【MATLAB例程】基于接收信号强度(RSS)的UHF RFID三维室内定位,含信号建模、噪声仿真、位置解算、性能评估
原创代码,禁止翻卖,包运行成功
代码简介
概述
本程序是基于**接收信号强度指示(RSSI)**的 UHF RFID 三维室内定位仿真系统,使用 MATLAB 实现。系统模拟了被动式 UHF RFID 标签在三维空间中的定位过程,涵盖从信号建模、噪声仿真、位置解算到统计性能评估的完整流程。
核心原理
信号传播模型
系统采用对数距离路径损耗模型,将 RSSI 与距离建立映射关系:距离越远,信号越弱,衰减量与距离的对数成正比,同时叠加高斯随机噪声模拟实际测量误差。
针对不同 RFID 体制,衰减系数有所区别:
| 模式 | 路径系数 | 适用场景 |
|---|---|---|
| 被动 UHF RFID | 双程衰减(系数加倍) | 标签无电源,信号往返传播 |
| 主动 RFID | 单程衰减 | 标签自带电源,信号单向传播 |
定位流程
含噪RSSI测量
↓
反推各锚点距离
↓
线性最小二乘 → 初始位置估计
↓
加权高斯-牛顿迭代 → 精化三维坐标
↓
输出定位结果 & 误差统计
系统组成
仿真参数
| 参数 | 默认值 | 含义 |
|---|---|---|
| 参考距离 | 1 m | 标定信号强度的基准距离 |
| 参考 RSSI | −45 dBm | 基准距离处的信号强度 |
| 路径损耗指数 | 2.0 | 反映环境对信号衰减的影响程度 |
| 测量噪声标准差 | 1.5 dB | 模拟实际 RSSI 测量的随机抖动 |
| 标签真实坐标 | (3.5, 4.2, 2.5) m | 待定位目标的真实三维位置 |
系统在一个 8m × 7m × 5m 的长方体空间内布置 8 个锚点,分别位于顶点位置,确保三维空间中几何非共面,保证方程组存在唯一解。
定位算法
第一步 — 线性最小二乘(初始估计)
对任意两个锚点的距离方程做差,消去非线性项,将问题转化为线性方程组快速求解,得到初始位置估计值。这一步计算量小、速度快,为后续精化提供良好起点。
第二步 — 加权高斯-牛顿迭代(精化)
以线性初值为出发点,考虑各锚点测距误差的不同可信程度进行加权,通过反复迭代逐步逼近真实位置。每轮迭代根据当前估计位置与各锚点的方向关系更新修正量,直到修正步长小于收敛阈值为止。引入正则化处理防止计算过程中出现数值奇异。
扩展方向
本仿真适合用于 RFID 室内定位算法研究、课程设计与论文验证,可在以下方向进一步扩展:
- 替换为更复杂的信道模型,如多径效应、阴影衰落
- 引入卡尔曼滤波实现动态目标跟踪
- 融合 TOA 或 TDOA 测量信息提升定位精度
- 调整锚点布局,分析几何精度因子(GDOP)对定位性能的影响
运行结果
定位示意图: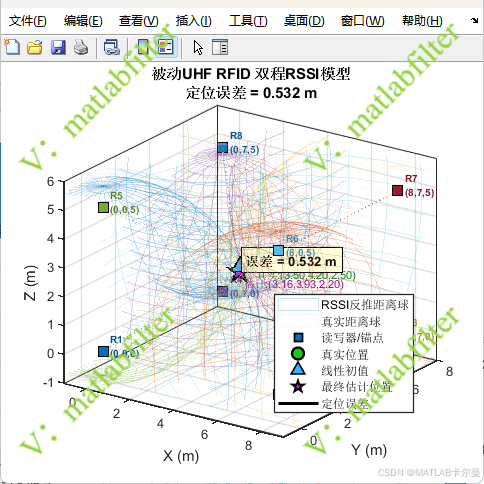
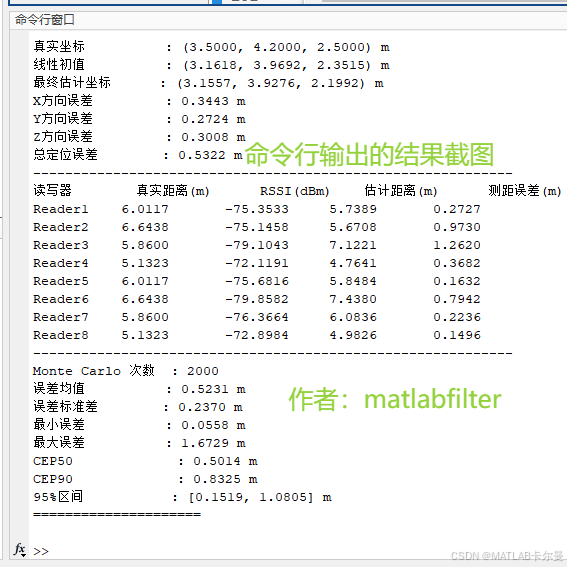
距离真值与估计值对比: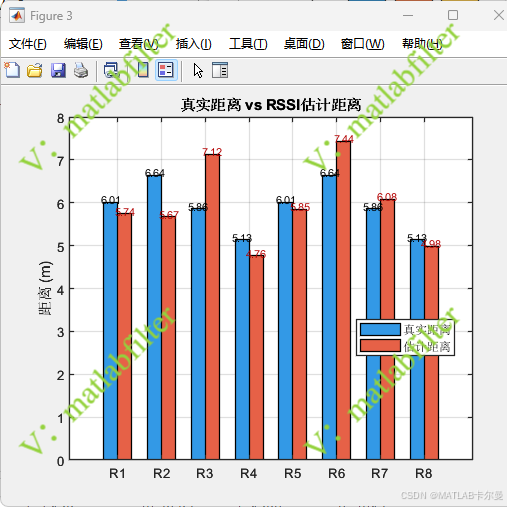
2000次蒙特卡洛下的误差分布: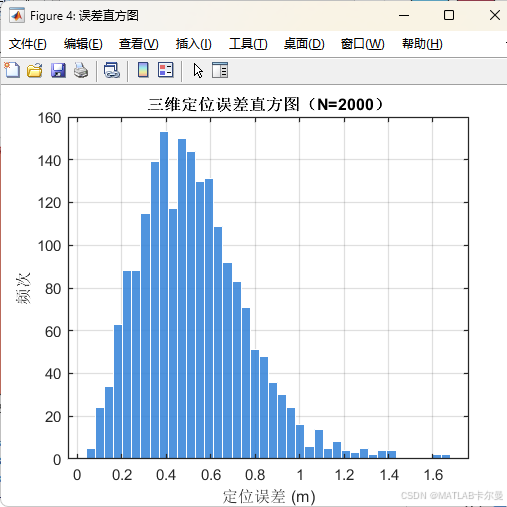
命令行输出的性能评估:
MATLAB源代码
完整代码如下:
% 基于RSSI的 RFID 三维定位仿真(更贴近被动UHF RFID原理)
% 作者:matlabfilter(V同号,除前期达成一致外,付费咨询)
% 2026-04-22 / Ver2 (三维版)
% 主要变化:
% - 坐标/锚点扩展为三维 [x,y,z]
% - 线性LS矩阵 A0 扩展为 (N-1)×3
% - 高斯-牛顿雅可比 J 扩展为 N×3,H 扩展为 3×3
% - 可视化改用 plot3 / scatter3 / mesh(球面)
clear; clc; close all;
rng(0);
%% 系统参数设置
model_type = 'passive_uhf'; % 'passive_uhf' 或 'active'
d0 = 1; % 参考距离 (m)
RSSI0 = -45; % 参考距离 d0 处的 RSSI (dBm)
n = 2.0; % 路径损耗指数
sigma_rssi = 1.5; % RSSI 测量噪声标准差 (dB)
true_pos = [3.5, 4.2, 2.5]; % 标签真实三维坐标 (m)
% 三维锚点:8个顶点(至少4个非共面保证三维可解)
anchors = [
0, 0, 0;
8, 0, 0;
8, 7, 0;
0, 7, 0;
0, 0, 5;
8, 0, 5;
8, 7, 5;
0, 7, 5
];
N = size(anchors, 1);
colors = lines(N);
switch lower(model_type)
case 'passive_uhf'
path_coeff = 20 * n;
model_name = '被动UHF RFID 双程RSSI模型';
case 'active'
path_coeff = 10 * n;
model_name = '主动RFID/普通无线节点 单程RSSI模型';
otherwise
error('model_type 只能是 ''passive_uhf'' 或 ''active'' ');
end
%% 模拟含噪RSSI并估计距离(三维距离,公式结构不变)
完整代码下载:https://download.csdn.net/download/callmeup/92836146
或前往专栏文章查看:https://blog.csdn.net/callmeup/article/details/160433066?spm=1011.2415.3001.5331
如需帮助,或有导航、定位滤波相关的代码定制需求,请点击下方卡片联系作者

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐


 10
10 0
0- 0



 已为社区贡献29条内容
已为社区贡献29条内容

所有评论(0)