移动机器人模型-Xacro模块化优化
采用Xacro宏语言对机器人模型模块化重构优化,实现参数统一管理、代码重复复用、数学公式动态计算,后续可快速加装摄像头、激光雷达等传感器,适配复杂机器人迭代开发需求,全程操作简单、参数精准、可直接复刻运行。
一、原生URDF建模核心痛点(Xacro优化必要性)
原生URDF仅支持基础XML标签编写,无代码复用、变量定义、数学计算能力,用于简单机器人建模尚可,复杂机器人建模存在明显短板,核心问题如下:
-
参数修改繁琐易出错:机器人底盘、轮子、关节坐标等尺寸参数分散在全文各处,参数变更需手动修改多处代码,且关节安装坐标需人工手动计算,极易出现计算偏差导致模型错位。
-
代码高度冗余重复:左右驱动轮、前后万向轮结构形态、颜色、旋转参数完全一致,仅安装位置不同,原生URDF需重复编写多段相同代码,模型文件冗长杂乱,可读性差。
-
模块化扩展性差:后续加装摄像头、激光雷达等传感器需直接修改主URDF文件,无独立模块拆分,机器人功能迭代、模型二次开发难度大,不符合ROS模块化开发规范。
为解决以上问题,ROS官方推出Xacro(XML Macros)可编程XML宏语言,作为URDF升级版,支持常量定义、数学运算、宏函数封装、文件嵌套包含,实现机器人建模模块化、参数化、轻量化。
二、Xacro核心概念与核心优势
2.1 Xacro基础概念
Xacro是XML宏编程语言,专为ROS机器人建模优化设计,文件后缀为.xacro,兼容所有URDF原生标签语法,新增可编程扩展能力,编写完成后可自动解析编译为标准URDF模型,无需手动适配ROS节点。使用前需在robot根标签中声明Xacro命名空间:xmlns:xacro="http://www.ros.org/wiki/xacro"。
2.2 Xacro核心核心优势
-
参数常量统一管理:所有尺寸、偏移、物理常量集中定义,参数修改仅需改动一处,全局自动生效。
-
数学公式动态计算:支持加减乘除、圆周率运算等可编程计算,无需人工手动核算关节坐标,避免计算失误。
-
宏定义代码复用:将轮子、传感器等重复结构封装为宏函数,按需调用传参即可,大幅精简代码量。
-
模块化分层设计:底盘、传感器拆分独立Xacro文件,通过嵌套包含拼装模型,迭代扩展灵活,便于后期加装各类设备。
9.3 Xacro基础核心语法
-
常量定义:
<xacro:property name="常量名" value="常量值"/>,调用格式:${常量名} -
数学运算:在
${}中嵌套计算公式,支持四则运算、圆周率换算,如${M_PI/2} -
宏函数封装:
<xacro:macro name="宏名" params="输入参数"/>,封装重复代码模块,按需传参调用。
三、Xacro模块化优化机器人完整模型
3.1 创建Xacro标准化目录结构
在urdf目录下新增xacro主目录及sensors传感器子目录,分别存放机器人底盘核心Xacro文件、摄像头、激光雷达传感器模块化文件,目录层级清晰,模块化拆分明确:
cd ~/workspace_hzq/src/xqrobot_description/urdf
mkdir -p xacro/sensors优化后完整核心目录结构:
├── urdf
│ ├── xqrobot_base.urdf # 原生URDF模型文件
│ └── xacro
│ ├── xqrobot_base.xacro # 机器人底盘核心Xacro宏文件
│ ├── xqrobot.xacro # 顶层模型拼装总文件
│ └── sensors
│ ├── camera.xacro # 摄像头传感器模块化Xacro
│ └── lidar.xacro # 激光雷达传感器模块化Xacro
├── launch
│ ├── display_xqrobot.launch # 原生URDF启动文件
│ └── xacro
│ └── display_xqrobot_xacro.launch # Xacro模型启动文件3.2 创建底盘核心Xacro宏文件(xqrobot_base.xacro)
在xacro目录下创建底盘核心宏文件,集中定义所有机器人尺寸常量,封装驱动轮、万向轮、机器人底盘三大宏函数,实现代码复用和参数化配置:
<?xml version="1.0"?>
<robot name="xqrobot" xmlns:xacro="http://www.ros.org/wiki/xacro">
<!-- 全局参数常量统一集中定义 -->
<xacro:property name="M_PI" value="3.1415926"/>
<xacro:property name="base_radius" value="0.10"/>
<xacro:property name="base_length" value="0.08"/>
<xacro:property name="wheel_radius" value="0.0325"/>
<xacro:property name="wheel_length" value="0.015"/>
<xacro:property name="wheel_joint_y" value="0.1"/>
<xacro:property name="wheel_joint_z" value="0.015"/>
<xacro:property name="caster_radius" value="0.0075"/>
<xacro:property name="caster_joint_x" value="0.1"/>
<!-- 全局材质颜色定义 -->
<material name="yellow">
<color rgba="1 0.4 0 1"/>
</material>
<material name="black">
<color rgba="0 0 0 0.95"/>
</material>
<material name="white">
<color rgba="1 1 1 0.9"/>
</material>
<material name="blue">
<color rgba="0 0 1 1"/>
</material>
<!-- 驱动轮通用宏封装:传参轮子名称、左右偏移系数 -->
<xacro:macro name="wheel" params="prefix reflect">
<joint name="${prefix}_wheel_joint" type="continuous">
<origin xyz="0 ${reflect*wheel_joint_y} ${-wheel_joint_z}" rpy="0 0 0"/>
<parent link="base_link"/>
<child link="${prefix}_wheel_link"/>
<axis xyz="0 1 0"/>
</joint>
<link name="${prefix}_wheel_link">
<visual>
<origin xyz="0 0 0" rpy="${M_PI/2} 0 0" />
<geometry>
<cylinder radius="${wheel_radius}" length = "${wheel_length}"/>
</geometry>
<material name="white" />
</visual>
</link>
</xacro:macro>
<!-- 万向支撑轮通用宏封装:传参轮子名称、前后偏移系数 -->
<xacro:macro name="caster" params="prefix reflect">
<joint name="${prefix}_caster_joint" type="continuous">
<origin xyz="${reflect*caster_joint_x} 0 ${-wheel_joint_z}" rpy="0 0 0"/>
<parent link="base_link"/>
<child link="${prefix}_caster_link"/>
<axis xyz="0 1 0"/>
</joint>
<link name="${prefix}_caster_link">
<visual>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<sphere radius="${caster_radius}" />
</geometry>
<material name="black" />
</visual>
</link>
</xacro:macro>
<!-- 机器人底盘整体宏封装 -->
<xacro:macro name="xqrobot_base">
<link name="base_footprint">
<visual>
<origin xyz="0 0 0" rpy="0 0 0" />
<geometry>
<box size="0.001 0.001 0.001" />
</geometry>
</visual>
</link>
<joint name="base_footprint_joint" type="fixed">
<origin xyz="0 0 ${base_length/2 + wheel_joint_z}" rpy="0 0 0" />
<parent link="base_footprint"/>
<child link="base_link" />
</joint>
<link name="base_link">
<visual>
<origin xyz=" 0 0 0" rpy="0 0 0" />
<geometry>
<cylinder length="${base_length}" radius="${base_radius}"/>
</geometry>
<material name="yellow" />
</visual>
</link>
<!-- 调用轮子宏生成左右驱动轮、前后万向轮 -->
<wheel prefix="left" reflect="1"/>
<wheel prefix="right" reflect="-1"/>
<caster prefix="front" reflect="1"/>
<caster prefix="back" reflect="-1"/>
</xacro:macro>
</robot>3.3 创建传感器模块化Xacro文件
3.3.1 摄像头传感器模型(camera.xacro)
在sensors目录创建摄像头模块化文件,封装摄像头外形宏函数,后续可直接调用装配至机器人底盘:
<?xml version="1.0"?>
<robot xmlns:xacro="http://www.ros.org/wiki/xacro" name="camera">
<xacro:macro name="usb_camera" params="prefix:=camera">
<link name="${prefix}_link">
<visual>
<origin xyz=" 0 0 0 " rpy="0 0 0" />
<geometry>
<box size="0.02 0.03 0.03" />
</geometry>
<material name="blue"/>
</visual>
</link>
</xacro:macro>
</robot>3.3.2 激光雷达传感器模型(lidar.xacro)
在sensors目录创建激光雷达模块化文件,适配雷达网格模型,配置惯性、碰撞、可视化参数:
<?xml version="1.0"?>
<robot xmlns:xacro="http://www.ros.org/wiki/xacro" name="lidar">
<xacro:macro name="lidar" params="prefix:=lidar">
<link name="${prefix}_link">
<collision>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<box size="0.1 0.1 0.1"/>
</geometry>
</collision>
<visual>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<mesh filename="package://xqrobot_description/meshes/hokuyo.dae"/>
</geometry>
</visual>
<inertial>
<mass value="1e-5" />
<origin xyz="0 0 0" rpy="0 0 0"/>
<inertia ixx="1e-6" ixy="0" ixz="0" iyy="1e-6" iyz="0" izz="1e-6" />
</inertial>
</link>
</xacro:macro>
</robot>3.4 创建顶层模型拼装总文件(xqrobot.xacro)
通过文件嵌套包含,导入底盘和所有传感器模块化文件,配置传感器安装偏移参数,固定传感器与底盘关节连接,实现整机模型拼装,无需修改底层核心代码:
<?xml version="1.0"?>
<robot name="xqbot" xmlns:xacro="http://www.ros.org/wiki/xacro">
<!-- 嵌套包含底盘及传感器模块化Xacro文件 -->
<xacro:include filename="$(find xqrobot_description)/urdf/xacro/xqrobot_base.xacro"/>
<xacro:include filename="$(find xqrobot_description)/urdf/xacro/sensors/camera.xacro" />
<xacro:include filename="$(find xqrobot_description)/urdf/xacro/sensors/lidar.xacro" />
<!-- 传感器安装偏移参数常量定义 -->
<xacro:property name="camera_offset_x" value="0.18" />
<xacro:property name="camera_offset_y" value="0" />
<xacro:property name="camera_offset_z" value="0.09" />
<xacro:property name="lidar_offset_x" value="0.1" />
<xacro:property name="lidar_offset_y" value="0" />
<xacro:property name="lidar_offset_z" value="0.10" />
<!-- 调用底盘宏生成机器人基础底盘 -->
<xqrobot_base/>
<!-- 固定摄像头与底盘连接关节 -->
<joint name="camera_joint" type="fixed">
<origin xyz="${camera_offset_x} ${camera_offset_y} ${camera_offset_z}" rpy="0 0 0" />
<parent link="base_link"/>
<child link="camera_link"/>
</joint>
<!-- 固定激光雷达与底盘连接关节 -->
<joint name="lidar_joint" type="fixed">
<origin xyz="${lidar_offset_x} ${lidar_offset_y} ${lidar_offset_z}" rpy="0 0 0" />
<parent link="base_link"/>
<child link="lidar_link"/>
</joint>
<!-- 调用传感器宏生成摄像头和激光雷达模型 -->
<xacro:usb_camera prefix="camera"/>
<xacro:lidar prefix="lidar"/>
</robot>四、创建Xacro模型专用RViz启动launch文件
无需手动将Xacro转换为URDF,通过launch文件调用Xacro解析器,启动时自动编译解析Xacro文件为标准URDF,一键启动可视化及TF发布节点:
4.1 创建Xacro启动launch文件
mkdir ~/workspace_hzq/src/xqrobot_description/launch/xacro
touch ~/workspace_hzq/src/xqrobot_description/launch/xacro/display_xqrobot_xacro.launch4.2 写入Xacro启动完整代码
<?xml version="1.0"?>
<launch>
<arg name="model" default="$(find xacro)/xacro --inorder '$(find xqrobot_description)/urdf/xacro/xqrobot.xacro'" />
<arg name="gui" default="true" />
<param name="robot_description" command="$(arg model)" />
<param name="use_gui" value="$(arg gui)"/>
<node name="joint_state_publisher_gui" pkg="joint_state_publisher_gui" type="joint_state_publisher_gui" />
<node name="robot_state_publisher" pkg="robot_state_publisher" type="robot_state_publisher" />
<node name="rviz" pkg="rviz" type="rviz" args="-d $(find xqrobot_description)/config/xqrobot_urdf.rviz" required="true" />
</launch>五、启动Xacro优化模型及TF拓扑查看
5.1 启动Xacro机器人可视化模型
roslaunch xqrobot_description display_xqrobot_xacro.launch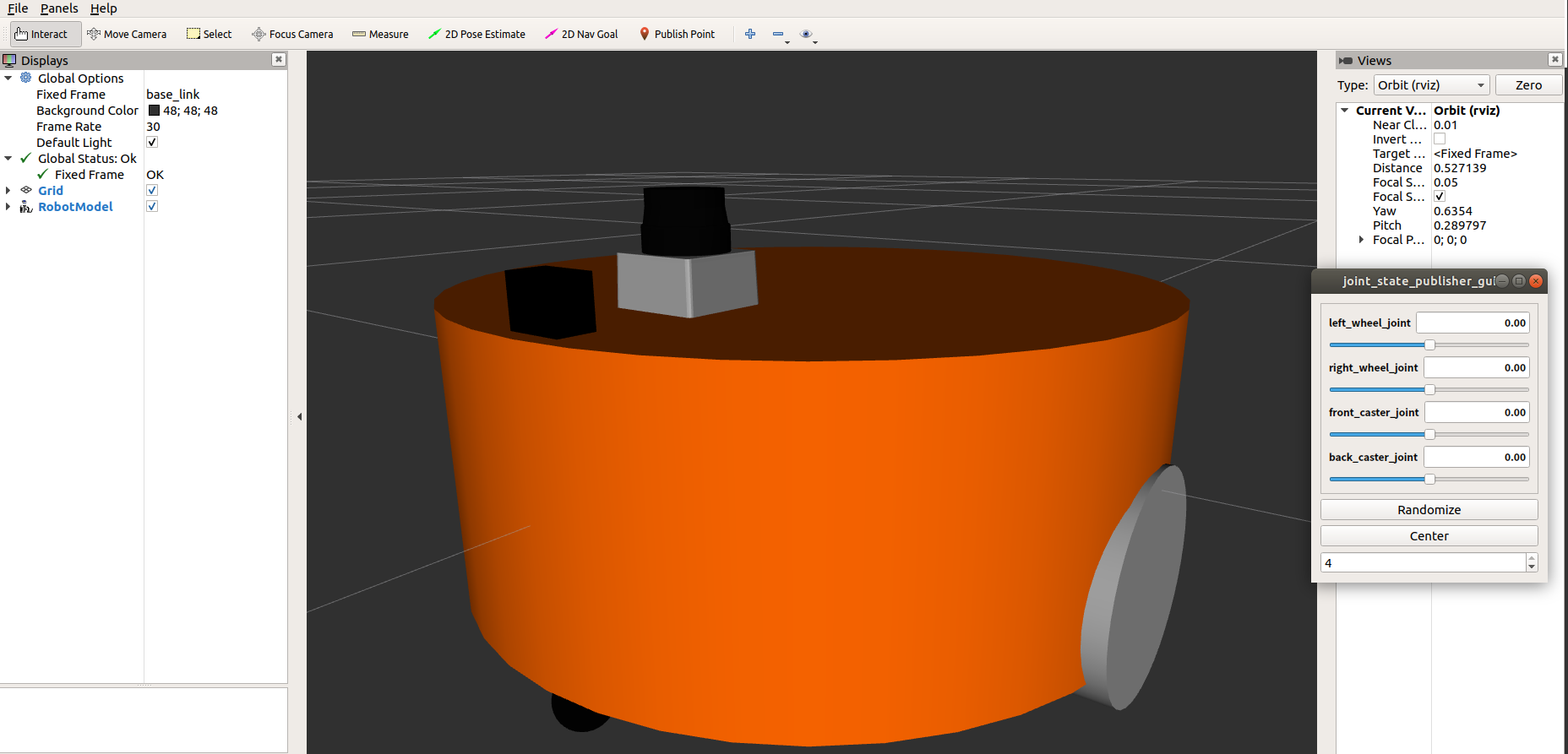
5.2 查看机器人TF坐标拓扑树
通过rqt_tf_tree工具可视化查看机器人所有连杆、传感器坐标变换关系,确认底盘、轮子、摄像头、激光雷达TF连接正常,无坐标异常断开问题:
rosrun rqt_tf_tree rqt_tf_tree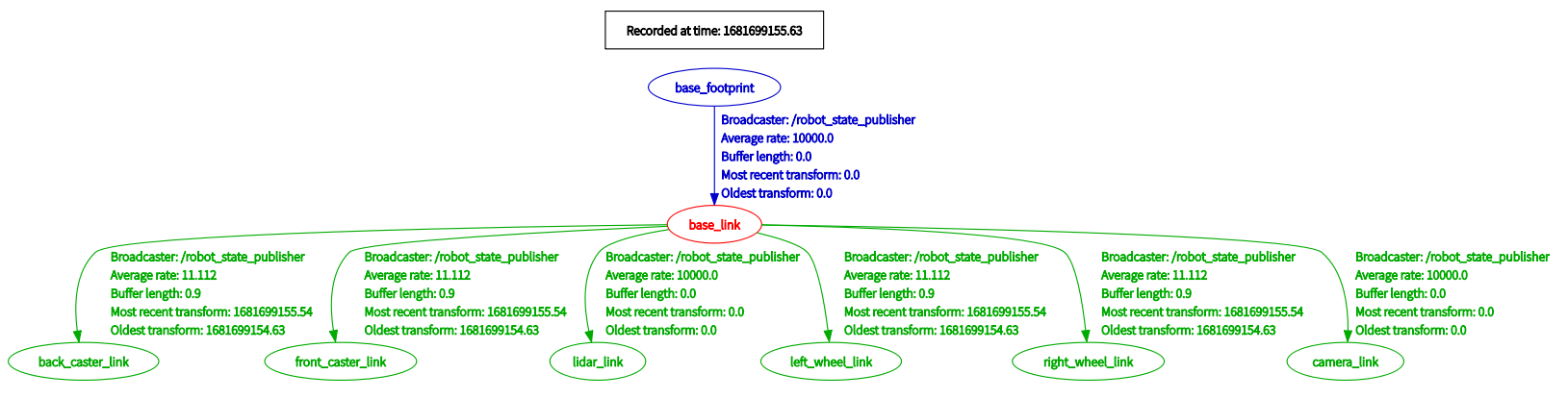
六、总结
本文先完成四轮圆柱移动机器人原生URDF模型全流程从零搭建,覆盖功能包创建、模型编写、语法校验、RViz可视化基础实操;针对原生URDF代码冗余、参数修改繁琐、复用性差等核心痛点,采用Xacro宏语言完成模型全模块化优化,实现参数集中管控、数学公式动态计算、重复结构宏函数复用、传感器独立模块化加装。优化后的Xacro模型代码简洁清晰、迭代扩展性强,后续新增传感器、调整机器人尺寸仅需修改对应常量参数或调用宏函数,无需大面积改动核心代码,完全适配ROS复杂机器人仿真、导航、实物驱动等二次开发工作,是ROS机器人标准化建模的必用优化方案。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐
 10
10 0
0- 0



 已为社区贡献4条内容
已为社区贡献4条内容

所有评论(0)