Unity PICO4 学习记录7:访问彩色相机
前两个月更新的PICO Unity Integration SDK3.4.0版本支持在消费版PICO 4 Ultra设备上使用 PXR_CameraImage 类提供的接口来管理相机图像数据(但还是不能访问深度传感器)。
相机图像数据(用户设备) | PICO 开发者平台![]() https://developer-cn.picoxr.com/document/unity/camera-image-data-management/PXR_CameraImage | PICO 开发者平台
https://developer-cn.picoxr.com/document/unity/camera-image-data-management/PXR_CameraImage | PICO 开发者平台![]() https://developer-cn.picoxr.com/reference/unity/client-api/PXR_CameraImage/#02a2ba70参照上述说明文档和api手册,实现双路相机 → PC 预览
https://developer-cn.picoxr.com/reference/unity/client-api/PXR_CameraImage/#02a2ba70参照上述说明文档和api手册,实现双路相机 → PC 预览
首先要权限声明,在AndroidManifest.xml 中声明相机权限。
<uses-permission android:name="android.permission.CAMERA" />
写一个测试代码:
using UnityEngine;
using Unity.XR.PXR;
public class testCamera : MonoBehaviour
{
// Start is called once before the first execution of Update after the MonoBehaviour is created
void Start()
{
PxrResult ret = PXR_CameraImage.GetAvailableCameras(out XrCameraIdPICO[] cameraIds);
if (ret == PxrResult.SUCCESS)
{
// 打印总数
Debug.Log("[Camera] GetAvailableCameras total:" + cameraIds.Length);
foreach (var cameraId in cameraIds)
{
Debug.Log("[Camera] GetAvailableCameras cameraId:" + cameraId);
}
}
else{
Debug.Log("[Camera] GetAvailableCameras failed:" + ret);
}
}
}
ADB输出日志应看到类似内容,证明成功。
04-29 17:41:17.900 17199 18485 I Unity : [Camera] GetAvailableCameras total:2
04-29 17:41:17.900 17199 18485 I Unity : [Camera] GetAvailableCameras cameraId:XR_CAMERA_ID_RGB_LEFT_PICO
04-29 17:41:17.900 17199 18485 I Unity : [Camera] GetAvailableCameras cameraId:XR_CAMERA_ID_RGB_RIGHT_PICO双路相机画面推送到局域网的电脑上:
先用 ZeroMQ(NetMQ + pyzmq),模式为 PUSH(头显)/ PULL(PC),比 WebRTC 轻(后续可能填一下坑),适合原始 RGBA 大包调试。
架构:
头显(Unity)
- 使用 PICO SDK 的 PXR_CameraImage:枚举相机 → CreateCameraDeviceAsync / CreateCameraCaptureSessionAsync → BeginCameraCapture → 每帧 AcquireCameraImage → GetCameraImageData → 拷成紧凑 RGBA → ReleaseCameraImage。
- 主线程采集,单独线程里 NetMQ PushSocket.Connect("tcp://PC_IP:5555"),multipart 发送:[固定头 25B][payload]。
- 头里含:左右眼编号、宽高、stride、bpp、时间戳等,与 Python struct.unpack 对齐。
PC(Python)
- PULL.bind("tcp://0.0.0.0:5555"),recv_multipart,numpy + OpenCV 显示
- 透视朝向与屏幕习惯可能不一致,所以做 180° 旋转 + 水平镜像
using System;
using System.Collections;
using System.Collections.Concurrent;
using System.Collections.Generic;
using System.Runtime.InteropServices;
using System.Threading;
using System.Threading.Tasks;
using NetMQ;
using NetMQ.Sockets;
using UnityEngine;
using Unity.XR.PXR;
#if UNITY_ANDROID && !UNITY_EDITOR
using UnityEngine.Android;
#endif
/// <summary>
/// 从 PICO 左右 RGB 相机取帧,经 ZMQ PUSH 发往 PC;PC 端用 PULL + Python 脚本接收。
/// 需在 Inspector 填写本机局域网 IP(运行 zmq_camera_viewer 的机器)
/// </summary>
public class PicoCameraZmqStreamer : MonoBehaviour
{
const int HeaderBytes = 25; // 见 Python 端 struct.unpack
[SerializeField] string serverHost = "192.168.1.100";
[SerializeField] int serverPort = 5555;
[SerializeField] int targetWidth = 640;
[SerializeField] int targetHeight = 480;
[SerializeField] XrCameraImageFpsPICO targetFps = XrCameraImageFpsPICO.XR_CAMERA_IMAGE_FPS_30_PICO;
[Tooltip("When the network cannot keep up, drop older frames and send only the latest per eye (lower latency, live preview). Off = FIFO queue (higher latency if backlog).")]
[SerializeField] bool dropStaleFrames = true;
[Tooltip("ZMQ outbound queue cap (small = lower latency, may block if PC is very slow).")]
[SerializeField] int sendSocketHighWaterMark = 4;
readonly List<XrCameraIdPICO> _activeCameras = new List<XrCameraIdPICO>(2);
readonly Dictionary<XrCameraIdPICO, long> _lastCaptureTime = new Dictionary<XrCameraIdPICO, long>();
readonly ConcurrentQueue<FrameEnvelope> _sendQueue = new ConcurrentQueue<FrameEnvelope>();
Thread _netThread;
volatile bool _netRunning;
bool _pipelineReady;
int _diagEnqueueLogged;
long _diagSentTotal;
#if UNITY_ANDROID && !UNITY_EDITOR
bool _androidPermissionsGranted;
const string PvrSpatialDataPermission = "com.picovr.permission.SPATIAL_DATA";
#endif
struct FrameEnvelope
{
public byte[] Header;
public byte[] Payload;
}
void Start()
{
#if UNITY_ANDROID && !UNITY_EDITOR
StartCoroutine(StartAfterAndroidPermissions());
#else
StartCoroutine(StartPipelineCoroutine());
#endif
}
#if UNITY_ANDROID && !UNITY_EDITOR
IEnumerator StartAfterAndroidPermissions()
{
yield return EnsureAndroidCameraPermissions();
if (!_androidPermissionsGranted)
{
Debug.LogError(
"[ZmqCamera] Camera and SPATIAL_DATA (MR) permissions required. ");
yield break;
}
yield return StartPipelineCoroutine();
}
IEnumerator EnsureAndroidCameraPermissions()
{
var need = new List<string>(2);
if (!Permission.HasUserAuthorizedPermission(Permission.Camera))
need.Add(Permission.Camera);
if (!Permission.HasUserAuthorizedPermission(PvrSpatialDataPermission))
need.Add(PvrSpatialDataPermission);
if (need.Count == 0)
{
_androidPermissionsGranted = true;
yield break;
}
Debug.Log("[ZmqCamera] Requesting permissions: " + string.Join(", ", need));
var settled = false;
var callbacks = new PermissionCallbacks();
callbacks.PermissionGranted += _ =>
{
if (Permission.HasUserAuthorizedPermission(Permission.Camera) &&
Permission.HasUserAuthorizedPermission(PvrSpatialDataPermission))
{
_androidPermissionsGranted = true;
settled = true;
}
};
callbacks.PermissionDenied += name =>
{
Debug.LogWarning("[ZmqCamera] Permission denied: " + name);
settled = true;
};
callbacks.PermissionDeniedAndDontAskAgain += name =>
{
Debug.LogWarning("[ZmqCamera] Permission denied (don't ask again): " + name);
settled = true;
};
Permission.RequestUserPermissions(need.ToArray(), callbacks);
var waited = 0f;
const float timeout = 120f;
while (!settled && waited < timeout)
{
waited += Time.unscaledDeltaTime;
yield return null;
}
if (!_androidPermissionsGranted && !settled)
Debug.LogError("[ZmqCamera] Permission request timed out.");
}
#endif
IEnumerator StartPipelineCoroutine()
{
var task = InitializePipelineAsync();
while (!task.IsCompleted)
yield return null;
if (task.IsFaulted && task.Exception != null)
Debug.LogError("[ZmqCamera] Init failed: " + task.Exception.GetBaseException());
}
void Update()
{
if (!_pipelineReady)
return;
foreach (var cam in _activeCameras)
{
byte eyeIndex = cam == XrCameraIdPICO.XR_CAMERA_ID_RGB_LEFT_PICO ? (byte)0 : (byte)1;
TryEnqueueFrame(cam, eyeIndex);
}
}
void OnDestroy()
{
_netRunning = false;
try
{
_netThread?.Join(4000);
}
catch
{
// ignored
}
foreach (var cam in _activeCameras)
{
PXR_CameraImage.EndCameraCapture(cam);
PXR_CameraImage.DestroyCameraCaptureSession(cam);
PXR_CameraImage.DestroyCameraDevice(cam);
}
_activeCameras.Clear();
}
async Task InitializePipelineAsync()
{
var retEnum = PXR_CameraImage.GetAvailableCameras(out var cameraIds);
if (retEnum != PxrResult.SUCCESS || cameraIds == null || cameraIds.Length == 0)
{
Debug.LogError("[ZmqCamera] GetAvailableCameras failed: " + retEnum);
return;
}
var tryIds = new[] { XrCameraIdPICO.XR_CAMERA_ID_RGB_LEFT_PICO, XrCameraIdPICO.XR_CAMERA_ID_RGB_RIGHT_PICO };
foreach (var camId in tryIds)
{
if (Array.IndexOf(cameraIds, camId) < 0)
continue;
var devRet = await PXR_CameraImage.CreateCameraDeviceAsync(camId);
if (devRet != PxrResult.SUCCESS)
{
Debug.LogWarning("[ZmqCamera] CreateCameraDeviceAsync " + camId + " -> " + devRet);
continue;
}
if (!TryPickResolution(camId, out var w, out var h))
{
Debug.LogWarning("[ZmqCamera] No resolution for " + camId);
PXR_CameraImage.DestroyCameraDevice(camId);
continue;
}
var sessRet = await PXR_CameraImage.CreateCameraCaptureSessionAsync(
camId,
w,
h,
targetFps,
XrCameraImageFormatPICO.XR_CAMERA_IMAGE_FORMAT_RGBA_8888_PICO,
XrCameraDataTransferTypePICO.XR_CAMERA_DATA_TRANSFER_TYPE_RAW_BUFFER_PICO,
XrCameraModelPICO.XR_CAMERA_MODEL_PINHOLE_PICO);
if (sessRet != PxrResult.SUCCESS)
{
Debug.LogWarning("[ZmqCamera] CreateCameraCaptureSessionAsync " + camId + " -> " + sessRet);
PXR_CameraImage.DestroyCameraDevice(camId);
continue;
}
var beginRet = PXR_CameraImage.BeginCameraCapture(camId);
if (beginRet != PxrResult.SUCCESS)
{
Debug.LogWarning("[ZmqCamera] BeginCameraCapture " + camId + " -> " + beginRet);
PXR_CameraImage.DestroyCameraCaptureSession(camId);
PXR_CameraImage.DestroyCameraDevice(camId);
continue;
}
_activeCameras.Add(camId);
_lastCaptureTime[camId] = 0;
Debug.Log("[ZmqCamera] Streaming " + camId + " at " + w + "x" + h);
}
if (_activeCameras.Count == 0)
{
Debug.LogError("[ZmqCamera] No camera started.");
return;
}
_netRunning = true;
_netThread = new Thread(NetThreadMain)
{
IsBackground = true,
Name = "NetMQ-Push"
};
_netThread.Start();
_pipelineReady = true;
}
bool TryPickResolution(XrCameraIdPICO camId, out int w, out int h)
{
w = targetWidth;
h = targetHeight;
var ret = PXR_CameraImage.GetCameraImageResolutionCapability(camId, out var res);
if (ret != PxrResult.SUCCESS || res == null || res.Length == 0)
return true;
for (var i = 0; i < res.Length; i++)
{
if (res[i].width == targetWidth && res[i].height == targetHeight)
{
w = res[i].width;
h = res[i].height;
return true;
}
}
PxrExtent2Di best = res[0];
var bestDist = int.MaxValue;
foreach (var r in res)
{
var d = Math.Abs(r.width - targetWidth) + Math.Abs(r.height - targetHeight);
if (d < bestDist)
{
bestDist = d;
best = r;
}
}
w = best.width;
h = best.height;
return true;
}
void TryEnqueueFrame(XrCameraIdPICO camId, byte eyeIndex)
{
var last = _lastCaptureTime[camId];
var acq = PXR_CameraImage.AcquireCameraImage(camId, last, out var imageId, out var captureTime);
if (acq != PxrResult.SUCCESS)
return;
try
{
var dataRet = PXR_CameraImage.GetCameraImageData(camId, imageId, out var raw);
if (dataRet != PxrResult.SUCCESS || raw.buffer == IntPtr.Zero || raw.bufferSize == 0)
return;
var tight = CopyTightRgba(ref raw);
var header = new byte[HeaderBytes];
header[0] = eyeIndex;
BitConverter.GetBytes((uint)raw.width).CopyTo(header, 1);
BitConverter.GetBytes((uint)raw.height).CopyTo(header, 5);
BitConverter.GetBytes((uint)raw.stride).CopyTo(header, 9);
BitConverter.GetBytes((uint)raw.bytesPerPixel).CopyTo(header, 13);
BitConverter.GetBytes(captureTime).CopyTo(header, 17);
_sendQueue.Enqueue(new FrameEnvelope { Header = header, Payload = tight });
_lastCaptureTime[camId] = captureTime;
if (_diagEnqueueLogged < 5)
{
_diagEnqueueLogged++;
Debug.Log("[ZmqCamera] enqueue sample " + _diagEnqueueLogged + " eye=" + eyeIndex + " payload=" +
tight.Length + " bytes");
}
}
finally
{
PXR_CameraImage.ReleaseCameraImage(camId, imageId);
}
}
static byte[] CopyTightRgba(ref XrCameraImageDataRawBuffer raw)
{
var w = (int)raw.width;
var h = (int)raw.height;
var bpp = (int)raw.bytesPerPixel;
var stride = (int)raw.stride;
var rowTight = w * bpp;
var dst = new byte[rowTight * h];
for (var y = 0; y < h; y++)
{
var row = IntPtr.Add(raw.buffer, y * stride);
Marshal.Copy(row, dst, y * rowTight, rowTight);
}
return dst;
}
bool TryDrainLatestPerEye(out bool hasLeft, out FrameEnvelope left, out bool hasRight, out FrameEnvelope right)
{
left = right = default;
hasLeft = hasRight = false;
if (!_sendQueue.TryDequeue(out var first))
return false;
var hl = false;
var hr = false;
var el = default(FrameEnvelope);
var er = default(FrameEnvelope);
void Take(FrameEnvelope e)
{
if (e.Header == null || e.Header.Length == 0)
return;
var eye = e.Header[0];
if (eye == 0)
{
el = e;
hl = true;
}
else
{
er = e;
hr = true;
}
}
Take(first);
while (_sendQueue.TryDequeue(out var more))
Take(more);
hasLeft = hl;
hasRight = hr;
left = el;
right = er;
return true;
}
void SendOne(PushSocket push, ref FrameEnvelope env)
{
push.SendMoreFrame(env.Header);
push.SendFrame(env.Payload);
_diagSentTotal++;
if (_diagSentTotal <= 3L || _diagSentTotal % 120L == 0L)
Debug.Log("[ZmqCamera] frames sent to PC=" + _diagSentTotal);
}
void NetThreadMain()
{
try
{
AsyncIO.ForceDotNet.Force();
}
catch (Exception e)
{
Debug.LogError("[ZmqCamera] AsyncIO.ForceDotNet: " + e);
return;
}
try
{
using (var push = new PushSocket())
{
var host = (serverHost ?? string.Empty).Trim();
if (host.Length == 0)
{
Debug.LogError("[ZmqCamera] serverHost is empty");
return;
}
push.Options.Linger = TimeSpan.Zero;
push.Options.SendHighWatermark = Mathf.Max(1, sendSocketHighWaterMark);
var endpoint = "tcp://" + host + ":" + serverPort;
push.Connect(endpoint);
Debug.Log("[ZmqCamera] NetMQ PUSH -> " + endpoint +
" | start Python PULL first; allow inbound TCP " + serverPort + " on PC firewall");
Thread.Sleep(250);
while (_netRunning)
{
if (dropStaleFrames)
{
if (!TryDrainLatestPerEye(out var hasL, out var envL, out var hasR, out var envR))
{
Thread.Sleep(1);
continue;
}
try
{
if (hasL)
SendOne(push, ref envL);
if (hasR)
SendOne(push, ref envR);
}
catch (Exception ex)
{
Debug.LogError("[ZmqCamera] Send failed: " + ex.Message);
Thread.Sleep(50);
}
}
else
{
if (!_sendQueue.TryDequeue(out var env))
{
Thread.Sleep(1);
continue;
}
try
{
SendOne(push, ref env);
}
catch (Exception ex)
{
Debug.LogError("[ZmqCamera] Send failed: " + ex.Message);
Thread.Sleep(50);
}
}
}
}
}
catch (Exception e)
{
Debug.LogError("[ZmqCamera] Net thread: " + e);
}
finally
{
try
{
NetMQConfig.Cleanup(false);
}
catch
{
// ignored
}
}
}
}
挂到场景中,并修改server host为电脑的ip,然后build和install
# 依赖: pip install pyzmq opencv-python numpy
#
# 用法: python zmq_camera_viewer.py
# 默认 bind tcp://*:5555 ,与 Unity PicoCameraZmqStreamer 中端口一致。
# 防火墙需放行该端口。
# OpenCV 窗口获得焦点时按 Esc(27) 退出;无视频流时也可退出(接收超时后会轮询按键)。
import struct
import sys
import time
from typing import Optional, Tuple
import cv2
import numpy as np
import zmq
HEADER_FMT = "<BIIIIq" # eye, w, h, stride, bpp(uint32), capture_time(int64);25 字节.
HEADER_SIZE = struct.calcsize(HEADER_FMT)
def parse_header(blob: bytes) -> Optional[Tuple[int, int, int, int, int]]:
if len(blob) < HEADER_SIZE:
return None
eye, w, h, stride, bpp, _cap_t = struct.unpack(HEADER_FMT, blob[:HEADER_SIZE])
return eye, w, h, stride, bpp
def main():
port = 5555
if len(sys.argv) > 1:
port = int(sys.argv[1])
ctx = zmq.Context.instance()
sock = ctx.socket(zmq.PULL)
sock.setsockopt(zmq.RCVTIMEO, 250)
bind_addr = f"tcp://0.0.0.0:{port}"
sock.bind(bind_addr)
print(f"PULL bound {bind_addr}, waiting for PICO... (Esc to quit)")
print(
"若一直无画面: 1) 用「管理员 PowerShell」放行: "
"netsh advfirewall firewall add rule name=\"ZMQ PICO\" dir=in action=allow protocol=TCP localport="
f"{port} 2) 确认头显里 server IP 是本机当前网卡 IP 3) 尽量先开本脚本再进 VR"
)
cv2.namedWindow("_zmq_viewer_status", cv2.WINDOW_NORMAL)
cv2.resizeWindow("_zmq_viewer_status", 400, 48)
status_img = np.zeros((48, 400, 3), dtype=np.uint8)
cv2.putText(
status_img,
"Esc = quit | waiting for stream...",
(8, 30),
cv2.FONT_HERSHEY_SIMPLEX,
0.5,
(220, 220, 220),
1,
cv2.LINE_AA,
)
cv2.imshow("_zmq_viewer_status", status_img)
windows = {"0": "pico_left", "1": "pico_right"}
n_recv = 0
t_hb = time.monotonic()
def esc_pressed() -> bool:
return (cv2.waitKey(1) & 0xFF) == 27
while True:
try:
parts = sock.recv_multipart()
except zmq.Again:
now = time.monotonic()
if now - t_hb >= 2.0:
print(
f"... 尚无数据包 (已收 {n_recv} 帧). 检查防火墙入站 {port} / 头显 IP / 先开 viewer 再开 App"
)
t_hb = now
if esc_pressed():
break
continue
except KeyboardInterrupt:
break
if len(parts) != 2:
print("unexpected multipart count:", len(parts))
if esc_pressed():
break
continue
header_blob, payload = parts[0], parts[1]
n_recv += 1
if n_recv <= 3:
print(
f"收到帧 #{n_recv}: header={len(header_blob)} payload={len(payload)}"
)
parsed = parse_header(header_blob)
if not parsed:
if esc_pressed():
break
continue
eye, w, h, stride, bpp = parsed
need = w * h * bpp
if len(payload) < need:
print(f"short payload got {len(payload)} need ~{need}")
if esc_pressed():
break
continue
rgba = np.frombuffer(payload, dtype=np.uint8, count=need).reshape((h, w, 4))
bgr = cv2.cvtColor(rgba, cv2.COLOR_RGBA2BGR)
# PICO 透视相机朝向与屏幕预期不一致时校正:先 180° 再左右镜像
bgr = cv2.rotate(bgr, cv2.ROTATE_180)
bgr = cv2.flip(bgr, 1)
win = windows.get(str(eye), f"pico_cam_{eye}")
cv2.imshow(win, bgr)
if esc_pressed():
break
cv2.destroyAllWindows()
sock.close(0)
ctx.term()
if __name__ == "__main__":
main()
电脑端需防火墙放行端口
netsh advfirewall firewall add rule name=\"ZMQ PICO\" dir=in action=allow protocol=TCP localport=5555运行结果:
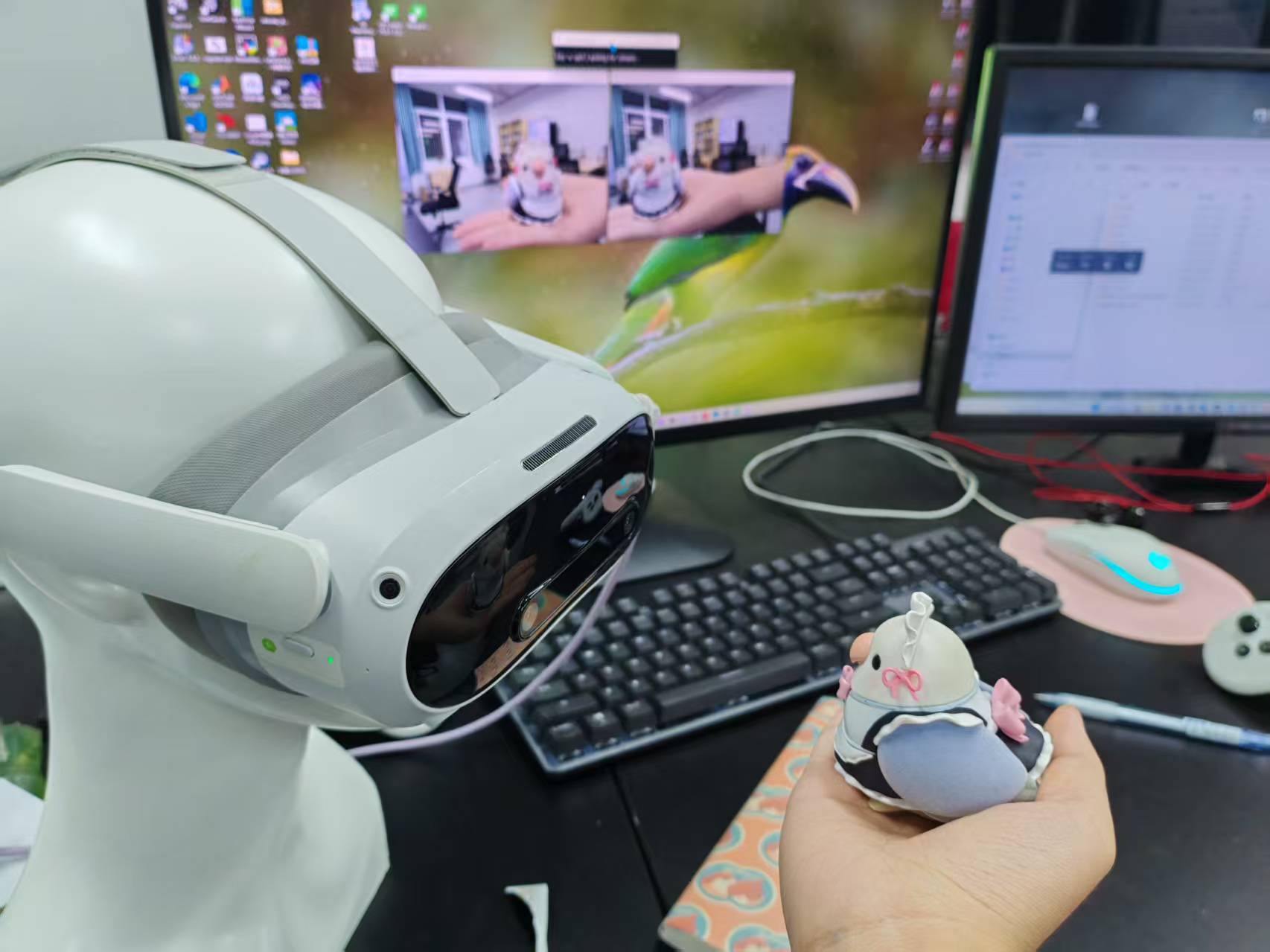
之后可能集成一些深度学习模型算法做视觉检测?似乎这个比较流行。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐



 4
4 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)