基于NMPC的非线性模型预测控制算法轨迹跟踪与避障系统(针对无人车的精准控制)
基于NMPC(非线性模型预测控制算法)轨迹跟踪与避障控制算法研究 仅供学习算法使用 这段代码是一个用于无人车路径跟踪的程序。下面我将对程序进行详细的分析。 首先,代码的前几行是一些初始化设置,包括清除变量、关闭警告、添加路径等。然后定义了一些模拟参数,如模拟时间、预测步数、时间步长等。 接下来,定义了一个地图的结构体`Map`,其中包含了一系列的点坐标,用于描述路径。然后调用了`waypoint`函数对地图进行处理。 然后,程序初始化了一些状态参数,并定义了一些权重矩阵`W`和`WN`,用于优化控制问题。 接下来,程序进入主循环,直到模拟时间达到设定的时间长度。在每次循环中,程序首先更新当前位置,并判断是否到达目标点。然后计算参考轨迹和障碍物代价,并解决非线性模型预测控制(NMPC)最优控制问题。 在NMPC求解过程中,程序使用了一个while循环来迭代求解,直到满足收敛条件或达到最大迭代次数。在每次迭代中,程序计算控制输入,并更新状态。 最后,程序进行可视化展示,包括绘制地图、轨迹、参考轨迹等。 总的来说,这段代码实现了一个无人车路径跟踪的功能,通过优化控制问题来实现车辆的自动驾驶。主要涉及到非线性模型预测控制(NMPC)、路径规划、状态估计等知识点。
概述
本文介绍一套基于 非线性模型预测控制(NMPC) 的智能车辆轨迹跟踪与避障控制系统。该系统通过高精度车辆动力学建模、实时障碍物感知、路径约束处理以及高效的数值优化求解器,实现了在复杂环境中对预设轨迹的高精度跟踪,同时动态规避静态障碍物并满足道路边界约束。整个系统采用模块化设计,具备良好的可扩展性和工程部署能力。
系统架构与核心功能
1. 车辆动力学建模
系统采用 自行车模型(Bicycle Model) 作为车辆运动学基础,状态变量包括:
- 位置坐标 $ (x, y) $
- 航向角 $ \psi $
- 纵向速度 $ v $
- 前轮转角 $ \delta $
- 纵向加速度 $ a $
控制输入为:
- 转向角变化率 $ \dot{\delta} $
- 加速度变化率 $ \dot{a} $
该模型通过一阶欧拉积分器进行离散化,适用于中低速场景下的轨迹跟踪任务,兼顾了模型精度与计算效率。
2. 轨迹生成与参考路径构建
系统支持任意形状的参考路径输入,通过样条插值(interparc 函数)将离散路点平滑化为高密度轨迹点序列。在每次控制周期内,系统根据车辆当前位置动态选取未来若干个轨迹点作为 滚动时域内的参考轨迹(CTE-based reference),并结合 视线法(LOS) 生成终端目标点,确保长期路径收敛性。
此外,系统还实现了 航向角连续性处理(yaw_discontinuity),有效解决了由于角度模 $2\pi$ 跳变导致的优化目标不连续问题。
3. 障碍物建模与避障机制
系统支持最多 5个圆形静态障碍物 的建模,每个障碍物由中心坐标与半径定义。避障策略包含两个层面:
- 硬约束:在优化问题中显式加入与障碍物边界的最小距离约束,确保车辆轨迹始终位于障碍物外部。
- 软惩罚:在目标函数中引入基于 Sigmoid函数 构造的障碍物势场项,当车辆靠近障碍物时施加平滑惩罚,提升优化问题的数值稳定性与鲁棒性。
这种“硬约束+软惩罚”的混合策略兼顾了安全性与求解效率。
4. 道路边界约束处理
系统支持动态生成 局部道路边界约束。通过在参考路径两侧偏移固定距离(acc_bd),构建两条平行边界线,并将其表示为线性不等式约束:
$$
基于NMPC(非线性模型预测控制算法)轨迹跟踪与避障控制算法研究 仅供学习算法使用 这段代码是一个用于无人车路径跟踪的程序。下面我将对程序进行详细的分析。 首先,代码的前几行是一些初始化设置,包括清除变量、关闭警告、添加路径等。然后定义了一些模拟参数,如模拟时间、预测步数、时间步长等。 接下来,定义了一个地图的结构体`Map`,其中包含了一系列的点坐标,用于描述路径。然后调用了`waypoint`函数对地图进行处理。 然后,程序初始化了一些状态参数,并定义了一些权重矩阵`W`和`WN`,用于优化控制问题。 接下来,程序进入主循环,直到模拟时间达到设定的时间长度。在每次循环中,程序首先更新当前位置,并判断是否到达目标点。然后计算参考轨迹和障碍物代价,并解决非线性模型预测控制(NMPC)最优控制问题。 在NMPC求解过程中,程序使用了一个while循环来迭代求解,直到满足收敛条件或达到最大迭代次数。在每次迭代中,程序计算控制输入,并更新状态。 最后,程序进行可视化展示,包括绘制地图、轨迹、参考轨迹等。 总的来说,这段代码实现了一个无人车路径跟踪的功能,通过优化控制问题来实现车辆的自动驾驶。主要涉及到非线性模型预测控制(NMPC)、路径规划、状态估计等知识点。
(y{\text{lower}}(x) - y)(y{\text{upper}}(x) - y) \leq 0
$$
该形式确保车辆始终位于道路可行区域内,适用于弯道、变道等复杂场景。
5. 实时优化求解
控制问题被建模为一个 非线性最优控制问题(OCP),采用 多段打靶法(Multiple Shooting) 离散,并通过 高斯-牛顿近似 构建二次规划(QP)子问题。系统支持两种高性能QP求解器:
- qpOASES:适用于中小规模稠密问题,支持热启动,适合实时嵌入式部署。
- qpDUNES:面向大规模稀疏结构问题,利用问题时序结构提升求解效率。
求解器通过 ACADO Toolkit 自动生成C代码,实现高效、可移植的嵌入式部署。
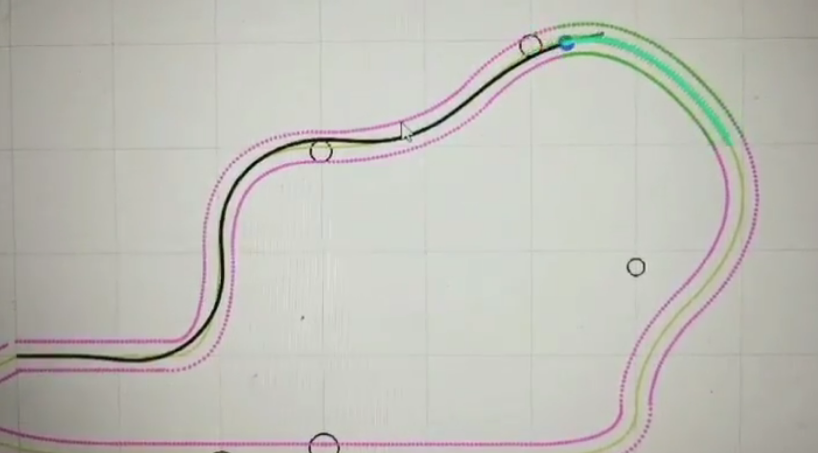
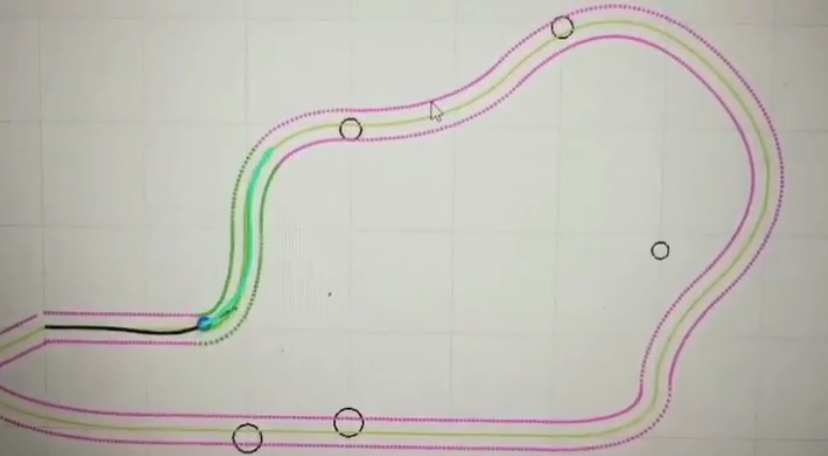
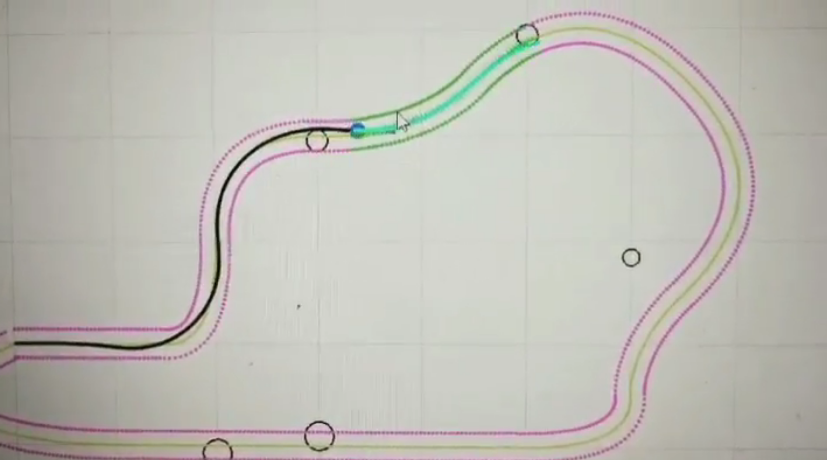
6. 仿真与可视化
系统提供完整的 闭环仿真框架,包括:
- 车辆状态积分(使用与优化器一致的积分器,保证一致性)
- 实时轨迹绘制
- 障碍物与道路边界可视化
- 控制输入、KKT残差、计算耗时等性能指标记录
可视化模块支持动态更新,便于调试与性能评估。
性能与适用场景
- 预测时域:默认50步,每步0.4秒,总预测时长20秒。
- 控制频率:2.5 Hz(可调),满足多数地面机器人实时性需求。
- 适用对象:差速/阿克曼转向的地面移动机器人、低速自动驾驶车辆。
- 环境假设:静态障碍物、已知全局路径、精确状态反馈(或高精度状态估计)。
总结
本系统将先进的NMPC理论与工程实践紧密结合,通过严谨的建模、灵活的约束处理和高效的数值求解,实现了在复杂环境下的安全、平滑、高精度轨迹跟踪与避障。其模块化设计便于集成到更高层的自主导航系统中,为智能移动平台提供了可靠的底层运动控制解决方案。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐



 12
12 0
0- 0



 已为社区贡献179条内容
已为社区贡献179条内容

所有评论(0)