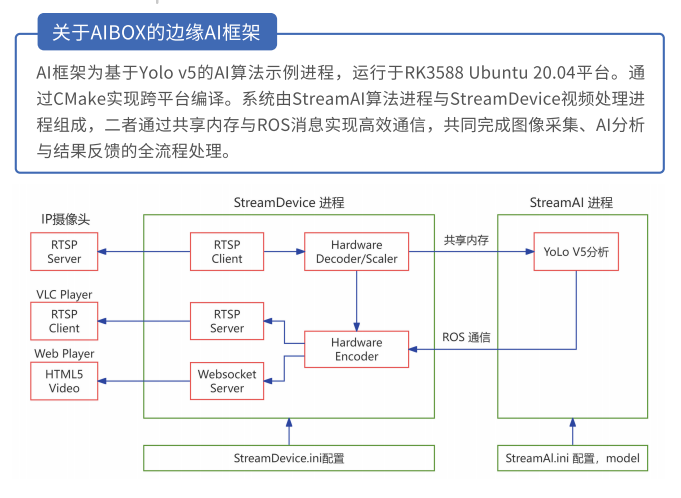
AI Mission Cloud 不是一个算法平台,而是一个多模态 AI 推理与任务编排的基础设施。它通过端侧实时感知(YOLO)与云端语义推理(CLIP / VLM),为无人系统提供可扩展、可组合、可合作的 AI 能力。
AI Mission Cloud 分层架构
架构分 4 层
① AI Runtime Layer(端侧)
-
YOLO / Depth / Tracking
-
CLIP Embedding(可选)
-
推理状态监控
② Semantic Abstraction Layer(端 → 云)
-
Detection Schema
-
Embedding Schema
-
Event Schema
③ Mission Reasoning Layer(云端)
-
CLIP / VLM
-
规则引擎
-
多模态关联推理
④ Task Orchestration Layer(云端)
-
任务 DSL
-
状态机 / 行为树
-
VLA
AI Mission Cloud 负责
-
模型注册规范(Model Manifest)
-
推理接口规范(Input / Output Schema)
-
性能约束(FPS / Latency / Memory)
-
模型热更新 / 回滚机制
合作伙伴负责:
-
数据
-
标注
-
训练
-
精度指标
是否需要 VLA / VLN
1️⃣ 什么时候不需要VLA / VLN
以下场景 不值得现在上:
-
仅 DAA、防撞、巡检
-
规则清晰、目标固定
-
强实时闭环控制
YOLO + 规则 + 状态机 = 最稳
2️⃣ 什么时候值得引入 VLA / VLN
当出现以下需求:
-
「看懂任务说明」
-
「自然语言任务」
-
「跨感知-决策-动作」
-
「任务级泛化」
例如:
“巡检这个区域,如果看到异常就靠近拍照,然后返回。”
这时:
-
VLM:理解“看到了什么”
-
VLA:决定“下一步做什么”
1️⃣ YOLO:端侧模型(AiBrainBox)
|
能力 |
是否端侧 |
原因 |
|---|---|---|
|
目标检测(人 / 车 / 障碍物) |
✅ 必须 |
实时性、闭环控制 |
|
DAA / 防撞 |
✅ 必须 |
延迟 < 50ms |
|
ROI 筛选 / Track |
✅ |
降低上行带宽 |
YOLO 在端侧的角色:“感知层算子”(Perception Operator)
端侧YOLO框架:
-
模型加载接口
-
统一输出结构(Detection Schema)
-
推理状态管理(帧率 / 置信度 / 算力占用)
2️⃣ CLIP:端云协同的“语义桥梁模型”
-
端侧 CLIP 可以用于:
|
能力 |
是否推荐 |
|---|---|
|
图像 → 向量 embedding |
⚠️ 可选 |
|
YOLO 结果语义增强 |
✅ 推荐 |
|
本地快速语义过滤 |
✅ |
-
云端 CLIP 的典型角色:
-
文本 ↔ 图像 / 目标的语义匹配
-
“是否出现过 X 类目标”
-
跨任务、跨设备的 语义一致性
端侧 AI vs 云端 AI部署
✅ 端侧 AI(AIBrainBOX)
关键词:实时、确定性、闭环
端侧应该只做:
-
感知(YOLO / 深度 / 跟踪)
-
低阶理解(CLIP embedding、类别映射)
-
安全决策(防撞、避障、告警)
-
数据裁剪与结构化上传
👉 输出的是:
-
结构化事件
-
语义向量
-
低频关键帧
✅☁️ 云端 AI(AI Mission Cloud)
关键词:语义、任务、推理、不确定性
云端应该做:
-
多模态语义推理(CLIP / VLM)
-
跨时间任务理解
-
任务规划 / 规则引擎
-
多设备协同理解
👉 云端不追求毫秒级实时,而追求:
-
可解释
-
可扩展
-
可组合
全国产通感算控一体化AiBrainBox
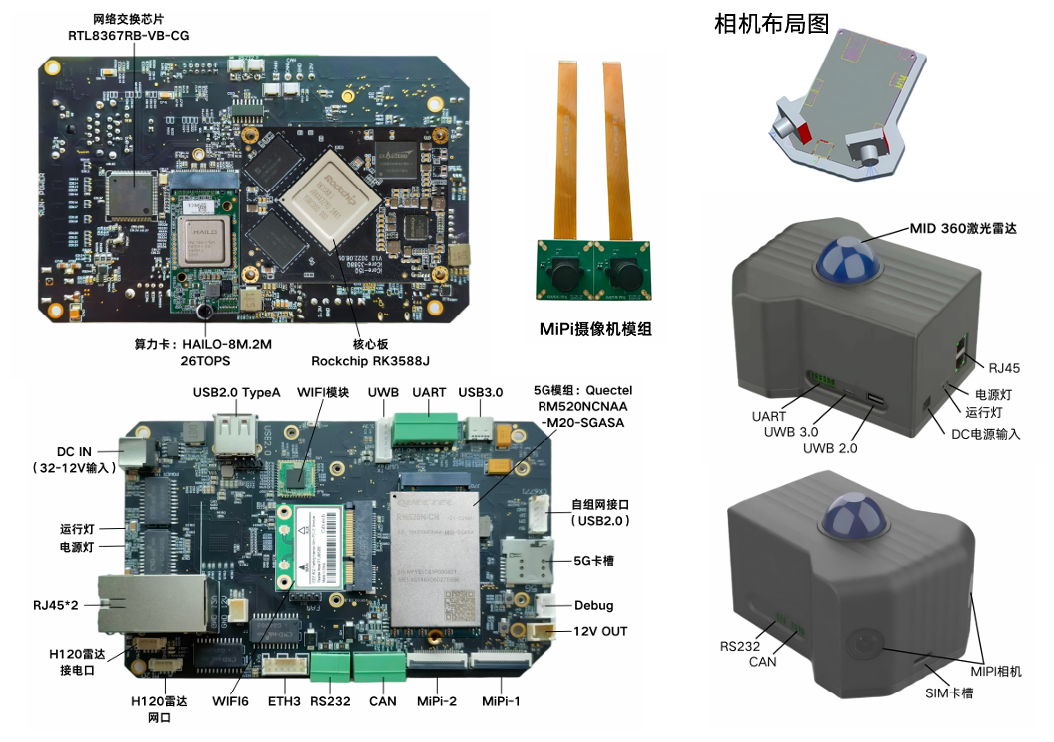
双MIPI相机接口(高帧率、全局曝光)
国产化Sensor、130万像素,全局曝光、高帧率(最高可达240、推荐60-100帧)
ISP定制
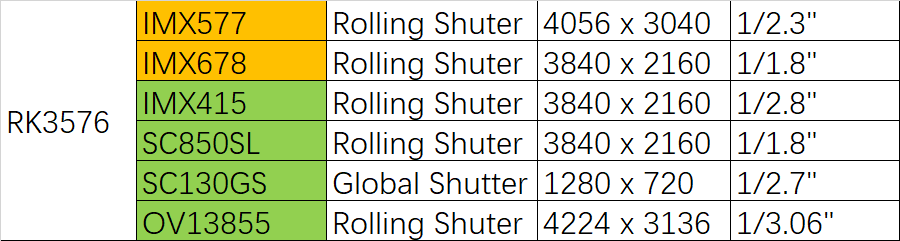
可选MIPI相机模组:


AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐
 2
2 0
0- 0



 已为社区贡献13条内容
已为社区贡献13条内容

所有评论(0)