小模型无人机获取垂直速度,速度与高度互补滤波算法理解
这里有一小段代码:
pidHeightRate.measured = (pidHeightRate.measured + acc_error * dt)*0.98f + 0.02f*(Control_high - last_high)/dt;
last_high = pidHeightHigh.measured = Control_high;
其中
typedef volatile struct
{
float desired; ///期望
float offset; //
float prevError; // 上次偏差
float integ; //误差积分累加值
float kp; //p参数
float ki; //i参数
float kd; //d参数
float IntegLimitHigh; //< integral limit
float IntegLimitLow;
float measured; ////pid反馈量
float out;
float OutLimitHigh;
float OutLimitLow;
float Control_OutPut;//控制器总输出
float Last_Control_OutPut;//上次控制器总输出
float Control_OutPut_Limit;//输出限幅
/***************************************/
float Last_FeedBack;//上次反馈值
float Dis_Err;//微分量
float Dis_Error_History[5];//历史微分量
float Err_LPF;
float Last_Err_LPF;
float Dis_Err_LPF;
// int8_t Err_Limit_Flag :1;//偏差限幅标志
// int8_t Integrate_Limit_Flag :1;//积分限幅标志
// int8_t Integrate_Separation_Flag :1;//积分分离标志
Butter_BufferData Control_Device_LPF_Buffer;//控制器低通输入输出缓冲
}PidObject;
PidObject pidHeightRate;
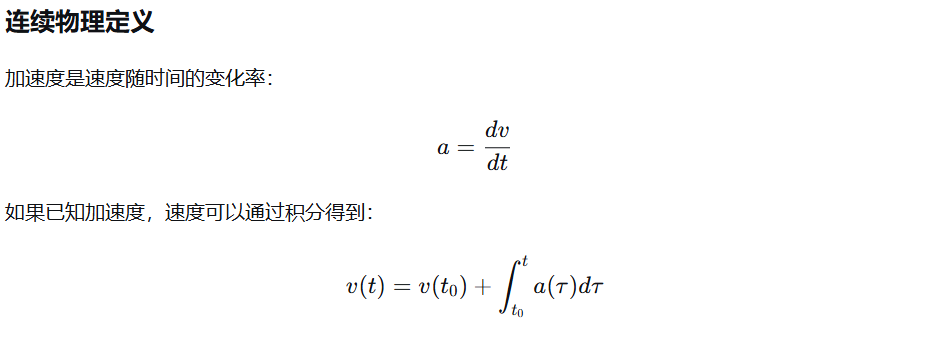
一,概念解释
需要估计垂直速度,有两种原始方法:
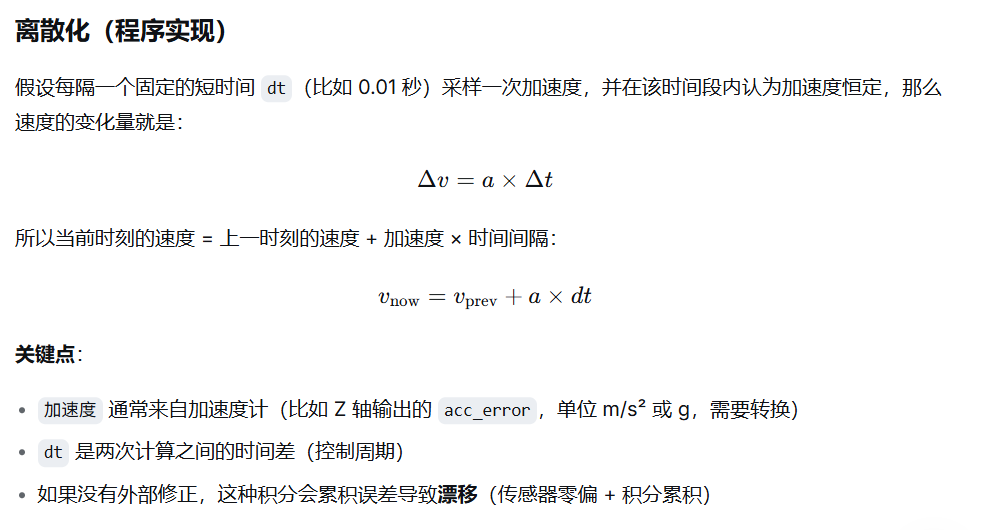
1,加速度积分
速度 = 上一时刻速度 + 加速度×dt
特点是:
短时间很准,响应快,但积分久了会漂移(传感器零偏导致)
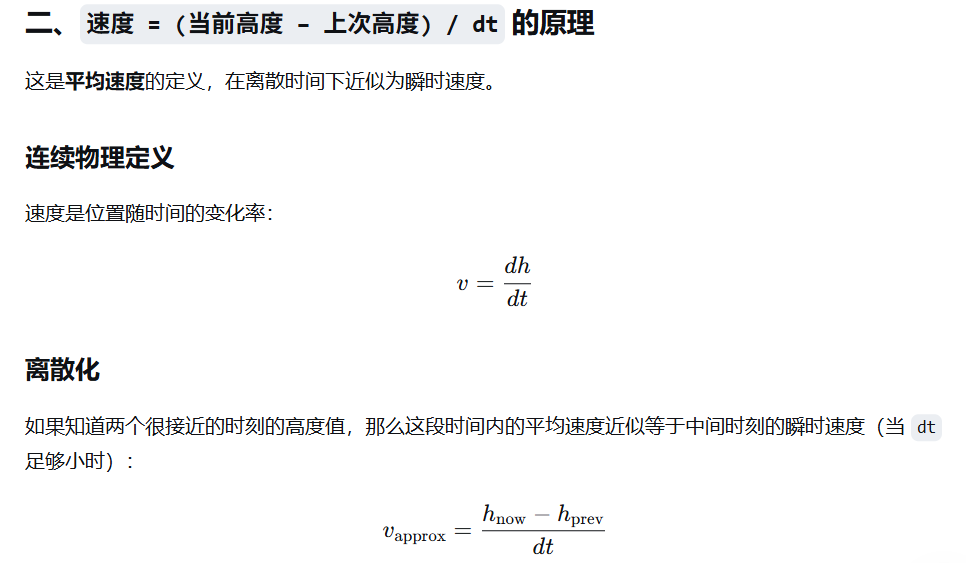
2,高度微分
速度 = (当前高度−上次高度)/dt
特点是:
没有漂移,但噪声大(高度传感器有噪声,微分放大噪声)
既想要方法①的快速响应和平滑性,又想要方法②的长期稳定性,但两者单独用都不完美。互补滤波器把两者按权重加起来,让高频成分信任加速度积分,低频成分信任高度微分,从而得到一个“既不漂移也不嘈杂”的速度估计。
注:
-
高频成分:信号中变化很快的部分,比如你用手快速抖动传感器得到的波动。
-
低频成分:信号中变化很慢的部分,比如长时间慢慢漂移出去的值。
再对应到两种测量方法
-
加速度积分:它对快速变化很敏感(你一抖它立刻有反应),但长时间会慢慢飘走。
→ 所以适合用来反映高频(快变)部分。 -
高度微分:它对快速变化反应迟钝(因为有噪声,直接微分抖得厉害),但长时间不会飘。
→ 所以适合用来反映低频(慢变、漂移)部分。
3,一阶互补滤波器的典型公式
对速度估计,最常见的形式是:
速度_估计 = α × (速度_估计_上一时刻 + 加速度×dt) + (1-α) × (高度差分速度)
-
α是一个接近 1 的数(例如 0.98 或 0.99)
-
高度差分速度 = (当前高度 − 上次高度) / dt -
α 越接近 1 → 越信任加速度,响应越快,但漂移修正越慢(可能需要几分钟才能消除漂移)
-
α 越小 → 越信任高度微分,但噪声会更大
这个滤波器在连续域相当于一个一阶低通滤波器(对误差信号)。你可以把它理解为一个截止频率为 f_c = (1-α)/(2π·dt) 的低通滤波器。当 α 接近 1 时,截止频率很低,只有极低频的误差(漂移)才被高度微分项修正,而高频噪声被滤除。
这比“直接平均”或“无记忆的加权平均”更优秀,因为它利用了历史信息(上一时刻的速度估计值),所以是一阶动态系统。
举例如下:
假设:
-
真实速度 = 1.0 m/s
-
加速度积分给出 = 1.05 m/s(轻微正漂移)
-
高度微分给出 = 0.95 m/s(有噪声,但无偏)
使用 α=0.98:
估计速度 = 0.98×1.05 + 0.02×0.95 = 1.029 + 0.019 = 1.048 m/s
比纯加速度积分(1.05)更靠近真实值,同时平滑了高度微分的噪声。经过多个周期,漂移会被逐渐拉回。
如果没有高度微分项(α=1),估计值会慢慢漂到 1.1、1.2…;如果没有加速度积分项(α=0),速度会剧烈抖动。互补滤波让两者取长补短。
4,理解一下两部分速度的物理定义
一、速度 = 上一时刻速度 + 加速度 × dt 的原理
这是匀加速直线运动的速度公式在离散时间下的应用。
关键点:
-
高度
h可以用气压计、超声波、激光测距等传感器获取 -
这个公式对噪声非常敏感,因为高度测量中如果有微小波动,除以很小的
dt会放大成很大的速度波动 -
优点是没有积分漂移,长期稳定
代码正是结合了两者:大部分信任积分结果(平滑响应快),小部分信任差分结果(抑制漂移),形成了互补滤波。
-
速度 = 上一时刻速度 + 加速度×dt:来自“速度变化量 = 加速度 × 时间”的积分思想
-
速度 = (当前高度 − 上次高度)/dt:来自“速度 = 位置变化量 ÷ 时间”的微分思想
-
两者都是物理定律在离散程序中的最直接近似,也是互补滤波的基础公式
二,代码逻辑
这两行代码实现了高度-速度串级控制中的核心融合逻辑。
整体控制逻辑图(串级PID)
期望高度 ──→ [高度外环PID] ──→ 期望速度 ──→ [速度内环PID] ──→ 执行器(电机等)
↑ ↑
高度反馈 速度反馈
(pidHeightHigh.measured) (pidHeightRate.measured)
总结:第一行做互补滤波以获得高质量速度反馈,第二行更新高度反馈并保存高度历史值,两者共同为串级高度控制提供稳定可靠的反馈信号。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐



 8
8 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)