第十九章:封装红黑树实现mymap和myset
第十九章:封装红黑树实现mymap和myset
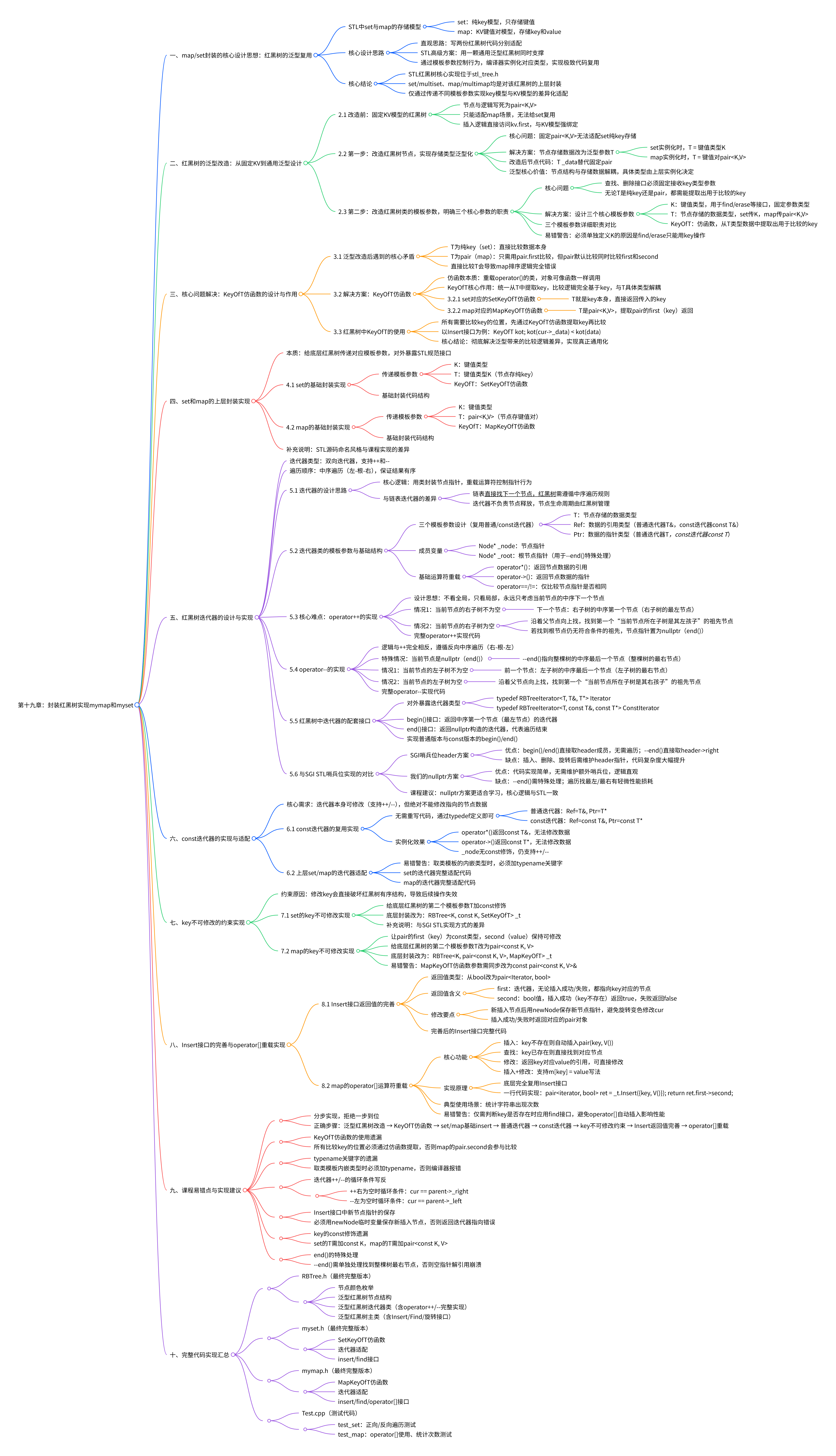
一、map/set封装的核心设计思想:红黑树的泛型复用
我们之前手动实现的红黑树是固定的KV键值对模型,而STL中:
set是纯key模型,只存储键值,不存储关联值map是KV键值对模型,存储key和对应的value
最直观的实现思路是写两份红黑树代码,分别适配key模型和KV模型,但STL源码采用了更高级的泛型设计:用一颗通用泛型红黑树,同时支撑set和map的底层实现,通过模板参数控制红黑树的行为,最终由编译器实例化出对应类型的红黑树,实现极致的代码复用。
【核心结论】STL中红黑树的核心实现位于
stl_tree.h头文件,set/multiset、map/multimap均是对这颗红黑树的上层封装,仅通过传递不同的模板参数,实现了key模型和KV模型的差异化适配。
二、红黑树的泛型改造:从固定KV到通用泛型设计
我们先从最基础的固定KV红黑树开始,按照课程步骤一步步完成泛型改造,每一步都明确修改原因和解决的问题。
2.1 改造前:固定KV模型的红黑树(初始版本)
这是我们最开始实现的红黑树,节点和逻辑完全写死为KV键值对,只能适配map场景,无法给set复用。
#pragma once
enum Colour
{
RED,
BLACK
};
// 固定KV模型的红黑树节点
template<class K, class V>
struct RBTreeNode
{
pair<K, V> _kv; // 写死存储pair键值对
RBTreeNode<K, V>* _left;
RBTreeNode<K, V>* _right;
RBTreeNode<K, V>* _parent;
Colour _col;
RBTreeNode(const pair<K, V>& kv)
:_kv(kv)
, _left(nullptr)
, _right(nullptr)
, _parent(nullptr)
, _col(RED)
{}
};
// 固定KV模型的红黑树类
template<class K, class V>
class RBTree
{
typedef RBTreeNode<K, V> Node;
public:
// 插入逻辑写死用kv.first比较
bool Insert(const pair<K, V>& kv)
{
if (_root == nullptr)
{
_root = new Node(kv);
_root->_col = BLACK;
return true;
}
Node* parent = nullptr;
Node* cur = _root;
while (cur)
{
if (cur->_kv.first < kv.first) // 直接访问kv.first,和KV模型强绑定
{
parent = cur;
cur = cur->_right;
}
else if (cur->_kv.first > kv.first)
{
parent = cur;
cur = cur->_left;
}
else
{
return false;
}
}
// 后续插入、旋转、变色逻辑省略,和KV模型强绑定
// ...
}
private:
Node* _root = nullptr;
};
2.2 第一步:改造红黑树节点,实现存储类型泛型化
核心问题:固定的pair<K,V>导致节点只能存储键值对,无法适配set的纯key存储需求。
解决方案:将节点的存储数据改为泛型参数T,节点存储的内容完全由T决定:
- set实例化时,
T= 键值类型K - map实例化时,
T= 键值对pair<K,V>
改造后的节点代码:
template<class T> // 泛型参数T,决定节点存储的数据类型
struct RBTreeNode
{
T _data; // 泛型数据,不再写死为pair
RBTreeNode<T>* _left;
RBTreeNode<T>* _right;
RBTreeNode<T>* _parent;
Colour _col;
RBTreeNode(const T& data)
:_data(data)
, _left(nullptr)
, _right(nullptr)
, _parent(nullptr)
, _col(RED)
{}
};
【补充说明】泛型的核心价值在这里体现:我们不用关心
T到底是什么类型,只需要定义节点的通用结构,具体的存储类型由上层使用者实例化时决定,实现了节点结构和存储数据的解耦。
2.3 第二步:改造红黑树类的模板参数,明确三个核心参数的职责
核心问题:节点改为泛型T后,红黑树需要解决两个关键问题:
- 查找、删除接口必须固定接收
key类型参数,不能随T变化 - 无论
T是纯key还是pair,都必须能提取出用于比较的key
解决方案:红黑树类设计三个核心模板参数,各司其职:
// K: 键值类型,用于find/erase等接口,固定参数类型
// T: 节点存储的数据类型,set传K,map传pair<K,V>
// KeyOfT: 仿函数,从T类型的数据中提取出用于比较的key
template<class K, class T, class KeyOfT>
class RBTree
{
typedef RBTreeNode<T> Node;
// 后续实现...
};
三个模板参数的详细职责:
| 模板参数 | 核心职责 | 不可替代的原因 |
|---|---|---|
K |
定义键值的类型,为find/erase等接口提供固定的参数类型 |
无论节点存的是纯key还是pair,查找/删除都只能用key来操作,必须单独定义key的类型 |
T |
定义红黑树节点实际存储的数据类型 | 实现set和map的复用,由上层决定节点存什么 |
KeyOfT |
仿函数,从T类型的数据中提取出key |
统一纯key和pair的key提取逻辑,让红黑树不用关心T的具体类型 |
【易错警告】很多同学会疑惑“第二个参数
T已经能决定存储类型,为什么还要第一个参数K?”。核心原因是find/erase接口必须接收key类型的参数,比如map的find只能传key,不能传整个pair,所以必须单独定义K类型。
三、核心问题解决:KeyOfT仿函数的设计与作用
3.1 泛型改造后遇到的核心矛盾
节点存储改为泛型T后,比较逻辑出现了致命问题:
- 如果
T是纯key(set场景),直接比较数据本身即可 - 如果
T是pair(map场景),我们只需要用pair的first(key)比较,但pair的默认比较运算符会同时比较first和second,完全不符合红黑树的排序规则
直接比较T会导致map的排序逻辑完全错误,我们需要一种方式,能统一从T中提取key,再用key进行比较。
3.2 解决方案:KeyOfT仿函数
仿函数的本质:重载了operator()的类,其对象可以像函数一样调用,是C++中用于封装通用逻辑的经典手段。
KeyOfT的核心作用:定义一套统一的规则,从T类型的数据中提取出用于比较的key,让红黑树的比较逻辑完全基于key,和T的具体类型解耦。
3.2.1 set对应的SetKeyOfT仿函数
set的T就是key本身,所以仿函数直接返回传入的key即可:
struct SetKeyOfT
{
// 重载operator(),接收key,直接返回
const K& operator()(const K& key)
{
return key;
}
};
3.2.2 map对应的MapKeyOfT仿函数
map的T是pair<K,V>,所以仿函数需要提取pair的first(key)返回:
struct MapKeyOfT
{
// 重载operator(),接收pair,返回其first(key)
const K& operator()(const pair<K, V>& kv)
{
return kv.first;
}
};
3.3 红黑树中KeyOfT的使用
红黑树中所有需要比较key的位置,都必须先通过KeyOfT仿函数提取key,再进行比较。以Insert接口为例,改造后的核心逻辑:
template<class K, class T, class KeyOfT>
class RBTree
{
typedef RBTreeNode<T> Node;
public:
pair<Iterator, bool> Insert(const T& data)
{
if (_root == nullptr)
{
_root = new Node(data);
_root->_col = BLACK;
return {Iterator(_root, _root), true};
}
KeyOfT kot; // 实例化仿函数对象
Node* parent = nullptr;
Node* cur = _root;
while (cur)
{
// 先通过仿函数提取key,再进行比较
if (kot(cur->_data) < kot(data))
{
parent = cur;
cur = cur->_right;
}
else if (kot(cur->_data) > kot(data))
{
parent = cur;
cur = cur->_left;
}
else
{
return {Iterator(cur, _root), false}; // key已存在,插入失败
}
}
// 后续插入、旋转、变色逻辑,所有比较均通过kot提取key
// ...
}
private:
Node* _root = nullptr;
};
【核心结论】通过KeyOfT仿函数,我们彻底解决了泛型带来的比较逻辑差异问题。红黑树再也不用关心
T是纯key还是pair,只需要无脑调用仿函数提取key,就能完成所有排序、查找逻辑,实现了真正的通用化。
四、set和map的上层封装实现
完成红黑树的泛型改造后,set和map的上层封装就变得非常简单,本质上只是一个“壳”,负责给底层红黑树传递对应的模板参数,对外暴露符合STL规范的接口。
4.1 set的基础封装实现
set只有key类型,所以给红黑树传递的模板参数为:
K:键值类型T:键值类型K(节点存纯key)KeyOfT:SetKeyOfT仿函数
#pragma once
#include"RBTree.h"
namespace bit
{
template<class K>
class set
{
// 内部定义key提取仿函数
struct SetKeyOfT
{
const K& operator()(const K& key)
{
return key;
}
};
public:
// 后续会补充迭代器、find等接口
bool insert(const K& key)
{
return _t.Insert(key);
}
private:
// 底层封装泛型红黑树,传递对应模板参数
RBTree<K, K, SetKeyOfT> _t;
};
}
4.2 map的基础封装实现
map有key和value两个类型,给红黑树传递的模板参数为:
K:键值类型T:pair<K,V>(节点存键值对)KeyOfT:MapKeyOfT仿函数
#pragma once
#include"RBTree.h"
namespace bit
{
template<class K, class V>
class map
{
// 内部定义key提取仿函数
struct MapKeyOfT
{
const K& operator()(const pair<K, V>& kv)
{
return kv.first;
}
};
public:
// 后续会补充迭代器、find、operator[]等接口
bool insert(const pair<K, V>& kv)
{
return _t.Insert(kv);
}
private:
// 底层封装泛型红黑树,传递对应模板参数
RBTree<K, pair<K, V>, MapKeyOfT> _t;
};
}
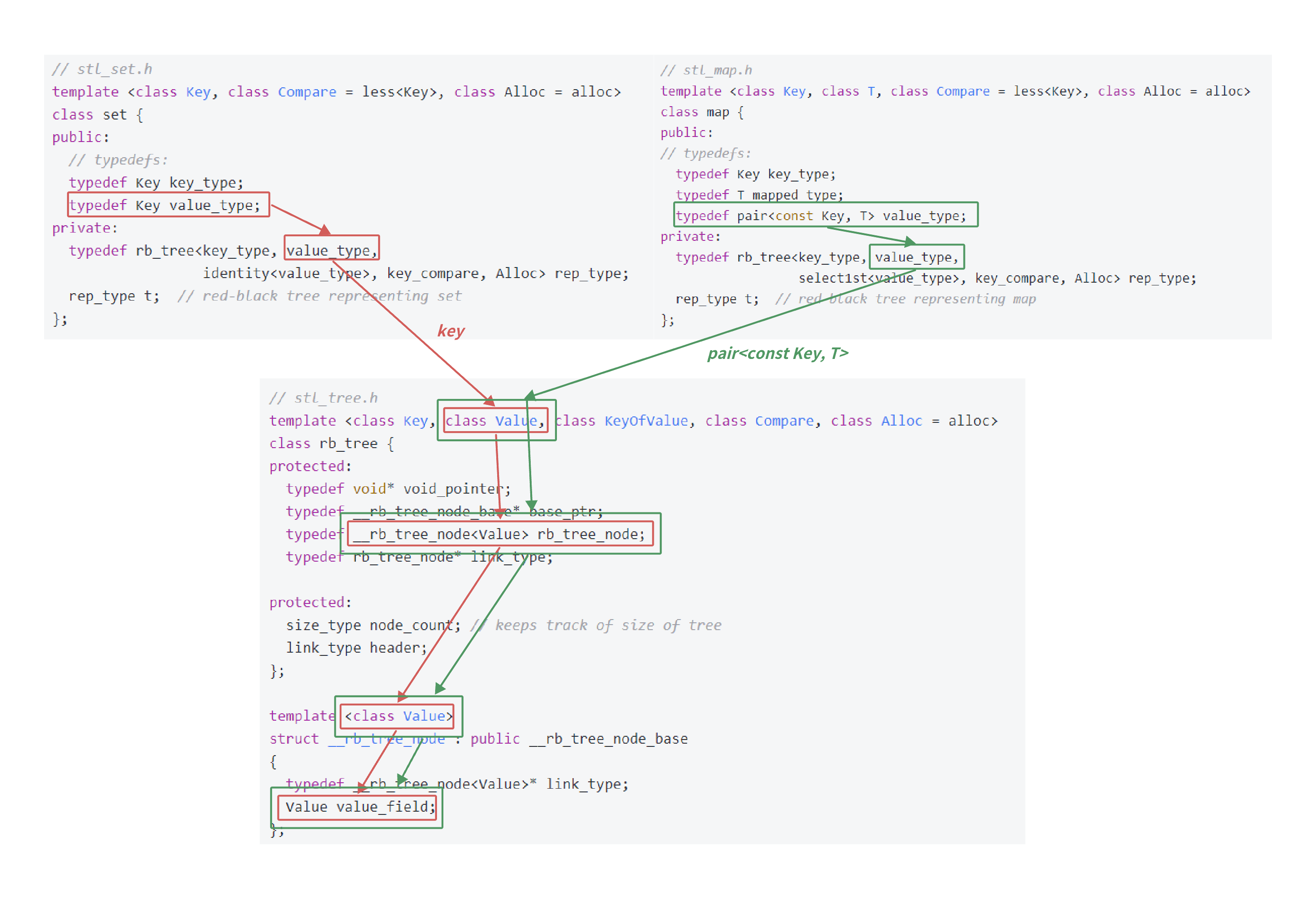
【补充说明】STL源码中,set和map的命名风格和我们略有差异,比如红黑树的模板参数命名为
Key、Value,其中Value在set中是key,在map中是pair,这也是课程中提到的“源码命名风格混乱”的点,我们自己实现时做了规范,更易理解。
五、红黑树迭代器的设计与实现
迭代器是红黑树封装的核心难点,课程中用了大量篇幅讲解其实现逻辑。红黑树的迭代器是双向迭代器,支持++和--操作,遍历顺序为红黑树的中序遍历(左-根-右),保证遍历结果是有序的。
5.1 迭代器的设计思路
和链表迭代器的核心逻辑一致:用类封装节点的指针,通过重载运算符,控制指针的行为,让其符合迭代器的遍历规范。
- 链表的
++是直接找下一个节点,而红黑树的++需要遵循中序遍历规则 - 链表的
--是直接找上一个节点,而红黑树的--需要遵循反向中序遍历规则 - 迭代器不负责节点的释放,节点的生命周期由红黑树管理
5.2 迭代器类的模板参数与基础结构
为了用一套代码同时实现普通迭代器和const迭代器,我们设计三个模板参数,控制解引用和箭头运算符的返回值类型:
// T: 节点存储的数据类型
// Ref: 数据的引用类型(普通迭代器传T&,const迭代器传const T&)
// Ptr: 数据的指针类型(普通迭代器传T*,const迭代器传const T*)
template<class T, class Ref, class Ptr>
struct RBTreeIterator
{
typedef RBTreeNode<T> Node;
typedef RBTreeIterator<T, Ref, Ptr> Self; // 迭代器自身类型,简化代码
// 成员变量:节点指针 + 根节点指针
Node* _node;
Node* _root; // 用于--end()的特殊处理
// 构造函数:用节点指针和根节点初始化迭代器
RBTreeIterator(Node* node, Node* root)
:_node(node)
,_root(root)
{}
// 1. 解引用运算符:返回节点数据的引用
Ref operator*()
{
return _node->_data;
}
// 2. 箭头运算符:返回节点数据的指针
Ptr operator->()
{
return &_node->_data;
}
// 3. 相等/不等比较:仅比较节点指针是否相同
bool operator==(const Self& s) const
{
return _node == s._node;
}
bool operator!=(const Self& s) const
{
return _node != s._node;
}
// 4. 前置++运算符:核心遍历逻辑
Self& operator++();
// 5. 前置--运算符:反向遍历逻辑
Self& operator--();
};
【补充说明】三个模板参数的设计是STL迭代器的经典技巧,避免了写两份几乎完全一样的普通迭代器和const迭代器代码,仅通过模板参数的差异,实现了const语义的控制。
5.3 核心难点:operator++的实现
迭代器++的核心设计思想:不看全局,只看局部,永远只考虑当前节点的中序下一个节点。
中序遍历规则是左-根-右,当前节点已经被访问,下一个节点分两种情况处理:
情况1:当前节点的右子树不为空
当前节点访问完成后,下一个要访问的是右子树的中序第一个节点,也就是右子树的最左节点。
【举例】节点10的右子树不为空,右子树的最左节点是15,所以
++it后,迭代器指向15。
情况2:当前节点的右子树为空
说明当前节点所在的子树已经全部访问完成,需要沿着父节点向上找,找到第一个“当前节点所在子树是其左孩子”的祖先节点,这个祖先就是下一个节点。如果一直找到根节点都没有符合条件的祖先,说明整棵树遍历完成,将节点指针置为nullptr(即end())。
【举例】节点15的右子树为空,向上找:15是父节点10的右孩子,继续往上;10是父节点18的左孩子,符合条件,所以
++it后,迭代器指向18。
// 前置++运算符实现
template<class T, class Ref, class Ptr>
Self& RBTreeIterator<T, Ref, Ptr>::operator++()
{
if (_node->_right)
{
// 情况1:右子树不为空,找右子树的最左节点
Node* minLeft = _node->_right;
while (minLeft->_left)
{
minLeft = minLeft->_left;
}
_node = minLeft;
}
else
{
// 情况2:右子树为空,向上找符合条件的祖先
Node* cur = _node;
Node* parent = cur->_parent;
//找到第一个“当前节点所在子树是其左孩子”的祖先节点
// 循环条件:父节点不为空,且当前节点是父节点的右孩子
while (parent && cur == parent->_right)
{
cur = parent;
parent = parent->_parent;
}
// 找到符合条件的parent,或parent为nullptr(遍历结束)
_node = parent;
}
return *this;
}
5.4 operator–的实现
--的逻辑和++完全相反,遵循反向中序遍历规则右-根-左,同样分三种情况处理:
特殊情况:当前节点是nullptr(即end())
--end()需要指向整棵树的中序最后一个节点,也就是整棵树的最右节点,需要通过_root遍历找到最右节点。
情况1:当前节点的左子树不为空
前一个节点是左子树的中序最后一个节点,也就是左子树的最右节点。
情况2:当前节点的左子树为空
沿着父节点向上找,找到第一个“当前节点所在子树是其右孩子”的祖先节点,这个祖先就是前一个节点。
// 前置--运算符实现
template<class T, class Ref, class Ptr>
Self& RBTreeIterator<T, Ref, Ptr>::operator--()
{
if (_node == nullptr)
{
// 特殊情况:--end(),找整棵树的最右节点
Node* maxRight = _root;
while (maxRight && maxRight->_right)
{
maxRight = maxRight->_right;
}
_node = maxRight;
}
else if (_node->_left)
{
// 情况1:左子树不为空,找左子树的最右节点
Node* rightMost = _node->_left;
while (rightMost->_right)
{
rightMost = rightMost->_right;
}
_node = rightMost;
}
else
{
// 情况2:左子树为空,向上找符合条件的祖先
Node* cur = _node;
Node* parent = cur->_parent;
//找到第一个“当前节点所在子树是其右孩子”的祖先节点,这个祖先就是前一个节点。
// 循环条件:父节点不为空,且当前节点是父节点的左孩子
while (parent && cur == parent->_left)
{
cur = parent;
parent = cur->_parent;
}
_node = parent;
}
return *this;
}
5.5 红黑树中迭代器的配套接口
迭代器类实现完成后,需要在红黑树类中对外暴露迭代器类型,并实现begin()和end()接口:
template<class K, class T, class KeyOfT>
class RBTree
{
typedef RBTreeNode<T> Node;
public:
// 对外暴露普通迭代器和const迭代器类型
typedef RBTreeIterator<T, T&, T*> Iterator;
typedef RBTreeIterator<T, const T&, const T*> ConstIterator;
// 普通版本begin():返回中序第一个节点(最左节点)的迭代器
Iterator Begin()
{
Node* minLeft = _root;
while (minLeft && minLeft->_left)
{
minLeft = minLeft->_left;
}
return Iterator(minLeft, _root);
}
// 普通版本end():返回nullptr构造的迭代器,代表遍历结束
Iterator End()
{
return Iterator(nullptr, _root);
}
// const版本begin():返回const迭代器
ConstIterator Begin() const
{
Node* minLeft = _root;
while (minLeft && minLeft->_left)
{
minLeft = minLeft->_left;
}
return ConstIterator(minLeft, _root);
}
// const版本end():返回const迭代器
ConstIterator End() const
{
return ConstIterator(nullptr, _root);
}
// 其他接口:Insert、Find、Rotate等...
private:
Node* _root = nullptr;
};
5.6 与SGI STL哨兵位实现的对比
课程中提到,SGI STL的红黑树迭代器实现和我们的版本有一个核心差异:SGI用了一个header哨兵位节点,而我们用nullptr充当end()。
| 实现方案 | 优点 | 缺点 |
|---|---|---|
| SGI哨兵位header | 1. begin()直接取header->left,end()直接取header,无需遍历找最左节点;2. --end()直接取header->right,无需特殊处理 |
每次插入、删除、旋转后,都必须维护header的left、right、parent指针,代码复杂度大幅提升 |
| 我们的nullptr方案 | 代码实现简单,无需维护额外的哨兵位节点,逻辑更直观 | --end()需要通过_root遍历找最右节点,做了特殊处理;遍历找最左/最右节点有轻微的性能损耗 |
【课程建议】我们的实现更适合学习和理解,核心逻辑和STL完全一致,避开了哨兵位的复杂维护,更易排查问题。
六、const迭代器的实现与适配
const迭代器的核心需求:迭代器本身可以修改(支持++/–),但绝对不能修改指向的节点数据,保证const对象的遍历安全。
6.1 const迭代器的复用实现
得益于我们迭代器类的三个模板参数设计,const迭代器无需重新写一套代码,只需要在红黑树中通过typedef定义即可:
// 普通迭代器:引用和指针都是非const
typedef RBTreeIterator<T, T&, T*> Iterator;
// const迭代器:引用和指针都是const,保证数据不可修改
typedef RBTreeIterator<T, const T&, const T*> ConstIterator;
当实例化const迭代器时:
operator*()返回const T&,无法修改数据operator->()返回const T*,无法修改数据- 迭代器的
_node成员没有const修饰,所以依然支持++/--操作
6.2 上层set/map的迭代器适配
需要在set和map中,把底层红黑树的迭代器对外暴露,同时实现const版本的begin()和end()。
【易错警告】取类模板的内嵌类型时,必须加
typename关键字,告诉编译器这是一个类型,否则编译器无法区分这是类型还是静态成员变量,会直接报错。
set的迭代器完整适配
template<class K>
class set
{
struct SetKeyOfT
{
const K& operator()(const K& key)
{
return key;
}
};
private:
RBTree<K, const K, SetKeyOfT> _t;
public:
// 用typename声明这是内嵌类型
typedef typename RBTree<K, const K, SetKeyOfT>::Iterator iterator;
typedef typename RBTree<K, const K, SetKeyOfT>::ConstIterator const_iterator;
// 普通版本begin/end
iterator begin()
{
return _t.Begin();
}
iterator end()
{
return _t.End();
}
// const版本begin/end
const_iterator begin() const
{
return _t.Begin();
}
const_iterator end() const
{
return _t.End();
}
// 其他接口...
};
map的迭代器完整适配
template<class K, class V>
class map
{
struct MapKeyOfT
{
const K& operator()(const pair<const K, V>& kv)
{
return kv.first;
}
};
private:
RBTree<K, pair<const K, V>, MapKeyOfT> _t;
public:
typedef typename RBTree<K, pair<const K, V>, MapKeyOfT>::Iterator iterator;
typedef typename RBTree<K, pair<const K, V>, MapKeyOfT>::ConstIterator const_iterator;
// 普通版本begin/end
iterator begin()
{
return _t.Begin();
}
iterator end()
{
return _t.End();
}
// const版本begin/end
const_iterator begin() const
{
return _t.Begin();
}
const_iterator end() const
{
return _t.End();
}
// 其他接口...
};
七、key不可修改的约束实现
红黑树是严格的有序搜索树,所有的插入、查找、删除逻辑都依赖key的有序性。如果修改了节点中的key,会直接破坏红黑树的有序结构,导致后续所有操作逻辑失效,所以必须从语法层面约束key不可修改。
7.1 set的key不可修改实现
set的节点中存储的就是key本身,所以只需要给底层红黑树的第二个模板参数T加上const修饰,让节点存储的是const K,迭代器解引用后也是const类型,无法修改。
// set底层红黑树封装,T改为const K
private:
RBTree<K, const K, SetKeyOfT> _t;
【补充说明】SGI STL的实现方式是把set的普通迭代器直接typedef成红黑树的const迭代器,这种方式会带来额外的类型转换问题,我们直接给
T加const的方式更简单直观,不易出错。
7.2 map的key不可修改实现
map的节点中存储的是pair<K,V>,我们只需要让pair的first(key)是const类型,second(value)保持可修改即可。所以给底层红黑树的第二个模板参数T改为pair<const K, V>。
// map底层红黑树封装,T改为pair<const K, V>
private:
RBTree<K, pair<const K, V>, MapKeyOfT> _t;
这样修改后:
- 迭代器解引用得到的
pair<const K, V>中,first是const,无法修改 - second是普通的V类型,可以正常修改,完全符合map的使用特性
【易错警告】修改了底层红黑树的T类型后,对应的MapKeyOfT仿函数的参数也要同步改为
const pair<const K, V>&,否则会出现类型不匹配的编译错误。
八、Insert接口的完善与operator[]重载实现
8.1 Insert接口返回值的完善
map的operator[]底层完全依赖insert接口,所以我们需要先把红黑树的Insert接口返回值从bool改为pair<Iterator, bool>,和STL规范保持一致。
返回值的含义:
first:迭代器,无论插入成功还是失败,都指向key对应的节点second:bool值,插入成功(key不存在)返回true,插入失败(key已存在)返回false
Insert接口的修改要点:
- 新插入节点后,用临时变量
newNode保存新节点的指针,避免旋转变色修改cur后,返回的迭代器指向错误 - 插入成功/失败时,返回对应的pair对象
// 完善后的Insert接口,返回pair<Iterator, bool>
template<class K, class T, class KeyOfT>
pair<typename RBTree<K, T, KeyOfT>::Iterator, bool>
RBTree<K, T, KeyOfT>::Insert(const T& data)
{
if (_root == nullptr)
{
_root = new Node(data);
_root->_col = BLACK;
return {Iterator(_root, _root), true};
}
KeyOfT kot;
Node* parent = nullptr;
Node* cur = _root;
while (cur)
{
if (kot(cur->_data) < kot(data))
{
parent = cur;
cur = cur->_right;
}
else if (kot(cur->_data) > kot(data))
{
parent = cur;
cur = cur->_left;
}
else
{
return {Iterator(cur, _root), false}; // key已存在,插入失败
}
}
// 新插入红色节点,用newNode保存新节点指针
cur = new Node(data);
Node* newNode = cur;
cur->_col = RED;
// 链接父节点
if (kot(parent->_data) < kot(data))
{
parent->_right = cur;
}
else
{
parent->_left = cur;
}
cur->_parent = parent;
// 旋转变色平衡逻辑(省略,和之前一致)
// ...
_root->_col = BLACK;
return { Iterator(newNode, _root), true }; // 插入成功,返回新节点迭代器
}
上层set和map的insert接口也要同步修改,返回值和底层保持一致。
8.2 map的operator[]运算符重载
operator[]是map最常用的特性,它同时支持插入、查找、修改三种功能,是map的核心语法糖。
operator[]的核心功能
- 插入:如果key不存在,自动插入一个
pair(key, V()),其中V()是value类型的默认构造值 - 查找:如果key已存在,直接找到对应的节点
- 修改:返回key对应value的引用,可直接修改value的值
- 插入+修改:支持
m[key] = value的写法,key不存在则插入,存在则修改
operator[]的实现原理
底层完全复用Insert接口,利用Insert返回值的特性,一行代码即可实现:
// map的operator[]重载
V& operator[](const K& key)
{
// 1. 调用Insert,key不存在则插入默认值,存在则直接返回对应迭代器
pair<iterator, bool> ret = _t.Insert({ key, V() });
// 2. 取出迭代器
iterator it = ret.first;
// 3. 返回value的引用
return it->second;
}
典型使用场景:统计字符串出现次数
string arr[] = { "苹果", "西瓜", "苹果", "西瓜", "苹果", "香蕉" };
map<string, int> countMap;
for (auto& str : arr)
{
countMap[str]++; // 一行代码完成统计,无需手动判断key是否存在
}
【易错警告】
operator[]会自动插入默认值,即使你只是想查找key是否存在。如果仅需判断key是否存在,应该用find接口,避免不必要的插入操作,影响性能。
九、课程易错点与实现建议
课程中老师反复强调了多个实现过程中的高频踩坑点,这里做完整汇总:
-
分步实现,拒绝一步到位
【课程强提醒】不要一上来就把迭代器、const迭代器、operator[]所有功能一起实现,模板代码的报错信息不直观,叠加太多功能会导致报错无法排查。
正确步骤:泛型红黑树改造 → KeyOfT仿函数 → set/map基础insert → 普通迭代器 → const迭代器 → key不可修改约束 → Insert返回值完善 → operator[]重载,跑通一步再走下一步。 -
KeyOfT仿函数的使用遗漏
红黑树中所有需要比较key的位置,都必须通过仿函数提取key,不能直接比较_data,否则map的pair.second会参与比较,导致排序逻辑完全错误。 -
typename关键字的遗漏
取类模板的内嵌类型时(比如RBTree<...>::Iterator),必须加typename关键字,否则编译器会报错,这是模板编程的高频易错点。 -
迭代器++/–的循环条件写反
右为空时,++的循环条件是cur == parent->_right;左为空时,--的循环条件是cur == parent->_left,条件写反会导致死循环或遍历顺序错误。 -
Insert接口中新节点指针的保存
插入新节点后,旋转变色的逻辑会修改cur的指向,必须用newNode临时变量保存新插入的节点,否则返回的迭代器会指向错误的节点。 -
key的const修饰遗漏
必须给set的T加const K,给map的T加pair<const K, V>,否则key可以被修改,直接破坏红黑树的有序结构。 -
end()的特殊处理
我们用nullptr充当end(),--end()需要单独做特殊处理,找到整棵树的最右节点,否则会出现空指针解引用的崩溃。
十、完整代码实现汇总
1. RBTree.h(最终完整版本)
#pragma once
#include <iostream>
#include <utility>
using namespace std;
enum Colour
{
RED,
BLACK
};
// 红黑树节点结构
template<class T>
struct RBTreeNode
{
T _data;
RBTreeNode<T>* _left;
RBTreeNode<T>* _right;
RBTreeNode<T>* _parent;
Colour _col;
RBTreeNode(const T& data)
:_data(data)
, _left(nullptr)
, _right(nullptr)
, _parent(nullptr)
, _col(RED)
{}
};
// 红黑树迭代器
template<class T, class Ref, class Ptr>
struct RBTreeIterator
{
typedef RBTreeNode<T> Node;
typedef RBTreeIterator<T, Ref, Ptr> Self;
Node* _node;
Node* _root;
RBTreeIterator(Node* node, Node* root)
:_node(node)
,_root(root)
{}
Ref operator*()
{
return _node->_data;
}
Ptr operator->()
{
return &_node->_data;
}
bool operator==(const Self& s) const
{
return _node == s._node;
}
bool operator!=(const Self& s) const
{
return _node != s._node;
}
Self& operator++()
{
if (_node->_right)
{
Node* minLeft = _node->_right;
while (minLeft->_left)
{
minLeft = minLeft->_left;
}
_node = minLeft;
}
else
{
Node* cur = _node;
Node* parent = cur->_parent;
while (parent && cur == parent->_right)
{
cur = parent;
parent = parent->_parent;
}
_node = parent;
}
return *this;
}
Self& operator--()
{
if (_node == nullptr)
{
Node* maxRight = _root;
while (maxRight && maxRight->_right)
{
maxRight = maxRight->_right;
}
_node = maxRight;
}
else if (_node->_left)
{
Node* rightMost = _node->_left;
while (rightMost->_right)
{
rightMost = rightMost->_right;
}
_node = rightMost;
}
else
{
Node* cur = _node;
Node* parent = cur->_parent;
while (parent && cur == parent->_left)
{
cur = parent;
parent = cur->_parent;
}
_node = parent;
}
return *this;
}
};
// 泛型红黑树主类
template<class K, class T, class KeyOfT>
class RBTree
{
typedef RBTreeNode<T> Node;
public:
typedef RBTreeIterator<T, T&, T*> Iterator;
typedef RBTreeIterator<T, const T&, const T*> ConstIterator;
Iterator Begin()
{
Node* minLeft = _root;
while (minLeft && minLeft->_left)
{
minLeft = minLeft->_left;
}
return Iterator(minLeft, _root);
}
Iterator End()
{
return Iterator(nullptr, _root);
}
ConstIterator Begin() const
{
Node* minLeft = _root;
while (minLeft && minLeft->_left)
{
minLeft = minLeft->_left;
}
return ConstIterator(minLeft, _root);
}
ConstIterator End() const
{
return ConstIterator(nullptr, _root);
}
// 插入接口
pair<Iterator, bool> Insert(const T& data)
{
if (_root == nullptr)
{
_root = new Node(data);
_root->_col = BLACK;
return {Iterator(_root, _root), true};
}
KeyOfT kot;
Node* parent = nullptr;
Node* cur = _root;
while (cur)
{
if (kot(cur->_data) < kot(data))
{
parent = cur;
cur = cur->_right;
}
else if (kot(cur->_data) > kot(data))
{
parent = cur;
cur = cur->_left;
}
else
{
return {Iterator(cur, _root), false};
}
}
cur = new Node(data);
Node* newNode = cur;
cur->_col = RED;
if (kot(parent->_data) < kot(data))
{
parent->_right = cur;
}
else
{
parent->_left = cur;
}
cur->_parent = parent;
while (parent && parent->_col == RED)
{
Node* grandfather = parent->_parent;
if (parent == grandfather->_left)
{
Node* uncle = grandfather->_right;
if (uncle && uncle->_col == RED)
{
parent->_col = uncle->_col = BLACK;
grandfather->_col = RED;
cur = grandfather;
parent = cur->_parent;
}
else
{
if (cur == parent->_left)
{
RotateR(grandfather);
parent->_col = BLACK;
grandfather->_col = RED;
}
else
{
RotateL(parent);
RotateR(grandfather);
cur->_col = BLACK;
grandfather->_col = RED;
}
break;
}
}
else
{
Node* uncle = grandfather->_left;
if (uncle && uncle->_col == RED)
{
parent->_col = uncle->_col = BLACK;
grandfather->_col = RED;
cur = grandfather;
parent = cur->_parent;
}
else
{
if (cur == parent->_right)
{
RotateL(grandfather);
parent->_col = BLACK;
grandfather->_col = RED;
}
else
{
RotateR(parent);
RotateL(grandfather);
cur->_col = BLACK;
grandfather->_col = RED;
}
break;
}
}
}
_root->_col = BLACK;
return { Iterator(newNode, _root), true };
}
// 查找接口
Iterator Find(const K& key)
{
KeyOfT kot;
Node* cur = _root;
while (cur)
{
if (kot(cur->_data) < key)
{
cur = cur->_right;
}
else if (kot(cur->_data) > key)
{
cur = cur->_left;
}
else
{
return Iterator(cur, _root);
}
}
return End();
}
private:
// 右旋转
void RotateR(Node* parent)
{
Node* subL = parent->_left;
Node* subLR = subL->_right;
parent->_left = subLR;
if (subLR)
subLR->_parent = parent;
Node* ppnode = parent->_parent;
subL->_right = parent;
parent->_parent = subL;
if (parent == _root)
{
_root = subL;
subL->_parent = nullptr;
}
else
{
if (ppnode->_left == parent)
{
ppnode->_left = subL;
}
else
{
ppnode->_right = subL;
}
subL->_parent = ppnode;
}
}
// 左旋转
void RotateL(Node* parent)
{
Node* subR = parent->_right;
Node* subRL = subR->_left;
parent->_right = subRL;
if (subRL)
subRL->_parent = parent;
Node* ppnode = parent->_parent;
subR->_left = parent;
parent->_parent = subR;
if (parent == _root)
{
_root = subR;
subR->_parent = nullptr;
}
else
{
if (ppnode->_left == parent)
{
ppnode->_left = subR;
}
else
{
ppnode->_right = subR;
}
subR->_parent = ppnode;
}
}
private:
Node* _root = nullptr;
};
2. myset.h(最终完整版本)
#pragma once
#include"RBTree.h"
namespace bit
{
template<class K>
class set
{
struct SetKeyOfT
{
const K& operator()(const K& key)
{
return key;
}
};
public:
typedef typename RBTree<K, const K, SetKeyOfT>::Iterator iterator;
typedef typename RBTree<K, const K, SetKeyOfT>::ConstIterator const_iterator;
iterator begin()
{
return _t.Begin();
}
iterator end()
{
return _t.End();
}
const_iterator begin() const
{
return _t.Begin();
}
const_iterator end() const
{
return _t.End();
}
pair<iterator, bool> insert(const K& key)
{
return _t.Insert(key);
}
iterator find(const K& key)
{
return _t.Find(key);
}
private:
RBTree<K, const K, SetKeyOfT> _t;
};
}
3. mymap.h(最终完整版本)
#pragma once
#include"RBTree.h"
namespace bit
{
template<class K, class V>
class map
{
struct MapKeyOfT
{
const K& operator()(const pair<const K, V>& kv)
{
return kv.first;
}
};
public:
typedef typename RBTree<K, pair<const K, V>, MapKeyOfT>::Iterator iterator;
typedef typename RBTree<K, pair<const K, V>, MapKeyOfT>::ConstIterator const_iterator;
iterator begin()
{
return _t.Begin();
}
iterator end()
{
return _t.End();
}
const_iterator begin() const
{
return _t.Begin();
}
const_iterator end() const
{
return _t.End();
}
pair<iterator, bool> insert(const pair<K, V>& kv)
{
return _t.Insert(kv);
}
iterator find(const K& key)
{
return _t.Find(key);
}
V& operator[](const K& key)
{
pair<iterator, bool> ret = _t.Insert({ key, V() });
iterator it = ret.first;
return it->second;
}
private:
RBTree<K, pair<const K, V>, MapKeyOfT> _t;
};
}
4. Test.cpp(测试代码)
#define _CRT_SECURE_NO_WARNINGS 1
#include<iostream>
#include<string>
using namespace std;
#include"mymap.h"
#include"myset.h"
// 测试set
void test_set()
{
bit::set<int> s;
s.insert(4);
s.insert(14);
s.insert(2);
s.insert(12);
s.insert(222);
// 正向遍历
bit::set<int>::iterator it = s.begin();
while (it != s.end())
{
cout << *it << " ";
++it;
}
cout << endl;
// 反向遍历
bit::set<int>::iterator it2 = s.end();
while (it2 != s.begin())
{
--it2;
cout << *it2 << " ";
}
cout << endl;
}
// 测试map
void test_map()
{
bit::map<string, string> m;
m.insert({ "sort", "排序"});
m.insert({ "left", "左边" });
m.insert({ "right", "右边" });
// operator[]插入+修改
m["insert"] = "插入";
m["string"] = "字符串";
// 遍历
for (auto& e : m)
{
cout << e.first << ":" << e.second << endl;
}
cout << endl;
// 统计次数
string arr[] = { "苹果", "西瓜", "苹果", "西瓜", "苹果", "苹果", "西瓜","苹果", "香蕉", "苹果", "香蕉" };
bit::map<string, int> countMap;
for (auto& str : arr)
{
countMap[str]++;
}
for (auto& e : countMap)
{
cout << e.first << ":" << e.second << endl;
}
}
int main()
{
test_set();
cout << "-------------------------" << endl;
test_map();
return 0;
}

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐



 13
13 0
0- 0



 已为社区贡献5条内容
已为社区贡献5条内容

所有评论(0)