具身智能人形机器人复杂工业场景应用测试场建设方案:总体业务与技术架构、高保真仿真测试平台、多模态大模型集成与训练系统...
本方案构建了一套涵盖"高保真仿真→大模型训练→多机协同调度→虚实迁移验证→数据安全治理"的全栈测试体系,旨在建立国家级人形机器人工业应用测试基准,填补国内外标准空白,加速产业规模化落地。

一、项目概述
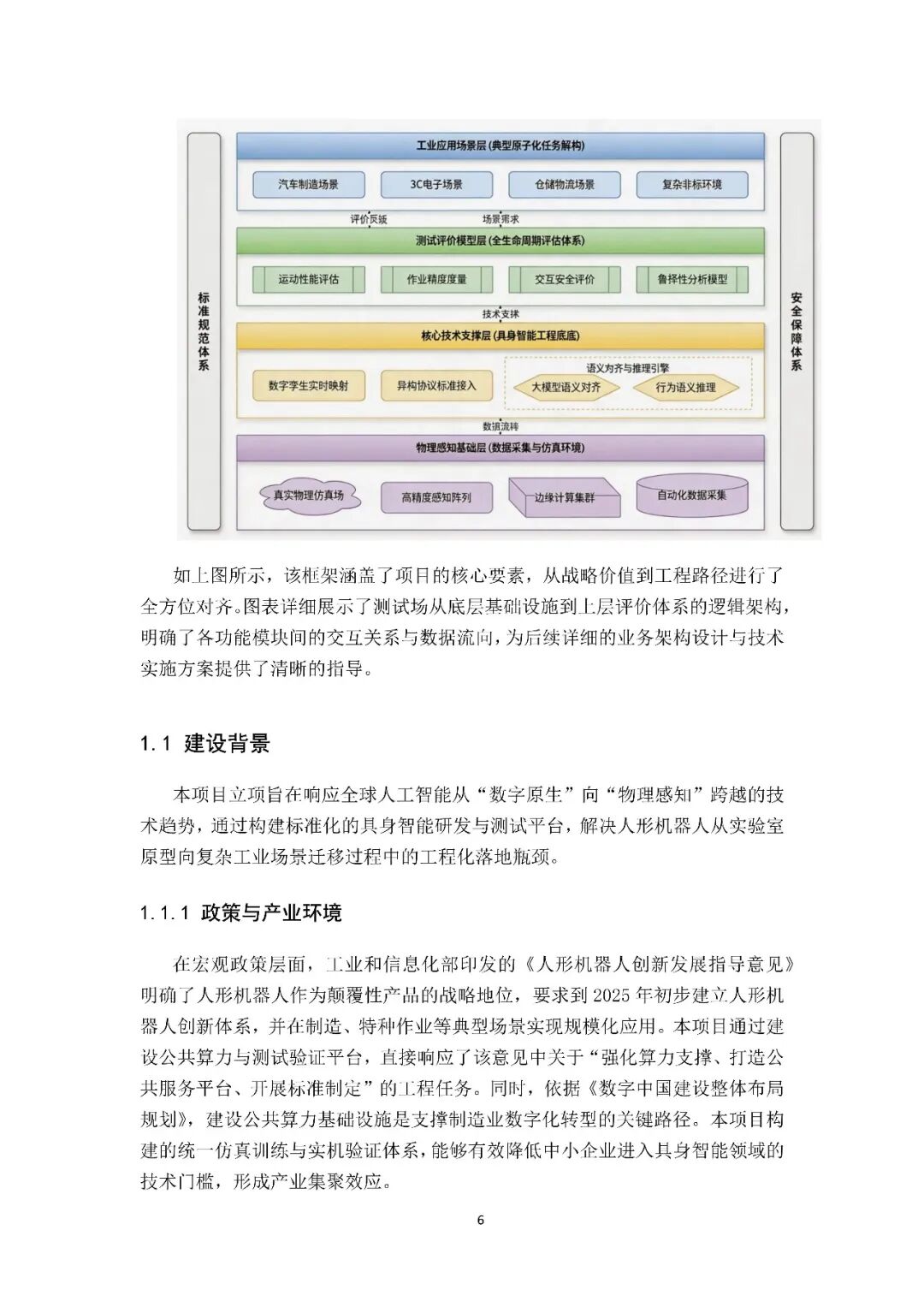
1.1 建设背景
-
政策驱动:响应工信部《人形机器人创新发展指导意见》,要求2025年初步建立人形机器人创新体系,在制造、特种作业等场景实现规模化应用。
-
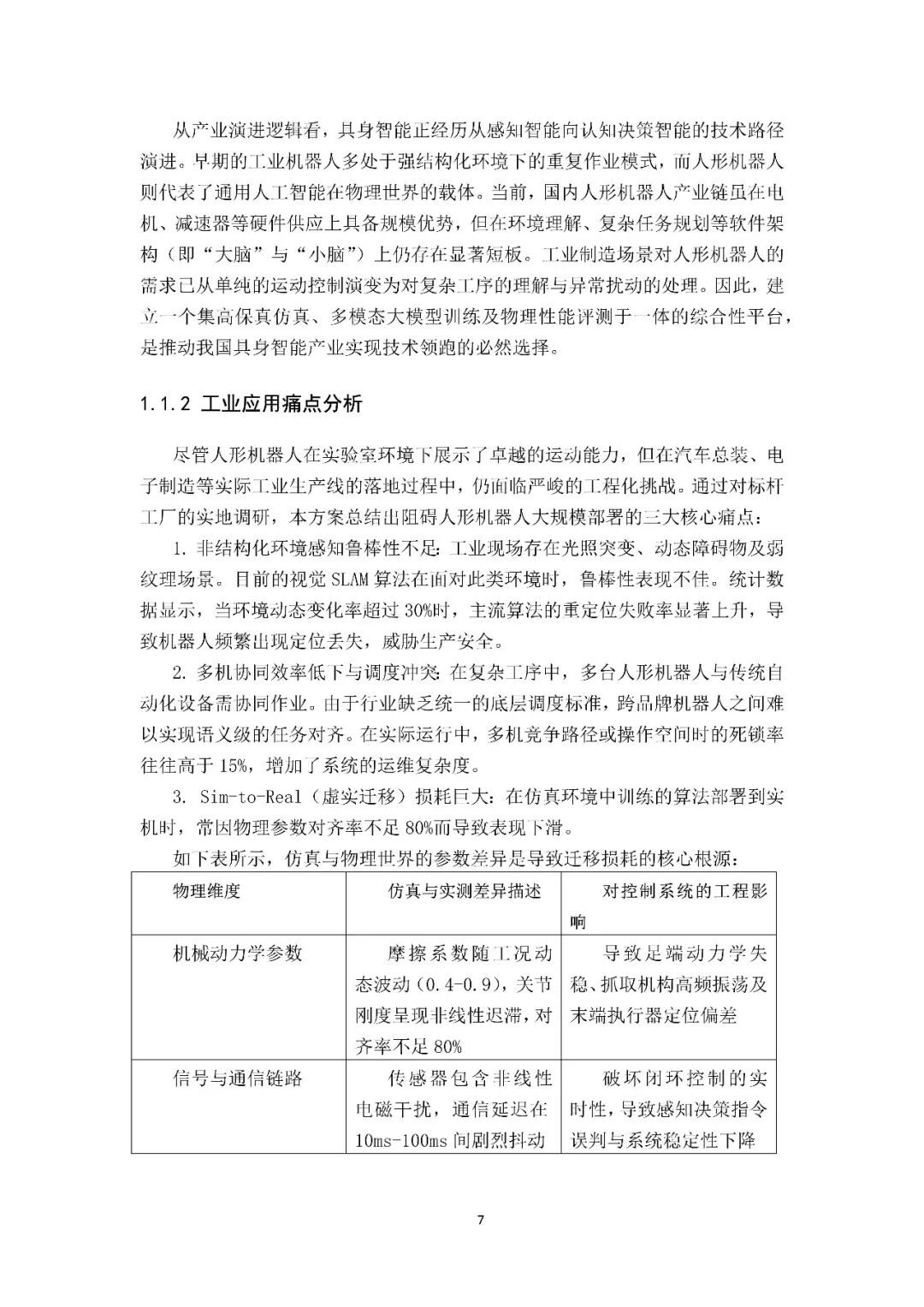
产业痛点:
-
非结构化环境感知鲁棒性不足:环境动态变化率超30%时,主流SLAM算法重定位失败率显著上升
-
多机协同效率低下:跨品牌机器人缺乏统一调度标准,多机死锁率高于15%
-
Sim-to-Real虚实迁移损耗巨大:物理参数对齐率不足80%,摩擦系数动态波动、通信延迟抖动等问题突出
-
1.2 建设目标
-
核心技术指标:
-
异构机器人并发调度 ≥50台
-
典型工业场景高保真重建 ≥100种
-
多模态大模型推理延迟 <50ms
-
虚实迁移成功率 ≥90%
-
-
经济社会效益:
-
年均标准化测试服务 ≥2000小时
-
企业综合研发成本降低 ≥30%
-
输出国家/行业标准 ≥5项
-
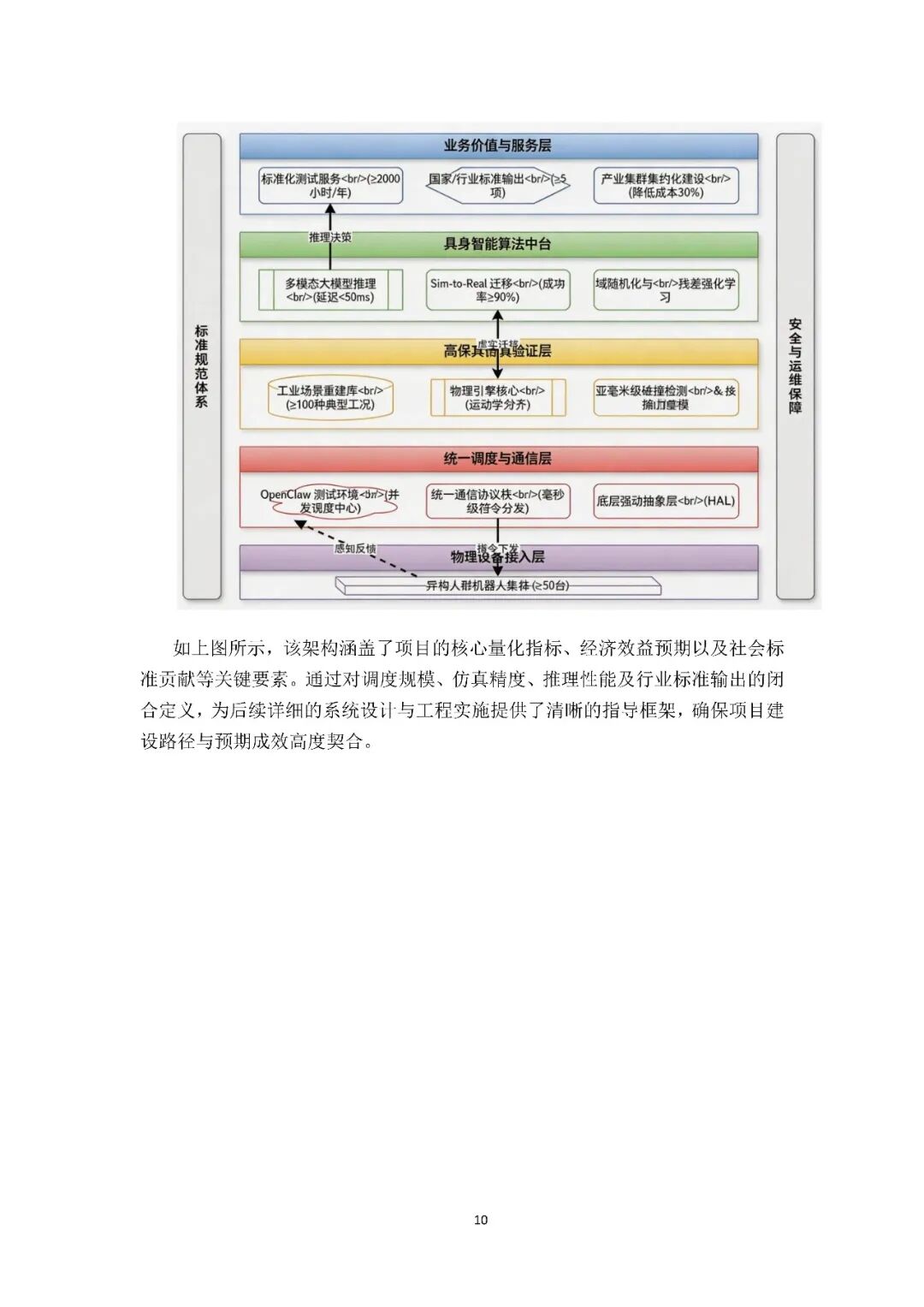
二、总体业务与技术架构
2.1 总体业务架构
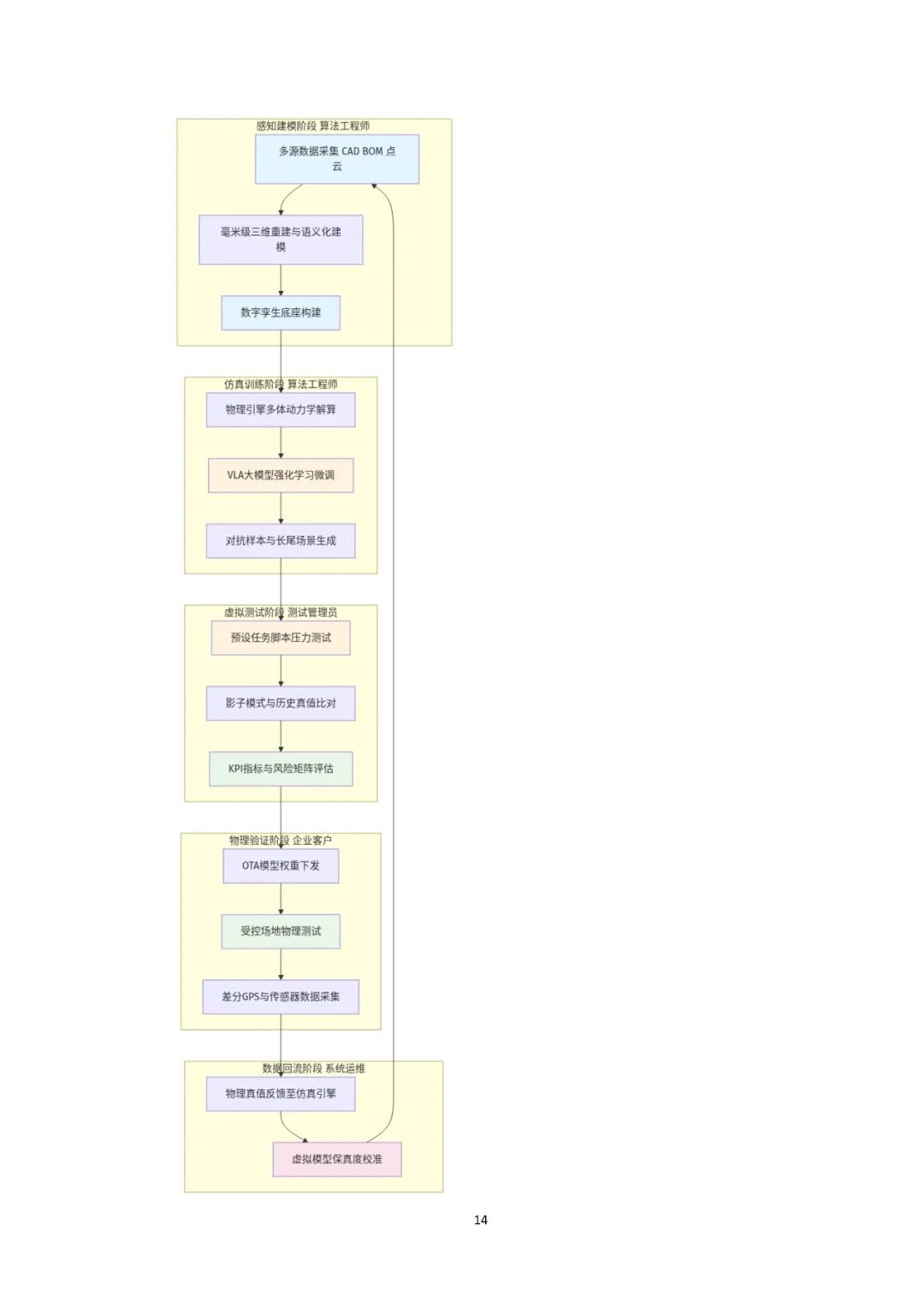
采用"比特驱动原子,原子校准比特"的虚实结合闭环流程:
|
业务阶段 |
核心逻辑 |
关键输入输出 |
|---|---|---|
|
虚实建模与训练 |
CAD/点云拓扑重建,物理引擎动力学解算,VLA模型微调 |
输入:几何数据/任务函数;输出:孪生场景/模型权重 |
|
测试验证与回流 |
虚拟压力测试,OTA下发权重,物理真值回流校准仿真精度 |
输入:测试脚本/传感器流;输出:评估报告/优化建议 |
四类核心角色:算法工程师、测试管理员、系统运维人员、企业客户,基于RBAC实现多租户隔离。
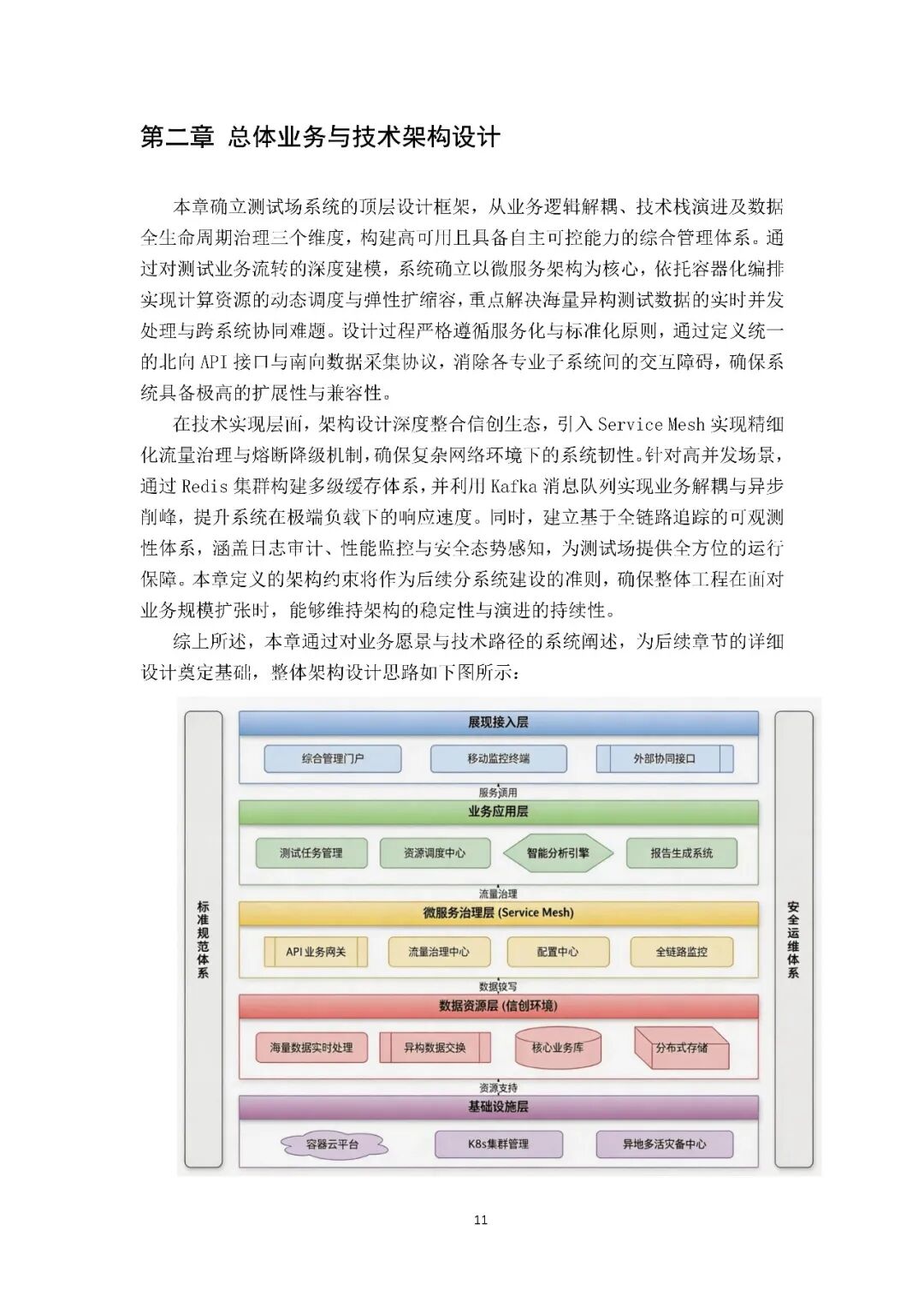
2.2 总体技术架构
-
算力底座:≥100P FLOPS智算集群 + ≥20台NVLink GPU服务器
-
网络:5G TSN架构,时延<5ms,抖动<1ms
-
存储:全闪存分布式存储,吞吐量≥200GB/s
-
信创选型:昇腾910B芯片、银河麒麟Kylin V10、达梦数据库DM8、SpringCloud Alibaba微服务架构
2.3 数据流转架构
多模态数据采集与处理链路,区分结构化流与非结构化流:
|
数据类型 |
传感器与频率 |
传输协议 |
存储引擎 |
|---|---|---|---|
|
结构化流 |
六维力矩(1000Hz)、编码器(500Hz) |
DDS/Flink |
ClickHouse |
|
非结构化流 |
RGB-D(30fps)、LiDAR(10Hz) |
MQTT/RTSP |
MinIO |
三、高保真仿真测试平台
3.1 工业场景三维重建
-
采用NeRF与3D Gaussian Splatting融合技术,结合LiDAR点云空间约束
-
建立≥50种工业典型材质的PBR属性库,精确匹配BRDF参数
-
分块管理架构(10m×10m逻辑切片),支持车间级超大规模场景
3.2 机器人动力学与传感器仿真
-
动力学仿真:多体动力学建模,兼容PhysX/Bullet/MuJoCo引擎,积分步长0.1ms-1ms
-
传感器仿真:物理渲染视觉、硬件加速LiDAR射线投射、IMU误差模型(高斯白噪声+常值偏置+温漂)
3.3 仿真测试任务管理
测试用例全生命周期管理,覆盖设计→评审→发布→执行→退役,关键质量门禁包括需求覆盖率100%、脚本规范违例数<3等。
四、多模态大模型集成与训练系统
4.1 算力与数据底座
-
算力集群:H800/A800 GPU,NVLink 4.0(600GB/s),RoCE v2无损网络
-
存储:10PB+并行文件系统(吞吐>200GB/s),Kubernetes异构资源调度
-
数据底座:Lakehouse湖仓一体架构,ODS→DWD→DWS分层体系,全链路数据血缘追踪
4.2 模型微调与强化学习
训练流水线采用"分层微调+迭代演化"策略:
-
行为克隆阶段:离线专家数据SFT微调,LoRA参数高效微调(Rank=16/32)
-
强化学习阶段:RLHF+环境反馈自动奖励建模,"世界模型"潜空间想象训练,并行环境>1024
4.3 模型推理与端侧部署
云边端三级协同:
|
部署层级 |
核心硬件 |
精度方案 |
典型延迟 |
功能定位 |
|---|---|---|---|---|
|
云端中心 |
A100/H800集群 |
FP16/BF16 |
>200ms |
复杂语义理解、长程规划 |
|
机器人终端 |
Jetson Orin/NPU |
INT4量化 |
<20ms |
避障感知、视觉伺服控制 |
五、基于OpenClaw的多机协同调度系统
5.1 核心调度引擎
-
分层架构:资源抽象层→调度逻辑层→指令分发层
-
Raft协议多副本状态同步,分片调度策略
-
多维启发式动态平衡算法(MHDB),引入PID反馈抑制"羊群效应"
5.2 复杂工业任务动态分配
-
任务接收:本体论解析引擎,将MES/ERP指令转化为标准化任务元模型
-
多级拆解:基于DAG的递归分解,生成原子动作序列
-
动态分配:MCDA实时竞价算法,综合评估硬件匹配度(0.45)、路径时延(0.25)、能源冗余(0.15)、队列负载(0.15)
-
冲突检测:时空重叠分析,秒级热切换与异常重调度
5.3 调度监控与数字孪生
-
eBPF无损网络调用链采集
-
霍尔特-温特斯异常预警
-
WebSocket实时事件流驱动1:1数字孪生映射
-
蒙特卡洛模拟预测崩溃临界点
六、实物验证与虚实迁移(Sim-to-Real)系统
6.1 物理测试场基础设施
-
场地标准:地面坡度≤0.3%,LiDAR绝对精度≤5cm,相对精度≤1cm
-
感知阵列:4K@120fps相机(PTP同步)、128线LiDAR、UWB定位(精度<10cm)
-
通信:5G-A基站(延迟<10ms)、MEC边缘计算(算力≥100 TOPS)
-
环境模拟:可编程灯光、人工降雨/造雾、可移动障碍物
6.2 虚实数据对齐与校准
采用"离线参数辨识+在线残差补偿"双环策略:
-
运动精度<0.01mm,扭矩偏差<5%
-
95%置信区间重合,时延抖动<1ms
-
影子模式一致性评分,KL散度量化失配
6.3 性能评估与标准认证
四级评估架构:
|
评估维度 |
关键指标 |
认证标准 |
|---|---|---|
|
核心作业性能 |
语义分割mIoU≥85%,定位精度±0.05mm |
GB/T 40327/ISO 9283 |
|
工业可靠性 |
MTBF≥5000小时,安全等级SIL 2/PL d |
GB/T 39172/IEC 61508 |
七、数据资源与数据安全体系
7.1 数据目录与存储架构
-
分类体系:基础主数据、业务交易数据、观测分析数据、系统元数据
-
安全分级:L1-L2低敏感(内部可见+审计日志),L3-L4高敏感(强制加密+动态脱敏)
-
存储分层:ODS→DWD→DWS→ADS,Parquet/Iceberg格式,ACID事务支持
7.2 网络安全防护
-
等保三级合规,零信任架构
-
NGFW/WAF/CWPP多层防御,SM2/SM3/SM4国密算法
-
SOAR自动化响应,CI/CD安全左移(SAST/SCA/镜像扫描)
-
容灾目标:RTO<4h,RPO≈0
八、项目实施与运营计划
8.1 实施路径
四阶段推进:
-
M1-M2:基础环境与原型构建
-
M3-M6:核心功能研发与集成(双周迭代)
-
M7-M8:系统联调与压力测试(等保三级测评)
-
M9-M12:灰度投产与正式运行(金丝雀发布)
8.2 组织架构
-
矩阵式架构,技术决策委员会+Feature Team
-
核心岗位:总架构师、后端专家(6)、前端专家(3)、SRE(2)、安全架构师(1)
-
"1-5-10"应急响应规范:1分钟告警触发、5分钟故障定位、10分钟业务恢复
8.3 投资估算
-
直接建设成本:4,200万元(84%),含计算/存储硬件、OS/DB授权、核心开发
-
支撑与预备费:800万元(16%),含压测、等保测评、5%风险缓冲金
-
资金拨付:基础期30%→攻坚期50%→验收期20%
-
EVM挣值管理,10%偏差预警阈值
九、风险管理与应急预案
9.1 核心风险识别
|
风险类别 |
核心风险项 |
应对策略 |
|---|---|---|
|
技术架构 |
级联失效、分布式事务不一致 |
混沌工程演练、自动化熔断降级、异步补偿 |
|
供应链 |
硬件交付延迟、信创兼容性故障 |
双供应商备份、20%安全库存、私有镜像仓库 |
9.2 应急响应体系
-
"监测预警→抑制处置→根因溯源→恢复加固"闭环
-
DDoS攻击:智能流量清洗+动态熔断+HPA弹性扩容,RTO<15分钟
-
数据库故障:多活自动切流+binlog点位恢复,RTO<10分钟
-
定期混沌工程演练,持续丰富自动化运维Playbooks

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐


 8
8 0
0- 0



 已为社区贡献112条内容
已为社区贡献112条内容

所有评论(0)