基于DTC直接转矩控制的异步电机调速系统Simulink建模与仿真
目录
✨1.课题概述
直接转矩控制(DTC)是继矢量控制之后异步电机高性能调速的核心控制策略,区别于矢量控制复杂的坐标解耦与电流闭环调节逻辑,DTC摒弃了转子磁场定向、旋转坐标变换等复杂运算,直接以电机定子磁链与电磁转矩为核心控制目标,依托定子侧电压矢量的实时选择,快速调节磁链幅值与转矩大小,具备动态响应速度快、控制结构简单、参数鲁棒性强、低速控制性能优异等优势,广泛应用于工业变频调速、轨道交通、新能源传动等异步电机驱动场景。
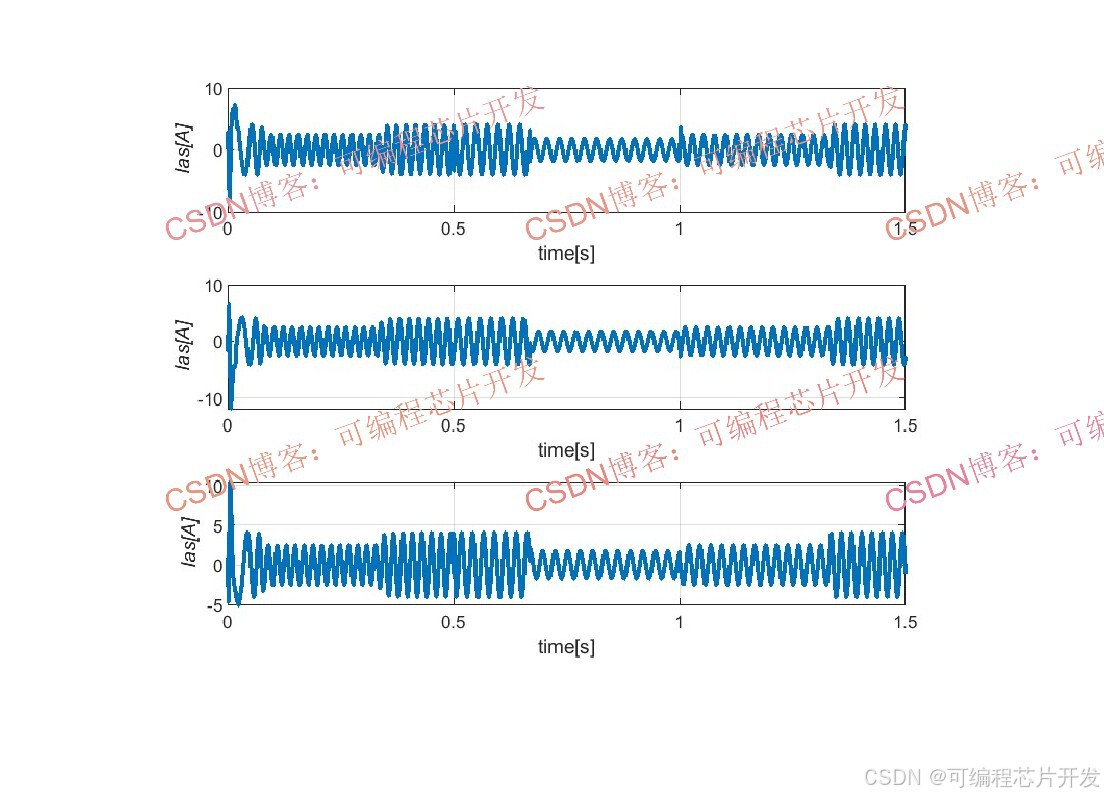
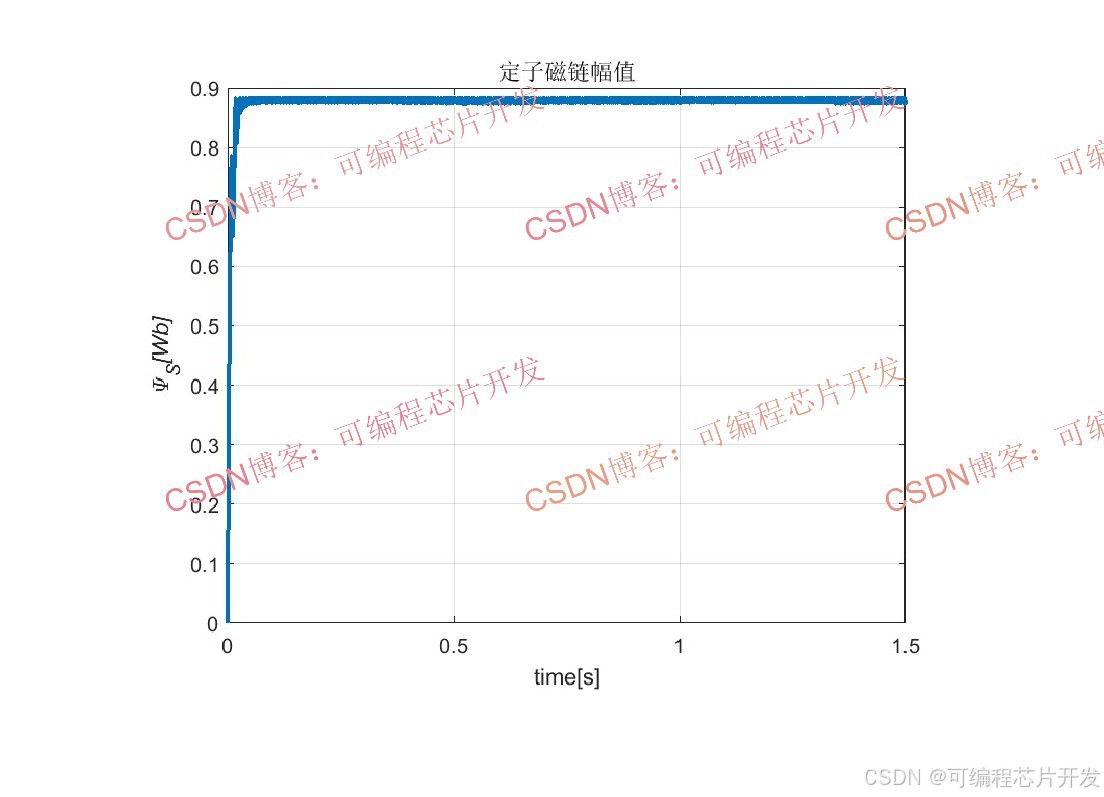
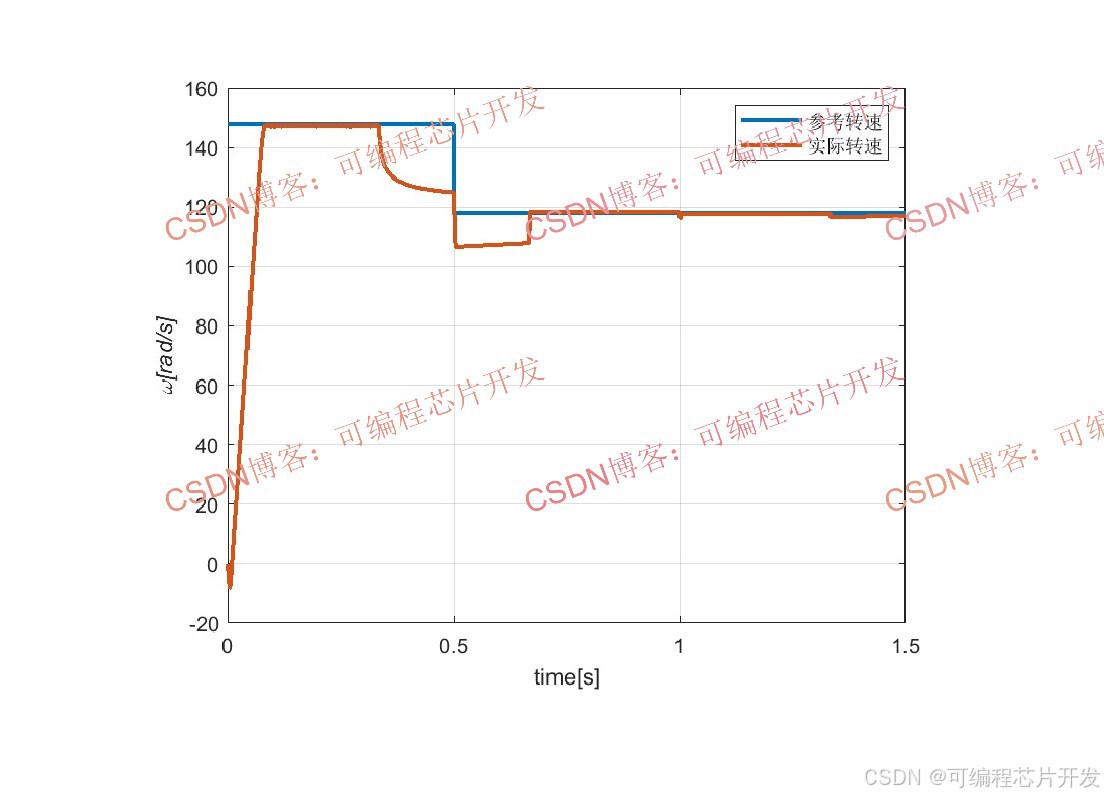
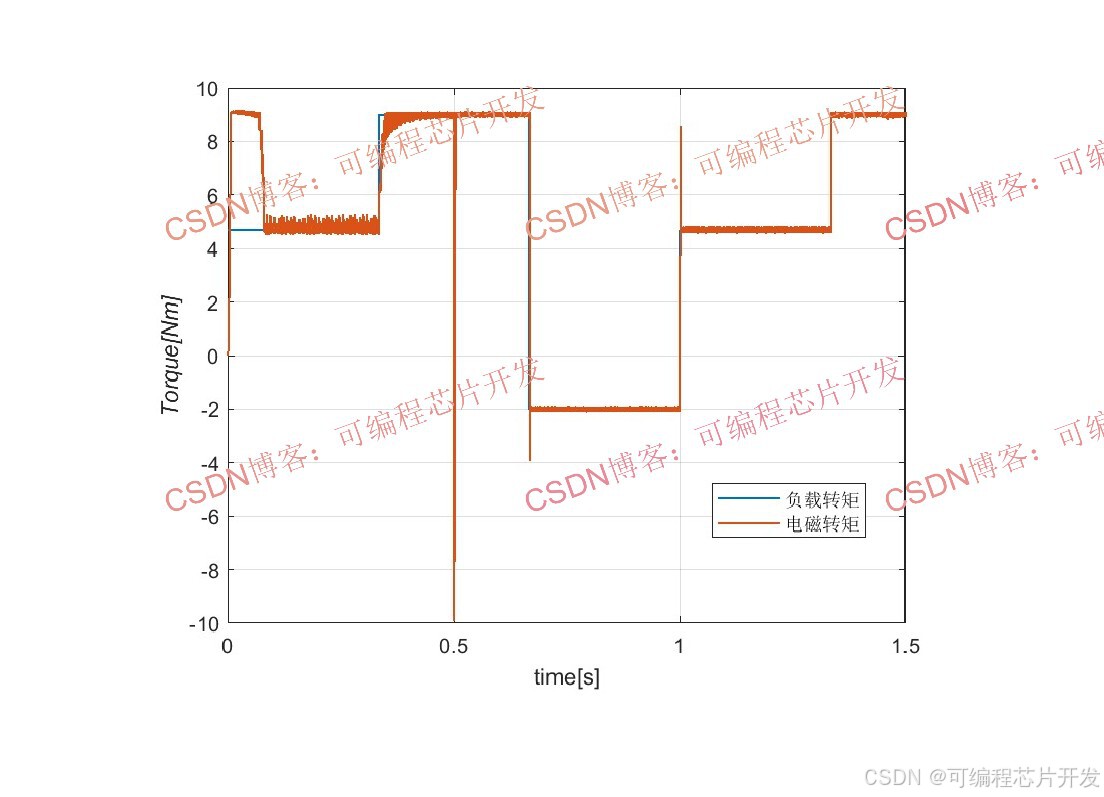
📊2.系统仿真结果
✅3.核心程序或模型
版本:Matlab2024b
%定子电阻
Rs = 11.6;
%转子电阻
Rr = 10.4;
%定子电感
Ls = 0.579;
%转子电感
Lr = 0.579;
%互感
Lm = 0.557;
%转动惯量
J = 0.002;
%电机极对数
p = 2;
%额定频率
f = 50;
%额定功率
Pn = 750;
%额定转速
Nn = 1410;
%额定相电压
Ufn= 220;
%同步角速度
Ws = 2*pi*f/p;
%额定机械角速度
Wn = Nn*(2*pi/60);
%额定转差率
sn = (Ws-Wn)/Wn;
%额定电磁转矩
Mn =(3*p*(Ufn*Ufn/Ws)*(Rr/sn))/((Rs+(Rr/sn))^2+(Ws*Ws)*(Ls+Lr)^2);
%漏磁系数
sigma = Ls*Lr-Lm*Lm;
%直流母线电压
Vdc = 3*sqrt(3)*220*sqrt(2)/pi;
% 定子磁链滞环宽度
dPSIs = 0.1;
% 电磁转矩滞环宽度
dMe = 0.4;
% 控制周期,单位:秒
Ts = 1e-5;
%时间常数
T = 0.6e-4;
%PI控制器比例系数
Kp = 0.2027*(2*J/T);
%PI控制器积分系数
Ki = 0.03512*(2*J/T);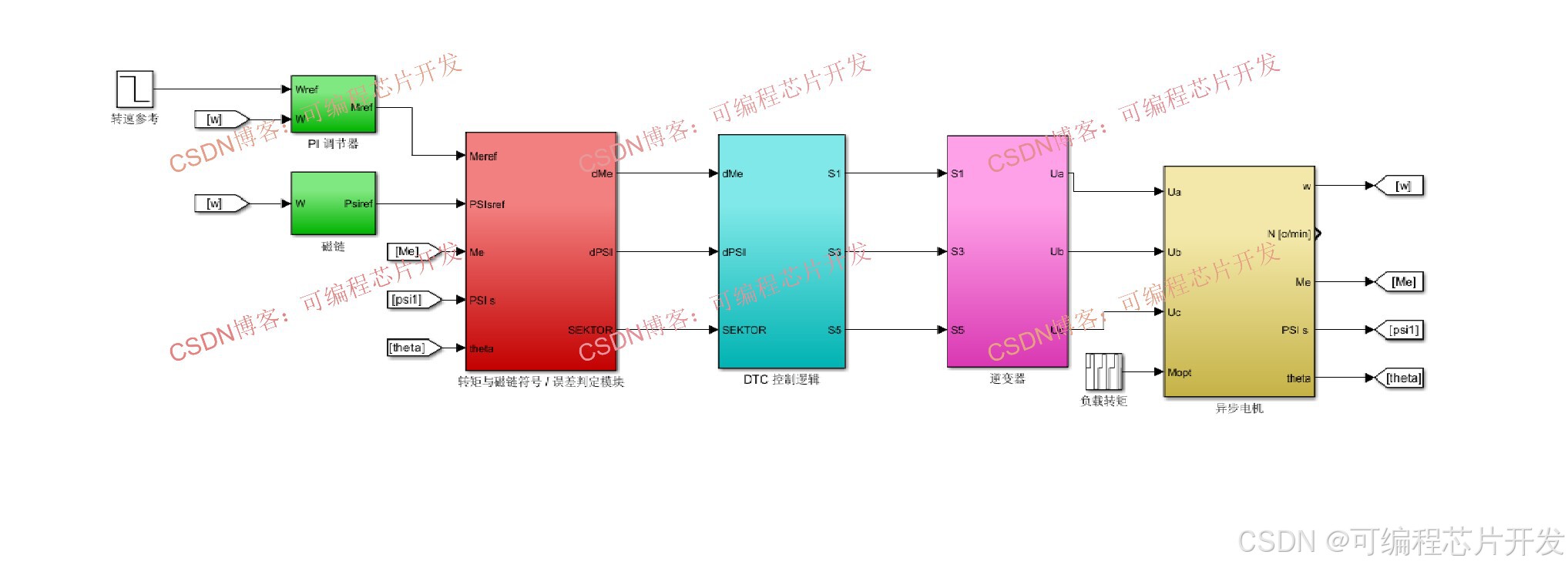
🚀4.系统原理简介
异步电机运行过程中,定子通入三相交变电压会产生旋转定子磁链,定子磁链与转子磁链之间的空间夹角直接决定电磁转矩输出大小。矢量控制通过解耦励磁电流与转矩电流间接调控转矩,而 DTC控制的核心逻辑为直接闭环管控定子磁链幅值与电磁转矩,利用三相两电平逆变器输出的八个基本电压矢量,根据磁链偏差、转矩偏差以及定子磁链空间扇区位置,实时筛选最优电压矢量施加至电机定子绕组。
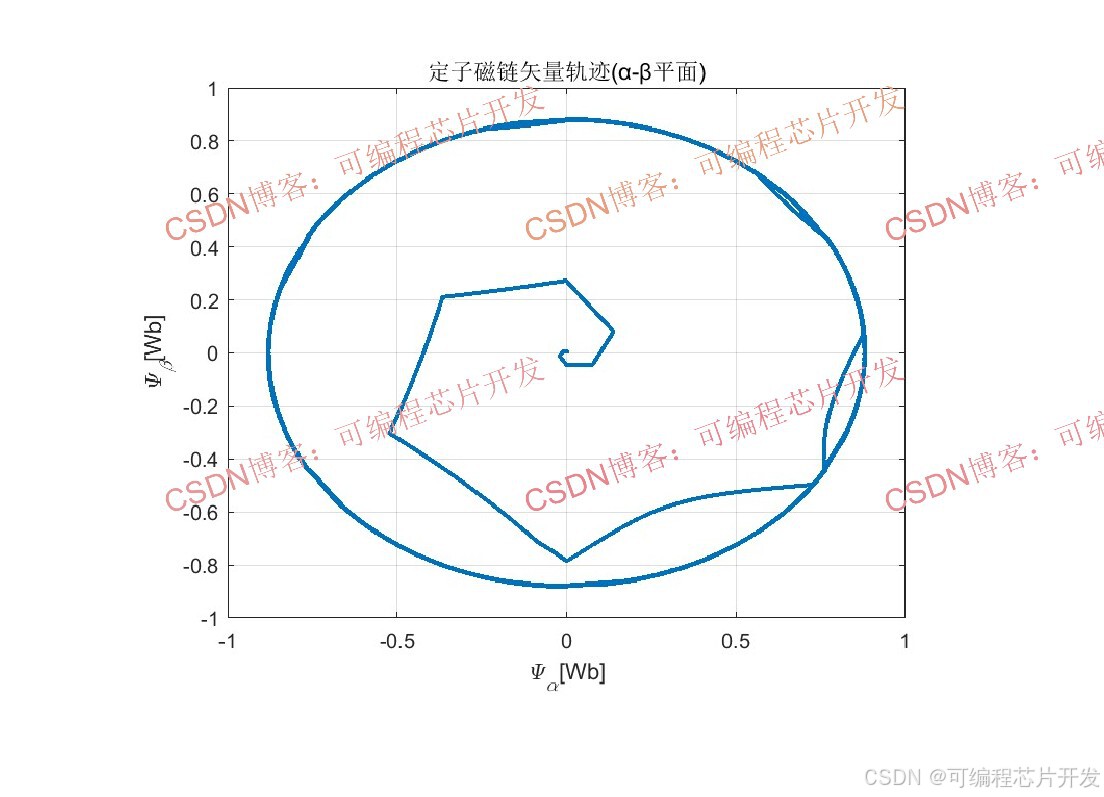
定子电压矢量会直接改变定子磁链的运动轨迹与旋转速度:有效电压矢量可推动定子磁链向前旋转、增大磁链幅值或提升电磁转矩;零电压矢量能够锁死定子磁链运动,维持磁链幅值稳定、抑制转矩快速上升。通过滞环比较器对磁链和转矩的偏差进行区间判断,配合扇区定位划分定子磁链空间位置,实现电压矢量的动态切换,让定子磁链沿近似圆形轨迹运转,同时保证电磁转矩快速跟随给定值,最终完成异步电机的宽范围平滑调速。
DTC仅依赖定子电阻参数即可完成观测计算,无需依赖转子电阻、电感等易受温度、工况影响的电机参数,相较于矢量控制,大幅降低了参数漂移带来的控制失效风险,动态转矩响应时间可压缩至毫秒级,适合负载突变、快速加减速等复杂工况下的异步电机控制。
具体实现步骤如下:
4.1 三相定子电压、电流信号采集与坐标变换
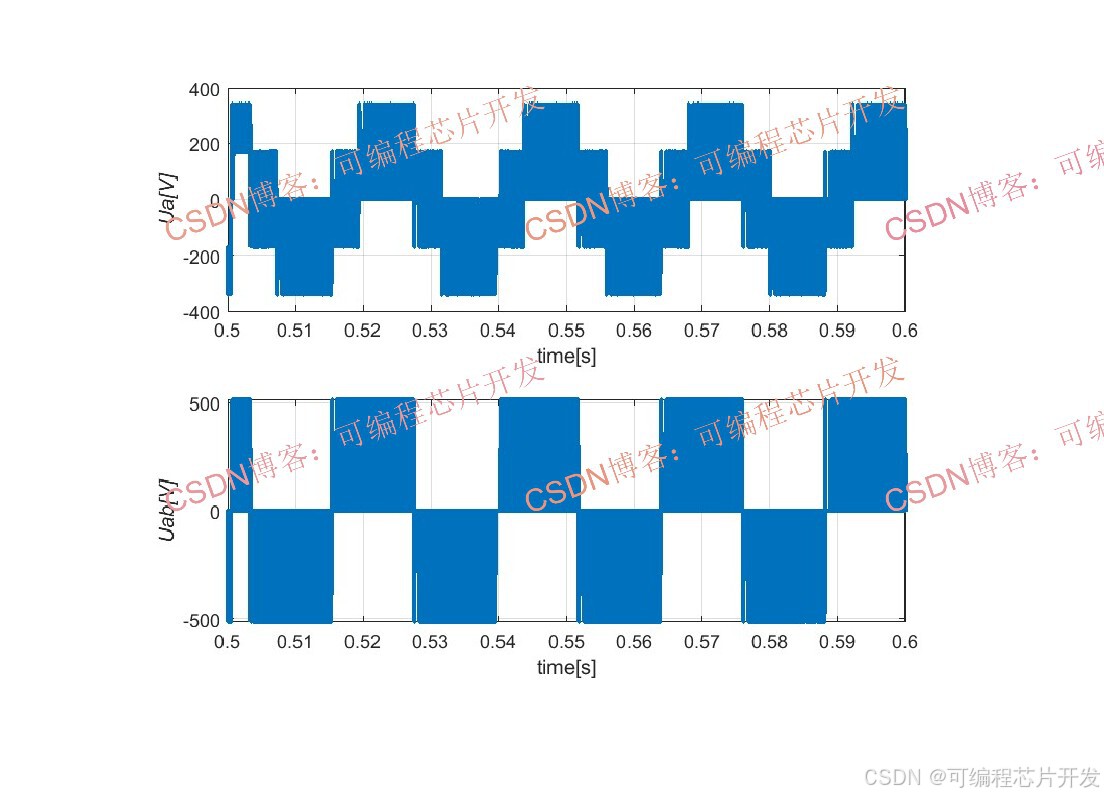
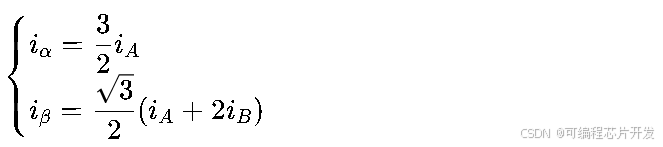
控制系统通过电压传感器、电流传感器实时采集异步电机三相定子电压Ua、Ub、Uc与三相定子电流ia、ib、ic。由于三相电机为对称系统,三相物理量之和始终为零,只需采集两相信号即可完成运算,再通过克拉克变换将三相静止ABC坐标系信号转换为两相静止αβ坐标系分量,减少运算维度。
三相电流克拉克变换公式:
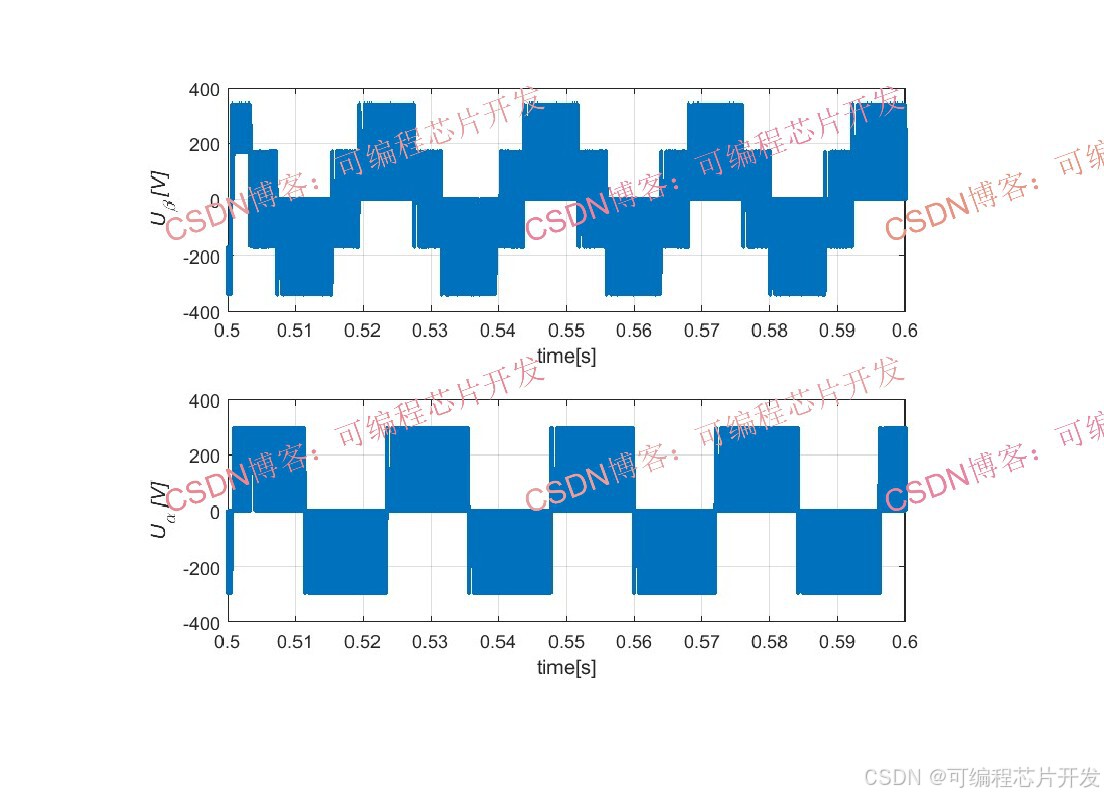
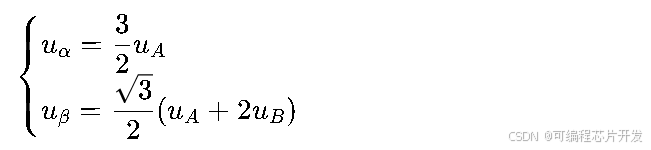
三相定子电压同步完成坐标变换,得到alpha、beta轴电压分量,为磁链积分运算提供输入:
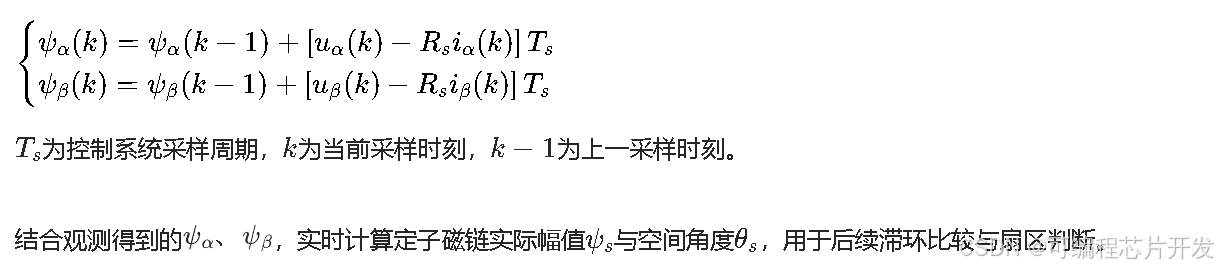
4.2 定子磁链实时观测与幅值计算
将变换后Ualpha、Ubeta,Ialpha、Ibeta的代入前文定子磁链积分公式,通过离散积分算法完成实时磁链观测,工程实际中采用离散化积分替代纯积分,避免直流偏置与积分饱和问题。离散化后的磁链递推计算公式:
4.3 电磁转矩实时估算
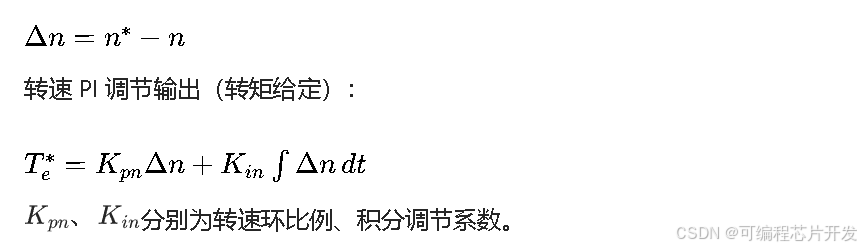
将观测磁链分量与采样电流分量代入电磁转矩计算公式,实时计算电机当前输出转矩Te,作为转矩闭环的反馈信号。调速系统外部给定转矩Te∗由转速外环调节器输出,转速传感器采集电机实际转速n,与转速给定n∗做差值运算,经PI调节器调节后生成转矩给定值,构建转速-转矩双闭环控制结构。转速外环偏差计算:
💢5.完整工程文件
v v
关注后,GZH回复关键词:a39
或回复关键词:DTC

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐
 8
8 0
0- 0



 已为社区贡献13条内容
已为社区贡献13条内容

所有评论(0)